1.本发明涉及射频电源调谐技术领域,尤其是一种射频电源的调谐方法。
背景技术:
2.射频电源可广泛应用于镀膜、半导体制备等领域,例如用于半导体等离子刻蚀。然而,在等离子刻蚀过程中,因为工艺要求的变化,通常会改变射频电源输出功率、气体成分、气流流量等。随着这些参量的变化,负载阻抗也将动态变化,要求射频电源在整个过程中可实现快速响应和最大化功率传输。
3.一般频率调谐方法,多采用梯度法频率调谐。以反射功率或反射系数绝对值作为参考值,因该值为标量的原因,频率调谐方向不确定,通常以调制至反射功率最小或反射系数最小为目标,频率调谐所用时间以毫秒计,不能达到快速化频率调谐控制要求。
4.目前已经有现有技术致力于寻找能够快速调谐的方法与装置,例如申请号为2017800311002的中国专利,其公开了一种在复合反射系数平面生成阻抗曲线与参考矢量,根据参考矢量与实际测量的阻抗值之间的测量角度、以预定倍数缩放测量角度来计算频率调节步长,根据频率步长对激励器的频率进行调节。此外,该方法仅考虑到了对理想阻抗轨迹曲线(目标曲线)的频率调节,如图1所示,若实际形成的阻抗曲线为非目标曲线中的闭合曲线,此时同一个测量角度可能对应曲线上的两个阻抗点n1与n2,两个阻抗点的出现将导致频率调谐方向错乱的问题,按照该申请所记载的调节方式,频点n1与频点n2都将往频率减小的方向移动;此时,频点n2在调节过程中会移动到最小频率点,而不能调至到频率调谐最优点。
技术实现要素:
5.本发明的目的在于克服现有技术中所存在的仅考虑到了对理想阻抗轨迹曲线的频率调节,在阻抗曲线为非目标曲线时同一个测量角度会对应两个阻抗点,由此无法调至频率最优点的问题,提供一种射频电源的调谐方法,能够根据实测阻抗值与参考矢量的空间相对位置关系实现对射频电源频率的快速跟踪调节。
6.为了实现上述发明目的,本发明提供了以下技术方案:一种射频电源的调谐方法,其中射频电源包括频率控制模块、闭环控制器,包括:改变射频电源频率,在复数平面中建立相应的曲线;以复数平面中任意一点作为起点,以复数平面的原点或原点附近的一点为终点,并以起点和终点作参考矢量;判断曲线是否为目标曲线,若不是目标曲线,则通过曲线变换得到修正曲线;所述参考矢量将目标曲线或修正曲线分成左右区域;根据目标曲线或修正曲线上的复数值处于左右区域的位置调节射频电源的频率。
7.其中,在曲线的首端与尾端的连线上取一参考点,连接至原点形成参考线,曲线与参考线或其延长线有且只有一个交点的曲线为目标曲线,反之则为非目标曲线。
8.根据一种具体的实施方式,上述射频电源的调谐方法中,所述曲线变换,包括:基于参考矢量将非目标曲线分成两段,通过函数变换分别将两段曲线向左、向右变换得到位于参考矢量两侧的修正曲线;或者是通过函数变换将其中一段曲线向左或向右变换得到位于参考矢量两侧的修正曲线。
9.根据一种具体的实施方式,上述射频电源的调谐方法中,所述目标曲线或修正曲线上的复数值处于参考矢量的左侧区域时,增大或减小射频电源的频率,当目标曲线或修正曲线上的复数值处于参考矢量的右侧区域时,与处于左侧区域时的调节相反。
10.根据一种具体的实施方式,上述射频电源的调谐方法中,所述起点位于目标曲线或修正曲线的首尾连线上,或者是首尾连线的延长线上,或者是首尾连线或其延长线的一侧。
11.根据一种具体的实施方式,上述射频电源的调谐方法中,所述原点附近的一点为反射系数模值小于等于0.5,或射频电源传输效率大于等于75%的区域内一点。
12.根据一种具体的实施方式,上述射频电源的调谐方法中,所述函数变换采用矩阵或转置矩阵,阻抗为z,所述修正曲线为为,所述转置矩阵为,所述 ,其中,为变换角度。
