1.本发明涉及机器学习技术领域,主要涉及一种塑料杯表面缺陷检测系统。
背景技术:
2.塑料作为一种与我们生活息息相关的高分子材料,因重量轻、密度小、耐磨性好、绝缘性好、化学性质稳定等众多优点,被广泛应用于建筑、工业、农业和生活的各个领域。其中塑料杯的使用十分广泛,在塑料杯的生产中会产生一些缺陷,及时的检测出有缺陷的塑料杯尤为的关键,这影响着塑料杯的销量和顾客对产品的满意度。
3.随着嵌入式技术的不断发展,处理速度和资源不断提高,嵌入式检测设备相比传统pc控制的大型设备具有价格低、体积小、功耗小的优势,结合机器视觉技术,可以有效的检测塑料杯表面缺陷。
技术实现要素:
4.本发明的具体内容如下:
5.一种塑料杯表面缺陷检测系统,包括摄像头、zynq开发板、lcd屏。通过摄像头读取塑料杯图像,传输给zynq的pl上(zynq的pl部分为可编程逻辑器件),进行图像缺陷分类,最后将结果显示在lcd屏上。
6.在本发明中,图像缺陷检测算法采用bow(视觉词袋) svm(支持向量机)的方式,在图像的特征提取上,采用了fast
‑
suft特征检测与描述算法,fast算法检测速度快,检测的细节多,但并不涉及特征点的特征描述,这时利用suft算法生成特征描述符,两个算法可以互补,同时对fast算法进行改进,加快识别速度。
7.在本发明中,为了进行硬件加速设计,使用xilinx的hls高层综合工具,将图像缺陷检测算法移植到pl端。本发明实现了塑料杯表面缺陷的智能检测,具有良好的准确性和可靠性。
8.本发明的有益效果是,能够快速提取特征点和和描述符,同时将图像缺陷检测算法和zynq完美融合。利用pl并行处理的特点实现算法,节省时间。利用zynq的ps(zynq的ps部分为双a9的arm核)运行操作系统,管理进程调度和资源分配。相比与pc机,功耗低,可靠性高,体积小,成本低,能够准确的检测出缺陷类型的塑料杯。
附图说明
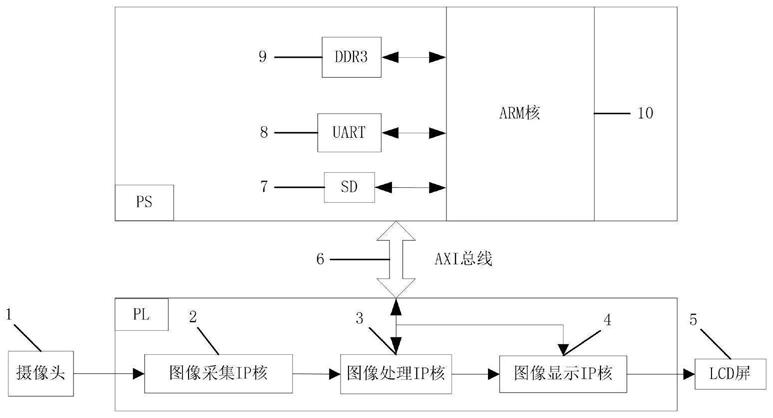
9.附图1为本发明的系统框架图。
10.附图2为本发明的fast特征点提取图。
11.附图3为本发明的pc端算法流程图。
12.附图4为本发明的zynq端算法流程图。
具体实施方式
13.本发明不受下列实施例的限制,可根据本发明的技术方案与实际情况来具体的确定实施方式。
14.结合附图1,具体说明塑料杯表面缺陷检测系统的实施方式。摄像头1通过i2c接口进行寄存器配置,8位的并行数据输出。图像采集ip核2负责将摄像头的图像信息传递给图像处理ip核3。图像处理模块ip核3是由图像缺陷检测算法生成,负责识别出缺陷种类,将结果通过axi总线6传递给ps。ps控制图像显示ip核4将采集到的图像和识别结果通过lcd屏5显示。axi总线6是一种高性能、高带宽、低延迟的片内总线,实现ps和pl信息传递。ddr39为linux操作系统和程序提供运行空间。uart8作为串口输出linux操作系统启动信息。sd7用于存储uboot、linux内核、根文件系统、pl端比特流文件、bow词典和svm分类文件。arm10作为cpu控制整个系统。
15.在图像缺陷检测算法中,视觉词袋bow(bag of visual words,bovw)模型是一种有效的图像表示方法,将图像中的特征点看作视觉单词,则图像就看作由大量无序的单词组成的集合,主要分三个步骤:1.特征提取:提取数据集中每幅图像的特征点,然后提取特征描述符,形成特征数据;2.学习词袋:把处理好的特征数据全部合并,利用聚类把特征词分为若干类,此若干类的数目由自己设定,每一类相当于一个视觉词汇;3.利用视觉词袋量化图像特征:每一张图像由很多视觉词汇组成,我们利用统计的词频直方图,可以表示图像属于哪一类。
16.svm是一种用于分类与回归分析的监督式学习的机器学习算法。通过svm对每类图像的bow词汇进行监督训练,把每张图片的bow描述作为特征向量,将图片所属的类别作为label标签,进而得到用于图像分类的分类器。当把训练器训练好了之后,再对未知的图像进行分类时,先计算每张图片的bag of words,然后去跟训练好的词典去匹配词汇,最后就可以利用训练好的多类分类器对图片进行分类操作。
