1.本发明总体上涉及一种混合动力电动车辆,并且特别地涉及一种用于混合动力电动轮式车辆的电池充电系统。
背景技术:
2.在过去的几十年里,汽车工业在技术和销售方面都有了显著的增长和发展。由于技术的不断进步,诸如自行车、摩托车、速克达(scooter)和轻型速克达的车辆成功地依然受到社会不同阶层的欢迎。社会不同阶层基于他们的需求将车辆用于各种目的,诸如娱乐活动、交通工具和体育活动。因此,汽车工业不断开发并修改车辆的部件以适应不同骑行者的需求变得非常重要。
3.根据同样的思想,开发了用于车辆的各种类型的牵引机构。例如,混合动力电动车辆涉及两种牵引机构,两种牵引机构包括基于内燃机的牵引机构和基于电动马达的牵引机构。常规上,用于混合动力电动车辆的电动马达由安装在混合动力电动车辆内的电池提供动力。通常,电池通过混合动力电动车辆中可用的充电插头由外部电源充电,或者通过混合动力电动车辆中提供的电压源逆变器(voltage source inverter)充电。电压源逆变器在某些要求的条件下(诸如在制动或低电池充电状态(以下称为soc)条件下)为电池充电。
4.通常,电压源逆变器可以只在预限定马达速度范围内给电池充电,而通过充电插头的外部电源只能以电池中的最小可用电压充电。如果马达速度高于预限定车辆速度范围,则电压源逆变器将与电池断开,以避免在基于内燃机的牵引过程中对电池造成任何损坏。此外,如果电池处于深度放电状态,则提供的充电插头无法通过外部电源为电池充电。在这种情况下,用户必须使用特定的充电机制,该特定的充电机制仅在选定的位置(诸如车辆服务站和车辆经销商位置)可用。这给混合动力电动车辆的用户带来了不适且需要用户额外努力。
5.因此,需要一种能够解决上述问题和其它问题的系统。
技术实现要素:
6.本主题提供了一种具有电池充电系统的混合动力电动车辆。混合动力电动车辆的电池充电系统包括电池、电池管理系统和支持单元。
7.本主题的一个特征是电池直接连接到电池管理系统。支持单元通过电池管理系统连接到电池。支持单元由电池和马达的反电动势提供动力。此外,连接到混合电动车辆的磁电机的整流器和调节器单元也为支持单元提供动力。
8.本主题的又一特征是支持单元包括电子控制单元、电压源逆变器和升压转换器。电子控制单元可通信地连接到电池管理系统,并且设置有预限定马达速度常数s和预限定电池充电状态值。另外,电子控制单元使用一个或多个感测单元接收实时马达速度s
rt
,并从电池管理系统接收电池的实时充电状态值。
9.本主题的一个特征是预限定马达速度常数对于任何马达都是固定值,并且是马达
速度和在该速度下产生的反电动势电压的函数。预限定马达速度常数限定了马达速度带,马达速度带包括较高带值和较低带值。较高带值限定了马达的最高速度,而较低带值限定了混合动力电动车辆的预空转速度。
10.本主题的另一个特征是预限定充电状态值限定了电池的预限定最小充电状态值和预限定最大充电状态值。
11.本主题的一个特征是电压源逆变器可通信地连接到电子控制单元、电池管理系统和马达。电压源逆变器还通过第一开关连接到电池管理系统。
12.本主题的又一特征是升压转换器可通信地连接到电子控制单元和电池管理系统。此外,升压转换器连接到整流器和调节器单元并由其提供动力。
13.本主题的目的是电子控制单元接收实时马达速度和电池的实时充电状态值,并基于实时马达速度和电池的实时充电状态值中的一者产生第一激活信号或第二激活信号。
14.本主题的另一个目的是电池管理系统在产生第一激活信号时启动电压源逆变器充电模式。类似地,电池管理系统在产生第二激活信号时启动升压转换器充电模式。
15.本主题的目的是如果电池的实时充电状态值大于预限定最小充电状态值,则电子控制单元产生第一激活信号。此外,如果实时马达速度位于较高带值与较低带值之间,则电子控制单元产生第一激活信号。
16.本主题的另一个目的是,如果电池的实时充电状态值小于预限定最小充电状态值,则电子控制单元产生第二激活信号。此外,如果实时马达速度大于较高带值,则电子控制单元产生第二激活信号。如果实时马达速度小于较低带值,电子控制单元也产生第二启动信号。
17.本主题的另一个目的是,如果电池的实时充电状态值大于预限定最大充电状态值,则电子控制单元禁用电池管理系统以停用升压转换器充电模式和电压源逆变器充电模式(以下称为vsi充电模式)。
