1.本发明涉及一种作为半导体制造装置、平板显示器制造装置、太阳能电池板制造装置中的处理腔室、其他的真空腔室的气体排气机构而被利用的真空泵,特别地,涉及一种适于确保包含多个旋转叶片以及粒子输送部的旋转体整体的平衡并且防止从真空泵向真空腔室侧的粒子的回流的真空泵。
背景技术:
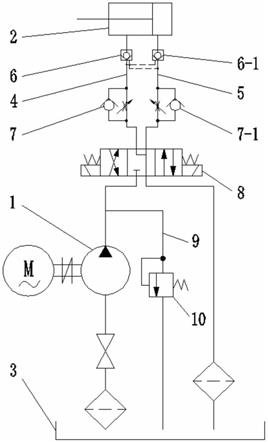
2.涡轮分子泵和螺纹槽式泵等的真空泵多被用于需要高真空的真空腔室的排气。图22是作为真空腔室的气体排气机构而采用以往的真空泵的排气系统的概要图。
3.构成图22的排气系统的以往的真空泵z在从吸气口2到排气口3之间具有将气体分子进行排气的多个排气段pt。
4.以往的真空泵z中的各排气段pt为如下的结构:利用在每个排气段pt放射状地以既定间隔配置的多个旋转叶片7和固定叶片8将气体分子排气。
5.在如前所述的气体分子的排气结构中,旋转叶片7一体地形成于被磁性轴承等的轴承机构能够旋转地支承的转子6的外周面,并且与转子6一起以高速旋转。另一方面,固定叶片8被固定于外壳1的内表面。
6.在图22的排气系统中,在真空腔室ch内进行cvd等的化学处理,由此附带地生成的微粒状的处理副生成物在真空腔室ch内浮游/扩散,利用自重、基于气体分子的输送效果而向真空泵z的吸气口2落下。此外,推想附着/堆积于真空腔室ch的内壁面的堆积物、附着/堆积于压力调整阀bl的堆积物等也由于振动等剥落而由于自重向真空泵z的吸气口2落下。
7.并且,由于如前所述的落下而到达吸气口2的粒子从吸气口2进一步落下,射入至最上段的排气段pt(pt1)。若射入的粒子pa与以高速旋转的该排气段pt(pt1)的旋转叶片7碰撞,则碰撞后的粒子由于与旋转叶片7的位于上端面侧的叶片边缘部的碰撞而被弹开,向吸气口2方向弹回而回流,存在由于这样的回流的粒子而真空腔室ch内被污染的问题。
8.专利文献1公开有防止如前所述的粒子的回流的机构(以下称为“粒子回流防止机构”)。即,该文献1的真空泵在从吸气口到排气口之间具有将气体分子进行排气多个排气段,并且在该多个排气段中最上段的排气段,作为粒子回流防止机构而具备粒子输送部(在该文献1中称为粒子输送段)。
9.该粒子输送部为,在构成最上段的排气段的多个旋转叶片中将至少一部分的旋转叶片的上游端的高度增高或降低,由此作为最上段的排气段整体成为上游端的高度不同的阶差结构,从而能够将粒子向气体分子的排气方向输送。
10.然而,在如之前说明的专利文献1那样的粒子回流防止机构中存在下述问题:存在由于阶差结构而上游端的高度比其他的旋转叶片高的旋转叶片,由于该存在而旋转体整体(由多个旋转叶片以及粒子输送部和支承该多个旋转叶片的圆筒部构成)的平衡被破坏、在真空泵的运转中产生振动等、对真空泵的运转产生障碍。
11.专利文献1 : wo2018/174013。
技术实现要素:
12.本发明是为了解决前述问题而提出的,其目的在于提供一种真空泵,其适于确保包含多个旋转叶片以及粒子输送部的旋转体整体的平衡并且防止从真空泵向真空腔室侧的粒子的回流。
13.为了达到前述目的,本发明是一种真空泵,在从吸气口到排气口之间具有将气体分子排气的多个排气段,在前述多个排气段中,具备粒子输送部,所述粒子输送部为,在构成最上段的排气段的多个旋转叶片中将至少一部分的上游端的高度增高或降低,由此作为前述最上段的排气段整体成为前述上游端的高度不同的阶差结构,从而将粒子向前述气体分子的排气方向输送,其特征在于,由前述多个旋转叶片以及前述粒子输送部、支承该多个旋转叶片的圆筒部构成的旋转体为,针对该旋转体整体,修正由于前述阶差结构从而前述上游端的高度变得比其他的旋转叶片高的旋转叶片的存在而产生的不平衡。
14.在前述本发明中,其特征也可以在于,去除由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的一部分,从而修正前述不平衡。
15.在前述本发明中,其特征也可以在于,将由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的叶片表面整体中对于前述气体分子的排气的贡献较少的旋转方向的背面侧去除既定量,从而修正前述不平衡。
16.在前述本发明中,其特征也可以在于,将由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的下游端缘去除既定量,从而修正前述不平衡。
17.在前述本发明中,其特征也可以在于,在由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片上设置孔,从而修正前述不平衡。
18.在前述本发明中,其特征也可以在于,在由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片上形成槽,从而修正前述不平衡。
