1.本发明涉及一种数字比例压力控制器,用于例如一流体阀門。
背景技术:
2.本段落提供与本发明有关的背景信息,所述背景信息不一定是现有技术。比例压力控制器通常包括多个内部的主阀,所述多个内部的主阀被移动以允许将加压流体排放到一压力控制装置中。这种比例压力控制器在所述压力控制装置处对加压流体的操作压力进行调节。通常使用多个电磁阀操作器来重新定位多个主阀。这种配置增加了所述比例压力控制器的重量和费用,并且需要大量电流来重新定位所述多个主阀。
3.已知的比例压力控制器通常也容易受到系统压力下冲或过冲的影响。由于所述多个主阀的质量和操作时间,控制所述多个主阀以减少或停止加压流体流向所述压力控制装置的信号可能会过早或过晚,从而避免未达到或超过所需的操作压力。当发生这种情况时,如所述控制器“搜寻(hunts)”所需的操作压力时,操作电磁执行器的控制系统将开始快速打开和关闭序列。这种迅速的操作称为“马达划船(motor
‑
boating)”,增加了所述比例压力控制器的磨损并增加了运营成本。
4.已知的多个比例压力控制器通常包括一入口、一出口以及一排出口。通常,在通过所述比例压力控制器后,将高压流体供应到所述入口,所述流体通过所述出口离开所述压力控制装置,并且多余的流体压力通过排出口从所述比例压力控制器中排出。与已知的比例压力控制器相关的另一个问题是,即使在期望出口压力为零的情况下,也难以在所述比例压力控制器的出口实现零压力。无法在比例压力控制器的出口处产生零压力,可能会对压力控制装置的操作和/或性能产生负面影响。
5.此外,有时流体可能会从压力操作装置回流到出口,并重新进入比例压力控制器。从立场来看这是不希望的,因为流体的回流可能被污染或变脏,这可能会对比例压力控制器的压力传感器产生负面影响。
技术实现要素:
6.本段落提供本发明的总体概述,而不是全部范围或所有特征的全面公开。
7.本发明提供一种阀门组件,所述阀门组件具有多个填充阀及多个排放阀,所述多个填充阀允许一流体从一流体入口流入一内部流路,以增加从一流体出口输出的流体的一压力,所述多个排放阀允许所述流体从所述内部流路流至所述排出口,以降低从所述流体出口输出的流体的所述压力。所述阀门组件包含一控制器,所述控制器配置为接收一命令信号以及配置为接收来自压力传感器的一信号,所述命令信号包含从所述流体出口输出的流体的一期望压力,所述信号表示从所述流体出口输出的流体的所述实际压力,其中基于所述命令信号与表示所述实际压力的所述信号的比较,所述控制器配置为选择性地打开和关闭每个填充阀和每个排放阀,直到所述实际压力等于所述期望压力为止。
8.根据本文提供的描述,其他应用领域将变得显而易见。概述中的描述和具体示例
仅主要在用于说明的目的,并且不意图限制本发明的范围。
附图说明
9.本文描述的附图仅用于所选实施例的说明性目的,而不是所有可能的实现方式,并且无意于限制本发明的范围。
10.图1是根据本发明原理示例性的阀门组件的示意图。
11.图2是示例的阀门组件的控制器的示意图。
12.图3是当阀门组件用于快速加压流体时的阀门组件的示意图。
13.图4是当阀门组件用于缓慢加压流体时的阀门组件的示意图。
14.图5是当阀门组件用于缓慢地使流体减压时的阀门组件的示意图。
15.图6是当阀门组件用于快速减压流体时的阀门组件的示意图。
16.图7是根据本发明原理另一示例性的阀门组件的示意图。
17.图8是当阀门组件用于快速加压流体时的阀门组件的示意图。
18.图9是当阀门组件用于快速加压流体时的阀门组件的示意图,但与图8相比速度较慢。
19.图10是当阀门组件用于缓慢加压流体时的阀门组件的示意图。
20.图11是当阀门组件用于缓慢加压流体时的阀门组件的示意图,但与图10相比速度较慢。
