1.本发明涉及城市路网交通状态计算技术领域,具体为一种以径向基网络为核心的曲面拟合算法。
背景技术:
2.近年来,随着中国城市化进程的加快,大中城市机动车数量直线上升,拥堵已成为城市发展所必须面临的难题。据统计,全国大约有三分之二的城市,其主干道在早晚高峰会呈现不同程度的拥堵现象。就目前看来,智能交通系统(intelligent traffic system,its)是解决道路拥堵问题的最常用工具。其将数据的采集、传输、分析等技术集成于一身,充分挖掘已有的交通信息,为缓解交通拥堵、规划出行路线、车辆调度等问题提供了有力的保障。目前its的数据采集技术覆盖范围受到限制,使得到的交通数据不尽完善。近几年,随着浮动车(具有车载gps设备的公交汽车和出租车等)的推行和智能手机的普及,gps技术在its中得到了广泛使用。
3.目前,已经国内外已经有大量的文献对浮动车技术做出了丰富的研究工作。然而,大部分研究的数据基础是高频gps数据。但实际中,由于硬件条件和投资成本等问题,利用浮动车来进行低频采样更为普遍,这里面以出租车系统为主要代表,因而如何将这些数据进行有效地信息挖掘是一个值得研究的问题。目前,对道路平均速度的求解是计算道路交通状态的主要手段。短时(5min
‑
15min)道路交通状态计算可以为使用者提供实时的道路检测结果,提升用户体验,一般计算时间不超过15分钟。但计算周期越短,交通状态就具有更强的随机性,这就使得短时道路交通状态计算相比于以往的浮动车技术在道路匹配技术和道路交通状态计算方法上提出了更高的挑战。
技术实现要素:
4.为了克服现有技术方案的不足,本发明提供一种以径向基网络为核心的曲面拟合算法,能有效的解决背景技术提出的问题。
5.本发明解决其技术问题所采用的技术方案是:
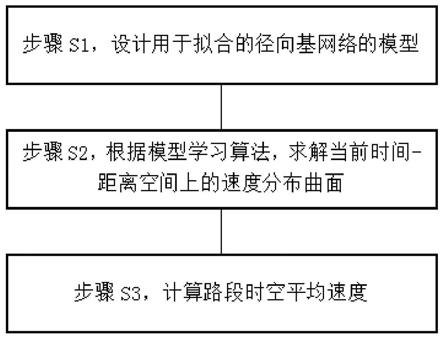
6.一种以径向基网络为核心的曲面拟合算法,其特征在于,包括以下步骤:
7.步骤s1,设计用于拟合的径向基网络的模型,设计具有n
‑
m
‑
s结构的网络模型,即网络模型具有n个输入,m个隐层节点,s个输出,将时间、距离组成的二维向量作为输入矢量,根据时间段内出租车gps的个数求出对应的速度标量,最后根据径向基网络分布的函数拟合曲面;
8.步骤s2,根据模型学习算法,求解当前时间
‑
距离空间上的速度分布曲面,主要包括有中心点的确定、径向基网络宽度的确定和权值修正算法三个方面;
9.步骤s3,计算路段时空平均速度,主要根据时间和空间两个维度结合计算。
10.进一步地,在步骤s1中,径向基网络分布的函数为:
[0011][0012][0013]
其中,φ(
·
)为径向基函数,||x
‑
c
j
||为欧式距离,c
j
(c
j
∈r
r
)为径向基网络的中心,为径向基网络半径。
[0014]
进一步地,在步骤s2中,求解当前时间
‑
距离空间上的速度分布曲面主要包括三个方面:
[0015]
(1)中心点的确定,径向基网络中心选取是成功用于实际的关键,常用确定径向基函数中心的选取算法有:随机算法选取径向基网络中心、聚类学习选取径向基网络中心与固定径向基网络中心点,中心点根据路段长度、计算时间间隔自适应的计算径向基网络中心点,使径向基网络中心点均匀分布在时空平面上;
[0016]
(2)径向基网络宽度的确定,有固定值法和平均距离法,在本方案选择固定值法作为网络宽度确定算法,径向基网络宽度可由确定,其中l是所有中心之间的欧式最大距离,m为径向基网络中心的数目;
[0017]
(3)权值修正算法,采用梯度下降算法修正权值,由于中心点与道路自适应,每次迭代只需要调整权重。
[0018]
进一步地,在步骤s3中,平均速度的计算,主要从时间和空间两个维度的计算,时空平均速度计算如下:
[0019][0020]
其中,为曲面拟合算法最终计算的路段时空平均速度。
[0021]
与现有技术相比,本发明的有益效果是:
[0022]
本发明将研究对象限定到路段上,充分利用了车流速度在路段上的时空分布规律,通过建模的方法,利用离散采样点逼近真实的速度分布,使之更适应城市路网交通状态计算,并利用实验加以分析论证,针对了现有的针对现有交通状态计算方法,在短时交通问题突发时计算不准确泛化能力不强的缺点,对算法进行改进,使其具有更强的鲁棒性。
附图说明
[0023]