19.在前述本发明中,其特征也可以在于,将由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的径向长度设定为比它们之外的前述其他的旋转叶片的径向长度短,从而修正前述不平衡。
20.在前述本发明中,其特征也可以在于,将与由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片接近的旋转叶片的上游端去除既定量,从而修正前述不平衡。
21.在前述本发明中,其特征也可以在于,对位于由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的相对于旋转中心相反侧的旋转叶片附加质量,从而修正前述不平衡。
22.在前述本发明中,其特征也可以在于,位于由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的相对于旋转中心相反侧的旋转叶片的下游端缘比它们之外的前述其他的旋转叶片更长地
延伸,从而修正前述不平衡。
23.在前述本发明中,其特征也可以在于,将位于由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的相对于旋转中心相反侧的旋转叶片的径向长度设定为比它们之外的前述其他的旋转叶片的径向长度更长,从而修正前述不平衡。
24.在前述本发明中,其特征也可以在于,令位于由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片或者与前述旋转叶片接近的旋转叶片的相对于旋转中心相反侧的旋转叶片的厚度比它们之外的旋转叶片增加,从而修正前述不平衡。
25.在前述本发明中,其特征也可以在于,从前述旋转体的旋转中心观察,位于与由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片同侧的至少两个以上的旋转叶片的配置间隔被设定为比它们之外的旋转叶片的配置间隔大,从而修正前述不平衡。
26.在前述本发明中,其特征也可以在于,从前述旋转体的旋转中心观察,位于与由于前述阶差结构而前述上游端的高度变得比前述其他的旋转叶片高的前述旋转叶片相反侧的至少两个以上的旋转叶片的配置间隔被设定为比它们之外的旋转叶片的配置间隔窄,从而修正前述不平衡。
27.在前述本发明中,其特征也可以在于,利用前述最上段的排气段以外的排气段来修正前述不平衡。
28.在前述本发明中,其特征也可以在于,在前述圆筒部的外周面附加凹部或者凸部,从而修正前述不平衡。
29.在前述本发明中,其特征也可以在于,切去用于前述旋转体与该旋转体的旋转轴的紧固的垫圈的一部分,从而修正前述不平衡。
30.此外,本发明是一种真空泵的旋转体,所述真空泵在从吸气口到排气口之间具有将气体分子排气的多个排气段,在前述多个排气段中具备粒子输送部,所述粒子输送部为,在构成最上段的排气段的多个旋转叶片中将至少一部分的上游端的高度增高或降低,由此作为前述最上段的排气段整体成为前述上游端的高度不同的阶差结构,从而将粒子向前述气体分子的排气方向输送,其特征在于,由前述多个旋转叶片以及前述粒子输送部、支承该多个旋转叶片的圆筒部构成的前述旋转体为,针对该旋转体整体,修正由于前述阶差结构从而前述上游端的高度变得比其他的旋转叶片高的旋转叶片的存在而产生的不平衡。
31.进而,本发明是一种真空泵,在从吸气口到排气口之间具备将气体分子排气的多个排气段、将粒子向前述气体分子的排气方向输送的粒子输送部,其特征在于,由前述多个排气段以及前述粒子输送部、支承该多个排气段的圆筒部构成的旋转体为,针对该旋转体整体,修正由于前述粒子输送部的设置而产生的不平衡。
32.根据本发明,从真空腔室向真空泵的吸气口落下的粒子借助阶差结构的粒子输送部被向气体分子的排气方向输送,以及,修正由于阶差结构而上游端的高度变得比其他的旋转叶片高的旋转叶片的存在导致的旋转体整体的不平衡或者粒子输送部的设置导致的旋转体整体的不平衡,所以能够提供一种真空泵,其适于确保旋转体整体的平衡、并且防止从真空泵向真空腔室侧的粒子的回流。
附图说明
33.图1是应用了本发明的真空泵的剖视图。
34.图2(a)是从转子的外周面侧观察图1的真空泵中的粒子输送部的状态的说明图,图2(b)是图2(a)的a向视图、图2(c)是图2(a)的b向视图。
35.图3是在不具备粒子输送部的真空泵中落下的粒子的碰撞可能区域的说明图。
36.图4是在具备粒子输送部的图1的真空泵中落下的粒子的碰撞可能区域的说明图。
37.图5是修正不平衡前的旋转体的俯视图。
38.图6是旋转体整体的不平衡修正的基本的思考方式的说明图。
39.图7是第一不平衡修正结构的说明图。