21.图12是当流体压力处于期望压力时的阀门组件的示意图。
22.图13是当阀门组件用于缓慢地使流体减压时的阀门组件的示意图。
23.图14是当阀门组件用于减压流体时的阀门组件的示意图,但与图13相比,其发生率更高。
24.图15是具有图7
‑
14中所示的示意性构造的阀门组件的立体图。
25.图16是图14所示的阀门组件的立体图,其中阀门壳体和阀门壳体的各个部分均已移除。
26.图17是图15所示的阀门组件的剖视图。
27.图18是图15所示的阀门组件的剖视图。
28.通过附图的多个视图,相应的附图标记指示相应的部分。
具体实施方式
29.现在将参考附图更全面地描述示例的多个实施例。
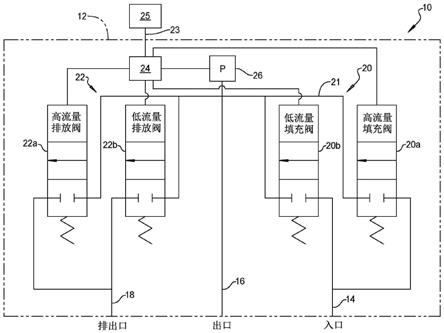
30.图1示意性地显示说明了根据本发明原理的阀门组件10。所述阀门组件10包括一壳体12,所述壳体12具有一流体入口14、一流体出口16以及一排出口18。所述阀门组件10包括多个填充阀20,所述多个填充阀20与所述流体入口14以及所述流体出口16连通。所述阀门组件10还包括多个排放阀22,所述多个排放阀22与所述排出口18连通。一内部流路或次级流路21是所述壳体12内的一系列的多个开放路径,用以将所述多个填充阀20,所述多个排放阀22和所述流体出口16互连。一控制器24与一压力传感器26、每个填充阀20和每个排放阀22通信,以动态地控制流过所述阀门组件10的流体,并动态地控制所述阀门组件10的所述流体出口16处的流体的压力。所述压力传感器26与次级流路21连通,所述次级流路21
与所述流体出口16连通,以产生指示所述次级流路21以及流体出口16内的压力的信号。在显示说明的示例实施例中,所述阀门组件10配置为对空气加压并限制空气的流动。然而,应当理解的是,所述阀门组件10可以配置为对本领域技术人员已知的任何流体加压和限制,包括气体和液体。
31.如图2所示,控制器24包括一输入端23,所述输入端23被配置为从使用所述阀门组件10的系统(未绘示)的另一控制器或电路25接收电压、电流或数字输入(以下称为“命令信号”)。例如,在其中使用阀门组件10的系统可以是致动器系统。通常,所述命令信号是指示要从阀门组件10通过所述流体出口16输出的期望压力的信号。所述输入端23也可以配置为从电源(未绘示)接收电力,所述电源用于为控制器24和阀门组件10供电。
32.在接收到所述命令信号之后,所述输入端23将所述命令信号传送到一信号微分电路27。信号微分电路27配置为将命令信号与从一压力传感器26接收的表示所述流体出口16处的压力的信号进行比较。根据控制器接收到的命令信号与压力传感器26输出的周期性压力信号之间的比较,所述控制器24配置为动态地控制每个填充阀20和每个排放阀22,以控制从所述流体出口16输出流体的压力,这将在后面更详细地描述。控制器24还可包括一传感器校正电路29,所述传感器校正电路29从所述压力传感器26接收压力信号,并将所述压力信号校正为已知的传感器输出与已知的压力标准,然后,将校正后的信号传送到信号微分电路27,接着在信号微分电路27中将校正后的信号与命令信号进行比较。还应该理解的是,控制器24可以配置为向系统的操作者输出反馈信号,所述反馈信号可以是电压、电流或表示阀门组件10正在输出压力的数字信号,或表示阀门组件10正在输出命令信号的压力的数字信号。
33.尽管在图2中将所述压力传感器26显示说明为控制器24的一部分,应当理解的是,如图1所示,所述压力传感器26可以与控制器24分离。此外,所述压力传感器26可以是产生表示压力的信号的任何类型的压力传感器。具体地,在不脱离本发明范围的情况下,由所述压力传感器26产生的信号可以是电压,电流或数字信号。