18.本主题的一个重要特征是能够在各种马达速度带中对电池进行不间断充电。例如,在指定带值内,即在较低带值与较高带值之间,通过电压源逆变器给电池充电。高于该较高带值时,因为电池管理系统由于高马达速度下产生的非常高的电压水平而断开,所以电压源逆变器无法给电池充电。因此,本主题的优点在于,升压转换器向电池管理系统提供输入,以使得在车辆高速期间在超过较高带值时能够对电池进行充电。
19.本主题的一个重要特征是,当电池低于预限定充电状态值时,升压转换器给电池充电。因此,本发明的一个优点是,即使在深度放电的情况下,用户也可以给电池充电,并且不需要将车辆带到任何特定地点来解决问题。因此,本主题为车辆用户提供了可用性和舒适性。
20.本发明主题的又一个重要特征是,当实时马达速度小于较低带值时,即当车辆达到预空转马达速度时,升压转换器给电池充电。本发明的优点是,在制动和静止状态期间,由升压转换器使用静止发动机能量为电池充电。这为混合动力电动汽车带来了更好的燃料和电池效率。
21.以上提供的发明内容解释了本发明的基本特征,但是并不限制本发明的范围。从下面参考附图的描述中,本发明的本质和进一步的特征将变得更加清楚。
附图说明
22.参考附图提供具体实施方式。在所有附图中使用相同的附图标记来指代相似的特征和部件。
23.图1示出了根据本主题的实施例的常规两轮混合动力电动车辆。
24.图2示出了根据图1中描绘的实施例的常规两轮混合动力车辆的框图,描绘了推进系统、电气负载的动力供应机构和现有的电池充电机构。
25.图3描绘了流程图,该流程图描述根据图2中描绘的实施例的常规两轮混合动力车辆的现有的电池充电机构。
26.图4示出了根据图1的实施例的常规车辆的框图,描绘了描述本主题的电池充电系统。
27.图5(图5a和图5b)描绘了根据图4中描绘的实施例的描述了描述本主题的电池充电系统的启用的流程图。
28.图6描绘了根据图4、图5a和图5b中描绘的实施例的描述本主题的基于深度放电充电格式的电池充电系统的图形表示。
29.图7描绘了根据图4、图5a和图5b中描绘的实施例的描述本主题的基于马达速度带格式的电池充电系统的图形表示。
具体实施方式
30.本主题提供了如图1所示的示例性混合电动两轮车辆(以下称为“车辆”)100。所描述的车辆(100)通常包括低框架结构(以下称为“框架”)(101)、多个车身面板(102)、座椅组件(103)、实用盒(未示出)、前轮(104)、后轮(105)、多个悬架单元(106)、内燃发动机(以下称为“发动机”)(107)、轮毂型电动马达(以下称为“马达”)(108)(如图2所示)、传动系统(109)、多个电气和电子部件、以及电池(110)(如图2所示)。
31.框架(101)包括头管(101a)、主管(101b)和一对侧框架(101c)。主管(101b)从头管(101a)的前部向下延伸,然后以倾斜的方式向后延伸。所述对侧管(101c)从主管(101b)在车辆(100)的向后方向上倾斜地向上延伸。因此,框架(101)沿着车辆纵向方向(aa’)从车辆(100)的前部(f)延伸到后部(r)。
32.多个车身面板(102)覆盖框架(101)的多个部分。多个车身面板(102)包括前面板(102a)、腿部护罩(102b)、底板(102c)、座椅下盖(102d)、左侧面板(102e)、右侧面板(未示出)、左侧装饰盖(102f)和右侧装饰盖(未示出)。前面板(102a)和腿部护罩(102b)覆盖框架(101)的前部,特别是通过覆盖头管(101a)以及主管(101b)的前部来覆盖框架(101)的前部。底板(102c)、座椅下盖(102d)、左侧装饰盖(102f)和右侧装饰盖(未示出)保护框架(101)的中央部分,特别是通过覆盖主管(101b)的中央和后部来保护框架(101)的中央部分。类似地,左侧面板(102e)和右侧面板(未示出)覆盖框架(101)的后端,特别是通过覆盖所述对侧管(101c)来覆盖框架(101)的后端。
33.座椅组件(103)设置在座椅下盖(102d)上方,并且位于左侧面板(102e)与右侧面板(未示出)之间。座椅组件(103)枢转地安装到座椅下盖(102d)的顶部。实用盒(未示出)设置在座椅组件(103)下方。可以通过打开座椅组件103来进入实用盒(未示出)。
34.前轮(104)设置在车辆(100)的前部f,在前挡泥板(104a)下方。前挡泥板(104a)进