40.图8是第一不平衡修正结构的说明图。
41.图9是第一不平衡修正结构的说明图。
42.图10是第一不平衡修正结构的说明图。
43.图11是第一不平衡修正结构的说明图。
44.图12是第一不平衡修正结构的说明图。
45.图13是应用了图12的第一不平衡修正结构的旋转体的俯视图。
46.图14是第二不平衡修正结构的说明图。
47.图15是第二不平衡修正结构的说明图。
48.图16是第三不平衡修正结构的说明图。
49.图17是第三不平衡修正结构的说明图。
50.图18是第四不平衡修正结构的说明图。
51.图19是第六不平衡修正结构的说明图。
52.图20是第六不平衡修正结构的说明图。
53.图21是第七不平衡修正结构的说明图,(a)是具备垫圈的旋转体的剖视图、(b)是该垫圈的平面图。
54.图22是作为真空腔室的气体排气机构采用以往的真空泵的排气系统的概要图。
具体实施方式
55.以下,参照附图对为了实施本发明的最优方式进行详细地说明。
56.在本实施方式中,作为真空泵的一例,对具备由多个排气段构成的涡轮分子泵部和螺纹槽排气段的所谓复合叶片式真空泵进行说明,但本实施方式也可以应用于仅有涡轮分子泵部的真空泵。
57.图1是应用了本发明的真空泵的剖视图。
58.若参照图1,则该图的真空泵p1具备:截面筒状的外壳1、配置于外壳1内的圆筒部6(转子)、能够旋转地支承圆筒部6的支承机构、旋转驱动圆筒部6的驱动机构。
59.外壳1呈有底圆筒形,利用紧固螺栓将筒状的泵壳1a和有底筒状的泵基座1b沿其筒轴方向一体地连结,泵壳1a的上端部侧作为用于将气体吸气的吸气口2而开口,此外,在泵基座1b的下端部侧面设置有用于向外壳1外将气体排气的排气口3。
60.吸气口2经由压力调整阀bl(参照图22)连接至半导体制造装置的处理腔室等那样的成为高真空的真空腔室ch(参照图22)。排气口3连通连接于未图示的辅助泵。
61.在泵壳1a内的中央部设置有内置各种电装品的圆筒状的定子柱4。在图1的真空泵p1中,定子柱4形成为与泵基座1b分体的部件并螺纹固定于泵基座1b的内底,从而将定子柱4立设于泵基座1b上,但作为此外的其他实施方式,也可以将该定子柱4一体地立设于泵基座1b的内底。
62.在定子柱4的外侧设置有前述的圆筒部6。圆筒部6被内包于泵壳1a以及泵基座1b,并且呈包围定子柱4的外周的圆筒形状。
63.在定子柱4的内侧设置有旋转轴5(转子轴)。旋转轴5配置为其上端部朝向吸气口2的方向、其下端部朝向泵基座1b的方向。此外,旋转轴5被磁性轴承(具体地,公知的两组径向磁性轴承mb1和一组轴向磁性轴承mb2)能够旋转地支承。进而,在定子柱4的内侧设置有驱动马达mo,利用该驱动马达mo,旋转轴5绕其轴心被旋转驱动。
64.旋转轴5的上端部从定子柱4的圆筒上端面向上方突出,圆筒部6的上端侧相对于该突出的旋转轴5的上端部被螺栓等的紧固机构一体地固定。因而,圆筒部6经由旋转轴5被磁性轴承(径向磁性轴承mb1、轴向磁性轴承mb2)能够旋转地支承,此外,若在该支承状态下启动驱动马达mo,则圆筒部6能够与旋转轴5一体地绕其旋转轴心旋转。简而言之,在图1的真空泵p1中,旋转轴5和磁性轴承作为能够旋转地支承圆筒部6的支承机构而起作用,此外,驱动马达mo作为旋转驱动圆筒部6的驱动机构而起作用。
65.并且,图1的真空泵p1在从吸气口2到排气口3之间具备将气体分子排气的多个排气段pt。
66.此外,在图1的真空泵p1中,在多个排气段pt的下游部,具体地在多个排气段pt中从最下段的排气段pt(ptn)到排气口3之间,设置有螺纹槽泵段ps。
67.前述多个排气段pt中,最上段的排气段pt(pt1)还具备将粒子向气体分子的排气方向输送的粒子输送部pn。
68.《排气段的详细说明》图1的真空泵p1的比圆筒部6的大致中间靠上游作为多个排气段pt而起作用。以下,详细地说明多个排气段pt。
69.在比圆筒部6的大致中间靠上游的圆筒部6外周面设置有与圆筒部6一体地旋转的多个旋转叶片7,这些旋转叶片7在每个排气段pt(pt1、pt2、
…
ptn)以圆筒部6的旋转中心轴(具体地旋转轴5的轴心)或者外壳1的轴心(以下称为“真空泵轴心”)为中心被放射状地以既定间隔配置。
70.另一方面,在泵壳1a的内周侧设置有多个固定叶片8,这些固定叶片8也与旋转叶片7同样的在每个排气段pt(pt1、pt2、
…
ptn)以真空泵轴心为中心放射状地以既定间隔配置。
71.即,图1的真空泵p1中的各排气段pt(pt1、pt2、
…
、ptn)为,在每个排气段pt(pt1、pt2、
…
ptn)具备放射状地以既定间隔配置的多个旋转叶片7和固定叶片8,由此形成将气体分子排气的气体排气结构。
72.任意旋转叶片7都是与圆筒部6的外径加工部一体地利用切削加工而切出形成的叶片状的切削加工品,以最适于气体分子的排气的角度倾斜。任意固定叶片8也以最适于气体分子的排气的角度倾斜。
