1.本发明涉及自动驾驶环境感知领域,特别涉及一种汽车行驶环境感知方法。
背景技术:
2.对行车路况检测技术的研究,是减少交通事故发生的一个非常有效手段。行车路况的研究是对道路本身以及行驶在其上的车辆,行人进行分析的技术。对行驶在同一车道的车辆,障碍物或者其他交通标志的正确识别是整个系统性能测评的重要指标。根据学者们研究的结果表明,在每一个交通事故总是能够与驾驶员的操作不当、车辆和道路环境未能及时警惕而有关。由于在长时间行车途中,驾驶员们难免会有疲劳,放松的心态,这就要求汽车生产厂商们可以借助科技的发展来增强驾驶员对路况的感知能力与对潜在威胁的预测判断,部分甚至是完全代替驾驶员生产智能车辆。必然将会对世界的汽车产业有新的推动作用促进全球经济的发展,减少因交通事故而导致人员的伤亡。
3.基于计算机视觉的路况识别检测技术(包括车道线识别、交通标志识别、障碍物与车辆的识别等)则是车辆智能驾驶系统中的关键技术,也是对车辆智能化水平评价与衡量的一个重要标准。
技术实现要素:
4.本发明目的是在于提供一种汽车行驶环境感知方法,能够对汽车行驶环境进行有效的感知,提高车辆行驶过程中对车道线和车辆的识别精准度。
5.本发明提供的技术方案为:一种汽车行驶环境感知方法,包括如下步骤:步骤一:将任意尺寸的视频帧读入;步骤二:采用图像分割对行车视频中的视频帧进行简单的预处理操作,减少整个系统的运算量,提高系统的运行效率;步骤三:利用hough变换对车道线进行准确的识别,其中图像做hough变换识别车道线之前先进行sobel操作以进一步滤除非目标直线;步骤四:利用光流法对车辆进行准确的识别,在应用光流法后,系统得到一系列的点,通过聚类的方法将其分为多个不同的类别,再从中筛选出目标车辆,以达到最终效果。
6.进一步地,所述步骤一中的视频帧读入,为了方便处理视频帧并保证系统的实时性,可以跳帧读入视频帧,而不会对整个系统的结果有太大的影响。
7.进一步地,所述步骤二中的图像分割的方式为,用六边形圈出感兴趣的区域,其中用于车道线识别的六边形的垂直高度约占整幅图像的1/3高度,用于车辆识别的六边形的垂直高度约占整幅图像的1/2高度。
8.进一步地,所述步骤三中利用hough变换对车道线进行识别的具体步骤如下:(1)将rgb视频帧图像变成灰度图,便于处理与操作;(2)对图像进行分割,除去车道线之外的部分;(3)将分割后的图像结果进行阈值化;
(4)对图像做做闭运算,去除噪声点;(5)对图像做sobel算子操作,找到图像中的边缘部分;(6)对图像做hough变换检测出所有的直线;(7)对求出的直线做筛选去掉非车道线的直线与重复的直线得到最终结果。
9.进一步地,所述步骤四中应用光流法进行车辆识别的具体步骤如下:(1)rgb图像转灰度图像;(2)图像的分割;(3)应用光流法,求出运动的在特征点集;(4)将整个点集进行聚类;(5)筛选出目标点集;(6)结果表示与反馈。
10.更进一步地,所述光流法具体如下:(1)由于光流法需要两张图像做比较,因此为了避免重复读入视频,用缓冲区将两幅图像放进去;(2)由于光流法的应用金字塔l
‑
k算法,所以需要额外的空间存储图像金字塔,并且对图像进行见金字塔操作也是一个比较耗时的操作,所以可以采用数组来存储上一帧图像的金字塔结果,从而省去了对每帧图像都要两次金字塔操作的过程,最终使得光流法的时候有较高的效率;(3)由于采用稀疏光流法,因此需要找到图像的特征点集(即角点集合),并将其作为光流法所追踪像素点,并在光流法应用之后去除不合理的角点以提高运算的效率;(4)关于光流法函数的参数需要仔细推敲使用合适的值以达到最好的效果。
11.更进一步地,所述的点集聚类主要是采用系统聚类法。该聚类方法是基于中心点间距的聚类方法,该方法可以将相对集中的点聚集到一起。从而可以将由光流法的出来的点集进行处理,形成相对集中地一些点集合,最终标识出来整个车辆。根据试验与观察所得,当聚类数小于3或最短类间距离大于某一特定值时,则停止聚类,返回聚类结果。
12.更进一步地,所述的点集筛选主要是将非车辆的点集滤除掉,以求出最后的结果。利用步骤三所求出的车道线方程来作为车辆状况的判断标准,即聚类中心点不在在车道线范围以内的点集不作为车辆来标识。这样便可以滤除掉大部分误识别的点集,得到正确结果。需要注意的是车道线的识别不完全的情况。在这种情况下可以在一定时间内认为车道线的方程并没有发生变化,依旧采用上次算出来的结果,而超过这个时间点时则认为车道线方程不能作为约束条件。