一步设置在前盖(102a)和腿部护罩(102b)下方。前挡泥板(104a)覆盖前轮(104)的至少一部分。前轮(104)包括彼此可拆卸地附接的前轮毂(104b)和前轮胎(104c)。
35.后轮(105)设置在车辆(100)的后部r,在后挡泥板(105a)下方。后挡泥板(105a)进一步设置在左侧面板(102d)和右侧面板(未示出)的下方且在它们之间。后挡泥板(105a)覆盖后轮(105)的至少一部分。后轮(105)包括彼此可拆卸地附接的后轮毂(105b)和后轮胎(105c)。
36.多个悬架单元(106)包括前悬架单元(106a)和后悬架单元(106b)。前悬架单元(106a)通过前轮毂(104b)将前轮(104)连接到框架(101)的前部。后悬架单元(106b)通过后轮毂(105b)将后轮(105)连接到框架(101)的后部。前悬架单元(106a)和后悬架单元(106b)可以包括一个或多个悬架单元。例如,前悬架单元(106a)可以包括左前悬架单元和右前悬架单元。类似地,后悬架单元(106b)可以包括左后悬架单元和右后悬架单元。
37.发动机(107)设置在底板(102c)和座椅下盖(102d)的后面,并支撑在所述对侧管(101c)之间。发动机(107)通过附接于其中的一个或多个安装凸台(未示出)而设置在摆臂(107a)上。摆臂(107a)的前端附接到主管(101b)的后部,而摆臂(107a)的后端附接到后轮(105)。发动机(107)产生燃料燃烧引起的动力,该动力将在车辆(100)的基于发动机的推进期间传递到后轮(105)。
38.马达(108)(如图2所示)通过马达链轮(未示出)安装在后轮(105)的后轮毂(105b)上。马达(108)产生电力,将产生的电力在车辆(100)的基于马达的推进期间传递到后轮(105)。
39.传动系统(109)是车辆(100)的动力传递系统,其基于车辆(100)的推进模式将动力从发动机(107)传输到后轮(105)或从马达(108)传递到后轮(105)。在混合动力型设置中,车辆(100)可以具有多种推进模式,诸如单独由发动机(107)推进、单独由马达(108)推进以及同时由发动机(107)和马达(108)推进。
40.通常,车辆(100)包括四种运行模式。车辆(100)的四种操作模式包括单一发动机模式、单一马达模式、混合动力模式和混合动力经济模式。在单一发动机模式下,发动机(107)单独为车辆(100)提供动力,而在单一马达模式下,马达(108)单独为车辆(100)提供动力。在混合动力模式中,发动机(107)与马达(108)一起为车辆(100)提供动力,而在混合动力经济模式中,马达(108)为车辆(100)提供动力以起动牵引,随后发动机(107)和马达(108)为车辆(100)提供动力以进行过渡牵引,之后仅由发动机(107)提供动力。当起动车辆(100)时,更特别地,在车辆(100)的零速度下,驾驶者可以借助于模式开关(未示出)选择任何操作模式。基于骑行者的选择,传动系统(109)相应地将动力传输到后轮(105)。
41.多个电气和电子部件安装在车辆(100)中的不同位置。多个电气和电子部件可以包括一个或多个电气负载el和一个或多个电子负载ecl。电气负载el可以包括马达(108)、头灯(111)、尾灯(112)、晶体管控制点火(tci)单元(未示出)、起动机马达(未示出)等。电子负载ecl可以包括触摸屏lcd单元(未示出)、微控制器单元mcu(未示出)、液压控制单元(未示出)等。
42.电池(110)(如图2所示)向多个电气和电子部件提供动力,并使用由马达(108)产生的反电动势得到充电。鉴于图2至图9,进一步详细描述了本主题,描述了现有的充电系统及其缺点,以及具有优于现有的缺点的优点的新充电系统。
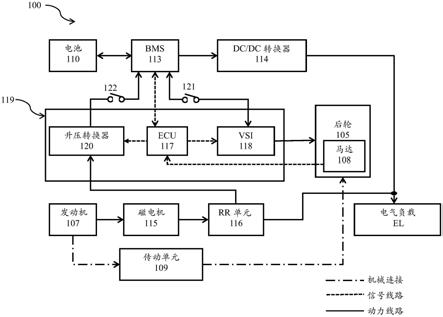
43.参考图2,示出了车辆(100)的框图。图2主要描绘了现有的推进系统、电气负载el的现有的动力供应机构、以及现有的电池充电机构。
44.推进系统在混合动力类型的车辆(100)中包括多种推进模式。推进模式主要包括基于发动机的推进和基于马达的推进。在基于发动机的推进中,发动机(107)与传动系统(109)联接,传动系统(109)进一步与后轮(105)联接。在基于马达的推进中,马达(108)与后轮(105)联接。马达(108)通常安装在后轮(105)上;然而,马达(108)的位置可以基于车辆的包装而变化。