73.《基于多个排气段的排气动作说明》
在由以上的结构构成的多个排气段pt中,在最上段的排气段pt(pt1),借助驱动马达mo的启动,多个旋转叶片7与旋转轴5以及圆筒部6一体地以高速旋转,利用旋转叶片7的朝向旋转方向前面且下方(从吸气口2朝向排气口3的方向、以下简称为向下)的倾斜表面对从吸气口2射入的气体分子赋予向下方且切线方向的动量。该具有向下方的动量的气体分子被设置于固定叶片8的与旋转叶片7的旋转方向相反方向的向下的倾斜表面送入至下一个排气段pt(pt2)。此外,在下一个排气段pt(pt2)以及其后的排气段pt,与最上段的排气段pt(pt1)同样地,旋转叶片7旋转,进行上述那样的基于前述的旋转叶片7的向气体分子的动量赋予和基于固定叶片8的气体分子的送入动作,从而吸气口2附近的气体分子以朝向圆筒部6的下游而依次移动的方式被排气。
74.《螺纹槽泵段的详细说明》在图1的真空泵p1中,构成为比圆筒部6的大致中间靠下游作为螺纹槽泵段ps而起作用。以下,详细地说明螺纹槽泵段ps。
75.螺纹槽泵段ps为,在圆筒部6的外周侧(具体地,比圆筒部6的大致中间靠下游的圆筒部6部分的外周侧)作为形成螺纹槽排气流路r的机构而具有螺纹槽排气部定子9,该螺纹槽排气部定子9作为固定部件而安装于外壳1的内周侧。
76.螺纹槽排气部定子9是被配置为其内周面与圆筒部6的外周面对置的圆筒形的固定部件,以包围圆筒部6的比大致中间靠下游的圆筒部6部分的方式配置。
77.并且,圆筒部6的比大致中间靠下游的圆筒部6部分是作为螺纹槽排气部ps的旋转部件而旋转的部分,经由既定的空隙而被插入/收容于螺纹槽排气部定子9的内侧。
78.在螺纹槽排气部定子9的内周部形成有深度朝向下方而小径化的锥形状地变化的螺纹槽91。该螺纹槽91从螺纹槽排气部定子9的上端直到下端螺旋状地刻设。
79.借助具备前述这样的螺纹槽91的螺纹槽排气部定子9,在圆筒部6的外周侧形成用于气体排气的螺纹槽排气流路r。另外,省略图示,但也可以是将之前说明的螺纹槽91形成于圆筒部6的外周面从而设置前述这样的螺纹槽排气流路r。
80.在螺纹槽排气部ps中,为了借助螺纹槽91和圆筒部6的外周面处的拖拽效果而将气体一边压缩一边输送,螺纹槽91的深度设定为在螺纹槽排气流路r的上游入口侧(靠近吸气口2的流路开口端)处最深,在其下游出口侧(靠近排气口3的流路开口端)处最浅。
81.螺纹槽排气流路r的入口(上游开口端)朝向构成最下段的排气段ptn的固定叶片8e和螺纹槽排气部定子9之间的间隙(以下称为“最终间隙ge”)开口。此外,该螺纹槽排气流路r的出口(下游开口端)通过泵内排气口侧流路s而连通至排气口3。
82.泵内排气口侧流路s通过在圆筒部6、螺纹槽排气部定子9的下端部与泵基座1b的内底部之间设置既定的间隙(在图1的真空泵p1中,绕定子柱4的下部外周一周的形态的间隙)而形成为从螺纹槽排气流路r的出口直到排气口3。
83.《螺纹槽排气部的排气动作说明》利用基于之前说明的多个排气段pt的排气动作的输送而到达前述的最终间隙ge的气体分子移动至螺纹槽排气流路r。移动的气体分子通过由于圆筒部6的旋转而产生的拖拽效果,一边从过渡流被压缩为粘性流一边朝向泵内排气口侧流路s移动。并且,到达泵内排气口侧流路s后的气体分子流入至排气口3,通过未图示的補助泵被向外壳1之外排气。
84.《粒子输送部的说明》
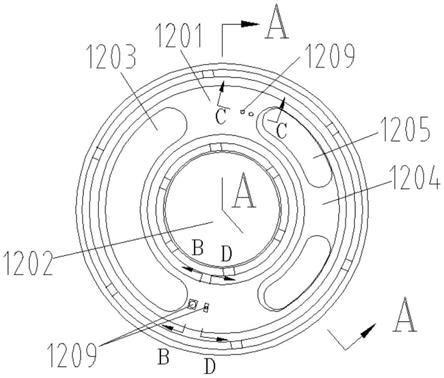
图2(a)是从圆筒部的外周面侧观察图1的真空泵中的最上段的排气段(包含粒子输送部)的状态的说明图,图2(b)是图2(a)的a向视图,图2(c)是图2(a)的b向视图。
85.若参照图2(a),则粒子输送部pn构成为在构成最上段的排气段pt(pt1)的多个旋转叶片7中将至少一部分的旋转叶片7(71、74)的上游端7a的高度增高或降低,由此作为最上段的排气段pt(pt1)整体成为上游端7a的高度不同的阶差结构,从而能够将粒子向气体分子的排气方向输送。
86.在图2(a)的例子中,示出位于两片旋转叶片72、73的两侧的两片旋转叶片71、74的上游端7a比其他的旋转叶片72、73、75的上游端7a高的结构,但不被限定于此。上游端7a高的旋转叶片和位于其间的旋转叶片的片数,能够根据需要适当增减,上游端7a高的旋转叶片也可以是一片。
87.以下,为了便于说明,在构成最上段的排气段pt(pt1)的多个旋转叶片7中,将由于前述阶差结构而上游端的高度变高的部分称为“叶片高部nb”。
88.若参照图22,则推想由于真空腔室ch内的化学处理而附带地生成的微粒状的处理副生成物在真空腔室ch内浮游/扩散,由于自重及基于气体分子的输送效果而向真空泵p1的吸气口2落下。进而,推想附着堆积于真空腔室ch的内壁面的堆积物和附着堆积于压力调整阀bl的堆积物等也由于振动等剥落,由于自重而向真空泵p1的吸气口2落下。
