1.本发明涉及一种电动致动器。
背景技术:
2.作为能够通过从外部输入驱动力的输入侧和将输入的驱动力输出的输出侧使旋转相位差变化的电动致动器,已知例如用于变更机动车的发动机的进气门与排气门的一方或两方的气门的开闭时机的可变气门正时装置的致动器。
3.作为一例,在专利文献1公开一种电动致动器,其具备电动马达、以及获得利用电动马达产生的驱动力减速并传递旋转力的辊式减速器。该电动致动器未利用电动马达驱动辊式减速器时,输入侧的构件(例如,链轮)与输出侧的构件(例如,凸轮轴)同步旋转,利用电动马达驱动辊式减速器时,在该辊式减速器的作用下,输出侧的构件相对于输入侧的构件的旋转相位差变更,由此调整气门的开闭时机。
4.作为其他的示例,在专利文献2公开一种具备摆线减速器的电动致动器。该电动致动器具备电动马达、筒状的驱动旋转体(输入旋转体)和从动旋转体(输出旋转体)、与电动马达的转子一体旋转的筒状的偏心构件、以及配置于偏心构件的内侧的行星旋转体(内齿轮)。电动致动器的摆线减速器具备:第一外齿部,其形成于驱动旋转体的外周面;第二外齿部,其形成于从动旋转体的外周面;以及第一内齿部和第二内齿部,其形成于行星旋转体的内周面并且与第一外齿部和第二外齿部啮合。
5.位于转子的内侧的偏心构件的内周面以从驱动旋转体与从动旋转体的旋转轴(中心轴)偏心的方式配置。行星旋转体由配置于偏心构件的内侧的一个滚针轴承以能够相对于该偏心构件旋转的方式支承。另外,行星旋转体通过配置于偏心构件的内周,而从驱动旋转体与从动旋转体的旋转轴偏心配置。
6.作为上述结构的电动致动器的动作,在不向电动马达通电而没有从电动马达向减速器供给驱动力的状态下,由来自外部的驱动力对驱动旋转体进行旋转驱动时,驱动旋转体的旋转经由行星旋转体传递至从动旋转体,由此从动旋转体与驱动旋转体同步旋转。
7.与之相对,向电动马达通电而从电动马达向减速器供给有驱动力时,转子与偏心构件一体旋转,由此行星旋转体相对于驱动旋转体以及从动旋转体进行偏心运动。由此,偏心构件每旋转一周,第一内齿部与第一外齿部的卡合位置在圆周方向偏离一齿的量,由此行星旋转体相对于驱动旋转体减速地旋转。
8.另外,该行星旋转体的旋转运动与上述偏心运动相配合,在行星旋转体与从动旋转体的关系中,偏心构件每旋转一周,第二内齿部与第二外齿部的卡合位置在圆周方向偏离一齿的量。由此,从动旋转体相对于行星旋转体减速地旋转。
9.另外,摆线减速器由电动马达驱动时,伴随行星旋转体的旋转运动和偏心运动,内齿部的齿面与外齿部的齿面相互滑行(滑动)地移动,由此使从动旋转体减速的同时将动力从驱动旋转体向从动旋转体传递。
10.现有技术文献
11.专利文献
12.专利文献1:日本国特开2014
‑
152766号公报
13.专利文献2:日本国特开2018
‑
194151号公报
技术实现要素:
14.发明要解决的课题
15.在专利文献1公开的电动致动器中,欲在辊式减速器实现高减速比的情况下,可能会使该辊式减速器的径向尺寸或轴向尺寸变大,而导致电动致动器的大型化。
16.在专利文献2的电动致动器中,摆线减速器由滚针轴承支承,因此能够抑制电动致动器的径向的尺寸增大。然而,仅由一个滚针轴承进行支承,因此不能充分确保减速器的刚性。在该电动致动器中,减速器由第一内齿部与第一外齿部、第二内齿部与第二外齿部这两级构成,因此在仅使用滚针轴承的支承中,电动马达工作时在行星旋转体的偏心运动的作用下径向载荷变得不均匀,可能会导致电动致动器的效率降低。
17.在采用摆线减速器的以往的电动致动器中,伴随内齿部的齿面与外齿部的齿面的滑行而传递动力,因此可能会导致该摩擦引起的差动装置的效率降低。