图1为本发明径向基网络模型示意图;
[0024]
图2为本发明中心函数位置示意图;
[0025]
图3为本发明与其它算法比较示意图;
[0026]
图4为本发明拟合结果与真实对比示意图;
[0027]
图5为本发明步骤流程示意图;
[0028]
图6为本发明采样点在时间
‑
距离空间的分布示意图;
[0029]
图7为本发明摄像捕捉场景示意图。
具体实施方式
[0030]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0031]
本实施例中,经过地图地图匹配算法,每个路段都会对应一系列的gps数据。如何利用这些采样点信息还原出路网中每个路段的交通状态就成为了下一步要解决的重要问题,而研究对象也由gps数据转而为城市路网中所包含的全部路段。在前人的工作基础中基于函数拟合的方法与车辆追踪的方法在交通状态计算问题上表现了良好的性能。
[0032]
车辆追踪的方法在道路速度计算过程当中充分考虑路网拓扑状态、信号灯控制等因素等条件。因此大部分车辆追踪算法体现了良好的准确率。但是对于北京市来说,五环以内主干路网由几万条路段组成,这种情况下要满足短时计算的需求,车辆追踪的方法计算开销过于庞大难以胜任。相反基于函数拟合的方法计算时间短但仍能获得足够的准确率。过往定义了一个虚拟的物理量——路段时空平均速度,用来代替交通流、旅行时间或者其他标量,用于表示路段的交通状态。2013年,提出的曲面拟合算法与基于最短路径搜索的车辆追踪算法,在城市路网基础上进行了大量的实验,比较短时状态下交通状态评估的准确率。实验表明,曲面拟合算法在短时大规模城市路网交通状态计算中表现出了很强的优势。但是该算法所采用的曲面拟合函数为三次曲面函数,在计算过程中极易出现过拟合现象,虽然通过实验结果根据每条道路采样点数量舍弃了三次函数中的一些函数项,但是不具有泛化能力。同时该算法易受短时突发状况影响,导致数值不准确。
[0033]
因此,我们在此工作基础上,提出了一种以径向基网络(rbfnn)为核心的曲面拟合算法,用于计算城市路网的交通状态。算法将研究对象限定到路段上,充分利用了车流速度在路段上的时空分布规律,通过建模的方法,利用离散采样点逼近真实的速度分布,使之更适应城市路网交通状态计算,并利用实验加以分析论证。
[0034]
经研究在单个路段内部,车流则呈现出较强的连续性质。从时间角度讲,道路在白天的交通状况比较复杂,在早晚高峰道路的速度比较低,在非高峰时段道路速度会变的比较高,在晚上道路的车速一般较高。车辆的速度变化受客观规律的影响,车辆骤起骤停也是加速度的快速变化,在速度分布上具有连续性且保持光滑。从空间角度讲,路段上车辆在上游入口处以及下游出口处由于受到交通信号灯的影响,平均速度较低车辆在道路入口和出口处受到交通信号的影响速度较低,在路段中部车速平稳且较高。因此,我们可以根据车流在时间以及空间上表现出的特点,利用机器学习中回归分析的思想,将抽象的路段速度放置在由时间、空间和速度三个维度的三维空间内。使用曲面拟合的方式,回归得到速度与每一时刻路段上不同位置的分布状态,最终形成线性的三维曲面。对线性曲面进行积分求平均值,计算路段时空平均速度。将复杂的路段平均速度求解问题转化为求解合乎逻辑的曲面问题,简化了计算难度。
[0035]
为此,需将同一路段的采样点进一步处理,将每个采样点的时间和空间数据配合
路段的经纬度坐标,转变为进入路段的时间和距离路段入口的距离这个两个特征属性,并根据这个二维向量构建路段的时间
‑
距离空间,如图6所示的是一天中所有采样点在此空间中的分布情况。
[0036]
过往提出用三次函数拟合曲面作为车辆的速度分布模型。曲面拟合的函数表达式如下:
[0037][0038]
之后利用最小二乘法求解函数表达式中的系数:
[0039][0040]
基于三次函数的曲面拟合算法在面对道路长度较短,道路通行状态单一的路段有较好的拟合效果。但是由于函数本身表达能力的限制,在路段较长,或者路段变化较为复杂的情况下难以做到有效的拟合。同时在面临采样点较少的情况下曲面函数容易过拟合。防止过拟合势必要根据实验结果削减多项式中的项数,但是根据实验得来的削减后的公式难以满足所有道路的情况。若使用rbf神经网络(radical basis function neural networks,rbfnn)替换原有的拟合函数,将很好的解决了这一难题。将用使用rbfnn模型代替原有的三次函数,以增强曲面拟合算法在交通状态求解问题上的鲁棒性。