34.所述多个填充阀20和所述多个排放阀22中的每个可以是直接操作的电磁阀、电磁先导操作阀或本领域技术人员已知的任何其他类型的电动阀。为了打开及关闭阀,所述控制器24可以与阀驱动器电路28集成在一起,所述阀驱动器电路28配置为基于从信号微分电路27接收的输入而独立地向每个填充阀20每个排放阀22施加电压。选择地,所述阀驱动器电路28可以与所述控制器24分离,并且与所述控制器24通信。无论如何,基于由所述压力传感器26检测到的压力,所述控制器24配置为表示所述阀驱动器电路28向所述多个填充阀20和/或所述多个排放阀22施加电压,以打开所述多个填充阀20和/或所述多个排放阀22。
35.在显示说明的实施例中,所述多个填充阀20包括一高流量填充阀20a和一低流量填充阀20b。与所述低流量填充阀20b相比,所述高流量填充阀20a通常构造成允许更多的流体流过。与所述低流量填充阀20b相比,具有更大孔尺寸的所述高流量填充阀20a可以使流过所述高流量填充阀20a的流体流量更大,或者所述高流量填充阀20a比所述低流量填充阀20b大。类似地,所述多个排放阀22包括一高流量排放阀22a和一低流量排放阀22b。与所述低流量排放阀22b相比,所述高流量排放阀22a通常构造成允许更多的流体从中流过。与低流量排放阀22b相比,节流孔尺寸更大的高流量排放阀22a可以使流过所述高流量排放阀22a的流体流量更大,或者所述高流量排放阀22a比所述低流量排放阀22b大。
36.图1显示说明当每个填充阀20和每个排放阀22关闭时(即,流体出口16处的压力为零,或流体出口16处的压力处于命令信号指示的压力)。现在参考图3至图6,将描述在升高的压力下加压,并从所述阀门组件10输出流体的方法。图3显示说明一种配置,其中所述阀门组件10被通电启动,以快速地对阀门组件10加压并且从所述流体出口16输出的流体。
37.具体地,当所述阀门组件10要从例如零的压力快速加压到例如30磅/平方英寸(psi)的压力时,所述控制器24指示所述阀驱动器电路28向两个填充阀20施加电压。当每个填充阀20通电时,允许流体从所述流体入口14流动,并通过每个填充阀20进入次级流路21,并从所述流体出口16输出。当允许流体从所述流体入口14通过每个填充阀20流到所述次级流路21并流到所述流体出口16时,所述压力传感器26监视压力。当压力接近期望压力(例如30psi)时,所述控制器24指示所述阀驱动器电路28停止给所述高流量填充阀20a通电(图4)。因为所述低流量填充阀20b仍被通电,所以仍然允许流体从所述流体入口14通过所述低流量填充阀20b流向所述流体出口16,这使得所述阀门组件10能够缓慢达到期望压力(例如30psi),从而达到从所述流体出口16输出。以这种方式,防止或至少基本上最小化了过冲的机会(即,允许压力大于期望压力)。一旦所述控制器24从所述压力传感器26接收到所述流体出口16处的压力已经达到期望压力的信号,所述控制器24就指示所述阀驱动器电路28停止给所述低流量填充阀20b通电。
38.如果在使所述多个填充阀20断电之后,由所述压力传感器26检测到的所述流体出口16处的压力超过(即大于)期望压力(例如,30psi),则所述控制器24配置为指示所述阀驱动器电路28使所述低流量排放阀22b通电(图5),从而允许流体通过所述排出口18缓慢流出所述阀门组件10。因为仅所述低流量排放阀22b被通电,所以所述流体出口16处的压力被允许缓慢地降低到所述期望压力。一旦所述控制器24从所述压力传感器26接收到所述流体出口16处的压力已经达到期望压力的信号,所述控制器24就指示所述阀驱动器电路28停止给所述低流量排放阀22b通电。替代地,如果所述压力传感器26由于使用所述低流量排放阀22b而检测到所述流体出口16处的压力已经降低到期望压力以下,所述控制器24可以指示所述阀驱动器电路28重新给所述低流量填充阀20a通电,以允许所述流体出口16处的压力再次逐渐增加到所述期望压力(图4)。