18.本发明鉴于上述的情况而作出,其技术性课题在于,提高减速器的刚性,防止电动致动器的效率降低。
19.用于解决课题的方案
20.本发明的电动致动器用于解决上述课题,其特征在于,所述电动致动器具备:差动装置,其具有能够以旋转轴为中心旋转的驱动旋转体、能够自转并且能够以所述旋转轴为中心公转的行星旋转体以及能够以所述旋转轴为中心旋转的从动旋转体,所述行星旋转体分别与所述驱动旋转体和所述从动旋转体啮合,在所述行星旋转体与所述驱动旋转体之间形成第一减速器,在所述行星旋转体与所述从动旋转体之间形成第二减速器,使所述第一减速器的减速比与所述第二减速器的减速比不同;电动马达,其具有驱动所述行星旋转体的转子;第一轴承,其在所述转子的内侧支承所述行星旋转体;以及第二轴承,其在以不与所述转子重叠的方式在轴向上与所述转子偏离的位置支承所述行星旋转体,所述第二轴承为深沟球轴承。
21.根据相关的结构,能够通过在第一轴承和第二轴承支承构成第一减速器和第二减速器的行星旋转体,并且由深沟球轴承构成第二轴承,由此提高第一减速器和第二减速器的刚性。由此,能够防止行星旋转体的歪斜的发生,进而能够防止电动致动器的效率降低。
22.可以使所述第二轴承支承所述第一减速器和所述第二减速器这双方。由此,提高第一减速器和第二减速器的刚性,能够有效地防止电动致动器的效率降低。
23.所述差动装置具备与所述转子一体旋转,且变更所述从动旋转体相对于所述驱动旋转体的旋转相位差的偏心构件,所述第二轴承具备固定于所述偏心构件的内周的外圈和固定于所述行星旋转体的外周的内圈。
24.可以使所述第一轴承为滚针轴承。由此,能够尽可能地减小电动致动器的径向上的尺寸。
25.可以使本发明的电动致动器具备设置于所述驱动旋转体的链轮和设置于所述从动旋转体的凸轮轴,所述电动致动器应用于变更所述链轮与所述凸轮轴的旋转相位差而变
更气门的开闭时机的可变气门正时装置。
26.可以使所述差动装置具备相互啮合的内齿部与外齿部,所述内齿部的齿面与所述外齿部的齿面的至少一方具有多个凹穴。
27.根据相关的结构,通过在差动装置的内齿部的齿面与外齿部的齿面的一方或两方形成多个凹穴,在该凹穴产生润滑油的积存,从而容易在各齿面形成油膜。由此,在内齿部与外齿部发生滑行的情况下,能够通过减小作用于各齿面的摩擦力,来防止差动装置(摆线减速器)的效率降低。
28.可以使所述行星旋转体在内周具备内齿部,所述滚针轴承具备与所述旋转体接触地滚动的滚动体,所述行星旋转体具有供所述滚动体接触地滚动的外周面,所述外周面具有多个凹穴。
29.根据相关的结构,通过在供滚针轴承的滚动体接触地滚动的行星旋转体的外周面(滚行面)形成凹穴,在该外周面容易形成润滑油引起的油膜。由此,能够通过利用油膜润滑外周面,从而防止该外周面的磨损、咬死。
30.发明效果
31.根据本发明,能够提高减速器的刚性,防止电动致动器的效率降低。
附图说明
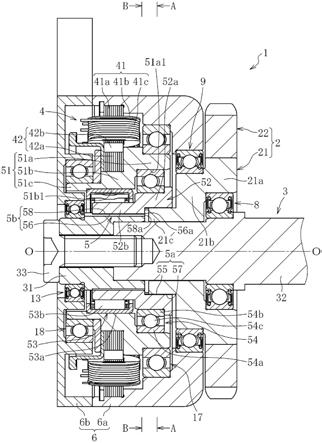
32.图1是本发明的电动致动器的剖视图。
33.图2是电动致动器的分解立体图。
34.图3是电动致动器的主要部分放大剖视图。
35.图4是驱动旋转体(主体)的立体图。
36.图5是从动旋转体(主体)的立体图。
37.图6是行星旋转体的立体图。
38.图7是内齿部与外齿部的放大剖视图。
39.图8是图1的a
‑
a向视线剖视图。
40.图9是图1的b
‑
b向视线剖视图。
41.图10是示出减速器的内齿部与外齿部的啮合的进行过程的剖视图。