89.若参照图2(a),则借助前述落下而来到吸气口2的粒子pa从吸气口2进一步落下,首先射入至粒子输送部pn,与叶片高部nb碰撞。
90.与叶片高部nb碰撞的多个粒子若以碰撞后的粒子行进方向进行区分,则能够大致分为排气方向反射粒子和回流粒子。排气方向反射粒子是利用与位于基于叶片高部nb的旋转的行进方向前侧的该叶片高部nb的倾斜表面fs(以下称为“叶片高部前倾斜表面fs”)的碰撞而向气体分子排气方向反射的粒子。回流粒子是向吸气口2方向反弹的粒子。
91.在最上段的排气段pt(pt1)中,具备粒子输送部pn,由此排气方向反射粒子的比例增加,回流粒子的比例减少。其理由如下述的《考察》所述。
92.《考察》图3是在不具备粒子输送部的真空泵中落下的粒子的碰撞可能区域的说明图,图4是在具备粒子输送部的图1的真空泵中落下的粒子的碰撞可能区域的说明图。
93.若参照图3,则在不具备粒子输送部的真空泵的情况下,在最上段的排气段p(pt1)的直径d部(参照图2(c))中的粒子的碰撞可能区域zp1由下式(3)求得。zp1={(πd/n-t)vp}/(vr)
…
式(3)n:构成最上段的排气段的旋转叶片7的片数d:直径d部的尺寸(参照图2(c))t:构成最上段的排气段的旋转叶片7的直径d部的轴直角厚度(参照图2(c))vp:粒子的落下速度vr:旋转叶片7的直径d部的旋转速度(周速度)。
94.若参照图4,则前述阶差结构中的阶差的高度(突出高度)zp2基于下式(4)被特定。
95.下式(4)是对将图2(a)中的两片旋转叶片72、73如图3那样地作为n片旋转叶片7、7
…
而考虑,位于n片旋转叶片7、7的两侧的旋转叶片71、74的上游端7a比其他的旋转叶片(71、74之外)的上游端高的阶差结构而应用的式子。
zp2={(πd/n/n)vp}/(vr)
…
式(4)n:位于上游端高的旋转叶片71、74之间的旋转叶片的片数d:直径d部的尺寸(参照图2(c))n:构成最上段的排气段的旋转叶片7的片数vp:粒子pa的落下速度vr:旋转叶片7的直径d部的旋转速度(周速度)。
96.在图2(c)的直径d部中,若将n片旋转叶片7和位于其两侧的旋转叶片7(71、74)的阶差如图4那样设为zp2以上,则落下至附图标记71和74的旋转叶片间的空间(在图2中相当于l2)的粒子不与n片旋转叶片7碰撞,而与附图标记74的旋转叶片的前表面碰撞。并且,向附图标记74的旋转叶片的前表面的粒子的碰撞可能区域由基于下式(5)的后述的zp3特定。
97.在该考察中,认为在最上段的排气段pt(pt1)中存在上游端高出叶片高部nb的高度zp2的量的旋转叶片。
98.在这样考虑的情况下,在最上段的排气段pt(pt1)的直径d部(参照图2(c))的粒子的碰撞可能区域zp3(参照图4)基于下式(5)被特定。zp3=[{πd(n+1)/n-t)}vp]/(vr)
…
式(5)n:构成最上段的排气段的旋转叶片7的片数d:直径d部的尺寸(图2(c)参照)t:构成最上段的排气段的旋转叶片7的直径d部的轴直角厚度(参照图2(c))vp:粒子的落下速度vr:旋转叶片7的直径d部的旋转速度(周速度)n:位于上游端高的旋转叶片71、74之间的旋转叶片的片数。
99.若参照图4,则从旋转叶片7观察到的粒子的相对速度vc从直径d部(参照图2)的旋转叶片7的旋转速度vr和粒子的落下速度vp求得。在图4中,若将上游端高的旋转叶片7(71、74)的间隔乃至区间设为叶片间隔l’,则从图4的a地点射入的粒子(在叶片间隔l’内能够射入(落下)到最下游侧的粒子)在叶片间隔l’的范围内落下至位于旋转叶片7(74)顶端的延长线上的b’地点。从旋转叶片7(74)的上端面7a到b’地点的落下距离为由上式(5)求得的zp3。在具备叶片高部nb的图1的真空泵(相当于本发明的真空泵)中,在该zp3的范围内没有倒角等的叶片表面,因此落下至b’地点的粒子能够进一步落下,最终与旋转叶片7(74)的前表面、具体地与该旋转叶片7(74)的向下倾斜表面中的c’地点碰撞。
100.从以上的说明可知,在具备粒子输送部pn的图1的真空泵中,从旋转叶片7(74)的上端面7a到c’地点的粒子的落下距离zp4成为该粒子的碰撞可能区域,该碰撞可能区域(落下距离zp4)比从上式(5)获得的碰撞可能区域zp3大。
101.简而言之,若将基于前述阶差结构的阶差的高度设为zp2,则从图4的a点射入的粒子与b点碰撞,但若将这样的阶差设为zp2以上,则该粒子不与n片旋转叶片7碰撞而与旋转叶片7(74)的前表面(例如,旋转叶片7(74)的向下倾斜表面中的c’地点)碰撞。