39.图6显示说明可能需要将所述流体出口16处的压力快速降低至例如零压力的情况。在这种情况下,所述控制器24可以指示所述阀驱动器电路28致动每个排放阀22,以迅速允许流体通过每个排放阀22和每个排出口18而离开所述阀门组件10。尽管在图6中将每个排放阀22显示说明为通电以快速降低所述流体出口16处的压力。应当理解的是,仅所述高流量排放阀22a可以用于减小所述流体出口16处的压力。
40.尽管可以使用图6的配置将所述流体出口16的压力快速降低到零,但应该理解的是,当所述流体出口16的压力较高时(例如,30psi),可以使用图6的配置,以及包括所述阀门组件10的系统仅需要以显着降低的压力(例如,15psi)的压力输出流体。在这种情况下,两个排放阀22或仅所述高流量排放阀22a可被通电,以快速降低所述流体出口16处的压力。当所述压力传感器26监测压力的降低时,所述高流量排放阀22a可被断电,以将压力的降低减慢至目标压力(例如15psi),这仅允许所述低流量排放阀22b使流体通过所述排出口18而离开所述阀门组件10(图5)。如果由所述压力传感器26检测到的所述流体出口16处的压力低于(即小于)目标压力(例如15psi),则所述低流量排放阀22b可以被断电,并且所述低流
量填充阀20b可以被重新通电(图4),以允许所述流体出口16处的压力达到目标压力。
41.根据上述实施例,可以动态地控制从所述阀门组件10输出的压力和流体。换句话说,通过连续使用所述压力传感器26来检测所述流体出口16处的压力,可以控制每个填充阀20和每个排放阀22以增加所述流体出口16处的压力,降低所述流体出口16处的压力或维持所述流体出口16处的压力。而且,由于使用所述低流量填充阀20b和所述低流量排放阀22b,所述流体出口16处的压力可以被更严格地控制,以实质上最小化期望压力或目标压力已经过高或过低的情况。另外,如果仅需要在所述流体出口16处小的压力变化,则可以使用所述低流量填充阀20b和所述低流量排放阀22b之一或两者来实现所述期望压力的小的变化。此外,应当理解的是,通过使用所述多个填充阀20和所述多个排放阀22,如果所述多个填充阀20和/或所述多个排放阀22其中之一发生故障,则所述阀门组件10仍然可操作,尽管能力降低。
42.尽管图1以及图3至图6所示的实施例使用的是多个填充阀20和多个排放阀22,在每组阀中都包括一个高流量阀20a和22a以及一个低流量阀20b和22b,而且本发明不应当限于此。就这一点而言,所述多个填充阀20可以包括更多数量的多个高流量填充阀20a和/或多个低流量填充阀20b,并且所述多个排放阀22可以包括更多数量的多个高流量排放阀22a和/或多个低流量排放阀22b。
43.例如,参考图7至图14,显示说明一实施例,其中所述阀门组件10包括多个填充阀20,所述多个填充阀20包括一高流量填充阀20a、一低流量填充阀20b、一较低流量填充阀20c以及一最低流量填充阀20d。所述阀门组件10还包括多个排放阀22,其中所述阀门组件10包括一高流量排放阀22a、一低流量排放阀22b以及一较低流量排放阀22c。填充阀20的任何组合和排放阀22的任何组合都可以考虑。例如,可以省略任何填充阀20a
‑
20d,而有利于另一个高流量填充阀20a、另一个低流量填充阀20b、另一个较低流量填充阀20c或另一个最低流量填充阀20d。类似地,可以省略任何排放阀22a
‑