具体实施方式
42.以下,基于附图对本具体实施方式进行说明。需要说明的是,用于说明本发明的各附图中,对具有相同的功能或形状的构件、构成部件等构成要素,只要能够辨别就标注相同的附图标记,从而在进行一次说明后省略其说明。
43.图1是本实施方式的电动致动器的纵剖视图,图2是该电动致动器的分解立体图,图3是该电动致动器的主要部分放大剖视图。本实施方式的电动致动器虽然例如作为发动机(驱动源)的可变气门正时装置而使用,但不限于该用途。
44.如图1至图3所示,电动致动器1具备作为主要的构成要素的驱动旋转体2、从动旋转体3、电动马达4、差动装置5以及收容这些要素的外壳6。
45.驱动旋转体2作为整体而构成为轴向两端开口的圆筒状,且具有主体21和作为来自发动机的驱动力的输入部的链轮22。主体21与链轮22都以旋转轴o为中心而配置于同轴
上。从而,主体21与链轮22在来自发动机的驱动力的作用下,以旋转轴o为中心一体旋转。
46.主体21具备:第一筒部21a,其设置有链轮22;第二筒部21b,其由外壳6支承;以及第三筒部21c,其作为差动装置5的一部分而发挥功能。链轮22以能够向主体21的第一筒部21a传递转矩的方式设置,且在从发动机经由链传递来的驱动力的驱动下旋转。
47.从动旋转体3为将从驱动旋转体2传递来的驱动力输出的构件,且具有圆筒状的主体31和凸轮轴32。凸轮轴32以具备一个或多个凸轮(省略图示),且驱动发动机的进气门与排气门的至少一方的方式构成。主体31与凸轮轴32在旋转轴o上同轴配置,且通过定位销33而彼此结合。由此,主体31与凸轮轴32以旋转轴o为中心一体旋转。
48.在凸轮轴32的外周面与驱动旋转体2的主体21的第一筒部21a的内周面之间设置有轴承8。在驱动旋转体2的主体21的第二筒部21b的外周面与外壳6之间配置有轴承9。在这些轴承8、9的作用下,允许驱动旋转体2与从动旋转体3之间的相对旋转。虽然轴承8、9由滚动轴承构成,但不限于此,能够由滑动轴承等轴承构成。
49.为了便于组装,外壳6分割为有底圆筒状的外壳主体6a和盖部6b。外壳主体6a与盖部6b使用螺栓等紧固机构而一体化。在盖部6b设置有筒状的突起6c、6d(参照图2),其用于向外部引出用于向电动马达4供电的供电线、与检测电动马达4的转速的未图示的转速检测传感器连接的信号线。在外壳6的盖部6b的内周面与从动旋转体3的主体31的外周面之间配置有轴承13。
50.电动马达4为径向间隙型的马达,其具有固定于外壳主体6a的定子41和以与定子41的径向内侧保持间隙而对置的方式配置的转子42。定子41具有:定子铁心,其由在轴向层叠的多个电磁钢板构成;线圈架41b,其由装配于定子铁心41a的绝缘材料构成;以及定子线圈41c,其卷绕于线圈架41b。转子42具有环状的转子铁心(转子内部)42a和安装于转子铁心42a的多个磁铁42b。电动马达4利用在定子41与转子42之间作用的励磁力,使转子42以旋转轴o为中心旋转。
51.差动装置5具备作为主要的构成要素的驱动旋转体2的主体21、从动旋转体3的主体31、与转子42一体旋转的偏心构件51、配置于偏心构件51的内周的行星旋转体52、配置于偏心构件51与行星旋转体52之间的第一轴承53以及第二轴承54。需要说明的是,在外壳6的内部填充有润滑油,且向差动装置5供给该润滑油。
52.偏心构件51作为整体而构成为轴向两端开口的圆筒状,且一体地具有大径筒部51a、构成为比大径筒部51a小径的中径筒部51b、以及形成为比中径筒部51b小径的小径筒部51c。