102.在此,比较探讨上式(3)和上式(5)。此时,若为简便起见忽略上式(3)和上式(5)中的旋转叶片7的厚度t来考虑,则如上所述地采用阶差高度为zp2以上的阶差结构的情况下,即,上式(5)的情况下,与上式(3)的情况相比,粒子pa的碰撞可能区域被扩大为(n+1)倍,因此排气方向反射粒子的比例增加,回流粒子的比例减少。其理由简而言之是因为若粒子
的碰撞可能区域扩大,则与旋转叶片7和叶片nb中朝向气体分子排气方向而倾斜的倾斜表面碰撞而向气体分子排气方向反射的概率比与向吸气口2方向回流的概率较高的表面碰撞的概率更有优势。
103.《修正旋转体整体的不平衡的结构的说明》在图1的真空泵p1中,由多个旋转叶片7以及粒子输送部pn、支承该多个旋转叶片7的圆筒部6构成旋转体r,以将该旋转体r的旋转轴5作为点对称象轴而成为点对称的方式设置有叶片高部nb,所以获得旋转体r整体的平衡。即,旋转体r整体以旋转轴5作为中心而旋转对称。
104.但是,前述的回流粒子的比例減少这一粒子输送部pn的作用效果,即使由于前述阶差结构而上游端7a的高度高的旋转叶片7(74)(以下称为“高叶片7(74)”)为一片时也能充分发挥。但是,该情况时由于高叶片7(74)的存在(具体地,叶片高部nb的质量)而旋转体r整体不能成为以旋转轴5作为中心的旋转对称,对于旋转体r整体产生不平衡。此外,这样的高叶片为多个的情况下,只要多个高叶片没有以旋转体r的旋转轴5作为点对称象轴而成为点对称,旋转体整体r的不平衡也会产生。
105.图5是修正不平衡前的旋转体的俯视图,图6是旋转体整体的不平衡修正的基本的思考方式的说明图。
106.图6中的附图标记“m”示出除了叶片高部nb外的旋转体r整体的质量,附图标记“m”示出叶片高部nb的质量,附图标记“o”示出旋转体r的旋转中心,附图标记“g”示出包含叶片高部nb的旋转体r整体的重心,附图标记“e”示出从该重心到前述旋转体的旋转中心的距离。此外,附图标记“r”示出从前述旋转体的旋转中心o到叶片高部nb单体的重心的距离,附图标记“ω”示出旋转体r的旋转角速度,附图标记“f”示出基于叶片高部nb的质量增加而产生的离心力。该离心力f能够用m
∙
r
∙
ω2表示。
107.旋转体r整体的不平衡的修正的基本的思考方式是考虑前述离心力f(=m
∙
r
∙
ω2)而设定旋转体r整体的平衡。
108.在图1的真空泵p1中产生旋转体r整体的不平衡的情况下,考虑前述离心力f,能够采用后述的第一至第七不平衡修正结构。另外,第一至第七不平衡修正结构可以分别独立地使用,也可以组合使用。
109.《第一不平衡修正结构的说明》第一不平衡修正结构是去除高叶片7(74)或者与其接近的旋转叶片(73、75)的一部分,从而修正前述不平衡。
110.前述一部分的去除,如图7、图8所示,可以在高叶片7(74)的叶片表面整体中将对气体分子的排气的贡献较少的旋转方向的背面7b侧去除既定量。此外,也可以将接近高叶片7(74)的旋转叶片的背面侧去除既定量。
111.在图7、图8的例子中,背面7b以成为圆弧面的方式被削去,但不被限定于此。此外,背面7b的削去量和削去位置能够根据需要适当变更。背面7b的削去范围可以如图8所示地包含叶片高部nb,也可以如图7所示地不包含叶片高部nb。
112.前述一部分的去除可以如图9所示,将高叶片7(74)的下游端缘7c去除既定量。此外,也可以将接近高叶片7(74)的旋转叶片的下游端缘7c切除既定量。
113.在图9的例子中,将高叶片7(74)的下游端缘7c去除叶片高部nb的长度的量,但该
去除量能够根据需要适当变更。
114.前述一部分的去除可以如图10所示,是在高叶片7(74)设置孔h。此外,也可以是在接近高叶片7(74)的旋转叶片设置孔。
115.在图10的例子中,沿着从旋转叶片7(74)的上游端7a向下游端7c的方向以既定间隔形成多个孔h(具体地,非贯通孔),但不被限定于此。例如,孔h可以沿高叶片(74)的径向(与圆筒部6的径向相同的方向。以下相同)设置多个。孔h的个数、形成位置能够根据需要适当变更。这些点当在接近高叶片7(74)的旋转叶片上设置孔时也是同样的。
116.前述一部分的去除也可以如图11所示,是在高叶片7(74)上形成槽gr。此外,也可以是在接近高叶片7(74)的旋转叶片上形成槽。
117.在图11的例子中,将沿从高叶片7(74)的上游端7a向下游端缘7c的方向的纵长形状的槽gr形成于高叶片7(74)的背面侧,但不被限定于此。该槽gr的形状、长度、根数能够根据需要适当变更。
118.例如,槽gr也可以沿旋转叶片7(74)的径向而形成为横长形状,也可以将这样的横长形状的槽和前述的纵长形状的槽gr组合使用。这些点当在接近高叶片7(74)的旋转叶片设置槽时也是同样的。