45.电气负载el的动力供应机构包括基于电池的供应和基于发动机的供应。基于电池的供应包括电池(110)、电池管理系统(以下称为bms)(113)和dc/dc转换器(114)。bms(113)通信地连接到电池(110),使得bms(113)控制并调节充电期间流向电池(110)的动力以及放电期间从电池(110)流出的动力。dc/dc转换器(114)通过bms(113)连接到电池(110),以接收从电池(110)流出的动力。dc/dc转换器(114)将动力传递到电气负载el。基于发动机的供应包括发动机(107)、磁电机(115)、以及整流器和调节器单元(以下称为rr单元)(116)。发动机(107)驱动磁电机(115),从而产生电力。所产生的电力由rr单元(116)接收。rr单元(116)调节接收到的电力并将其传递到电气负载el。
46.现有的电池充电机构包括电子控制单元(以下称为ecu)(117)、电压源逆变器(以下称为vsi)(118)和bms(113)。ecu(117)指示bms(113)控制电池(110)通过vsi(118)充电,ecu(117)基于此来接收马达(108)的每分数转数(rpm)计数或实时速度。vsi(118)通信地连接到马达(108)和bms(113),以将电池(110)的电力发送到马达(108)用于起动马达(108),并接收由马达(108)产生的反电动势以给电池(110)充电。
47.鉴于图2参考图3,流程图的步骤301至步骤305在以下描述中描述了现有的充电机构。ecu(117)通过速度传感器(未示出)接收描绘实时马达速度(s
rt
)的每分钟转数(rpm)计数。速度传感器(未示出)可以安装在后轮(105)上。在不同的实施例中,ecu(117)可以使用任何已知的装置接收每分钟转数(rpm)计数。速度传感器(未示出)和任何其它已知的装置可以安装在车辆(100)的任何位置。
48.在现有的充电机构中,ecu(117)设置有预限定最大马达速度(s
max
),低于该最大马达速度(s
max
),电池110可以使用马达108产生的反电动势安全充电。ecu(117)将实时马达速度(s
rt
)与预限定最大马达速度(s
max
)进行比较。如果实时马达速度(s
rt
)保持小于预限定最大马达速度(s
max
),则ecu(117)向bms(113)发送激活信号,以允许通过vsi(118)对电池(110)充电。vsi(118)接收由马达(108)产生的反电动势,并向bms(113)提供合适的动力,以给电池(110)充电。
49.如果实时马达速度(s
rt
)达到超过预限定最大马达速度(s
max
),则ecu(117)指示bms(113)断开与vsi(118)的连接,以在不可控的电流在由于马达(108)产生的非常高的反电动势而以高实时马达速度(s
rt
)流过vsi(118)时保护电池(110)。
50.另外,如果实时马达速度(s
rt
)小于预限定最小马达速度(s
min
),诸如预空转速度或制动状况,则由马达(110)产生的反电动势不足以给电池(110)充电。从而,在超过预限定最大马达速度的马达速度下以及在预空转速度或制动状况下不能给电池(110)充电,这可能导致车辆(100)的深度放电状况。
51.此外,在深度放电状况下,电池(110)不能通过起动车辆(100)来充电,并且需要外
部充电机构(步骤307)。所述外部充电机构可以使深度放电电池恢复,所述外部充电机构主要在服务站可用。因此,用户需要去服务站解决深度放电问题。
52.本主题为上述缺点提供了解决方案。图4提供了常规车辆(100)的框图,常规车辆(100)包括现有的推进系统、电气负载el的现有的动力供应机构和新的电池充电系统。在上面的图2的描述中解释了所示推进系统和动力供应机构。
53.电池充电系统包括电池(110)、电池管理系统(113)和支持单元(119)。电池(110)通信地连接到电池管理系统(113)。电池管理系统(113)通信地连接到支持单元(119)。支持单元(119)还连接到在基于发动机的动力供应中使用的rr单元(116),使得rr单元(116)在需要时向支持单元(119)供应电力用于给电池充电。在所要求保护的电池充电系统中,使用支持单元(119)通过升压转换器充电模式和电压源逆变器(以下称为vsi)充电模式给电池(110)充电。