53.大径筒部51a以不与转子铁心42a重叠的方式从中径筒部51b沿轴向突出。大径筒部51a经由轴承17被外壳6的外壳主体6a支承为旋转自如。中径筒部51b以在轴向上与转子铁心42a重叠的方式固定于该转子铁心42a的内周。小径筒部51c以不与转子铁心42a重叠的方式从中径筒部51b沿轴向(在大径筒部51a的相反侧)突出。小径筒部51c经由轴承18被外壳6的盖部6b支承为旋转自如。
54.大径筒部51a的外周面、中径筒部51b的外周面以及小径筒部51c的外周面形成为与旋转轴o同轴的圆筒面。在偏心构件51的大径筒部51a的内周面形成有偏心于旋转轴o的圆筒面上的偏心内周面51a1。另外,在偏心构件51的中径筒部51b的内周面形成有偏心于旋转轴o的圆筒面状的偏心内周面51b1。偏心构件51的大径筒部51a和中径筒部51b因其外周
面与偏心内周面51a1、51b1的关系而具有厚壁部分和薄壁部分。
55.行星旋转体52作为整体而构成为轴向两端开口的圆筒状,且具备大径筒部52a和小径筒部52b。在大径筒部52a的内周形成第一内齿部55,在小径筒部52b的内周形成第二内齿部56。第一内齿部55与第二内齿部56均由径向的剖面描绘曲线(例如次摆线系曲线)的多个齿构成。第一内齿部55与第二内齿部56在轴向上偏离的位置形成。第二内齿部56的节圆直径小于第一内齿部55的节圆直径。另外,第二内齿部56的齿数少于第一内齿部55的齿数。
56.第二内齿部56的齿宽方向的第一内齿部55侧的端部56a以与行星旋转体52的大径筒部52a的外周面在轴向上重叠的方式形成。换言之,第二内齿部56的一部分(端部56a)以在轴向(齿宽方向)上与第二轴承54重叠的方式形成。
57.在驱动旋转体2的主体21的第三筒部21c的外周面形成与第一内齿部55啮合的第一外齿部57。另外,在从动旋转体3的主体31的外周面形成与第二内齿部56啮合的第二外齿部58。第一外齿部57与第二外齿部58均由径向的剖面描绘曲线(例如次摆线系曲线)的多个齿形成。第二外齿部58的节圆直径小于第一外齿部57的节圆直径,第二外齿部58的齿数少于第一外齿部57的齿数。
58.第二外齿部58的齿宽方向的一端部58a以与行星旋转体52的大径筒部52a的外周面在轴向上重叠的方式配置。换言之,第二外齿部58的一部分(端部58a)以在轴向(齿宽方向)上与第二轴承54重叠的方式形成。
59.第一外齿部57的齿数少于相互啮合的第一内齿部55的齿数,优选少一个。同样地,第二外齿部58的齿数也少于相互啮合的第二内齿部56的齿数,优选少一个。作为一例,在本实施方式中,将第一内齿部55的齿数设为24个,将第二内齿部56的齿数设为20个,将第一外齿部57的齿数设为23个,将第二外齿部58的齿数设为19个。
60.相互啮合的第一内齿部55与第一外齿部57构成第一减速器5a,第二内齿部56与第二外齿部58构成第二减速器5b。第一减速器5a与第二减速器5b都被称为摆线减速器。两个减速器5a、5b的减速比不同,在本实施方式中,设定第一减速器5a的减速比大于第二减速器5b的减速比。通过使这两个减速器5a、5b的减速比不同,能够对应电动马达4的工作状态使凸轮轴32的旋转变化(差动)。
61.图4是驱动旋转体2(主体21)的立体图,图5是从动旋转体3(主体31)的立体图。图6是行星旋转体52的立体图,图7是各减速器5a、5b的各内齿部55、56与各外齿部57、58的放大剖视图。