17.结合附图2,具体说明在fast特征点提取上的算法改进。
18.在特征提取上采用了fast
‑
surf,fast算法检测速度快,检测的细节多,但并不涉及特征点的特征描述,这时利用suft算法生成特征描述符,两个算法可以互补。
19.fast算法改进如下:
20.fast算法以检测中心点p为圆心构造一个半径为3的圆,圆周上的像素点以顺时针方向依次编号为1~16,通过比较p点与圆周上点的灰度值大小来判断该点是否为特征点。
21.假设i(p)、i(x)分别为中心点p和圆周上的任意一点x的灰度值,d为给定阈值,n为满足公式(1)的圆周上像素点x的个数,一般取值为12。
22.对于改进算法,首先检测候选点p周围编号为1、5、9、13位置上的点(间隔90),如果这4个像素点至少有3个满足公式(1),则再判断其他点,如若不满足,则认该候选点不是特征点。
23.附图3是在pc端的图像分类算法训练的流程,目的是生成bow词典和svm分类文本,附图4是在zynq端的图像分类算法实际测试的流程,需要在pc端生成的bow词典和svm分类文本。
24.结合附图3,具体说明在pc端的图像缺陷检测算法训练的流程。
25.步骤a1:输入训练样本数据集;
26.步骤a2:对样本进行fast特征点检测;
27.步骤a3:对样本进行surf确定特征方向、生成特征描述;
28.步骤a4:根据fast
‑
surf对特征点的提取进行k
‑
mean 特征聚类;
29.步骤a5:根据聚类结果构造bow词典,得到训练图片bow模型特征向量;
30.步骤a6:训练svm多分类器;
31.步骤a7:输出svm分类文本。
32.结合附图4,具体说明在zynq端的图像缺陷检测算法实际测试的流程。
33.步骤b1:输入摄像头采集的图像;
34.步骤b2:对图像进行fast特征点检测;
35.步骤b3:对图像进行surf确定特征方向、生成特征描述;
36.步骤b4:根据fast
‑
surf对特征点的提取进行k
‑
mean 特征聚类;
37.步骤b5:根据步骤a5得到的bow词典,得到测试图片bow模型特征向量;
38.步骤b6:根据步骤a7获得的svm分类文本,对bow模型特征向量进行分类;
39.步骤b7:输出缺陷结果。
40.凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种塑料杯表面缺陷检测系统,实施方式如下:摄像头1通过i2c接口进行寄存器配置,8位的并行数据输出。图像采集ip核2负责将摄像头的图像信息传递给图像处理ip核3。图像处理模块ip核3是由图像缺陷检测算法生成,负责识别出缺陷种类,将结果通过axi总线6传递给ps。ps控制图像显示ip核4将采集到的图像和识别结果通过lcd屏5显示。axi总线6是一种高性能、高带宽、低延迟的片内总线,实现ps和pl信息传递。ddr39为linux操作系统和程序提供运行空间。uart8作为串口输出linux操作系统启动信息。sd7用于存储uboot、linux内核、根文件系统、pl端比特流文件、bow词典和svm分类文件。arm10作为cpu控制整个系统。2.根据权利要求1所述的一种塑料杯表面缺陷检测系统,其特征在于:图像缺陷检测算法采用bow(视觉词袋) svm(支持向量机)的方式,在图像的特征提取上,采用了fast
‑
suft特征检测与描述算法,fast算法检测速度快,检测的细节多,但并不涉及特征点的特征描述,这时利用suft算法生成特征描述符,两个算法可以互补,同时对fast算法进行改进,加快识别速度。
技术总结
本发明公开一种塑料杯表面缺陷检测系统。通过摄像头读取塑料杯图像,传输给ZYNQ的PL上(ZYNQ的PL部分为可编程逻辑器件),进行图像缺陷分类,最后将结果显示在LCD屏上。图像缺陷检测算法采用BOW(视觉词袋) SVM(支持向量机)的方式,在图像的特征提取上,本发明采用了FAST
技术研发人员:孙崐 郑凯
受保护的技术使用者:哈尔滨理工大学
技术研发日:2021.07.12
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