13.其中,变换角度的大小能够决定修正曲线离参考矢量的的距离大小,角度越大,开口越大,可以根据待变换的非目标曲线的开口大小进行设定。
14.根据一种具体的实施方式,上述射频电源的调谐方法中,所述目标曲线或修正曲线上取任意复数点 , ,参考矢量为: ,使用 与构造行列式:其中,为复数点的横坐标,复数点的纵坐标;为参考矢量的横坐标,为参考矢量的纵坐标;当t>0时,通过频率控制模块增大射频电源的频率;当t<0时,通过频率控制模块减小射频电源的频率。
15.根据一种具体的实施方式,上述射频电源的调谐方法中,运用闭环控制器和频率控制模块对射频电源的频率进行跟踪调节。
16.根据一种具体的实施方式,上述射频电源的调谐方法中,所述曲线包括阻抗曲线或导纳曲线,或反射系数曲线。
17.与现有技术相比,本发明的有益效果:本发明所提供的射频电源调谐方法,通过在复数平面中建立响应于射频电源频率的曲线,并判断所得曲线是否为目标曲线,对非目标曲线进行曲线变换得到修正曲线;同时确定能够用于将目标曲线或修正曲线分成左右区域的参考矢量,最后只需根据实际测得复数值位于参考矢量所划分的左右区域的位置即可确定频率调节方式,计算方式简单高效,能够进行射频电源的跟踪调节。并且本方法能够克服现有技术无法对非目标曲线进行频率
调节的缺陷,同时适用于目标曲线与非目标曲线的频率调节,具有更强的适应性。
18.附图说明:图1为本发明示例性实施例的非目标曲线1;图2为本发明示例性实施例的射频电源系统结构框图;图3为本发明示例性实施例的目标曲线;图4为本发明示例性实施例的非目标曲线2和其变换示意图;图5为本发明示例性实施例的非目标曲线1的曲线变换示意图。
具体实施方式
19.下面结合试验例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
20.实施例1图2示出了本发明示例性实施例的射频电源系统,包括:射频电源、同轴线、匹配器、负载腔体。通过同轴线将射频电源输出接口与匹配器输入接口相连接,匹配器输出接口连接负载腔体。其中射频电源内部具有对输出射频信号检测的传感器、可进行频率调谐的频率控制模块,频率控制模块还配置有闭环控制器(图2中未示出)。进一步的,射频电源通过以下调谐方法进行频率跟踪调节,包括:a、通过改变射频电源频率,在复数平面内建立相应的曲线,所述曲线包括:由射频电源输出端口看入的整体阻抗曲线或导纳曲线或复数反射系数曲线。其中,曲线上最小频率对应的复数点与最大频率对应的复数点构成曲线的首尾。
21.b、针对于获取到的曲线(整体阻抗曲线或导纳曲线或复数反射系数曲线),以复数平面中任意一点作为起点,以复数平面的原点或原点附近的一点为终点,并以起点和终点作参考矢量;所述参考矢量用于将已经获取到的曲线分成两个区域。
22.具体的,所述起点位于目标曲线或修正曲线的首尾连线上(如图5所示的a点),或者是首尾连线的延长线上(如图4所示的a点),或者是首尾连线或其延长线的一侧(如图3所示的a点);而所述原点附近的一点为:反射系数模值小于等于0.5,或射频电源传输效率大于等于75%的区域内一点(如图3所示的虚线区域)。
23.c、判断曲线是否为目标曲线,若不是目标曲线,则通过曲线变换得到修正曲线;所述参考矢量将目标曲线或修正曲线分成左右区域(其中左右区域,是基于曲线上的点与参考向量的空间左右关系确定的);根据目标曲线或修正曲线上的复数值处于左右区域的位置调节射频电源的频率。