[0041]
如图1
‑
5所示,本发明提供了一种以径向基网络为核心的曲面拟合算法,包括以下步骤:步骤s1,设计用于拟合的径向基网络的模型;步骤s2,求解当前时间
‑
距离空间上的速度分布曲面;步骤s3,计算路段时空平均速度。
[0042]
在步骤s1中,过往已经详细介绍了径向基神经网络的模型结构,网络是由moondy和darken于20世纪80年代末提出的一种具有单一隐藏层的三层前馈网络。rbfnn广泛应用于众多领域,主要基于以下优点:(1)表示形式简单,即使对于多变量输入也不增加太多的复杂性。(2)径向对称。(3)光滑性好,任意阶导数均存在。(4)由于该基函数表示简单且解析性好,因而便于理论分析。原空间的线性不可分模式经过隐藏层处理后,变换至新的高维空间,成为线性可分,由输出层实现线性分类。径向基函数有高斯函数、多二次函数、逆多二次函数与薄板样条函数等,它们均具有良好的逼近能力。根据其优点完全可以替换原有算法中的拟合函数。本方案设计具有n
‑
m
‑
s结构的网络模型,即网络模型具有n个输入,m个隐层节点,s个输出,将时间、距离组成的二维向量作为输入矢量,若该时间段内某路段出租车gps数据共有i个,则可表示为:x
i
=(t
i
,d
i)
,即网络中n取值2,如图1所示,根据时间段内出租车gps的个数求出对应的速度标量,输出层节点中的∑表示输出层神经元采用线性激活函数,m的取值由计算时间间隔和路段长度共同决定,{ω
j
:j=1,
…
,m}为输出权重矩阵,输出为所有中心点输出值加权和,即当前输入值x
i
所对应的速度标量v(网络中s取值为1),最后根据径向基网络分布的函数拟合曲面,径向基网络分布的函数为:
[0043][0044]
[0045]
其中,φ(
·
)为径向基函数,本方案采用高斯函数,||x
‑
c
j
||为欧式距离,c
j
(c
j
∈r
r
)为径向基网络的中心,为径向基网络半径,在拟合曲面时,我们将此中心函数均匀的分布在时空平面上,从路段入口处每100m放置一个中心函数,在空间尺度上每60s放置一个中心函数。即在对一个长度为800m,5min内的平均速度计算时需要54个中心函数位置如图2所示。
[0046]
对于所有路段,以此时间空间间隔为基准的基于径向基网络的拟合曲面均有良好的拟合效果,原有算法在实验过程中需要依据每一条路段的采样点数量增减原有三次函数中的函数项,而改进的径向基网络曲面拟合算法,只要根据路段长度、计算时间间隔,对应生成响应的径向基网络中心点,则在此路段将会呈现良好的曲面拟合效果,泛化能力显著。
[0047]
在步骤s2中,根据模型学习算法,求解当前时间
‑
距离空间上的速度分布曲面主要包括三个方面:
[0048]
(1)中心点的确定,径向基网络中心选取是成功用于实际的关键,常用确定径向基函数中心的选取算法有:随机算法选取径向基网络中心、聚类学习选取径向基网络中心与固定径向基网络中心点,中心点根据路段长度、计算时间间隔自适应的计算径向基网络中心点,使径向基网络中心点均匀分布在时空平面上;
[0049]
(2)径向基网络宽度的确定,有固定值法和平均距离法,在本方案选择固定值法作为网络宽度确定算法,径向基网络宽度可由确定,其中l是所有中心之间的欧式最大距离,m为径向基网络中心的数目;
[0050]
(3)权值修正算法,采用梯度下降算法修正权值,由于中心点与道路自适应,每次迭代只需要调整权重,本方案采用梯度下降算法修正权值,记e
i
为第i个样本训练时的误差信号,v
i
为样本对应的瞬时速度,假设中心函数的数目为m,公式表示为:
[0051][0052]
为使目标函数最小化,参数的修正量应与其负梯度成正比,即:
[0053][0054]
具体的计算式为:
[0055][0056]
上述目标函数是所有训练样本引起的误差总和,导出的参数修正公式是一种批处理式调整,当误差精度满足要求时,训练完成。
[0057]
在步骤s3中,平均速度的计算,主要从时间和空间两个维度的计算,时空平均速度计算如下:
[0058]
[0059]
其中,为曲面拟合算法最终计算的路段时空平均速度,该算法从实际的道路时空连续性角度出发,计算道路的时空平均速度具有较高的准确性和鲁棒性。