22c,而有利于另一个高流量排放阀22a、另一个低流量排放阀22b或另一个较低流量填充阀20c。另外,应当理解的是,所述多个排放阀22还可以另外包括一最低流量排放阀,所述最低流量排放阀类似于所述最低流量填充阀20d。
44.与图1和图3至图6所示的实施例相似,图7至图14所示的阀门组件10包括一壳体12,所述壳体具有一流体入口14、一流体出口16、一排出口18以及次级流路21。而且,所述阀门组件10包括如图2所示的一控制器24以及一压力传感器26。尽管在图7至图14中将所述压力传感器26显示说明为与所述控制器24分开,但应理解的是,所述压力传感器26可以是所述控制器24的一部分,如图2所示。无论如何,基于由所述压力传感器26检测到的压力,所述控制器24配置为指示所述阀驱动器电路28独立地施加电压给每个填充阀20和每个排放阀22,分别打开和关闭所需的阀20和/或22,从而精确地控制可以从所述流体出口16输出流体的压力。
45.另外,尽管不是必需的,所述壳体12可包括仅与所述小流量排放阀22c连通的辅助排出口30。当所述阀门组件10在应用中用于对一个或多个致动器加压时,使用辅助排气30可能是有利的,并且当压力为零时,来自致动器的脏污或污染的流体(例如空气)可能通过所述流体出口16重新进入所述阀门组件10。在这些情况下,重要的是将所述压力传感器26与这种脏污或污染的流体隔离。
46.如图7所示,当所述多个排放阀22a和22b未通电时,任何通过所述流体出口16重新进入所述阀门组件10的流体,将由所述排放阀22a和22b直接引导至所述排出口18。以这种方式,所述压力传感器26与可通过所述流体出口16重新进入所述阀门组件10,并将脏污或受污染的流体隔离。此外,可以看到的是,在未对低流量排放阀22通电的情况下,所述低流量排放阀22c与辅助排出口30直接连通,这允许次级流路21内的流体通过所述低流量排放阀22离开所述阀门组件10,并且从所述辅助排出口30流出,以将压力完全降低至0psi。一旦所述压力传感器26确定所述次级流路21内的压力已经减小到零,而且脏污或污染的空气重新进入所述阀门组件10的风险已经结束,所述多个排放阀22a和22b可被重新通电,以通过所述多个排放阀22a和22b中的每个将次级流路21重新连接到所述流体出口16。
47.具体地,当所述流体出口16处的压力从例如零压力迅速增加到例如30psi的压力时,所述控制器24指示所述阀驱动器电路28向所述多个填充阀20a
‑
20d和所述多个排放阀22a
‑
22c中的每个施加电压。当每个填充阀20a
‑
20d通电时,允许流体从所述流体入口14流动,并通过每个填充阀20a
‑
20d进入所述阀门组件10。此外,在对每个排放阀22a
‑
22c通电时,所述排放阀22a和22b将被致动以与所述流体出口16而不是所述排出口18连通,并且所述排放阀22c将被致动以停止与所述辅助排出口30连通。
48.所述压力传感器26监视所述流体出口16处的压力。当压力接近期望压力(例如30psi)时,所述控制器24指示所述阀驱动器电路28停止给所述高流量填充阀20a通电(图9)。由于其余的多个填充阀20b
‑
20d仍处于通电状态,因此仍允许流体从所述流体入口14通过所述多个填充阀20b
‑
20d流向所述流体出口16,这使所述阀门组件10能够更缓慢地达到所述期望压力(例如,30psi)。随着压力继续接近所述期望压力,所述控制器24指示所述阀驱动器电路28停止给所述低流量填充阀20b通电(图10)。然而,由于剩余的多个填充阀20c和20d仍被通电,因此流体仍被允许从所述流体入口14通过多个填充阀20c和20d流到所述流体出口16,这使得所述阀门组件10能够甚至更缓慢地达到所述期望压力。随着压力继续接近所述期望压力,所述控制器24指示所述阀驱动器电路28停止给低流量填充阀20c通电(图11)。然而,由于剩余的多个填充阀20d仍被通电,因此流体仍被允许从所述流体入口14通过所述填充阀20d流向所述流体出口16,这使得所述阀门组件10能够更缓慢地达到所述期望压力。然后,一旦压力最终达到所述期望压力,所述控制器24就指示所述阀驱动电路28停止给所述最低流量的填充阀20d通电(图12)。以这种方式,防止或至少基本上最小化了过冲的机会(即,允许压力大于所述期望压力)。