62.如图4至图7所示,在构成第一减速器5a与第二减速器5b的第一内齿部55、第二内齿部56、第一外齿部57、以及第二外齿部58的各齿面形成有多个凹穴59(凹部)。需要说明的是,在图4至图6中,对形成有凹穴59的部分标有阴影而进行表示。优选凹穴59的范围涉及构成第一减速器5a与第二减速器5b的第一内齿部55、第二内齿部56、第一外齿部57、以及第二外齿部58的各齿面的整个区域,但不限于该范围。
63.凹穴59通过例如在各齿面实施喷丸等而形成。对于喷丸,能够通过适当选择抛射材料的种类(粒径、组成、密度、硬度、强度)、抛射速度、抛射角度,抛射量等,在各齿面形成适合电动致动器1的规格的凹穴59。抛射材料的粒径虽然设为例如0.05~0.6mm,但不限于该范围。
64.第一轴承53配置于偏心构件51的偏心内周面51b1与行星旋转体52的小径筒部52b
的外周面之间。从而,行星旋转体52的外周面与内周面的中心(p)位于偏心于旋转轴o的位置。通过该第一轴承53,行星旋转体52支承为能够相对偏心构件51地相对旋转。第一轴承53例如由具有外圈53a、滚动体53b(滚针)的滚针轴承构成。外圈53a固定于偏心构件51的中径筒部51b的偏心内周面51b1。滚动体53b与行星旋转体52的小径筒部51c的外周面(滚行面)接触。小径筒部52b的外周面52b2作为供第一轴承53的滚动体53b接触且滚动的滚行面而构成。
65.如图6所示,在行星旋转体52的小径筒部52b的外周面52b2通过例如喷丸等手段而形成有多个凹穴59。凹穴59的尺寸、形状与形成于各减速器5a、5b的各齿面的凹穴相同。优选凹穴59的范围涉及行星旋转体52的外周面52b2的整个区域,但不限于该范围。
66.第二轴承54以不与电动马达4的转子铁心42a的内周重叠的方式配置于在轴向上与第一轴承53偏离的位置。具体地说,第二轴承54配置于行星旋转体52的大径筒部52a与偏心构件51的大径筒部51a的偏心内周面51a1之间。
67.第二轴承54由具有外圈54a、内圈54b、滚动体54c(滚珠)的深沟球轴承构成。第二轴承54的外圈54a固定于(压入)偏心构件51的大径筒部51a的偏心内周面51a1。第二轴承54的内圈54b固定于(压入)行星旋转体52的大径筒部52a的外周面。
68.第二轴承54以支承第一减速器5a与第二减速器5b这两方的方式跨各减速器5a、5b地配置。即,第二轴承54以在轴向上与第一减速器5a的一部分重叠且以在轴向上与第二减速器5b的一部分重叠的方式配置于偏心构件51与行星旋转体52之间。如图3所示,第二轴承54与第一减速器5a重叠的距离d1大于第二轴承54与第二减速器5b重叠的距离d2。
69.图8是在第一减速器5a剖开后的剖视图(图1的a
‑
a线向视剖视图),图9是在第二减速器5b剖开后的剖视图(图1的b
‑
b线向视剖视图)。
70.如图8所示,第一内齿部55的中心p在径向上相对于旋转轴o偏心距离e。从而,第一内齿部55与第一外齿部57在圆周方向上的一部分的区域为相互啮合的状态,在所述区域的径向相反侧的区域为不啮合的状态。另外,如图9所示,第二内齿部56的中心p也在径向上相对于旋转轴o偏心距离e,因此第二内齿部56与第二外齿部58在圆周方向上的一部分的区域为相互啮合的状态,在所述区域的径向相反侧的区域为不啮合的状态。需要说明的是,图8与图9彼此的向视方向不同,因此第一内齿部55与第二内齿部56各自的偏心方向虽然在各图中示出为彼此左右相反方向,但第一内齿部55与第二内齿部56在相同方向上偏心相同距离e的量。
71.在此,将差动装置5的减速比设为i,将马达旋转速度设为nm,将链轮22的旋转速度设为ns,则输出旋转相位角度差为(nm
‑
ns)/i。