[0060]
下面结合基于径向基网络的曲面拟合算法与其他算法的比较来说明,这里我们选取机场高速附近的路段作为研究对象,计算九点到九点半每五分钟的路段平均速度,计算方法为计算采样点速度平均值,基于三次函数的曲面拟合交通状态计算方法,基于径向基网络的曲面拟合交通状态计算方法,实验结果如图3所示。该路段采样点分布较为均匀,且道路等级较高,早高峰时较为通畅,但是能够反应城市道路的一般状态。从图中计算结果我们可以看出,不同算法之间的结果存在一定的误差,但是也都能够基本反映出路段平均速度的变化趋势。
[0061]
从数据库中选取在2013年2月6日7点到7点5分的早高峰时段,针对一条路段的68个采样点进行曲面拟合操作。可以看出来rbfnn曲面拟合算法的曲面表现能力更加的丰富,而且两者都体现了该路段交通流的特征。该时刻计算结果如下表所示:
[0062][0063]
结果显示三次曲面拟合与rbfnn曲面拟合均在道路通畅的路段表现了良好的性能。之后我们模拟路段因为突发情况瘫痪一分钟,我们将上个试验中一分钟内所有的采样点的速度值设置为0,以此模拟路段在突发状况下发生交通瘫痪,但又马上恢复了正常通行。
[0064]
重新进行曲面拟合,可以观察到由于一分钟的瘫痪原因,0值的采样点已经影响了周围采样点。而rbfnn曲面拟合算法的容错能力更好,0值采样点完全没有影响周围道路状态的拟合效果,计算结果如下图所示:
[0065][0066]
由此可见,rbf对于短时突发的交通问题处理能力更好,鲁棒性更强。
[0067]
虽然在与其他算法的比较过程中呈现了相似的性能,获取真实的路段状况依旧是十分重要的。它可以帮助我们进一步验证算法的精确性,为此我们在一条单行道上设置了如下图7所示的实验场景。利用摄像机捕捉画面中的车辆,跟踪并计算同一辆车在不同摄像机中的瞬时速度。四台摄像机在捕捉同一辆出租车的情况分别为t0,t1,t2,t3位置的摄像机所拍摄的内容。
[0068]
为计算每个摄像机所捕捉车辆的瞬时速度,我们采取如下方法,以摄像点t0位置所拍摄的视频数据为例。我们在双向路中间的栅栏上系上红丝带作为标记,记录车辆穿越前后两个标志物的时间t0’
以及t
0”,两标志物之间的间隔为9米。摄像机的位置处于两个标志物之间,每台摄像机之间的间隔为60米,即我们监控了此单行路段的240米范围作为实验路段,我们的拍摄时间为16:00到16:30。我们将t0’
以及t
0”的平均值记为t0,以此我们也可以得到t1,t2,t3和与之对应的瞬时速度v0,v1,v2,v3。也就是说每一经过这一侧单行路段的车辆我们都可以得到4个采样点。这里车辆真实旅行时间为t3‑
t0,旅行距离为180m,则可知单独车辆平均速度。将5min以内的所有记录的瞬时速度求平均值值,即为该时段内路段的真实速度。我们将在四台摄像机中同时出现,且可以清晰辨别外貌的车辆作为浮动车,共得到多条数据,按照如下格式进行记录。
[0069][0070]
经过径向基网络曲面拟合算法测试的结果,与真实值之间的对比结果如图4所示,从图中计算结果我们可以看出,径向基网络拟合算法与实际数据存一些误差,但是变化趋势基本一致,具有良好的实验效果,证明了我们的算法有较高的准确性。
[0071]
针对路段速度在时间空间层面表现出的分布规律性,引入曲面拟合的思想,求解路段的时空平均值。然后根据原有的三次曲面拟合算法,提出了改进的基于rbfnn的曲面拟合算法。在试验中,将主要的研究对象锁定为单向路段,通过与其他算法比较验证了算法的可行性。通过极端数据的检验,验证了该算法的鲁棒性。最后与摄像机拍摄的实际道路速度进行比较,验证了rbfnn的曲面拟合算法的准确性。上述均能验证基于rbfnn的曲面拟合算法在计算道路交通状态上的良好性能。
[0072]
与传统技术相比,本技术方案将研究对象限定到路段上,充分利用了车流速度在路段上的时空分布规律,通过建模的方法,利用离散采样点逼近真实的速度分布,使之更适应城市路网交通状态计算,并利用实验加以分析论证,针对了现有的针对现有交通状态计算方法,在短时交通问题突发时计算不准确泛化能力不强的缺点,对算法进行改进,使其具有更强的鲁棒性。
[0073]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