24.具体的,在调节频率时,通过接收传感器的阻抗实测值(实测值是位于曲线上的一复数点),根据阻抗实测值与参考矢量的左右位置关系去确定频率调节方向,其中,左右两侧的频率调节方式相反,一个为增大,另一个为减小,由此实现对射频电源频率的快速跟踪调节。在建立相应的曲线的过程中,响应于射频电源频率所形成的曲线可能为目标曲线或非目标曲线。图3示出了本发明示例性实施例所得的目标曲线,图1、图4分别示出了响应于射频电源频率所形成的两种非目标曲线。对于非目标曲线,曲线上的点可能位于参考矢量的延长线上(如图1所示),曲线上的点与参考矢量存在共线的位置关系,导致无法确定曲线
上的复数点与参考矢量之间的左右位置关系,因此需要对目标曲线进行曲线变换,以得到修正曲线。
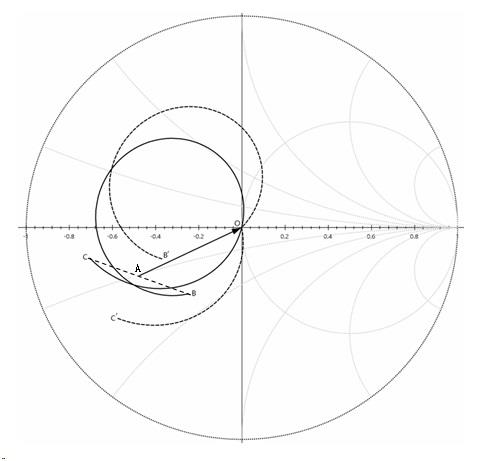
25.进一步的,上述曲线变换,包括:基于参考矢量的终点将非目标曲线分成两段,通过函数变换分别将两段曲线向左、向右变换得到位于参考矢量两侧的修正曲线;或者是通过函数变换将其中一段曲线向左或向右变换得到位于参考矢量两侧的修正曲线。其中,所述函数变换包括:构建变换矩阵,通过变换矩阵将两段曲线(如图5所示)或其中一段曲线(如图4所示)向左或向右变换,以得到位于参考矢量两侧的修正曲线。
26.图5示出了本发明示例性实施例的基于矩阵变换对非目标曲线1的曲线变换示意图。具体的,本实施例优选为曲线首尾(b点与c点)连线的中点a为起点,原点o为终点,得到参考矢量;其中,复数点b为整体阻抗曲线或导纳曲线或复数反射系数曲线上,最小频率对应的复数点;复数点c为整体阻抗曲线或导纳曲线或复数反射系数曲线上,最大频率对应的复数点。假设复数点b等于 ,复数点c等于 ,那么参考点a就可以通过(1)式计算得到: (1)将参考矢量分成的两部分bo、co分别做仿射变换,经处理后如图4中虚线所示,bo变换成 、co变换成 。
27.由仿射变换得到变换矩阵: (2)其中,z为输入阻抗(z也可用导纳或输入反射系数代替进行推导); 为z的转置矩阵; 为仿射变换后得到是阻抗曲线。当θ取负时,bo曲线整体向左变换,成为;当θ取正时,co曲线整体向右变换,成为,由此将非目标曲线boc转换为理想的修正曲线 。
28.在本发明进一步的实施例中,通过空间叉乘的方式计算目标曲线或修正曲线上的复数值处于参考矢量的左右区域中的哪个区域,在向量叉乘后,通过右手法则即可确定复数点与参考矢量的相对位置关系,位于参考矢量的左边区域还是右边区域,具体包括:当所得曲线boc为目标曲线时:设实际测得的阻抗点为 ,v
m
为整体阻抗曲线或导纳曲线或复数反射系数曲线上的任意复数点,即boc曲线上的任意复数点,参考矢量 等于: , 可通过式(1)计算得到。
29.使用 与 构造行列式即可计算得到叉乘数学结果t:(3)当所得曲线boc为非目标曲线时,实际测得阻抗值还是为原始目标曲线上的复数点v
m
,但是在修正曲线上有该点对应的矩阵变换映射点,为仿射变换后整体阻抗(导纳)曲线或复数反射系数曲线上的任意复数点(即曲线的任意复数点),此时,利用 与构造式(3)的行列式也可以确定与参考矢量的相对位置关系。
当t>0时,频率控制模块增大频率;当t<0时,频率控制模块减小频率;同时在频率控制模块中配置一个闭环控制器按照该规则进行频率跟踪调节,优选采用现有闭环控制器中的pid控制器,按照该控制原理控制频率快速变化,以将射频电源频率调节至t=0所对应的频率点。闭环控制器的误差输入即为t,闭环控制器的输出为频率调节量,由此实现对射频电源频率的快速跟踪调节。
30.同理,针对如图4所示的非目标曲线2,以曲线首尾(b点与c点)连线的延长线点a为起点,原点o为终点,作参考矢量。由于bo曲线位于参考矢量的左侧,只需将co曲线作仿射变换,使修正后的曲线 位于参考矢量的右侧,最终实现对射频电源频率的快速跟踪调节。
31.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。