72.另外,将第一减速器5a的减速比设为i1,将第二减速器5b的减速比设为i2,则本实施方式的差动装置5的减速比可以通过下述公式1而求得。
73.减速比=i1
×
i2/|i1
‑
i2|
···
公式1
74.例如,第一减速器5a的减速比(i1)为24/23,第二减速器5b的减速比(i2)为20/19的情况下,根据上述公式1求得减速比为120。这样,在本实施方式的差动装置5中,能够通过较大的减速比得到高转矩。
75.在本实施方式的电动致动器1中,在行星旋转体52的内径侧配置有驱动旋转体2与从动旋转体3,因此采用中空马达作为驱动行星旋转体52的电动马达4,并采用将该中空马
达配置于行星旋转体52的外径侧的布局。因此,得到以下优点:空间效率变得良好,能够实现电动致动器1的紧凑化(特别是轴向尺寸的紧凑化)。
76.另外,在本实施方式的电动致动器1中,在转子42的内径侧采用滚针轴承作为第一轴承53,因此能够尽可能地减小电动致动器1的径向尺寸。此外,以不与转子铁心42a重叠的方式将作为第二轴承54的深沟球轴承配置于在轴向上偏离的位置,因此能够防止径向的尺寸增大,且尽可能地提高第一减速器5a与第二减速器5b的刚性,抑制在行星旋转体52发生的歪斜,由此防止电动致动器1的效率降低。
77.接下来,参照图1至图10对本实施方式的电动致动器的动作进行说明。
78.在发动机的动作中,在向链轮22传递的来自发动机的驱动力的作用下驱动旋转体2旋转。
79.在不向电动马达4通电而没有从电动马达4向差动装置5的输入的状态下,驱动旋转体2的旋转经由行星旋转体52而向从动旋转体3传递,从而从动旋转体3与驱动旋转体2一体旋转。即,驱动旋转体2与行星旋转体52通过在第一内齿部55与第一外齿部57的啮合部的转矩传递,保持该啮合状态地一体旋转。同样地,行星旋转体52与从动旋转体3也保持第二内齿部56与第二外齿部58的啮合位置地一体旋转。因此,驱动旋转体2与从动旋转体3保持相同的旋转相位地旋转。
80.此后,例如发动机转移到怠速运转等低转速域时,通过公知的手段例如电子控制等向电动马达4通电,使转子42比链轮22的转速相对慢或快地旋转。使电动马达4工作时,与转子42的转子铁心42a结合的偏心构件51以旋转轴o为中心一体旋转。与之相伴,伴随具备薄壁部分与厚壁部分的偏心构件51的旋转而产生的按压力经由第一轴承53作用于行星旋转体52。在该按压力的作用下,在第一内齿部55与第一外齿部57的啮合部产生圆周方向上的分力,因此行星旋转体52相对于驱动旋转体2相对地进行偏心旋转运动。换句话说,行星旋转体52以旋转轴o为中心公转,且以第一内齿部55与第二内齿部56的中心p为中心自转。此时,若行星旋转体52每公转一周,则第一内齿部55与第一外齿部57的啮合位置在圆周方向每偏离一齿的量,因此行星旋转体52减速地旋转(自转)。
81.图10是示出电动马达4的工作中的第一内齿部55与第一外齿部57的啮合的进行过程的剖视图。上述那样行星旋转体52公转的同时自转的情况下,第一内齿部55的齿面与第一外齿部57的齿面以接触的状态发生滑行的同时(滑动的同时)相对移动。第一外齿部57从在图10的实线示出的位置与第一内齿部55a接触的状态起,维持与第一内齿部55a接触的状态而相对地移动至单点划线示出的位置。此后,第一外齿部57离开曾接触的第一内齿部55a,如双点划线所示,欲与下一个第一内齿部55b接触,并重复同样的移动。