54.支持单元(119)包括ecu(117)、vsi(118)和升压转换器(120)。ecu(117)可通信地连接到bms(113)、vsi(118)和升压转换器(120)。ecu(117)设置有预限定马达速度常数(s)和电池(110)的预限定充电状态值(soc)。预限定马达速度常数(s)限定了马达速度带。马达速度带包括较高带值(s
hv
)和较低带值(s
lv
)。较高带值(s
hv
)限定了马达(108)的最大速度或最高速度,在高达该最大速度或最高速度的速度下电池(110)可以使用运用由马达(108)产生的反电动势的vsi(118)安全地充电。较低带值(以下称为s
lv
)限定了马达(108)的最小速度或预空转速度,只有在超过该速度的速度下,马达(108)才能产生足够的反电动势,从而vsi(118)可以给电池(110)充电。
55.电池(110)的预限定充电状态值(soc)包括电池(110)的最小充电状态值(soc
min
)和最大充电状态值(soc
max
)。最小充电状态(soc
min
)限定了电池(110)中所需的最小充电动力,低于该最小充电动力,电池(110)将处于深度放电状态。最大充电状态值(soc
max
)限定了电池(110)的最大充电动力容量,超过该容量,不能给电池(110)充电。
56.支持单元(119)的ecu(117)为bms(113)产生一个或多个命令信号,以调节电池(110)的充电模式。ecu(117)基于实时马达速度s
rt
和实时电池充电状态(soc
rt
)产生命令信号。命令信号可以包括第一激活信号和第二激活信号,第一激活信号限定用于激活vsi充电模式的激活命令,第二激活信号限定用于激活升压转换器充电模式的激活命令。
57.支持单元(119)的vsi(118)可通信地连接到ecu(117)、bms(113)和马达(108),以将电池(110)动力发送到马达(108)用于起动马达(108),并接收由马达(108)产生的反电动势以给电池(110)充电。vsi(118)使用反电动势提供动力,并且基于由ecu(117)产生的命令信号将动力传递到电池(110)。第一开关(121)完成动力流动的电路,vsi(118)通过第一开关(121)连接到bms(113)。在接收到产生的命令信号时,bms(113)运行第一开关(121)以控制电池充电模式。例如,在产生第一激活信号时,bms(113)闭合第一开关(121)以使动力能够从vsi(118)流向电池(110),从而启用vsi充电模式。另外,在产生第二信号时,bms(113)打开第一开关(121)以断开电路并停止从vsi(118)到电池(110)的动力流动,以便使不可控电流停止流过vsi(118)电路从而保护电池(110)。
58.支持单元(119)的升压转换器(120)可通信地连接到ecu(117)和bms(113)。升压转换器(120)通过第二开关(122)连接到bms(113)。在本实施例中,vsi(118)和升压转换器(120)分别通过第一开关(121)和第二开关(122)连接到bms(113);然而,第一开关(121)和
第二开关(122)可以包括任何其它已知的连接装置。
59.另外,升压转换器(120)连接到rr单元(116)以从rr单元(116)接收动力。升压转换器(120)由rr单元(116)提供动力,并且在升压转换器充电模式期间将接收到的动力传递到bms(113)用于给电池(110)充电。在深度放电的情况下,升压转换器(120)最初由rr单元(116)提供动力并激活。升压转换器(120)然后通过bms(113)将接收到的动力供应给电池(110)。当ecu(117)产生第二激活信号时,车辆管理系统(113)打开第一开关(121)并断开vsi充电模式。bms(113)然后闭合第二开关(122)以完成升压转换器(120)电路,从而激活升压转换器充电模式。来自升压转换器(120)的动力通过bms(113)流到电池(110)以给电池(110)充电。
60.鉴于图4参考图5a和图5b,流程图的步骤501至步骤510将本主题的电池充电系统的操作细节描述为如下。在运行中,ecu(117)通过bms(113)接收电池(110)的实时充电状态。ecu(117)还通过速度传感器(未示出)或任何其它已知的传感装置接收实时马达速度(s