49.另一方面,如果由所述压力传感器26检测到的所述流体出口16处的压力已超出(即大于)所述期望压力(例如,30psi),则所述控制器24可以指示所述阀驱动器电路28使所述较低流量排放阀22c断电(图13),从而允许流体通过辅助排出口30缓慢地离开所述阀门组件10。因为仅所述较低流量排放阀22c被断电,所以流体出口16的压力允许缓慢地降低到所述期望压力。一旦所述控制器24从所述压力传感器26接收到所述流体出口16的压力已达到所述期望压力的信号,所述控制器24就指示所述阀驱动器电路28启动所述低流量排放阀22c(图12)。替代地,如果所述压力传感器26由于使用所述较低流量排放阀22c而检测到所述流体出口16的压力已经降低到低于所述期望压力,则所述控制器24可以指示所述阀驱动器电路28重新给所述最低流量填充阀20d供能,以允许所述流体出口16的压力再次逐渐增加到所述期望压力(图11)。
50.如图12显示说明需要迅速降低所述流体出口16的压力的情况。在这种情况下,所述控制器24可以指示所述阀驱动器电路28,使每个排放阀22b、22c断电,以迅速允许流体通过每个排放阀22b、22c以及所述排出口18、30而离开阀门组件10(图14)。尽管在图14中仅将所述排放阀22b、22c断电以快速降低所述流体出口16的压力,应当理解的是,在不脱离本发明范围的情况下,所有排放阀22a
‑
22c可被断电以降低所述流体出口16的压力。
51.尽管图14的配置可用于快速降低所述流体出口16处的压力,还应当理解的是,当所述流体出口16的压力相对较高(例如,30psi)时,可以使用图14的配置,而且包括所述阀门组件10的系统仅需要以显着降低的压力(例如,15psi)的压力输出流体。在这种情况下,所述排放阀22b、22c或仅所述低流量排放阀22b可被断电,以稳定地减小所述流体出口16的压力。当所述压力传感器26监测压力的降低时,所述低流量排放阀22b可被通电以朝着目标压力(例如,15psi)减缓压力的降低,这仅允许所述较低流量排放阀22c让流体通过所述辅助出口30离开所述阀门组件10(图13)。如果所述压力传感器26检测到的所述流体出口16的压力低于(即小于)目标压力(例如15psi),所述较低流量排放阀22b可以被通电,所述最低流量填充阀20d可以被重新通电(图11),以使压力达到目标压力。
52.根据上述实施例,可以动态地控制从所述阀门组件10输出的压力和流体。换句话说,通过连续使用所述压力传感器26来检测所述流体出口16的压力,可以控制每个填充阀20和每个排放阀22,以增加从所述流体出口16输出的压力,降低从所述流体出口16输出的压力,或维持从所述流体出口16输出的压力。此外,由于使用所述填充阀20b
‑
20d以及所述排放阀22b和22c,可以更严格地控制从所述流体出口16输出的压力,以基本上最小化所述期望压力或目标压力已经过高或过低的情况。另外,如果仅需要很小的压力变化,则可以使用所述填充阀20b
‑
20d以及所述排放阀22b和22c来实现所述期望压力的小变化。此外,应当理解的是,通过使用所述多个填充阀20和所述多个排放阀22,如果所述多个填充阀20和/或所述多个排放阀22之一发生故障,则述阀门组件10尽管能力降低仍然可操作。