82.另外,通过使行星旋转体52进行上述的偏心旋转运动,从而行星旋转体52每公转一周,第二内齿部56与第二外齿部58的啮合位置在圆周方向上偏离一齿的量。由此,从动旋转体3相对于行星旋转体52减速地旋转。这样,通过电动马达4驱动行星旋转体52,由此在来自链轮22的驱动力重叠有来自电动马达4的驱动力,从动旋转体3的旋转成为受到来自电动马达4的驱动力的影响的差动的状态。因此,能够在正反方向变更相对于驱动旋转体2的从动旋转体3的相对的旋转相位差,能够在进角方向或迟角方向变更由凸轮轴32的凸轮控制的气门的开闭时机。需要说明的是,第二内齿部56(56a、56b)的齿面与第二外齿部58的齿面间的相对性的移动(啮合的进行过程)以与图10说明的第一内齿部55(55a,55b)以及第一外
齿部57的情况同样的方式进行。
83.能够通过上述那样变更气门的开闭时机,实现怠速运转时的发动机的旋转的稳定化和燃费的改善。另外,发动机的运转从怠速状态转移至通常运转,例如转移至高速旋转时,使相对于链轮22的电动马达4的相对旋转的速度差变大,由此能够使凸轮轴32相对于链轮22的旋转相位差变更为适合高旋转的旋转相位差,能够实现发动机的高输出化。
84.如上所述,在本实施方式的电动致动器1中,通过在各减速器5a、5b的各内齿部55、56、各外齿部57、58的各齿面形成多个凹穴59,从而在该凹穴59能够积存润滑油,在各面容易形成油膜。因此,通过减少作用于在电动马达4的动作中产生滑行的同时进行动力传递的各齿面的摩擦力,能够防止差动装置5的效率降低,并且能够通过防止磨损和咬死而实现差动装置的长寿命化。另外,与通过镀膜等在各面形成被膜的情况相比,也不会导致磨损引起的被膜的剥离。另外,通过在行星旋转体52的小径筒部52b的滚行面(外周面52b2)形成凹穴59,能够有效地防止该滚行面的磨损和咬死。
85.需要说明的是,本发明不限于上述实施方式的结构,也不限于上述的作用效果。本发明能够在不脱离本发明主旨的范围进行各种变更。
86.在上述的实施方式中,第一轴承53虽然作为滚针轴承而例示,但并不局限于此,也可以由深沟球轴承等轴承构成。
87.在上述的实施方式中,虽然示出在内齿部55、56、外齿部57、58这两方形成凹穴59的例子,但本发明不限于该结构。例如,也可以仪在相互啮合的内齿部55、56与外齿部57、58之中的任一方形成凹穴59。
88.附图标记说明
[0089]1ꢀꢀꢀꢀꢀꢀ
电动致动器
[0090]2ꢀꢀꢀꢀꢀꢀ
驱动旋转体
[0091]3ꢀꢀꢀꢀꢀꢀ
从动旋转体
[0092]4ꢀꢀꢀꢀꢀꢀ
电动马达
[0093]5ꢀꢀꢀꢀꢀꢀ
差动装置
[0094]
5a
ꢀꢀꢀꢀꢀ
第一减速器
[0095]
5b
ꢀꢀꢀꢀꢀ
第二减速器
[0096]
22
ꢀꢀꢀꢀꢀ
链轮
[0097]
32
ꢀꢀꢀꢀꢀ
凸轮轴
[0098]
42
ꢀꢀꢀꢀꢀ
转子
[0099]
51
ꢀꢀꢀꢀꢀ
偏心构件
[0100]
52
ꢀꢀꢀꢀꢀ
行星旋转体
[0101]
52b2
ꢀꢀꢀ
行星旋转体的外周面
[0102]
53
ꢀꢀꢀꢀꢀ
第一轴承(滚针轴承)
[0103]
53b
ꢀꢀꢀꢀ
滚动体
[0104]
54
ꢀꢀꢀꢀꢀ
第二轴承
[0105]
54a
ꢀꢀꢀꢀ
第二轴承的外圈
[0106]
54b
ꢀꢀꢀꢀ
第二轴承的内圈
[0107]
55
ꢀꢀꢀꢀꢀ
第一内齿部
[0108]
56
ꢀꢀꢀꢀꢀ
第二内齿部
[0109]
57
ꢀꢀꢀꢀꢀ
第一外齿部
[0110]
58
ꢀꢀꢀꢀꢀ
第二外齿部
[0111]
59
ꢀꢀꢀꢀꢀ
凹穴
[0112]
o
ꢀꢀꢀꢀꢀꢀ
旋转轴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。