119.进而,省略了图示,但前述一部分的去除,可以是高叶片7(74)或者与其接近的旋转叶片的径向的长度形成为比它们之外的标准的旋转叶片7的径向长度短。在该情况下,使其变短的长度能够根据需要适当变更。
120.此外,前述一部分的去除也可以如图12以及图13所示,是将接近高叶片7(74)的旋转叶片7的上游端7a去除既定量。
121.图13以及图5中的附图标记“h2”示出设置有粒子输送部pn的旋转叶片7(74)的高度,图13中的附图标记“h3”示出接近该旋转叶片7(74)的旋转叶片7(72、73、75)的高度,图13以及图5中的附图标记“h1”分别示出它们之外的标准的旋转叶片的高度。
122.从前述高度的比较(h3<h1<h2)、图13与图15的比较中可知,在图12以及图13的例子中,将接近高叶片7(74)的左右共4片旋转叶片7(72、73、75、76)的上游端7a去除既定量,但不被限定于该例子。切除上游端7a的旋转叶片7的根数和切除的长度能够根据需要适当变更。
123.《第二不平衡修正结构(反平衡)的说明》图14是第二不平衡修正结构(反平衡)的说明图。
124.在第二不平衡修正结构中,如图14所示,对下述旋转叶片附加既定的质量从而修正前述的不平衡,所述旋转叶片是将旋转体r的旋转轴5作为点对称象轴而与高叶片7(74)成为点对称关系的旋转叶片,即,位于高叶片7(74)的相对于旋转中心的相反侧的旋转叶片7(n)或者接近该旋转叶片的旋转叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)。
125.前述既定的质量是用于产生抵消前述的离心力f的离心力(例如,与f大小相同而方向相反的离心力)的质量。以下称为“对应质量”。另外在图14中,对附加对应质量的旋转叶片7标记附图标记(+)。
126.以下,为了便于说明,将位于高叶片7(74)的相对于旋转中心的相反侧的旋转叶片7(n)称为“对称叶片”,将位于该对称叶片7(n)的两侧的多个旋转叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)称为“对称接近叶片”。
127.若参照图14,则因为叶片高部nb的质量m存在于高叶片7(74),所以将对应质量附加于对称叶片7(n),或者将对应质量分配附加于对称接近叶片7(n-2)、7(n-1)、7(n+1)、7(n+2),或者,也可以通过将对应质量分配于对称叶片7(n)和对称接近叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)的双方而修正前述的不平衡。
128.关于附加前述的对应质量的具体的结构,省略了图示,但可以使用下述的结构,也可以将这些结构组合使用:作为第一结构例,对称叶片7(n)或者对称接近叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)的下游端缘7c比它们之外的旋转叶片7伸长的结构,作为第二结构例,将对称叶片7(n)或者对称接近叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)的径向长度设定为比它们之外的旋转叶片7长的结构,作为第三结构例,令对称叶片7(n)或者对称接近叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)的厚度比它们之外的旋转叶片7增加的结构。
129.如图14所示,在将对应质量分配附加于对称叶片7(n)和对称接近叶片7(n
‐
2)、7(n
‐
1)、7(n+1)、7(n+2)的情况下,如例如图15所示,也可以采用在不超过高叶片7(74)的高度h2的范围内对称叶片7(n)和对称接近叶片7(n-2)、7(n-1)、7(n+1)、7(n+2)的上游端7a的高度如例如下式(6)或者下式(7)所示地增减的结构。
130.另外,为了便于说明,下式(6)利用附加于各叶片的附图标记来比较叶片高,下式(7)利用示出各叶片的高度的附图标记来比较叶片高,这两个式子表示相同的意思。
131.7(75)<{7(n 2)=7(n
‑
2)},{7(n 1)=7(n
‑
1)},7(n)<7(74)
…
式(6)h1<{h1=h5},{h2=h4},h3<h2
…
式(7)。
132.在图15中,作为上式(7)的具体例子,示出7(75)<{7(n 2)=7(n
‑
2)}<{7(n 1)=7(n
‑
1)}<7(74),作为上式(6)的具体例子,示出h1<{h1=h5}<{h2=h4}<h2,但不被限定于此。h1(=h5)和h2(=h4)和h3的大小关系,或者7(n 2)=7(n
‑
2)}和{7(n 1)=7(n
‑
1)}和7(n)的大小关系是任意的,能够根据需要适当变更。