53.在每个上述实施例中,应当理解的是,所述控制器24可以嵌入有定制软件,该定制软件被配置为操纵多个填充阀20和多个排放阀22,使得可以针对将使用所述阀门组件10的每个特定应用,来定制所述阀门组件10的性能特征。所述软件具有内置的读/写功能,还可以根据特定的应用程序特征学习和进行更改,从而可以在特定的应用程序中优化阀门组件的性能。
54.更具体地说,由于所述软件具有读/写功能,因此所述软件能够自学有关特定应用所需或必需的各种参数,例如需要输出的流体工作量、任何泄漏、需要流体输出的速度、致动执行器所需的分离力以及执行器的摩擦特性,以优化达到所需压力所需的时间,并最大程度地减小过冲和下冲。所述软件还能够监视工作体积的变化,从而可以针对每个命令目标压力继续优化所述阀门组件10的动力学。
55.现在参考图15至图18,显示说明并入有图7至图14所示的阀回路的示例性阀门组件10。所述阀门组件10包括壳体12、流体入口14、流体出口16,排出口18,次级流路21以及辅助排出口30。如图16最佳所示,所述阀门组件10还包括多个填充阀20a至20d、多个排放阀22a至22c以及控制器24。在图16中,经由螺栓34将所述填充阀20a和20b以及所述排放阀22a和22b附接到所述壳体12的壳体32已经被移除,以揭示所述填充阀20a,20b和所述排放阀22a,22b的结构。所述填充阀20a、20b以及所述排放阀22a、22b是由先导阀36驱动的电磁先
导阀。
56.所述填充阀20a和20b各自包括限定一对阀构件40的活塞38。用于所述填充阀20a和20b的壳体32限定了一个阀孔42(图17和18),所述阀孔包括用于所述阀构件40的阀座44a。当活塞38由所述先导阀36致动时,所述阀构件40将远离所述阀座44a移动,以允许流过所述填充阀20a、20b以对阀门组件10加压。
57.所述排放阀22a和22b还各自包括限定一对阀构件40a和40b的活塞38。用于所述排放阀22a和22b的壳体32限定所述阀孔42,所述阀孔42包括分别用于阀构件40a和40b的一对阀座44b和44c。所述排放阀22a和22b包括一对阀构件40a、40b和一对阀座44b、44c,因为如上所述,所述排放阀22a、22b在未通电时与所述排出口18连通,并在通电时建立次级流路21与所述流体出口16的连接。当活塞38由先导阀36致动(即被通电)时,所述阀构件40b将远离阀座44c移动,并且所述阀构件40c将与所述阀座44b接合以防止流至所述排出18,并允许流经所述排放阀22a、22b而增压所述流体出口16。
58.所述填充阀20c、20d和所述排放阀22c是电磁致动阀。每个填充阀20c、20d和所述排出阀22c均包括阀杆46,所述阀杆46限定了位于所述壳体12中形成的阀孔50内的阀构件48。所述阀孔50与通道(未绘示)连通,在所述填充阀20c、20d的情况下,所述通道与所述流体入口14和所述流体出口16连通。所述排放阀22c的阀孔50与次级流路21和辅助排出口30连通。当所述填充阀20c、20d中的每一个被通电时,所述阀构件48将解除阻塞所述流体入口14,并且允许与所述次级流路21的所述流体出口16连通。当所述填充阀22c被通电时被阻塞。
59.为了说明和描述的目的,已经提供了实施例的前述描述。主要不是在穷尽或限制本发明。特定实施例的各个元件或特征通常不限于特定实施例,而是在适用的情况下是可互换的,并且即使未具体示出或描述也可以在选定的实施例中使用。同样也可以有许多方式变化。这样的变化不应被认为是背离本发明,并且所有这样的修改主要被包括在本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。