rt
)。ecu(117)将电池(110)的实时充电状态(soc
rt
)与预限定最小充电状态值(soc
min
)进行比较。在实时充电状态(soc
rt
)小于预限定最小充电状态值(soc
min
)的情况下,ecu(117)产生第二激活信号。在产生第二激活信号时,bms(113)打开第一开关(121)并闭合第二开关(122)以启动/激活升压转换器充电模式。
61.在另一种情况下,如步骤507中所描绘的,当实时充电状态(soc
rt
)大于等于预限定最小充电状态值(soc
min
)时,电子控制单元(117)将接收到的实时马达速度(s
rt
)与预定马达速度常数/马达速度带(s)进行比较。如果实时马达速度(s
rt
)不存在于较低带值(s
lv
)与较高带值(s
hv
)之间或者存在于较低带值(s
lv
)和较高带值(s
hv
)之外,则ecu(117)产生第二激活信号。在产生第二激活信号时,bms(13)启动/激活升压转换器充电模式。此外,在步骤507,在实时马达速度(s
rt
)存在于较低带值(s
lv
)与较高带值(s
hv
)之间或之内的情况下,ecu(117)产生第一激活信号。在步骤508产生第一激活信号时,bms(113)打开第二开关(122)并闭合第一开关(121)以完成vsi(118)充电电路,并激活/启动vsi充电模式。
62.此外,电子控制单元(117)再次将实时马达速度(s
rt
)与预限定马达速度常数/马达速度带(s)进行比较(返回到步骤507),并产生第一激活信号和第二激活信号,如上所述。
63.另外,如步骤(510)所示,ecu(117)将实时充电状态(soc
rt
)与预限定最大充电状态值(soc
max
)进行比较。在实时充电状态(soc
rt
)大于等于预限定最大充电状态值(soc
max
)的情况下,在接收到来自ecu(117)的命令后,bms(113)停用所有充电模式并停止电池充电以保护电池(110)。在另一种情况下,在步骤???当实时充电状态(soc
rt
)小于预限定最大充电状态值(soc
max
)时,ecu(117)再次将实时马达速度(s
rt
)与预限定马达速度常数/马达速度带进行比较,并产生第一激活信号和第二激活信号,如上所述。上述对电池(110)充电的过程或方法继续进行,直到车辆(100)保持开启。
64.鉴于图5参考图6和图7,解释了针对电池(110)的实时充电状态(soc
rt
)和实时马达速度(s
rt
)的不同值而启用升压转换器充电模式和vsi充电模式。在深度放电状态下,一旦起动车辆(100),由发电机产生的动力通过rr单元(116)供应到升压转换器(120),以满足对升压转换器(120)的基本动力供应。如图6所示,保持激活升压转换器充电模式,直到电池110的实时充电状态值(soc
rt
)达到电池110的预限定最小充电状态值(soc
min
)。
65.如图7所示,一旦电池(110)的实时充电状态值(soc
rt
)大于电池(110)的预限定最
小充电状态值(soc
min
),如果实时马达速度(s
rt
)小于较低带值(s
lv
),则保持激活升压转换器充电模式。一旦实时马达速度(s
rt
)大于较低带值(s
lv
)并保持小于较高带值(s
hv
),就激活电池110的vsi充电模式。此外,如果实时马达速度(s
rt
)大于较高带值(s
hv
),则停用vsi充电模式并且激活升压转换器充电模式用于给电池(110)充电。
66.在一个实施例中,实时马达速度(s
rt
)可以对应于任何混合动力车辆中的实时车辆速度。例如,在基于马达的推进中,实时马达速度(s
rt
)对应于马达的速度,而在具有轮毂安装马达配置的基于发动机的推进中,实时马达速度(s
rt
)对应于车辆(100)的速度。然而,在另一个实施例中,其中马达(108)安装在车辆(100)的底盘上,实时马达速度(s
rt
)仅对应于马达(108)的速度。此外,本主题的各方面不限于本文使用的车辆。
67.应当理解,实施例的各方面不一定限制于本文描述的特征。根据以上公开,本主题的许多修改和变化是可能的。因此,在本主题的权利要求书的范围内,本公开可以以不同于具体描述的方式实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。