133.《第三不平衡修正结构的说明》第三不平衡修正结构如图16或者图17所示,位于与高叶片7(74)同侧的至少两片以上的旋转叶片的配置间隔被设定为比它们之外的旋转叶片7的配置间隔大,从而修正前述不平衡。
134.若参照图5,在使用第三不平衡修正结构前的旋转体r中,包含高叶片7(74)的所有的旋转叶片7的配置间隔被设定为pi1。
135.另一方面,在图16的例子中,高叶片7(74)和位于其一侧的旋转叶片7(75)的配置间隔pi3被设定为比它们之外的旋转叶片7的配置间隔pi2大,从而修正前述不平衡。
136.此外,在图17的例子中,高叶片7(74)和位于其两侧的旋转叶片7(73、75)的配置间隔pi5被设定为比它们之外的旋转叶片7的配置间隔pi4大,从而修正前述不平衡。
137.《第四不平衡修正结构说的说明(反平衡)》第四不平衡修正结构如图18所示,位于与高叶片7(74)相反侧的至少两片以上的旋转叶片的配置间隔被设定为比它们之外的旋转叶片7的配置间隔窄,从而修正前述不平衡。即,该第四不平衡修正结构为,与高叶片7(74)附近相比,其相反侧一方旋转叶片7的配
置密度大,从而作为相对于高叶片7(74)的反平衡而起作用。
138.在图18中示出了如下的例子:位于与高叶片7(74)相反侧的七片旋转叶片(从7(n+3)到7(n
‐
3))的配置间隔pi6被设定为比它们之外的旋转叶片(例如7(73)、7(76))的配置间隔pi7窄,但不被限定于该例子。配置间隔较窄的旋转叶片的片数能够根据需要适当变更。
139.《第五不平衡修正结构的说明》以上说明的第一至第四不平衡修正结构都是在最上段的排气段pt(pt1)中修正旋转体r整体的不平衡,但不被限定于此。第一不平衡修正结构那样地去除既定的旋转叶片的一部分的结构,第二不平衡修正结构那样地对既定的旋转叶片附加对应质量的结构,第三不平衡修正结构那样地设定旋转叶片的配置间隔的结构,也可以在最上段的排气段pt(pt1)以外的排气段pt(pt1)、pt(pt2)
…
pt(ptn)中使用。
140.《第六不平衡修正结构的说明》第六不平衡修正结构如图19或者图20所示,在圆筒部6的外周面(没有旋转叶片7的面)设置凹部61或者凸部62,从而修正前述的不平衡。
141.在图19的例子中,在最上段的排气段pt(pt1)的下部,具体地在高叶片7(74)的稍下方设置前述凹部61,此外,在图20的例子中,在最上段的排气段pt(pt1)的下部,具体地在对称叶片7(n)的稍下方设置前述凸部62。另外,也可以兼用前述凹部61和前述凸部62从而修正前述的不平衡。
142.前述凹部61和前述凸部62的位置、大小、形状不被限定于图19或者图20的例子,能够根据需要适当变更。例如,该凹部61和凸部62也可以被设置于位于最上段的排气段pt(pt1)以外的排气段的下部,例如从上数第二段或者第三段的排气段pt(pt2)、pt(pt3)的下部(具体地,构成这些排气段pt(pt2)、pt(pt3)的旋转叶片7)的稍下方的圆筒部6的外周面。
143.《第七不平衡修正结构的说明》第七不平衡修正结构如图21所示,刮削用于紧固旋转体r和该旋转体r的旋转轴5的垫圈ws的一部分,从而修正前述的不平衡。
144.在图21的例子中,垫圈ws在其中心部具备旋转轴5的轴插入孔ws1,在该轴插入孔ws1的周围具备多个螺纹插入孔ws2,并且作为整体呈环状形态。并且,在该图21的例子中,在垫圈ws的外周整体中,将靠近高叶片7(74)的根部部分如图中附图标记cc所示地削去,从而修正前述的不平衡,但不被限定于此。将垫圈ws的哪个部分以何种程度削去,在这点上,能够一边观察旋转体r整体的不平衡的修正状况一边根据需要适当变更。
145.以上说明的从第一到第七不平衡修正结构可以单独使用,也可以将它们组合使用。
146.本发明不被限定于以上说明的实施方式,修正旋转体整体的不平衡的技术,例如刮削旋转叶片(去除)的技术,在旋转叶片设置孔或槽的技术、调整旋转叶片的长度的技术、在旋转叶片附加对应质量的技术、调整旋转叶片的配置间隔的技术、利用哪个部件修正不平衡、或进行修正的部件的选择等,能够在本发明的技术思想内由该领域中具有常识的人进行多种变形。
147.附图标记1外壳
2吸气口3排气口4定子柱5旋转轴6圆筒部61凹部62凸部7旋转叶片8固定叶片9螺纹槽排气部定子91螺纹槽bl压力调整阀ch真空腔室cc垫圈部的削去部d旋转叶片的直径fs构成粒子输送部的叶片的前倾斜表面ge最终间隙mb1径向磁性轴承mb2轴向磁性轴承mo驱动马达ms倒角部mc倒角部的上部p1真空泵pa微粒子pn粒子输送部ps螺纹槽泵段pt排气段pt1最上段的排气段ptn最下段的排气段r螺纹槽排气流路s泵内排气口侧流路ws垫圈ws1轴插入孔ws2螺纹插入孔z以往的真空泵。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。