13.本发明的有益效果:本发明提供了一种汽车行驶环境感知方法,首先将任意尺寸的视频帧读入系统;其次采用图像分割技术对行车视频中的视频帧进行简单的预处理操作,提取出感兴趣的区域,减少整个系统的运算量,提高系统的运行效率;再次,利用sobel算子对噪声点进行滤除,并利用hough变换对车道线进行准确的识别;最后利用光流法对车辆进行准确的识别。在应用光流法后,系统得到一系列的点,通过聚类的方法将其分为多个不同的类别,再从中筛选出目标车辆,以达到最终效果。本发明提供的汽车行驶环境感知方法,能够对汽车行驶环境进行有效的感知,提高车辆行驶过程中对车道线和车辆的识别精准度,从而有效提高自动驾驶系统的路况识别能力。
附图说明
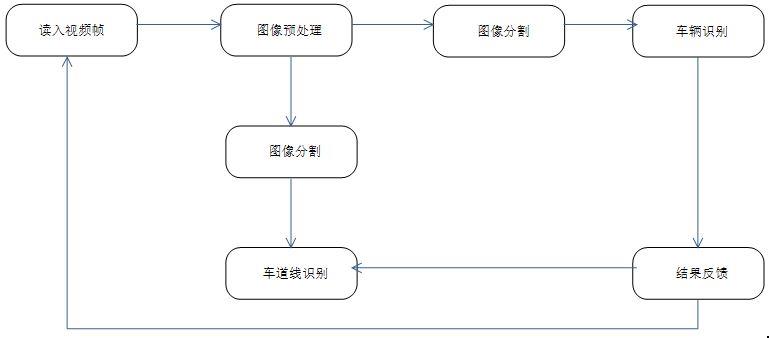
14.图1为本发明所述的汽车行驶环境感知方法的流程图;图2为视频帧图像六边形分割结果图;图3为车道线识别结果图;图4为系统最终显示效果图。
具体实施方式
15.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能后据以实施。
16.如图1所示,本发明提供了一种汽车行驶环境感知方法,其特征在于,包括如下步骤。
17.步骤一:将任意尺寸的视频帧读入。为了方便处理视频帧并保证系统的实时性,可以跳帧读入视频帧,而不会对整个系统的结果有太大的影响。
18.步骤二:采用图像分割对行车视频中的视频帧进行简单的预处理操作,减少整个系统的运算量,提高系统的运行效率。图像的处理主要集中在一定范围内便可,不需要对整幅图像进行处理,从而降低运算量。本实施例中所感兴趣的区域一般是下半部分(可能随着实际情况而略有不同),而不必考虑并不存在目标的上半部分图像。一次采用的图像分割的方式为,用六边形圈出感兴趣的区域,其中用于车道线识别的六边形的垂直高度约占整幅图像的1/3高度,用于车辆识别的六边形的垂直高度约占整幅图像的1/2高度。之所以用六边形来圈出我们感兴趣的部分,主要是因为在行驶路情况下,六边形可以很好地切除掉道路两边高光物体对车道线识别的影响与两边静态物体(相对本车是运动的)对车辆识别的影响。
19.步骤三:利用hough变换对车道线进行准确的识别,其中图像做hough变换识别车道线之前先进行sobel操作以进一步滤除非目标直线。利用hough变换对车道线进行识别的具体步骤如下:(1)将rgb视频帧图像变成灰度图,便于处理与操作;(2)对图像进行分割,除去车道线之外的部分;(3)将分割后的图像结果进行阈值化;(4)对图像做做闭运算,去除噪声点;(5)对图像做sobel算子操作,找到图像中的边缘部分;(6)对图像做hough变换检测出所有的直线;(7)对求出的直线做筛选去掉非车道线的直线与重复的直线得到最终结果。
20.步骤四:利用光流法对车辆进行准确的识别,在应用光流法后,系统得到一系列的点,通过聚类的方法将其分为多个不同的类别,再从中筛选出目标车辆,以达到最终效果。应用光流法进行车辆识别的具体步骤如下:(1)rgb图像转灰度图像;(2)图像的分割;(3)应用光流法,求出运动的在特征点集;(4)将整个点集进行聚类;
(5)筛选出目标点集;(6)结果表示与反馈。
21.光流法具体如下:(1)由于光流法需要两张图像做比较,因此为了避免重复读入视频,用缓冲区将两幅图像放进去;(2)由于光流法的应用金字塔l
‑
k算法,所以需要额外的空间存储图像金字塔,并且对图像进行见金字塔操作也是一个比较耗时的操作,所以可以采用数组来存储上一帧图像的金字塔结果,从而省去了对每帧图像都要两次金字塔操作的过程,最终使得光流法的时候有较高的效率;(3)由于采用稀疏光流法,因此需要找到图像的特征点集(即角点集合),并将其作为光流法所追踪像素点,并在光流法应用之后去除不合理的角点以提高运算的效率;(4)关于光流法函数的参数需要仔细推敲使用合适的值以达到最好的效果。
22.点集聚类主要是采用系统聚类法。该聚类方法是基于中心点间距的聚类方法,该方法可以将相对集中的点聚集到一起。从而可以将由光流法的出来的点集进行处理,形成相对集中地一些点集合,最终标识出来整个车辆。根据试验与观察所得,当聚类数小于3或最短类间距离大于某一特定值时,则停止聚类,返回聚类结果。
23.目标点集的筛选主要是将非车辆的点集滤除掉,以求出最后的结果。利用步骤三所求出的车道线方程来作为车辆状况的判断标准,即聚类中心点不在在车道线范围以内的点集不作为车辆来标识。这样便可以滤除掉大部分误识别的点集,得到正确结果。需要注意的是车道线的识别不完全的情况。在这种情况下可以在一定时间内认为车道线的方程并没有发生变化,依旧采用上次算出来的结果,而超过这个时间点时则认为车道线方程不能作为约束条件。
24.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
