1.本发明属于气动光学、航天科技与信息处理相结合的交叉技术领域,特别是涉及一种面向高速运动物体的红外图像模糊校正方法。
背景技术:
2.气动光学效应是一门交叉学科。搭载了光学成像系统的飞行器在大气中高速飞行时,其头部的光学头罩和大气发生剧烈的相互作用,形成激波、膨胀波、湍流边界层等多种复杂的流场结构,对光学成像探测系统造成气动热、热辐射和光学图像传输干扰效应,引起成像模糊、偏移和抖动,这种效应称为气动光学效应。飞行器速度越高,气动光学效应越严重,光学窗口周围的复杂流场导致光线传输介质折射率具有不均匀性,在光线传输时会造成波前畸变、抖动、偏移等效应,进而会严重降低成像质量,导致光学系统接收到已畸变的模糊图像。因此,研究如何实现机载气动退化图像质量的校正,具有非常重要的价值。
3.传统的数字图像校正算法都是在退化函数已知的情况下进行校正的,即先确定点扩展函数或其参数,然后利用诸如逆滤波和维纳滤波这样的方法恢复图像。但是由气动光学效应引起的复杂流场,其点扩展函数是无法提前预知的,而且是随机变化的,难以确定其光学传递函数,因此目前针对图像的气动光学效应校正技术,主要是利用仅有的先验知识进行盲目卷积算法,缺点是适用性差,自适应能力差,稳定性难以保障,而且一般需要复杂的迭代计算,耗时较长。
技术实现要素:
4.为了克服上述问题,本发明提供了一种面向高速运动物体的红外图像模糊校正方法。
5.本发明所采用的技术方案是:
6.一种面向高速运动物体的红外图像模糊校正方法,包括如下步骤:
7.步骤一:同步获取退化图像及当前退化图像对应的高速运动状态参数;
8.步骤二:根据高速运动状态参数,从退化函数库中选择初始化模糊核;
9.步骤三:对退化图像进行特征显著性区域优选:
10.步骤四:定义基于先验信息约束的气动光学效应校正的最小化代价函数:
11.步骤五:利用金字塔原理求取不同尺度下的模糊核,通过先验模糊核对每层估计结果进行约束,得到图像尺度下的估计模糊核;
12.步骤六:根据估计的退化模糊核,通过非盲图像复原算法,得到校正后的图像;
13.步骤七:评价退化图像与校正图像的质量,当图像质量提升数值大于阈值时,更新先验退化函数库,否则增加步骤五中金字塔求解的迭代次数,重新执行步骤二至步骤六处理过程。
14.其中,步骤二中先验退化函数库的生成方法具体如下:
15.首先通过流体建模、风洞实验的方法,得到典型高速运动状态参数下的气动光学
效应强度参数σ
t
;
16.通过拟合方法,得到强度参数σ
t
与高速运动状态参数的连续映射关系,拟合方法包括多项式拟合、高斯拟合、最小二乘拟合;
17.建立气动光学效应连续退化函数模型:
[0018][0019]
其中,ω
i
为权重参数,σ
t
为强度参数,x
i
和y
i
为偏移量控制参数;
[0020]
设置n组典型高速运动状态参数输入退化函数模型,得到n个退化函数,组成先验退化函数库。
[0021]
其中,步骤二中初始化模糊核选择方法具体如下:
[0022]
读取输入的退化图像所携带的高速运动状态参数,包括速度;
[0023]
通过线性加权求解最小化损失函数或非线性回归的方法,在先验模糊核库中选择最接近的状态参数对应的模糊核。
[0024]
其中,步骤三中图像特征显著性区域优选方法采用基于显著性边缘优选方法,通过计算图像梯度矩阵的局部和,选择局部梯度和最大的图像区域为图像特征显著性区域;或者采用基于crf学习框架下的显著性区域自动选择方法。
[0025]
其中,步骤四中构建基于先验的代价函数的方法为:基于先验知识建立代价函数,将模糊核的估计问题转变成一个求解最优化问题,同时基于稀疏性的特性对图像和模糊核添加正则化约束项。
[0026]
其中,步骤五中先验模糊核约束方法为:利用先验模糊核对模糊核的估计过程添加约束;模糊核先验项为通过l2正则化约束项,保证模糊核估计与先验模糊核之间残差的稀疏性,提高模糊核估计的准确程度。
[0027]
其中,步骤六中非盲图像复原方法为基于lucy的方法或者基于超拉普拉斯先验约束的方法。
[0028]
其中,步骤七中质量评估方法为使用图像质量评价函数,对校正前后的图像进行计算,图像质量评价函数包括psnr、ssim或gmg。
[0029]
其中,步骤七中更新先验退化函数库的方法为线性加权方法,更新的先验退化函数为:
[0030]
psf
i
'=θ1·
psf
i
θ2·
psf
new
[0031]
其中,psf
i
为原始的先验退化函数,psf
new
为当前估计的退化模糊核,参数θ1、θ2分别为两者的权重。
[0032]
本发明的优点如下:
[0033]
1、充分利用先验信息,相比传统的正则化方法,提高了模糊核估计的精度,克服了伪影和振铃问题;
[0034]
2、本发明方法能够针对高速运动状态下的气动光学效应进行实时校正。
附图说明
[0035]
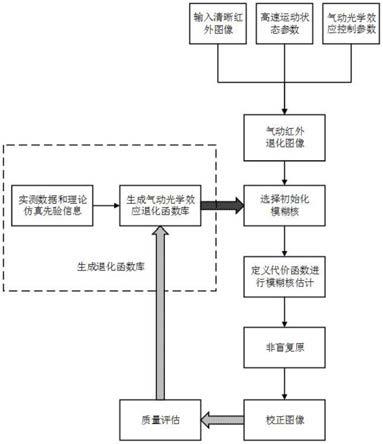
图1是本发明所述一种面向高速运动物体的红外图像模糊校正方法的流程框图。
具体实施方式
[0036]
下面对本发明作进一步的说明,但本发明并不局限于这些内容。
[0037]
实施例
[0038]
前期通过流体建模、风洞实验的方法,得到典型飞行状态下的气动光学效应强度参数;然后通过建立数学模型,得到飞行器飞行参数与退化函数的连续映射关系,获得气动光学效应退化模型,设置一组典型飞行参数输入,得到退化函数库。同步获取退化图像及当前退化图像对应的飞行器飞行参数,其中,根据输入的待处理退化图像对应的飞行器飞行参数,在模糊核库中选择飞行状态最接近的退化函数;同时,对输入的原始退化图像,求取局部梯度和,找出梯度和矩阵最大元素值,在梯度和矩阵中的x、y坐标,同时限制区域坐标值最大不超过图像大小,得到区域坐标;对坐标值进行四舍五入,得到最终显著性区域的四角坐标,根据坐标在原始退化图像中截取出特征显著性区域。对提取出的模糊图像的特征显著性区域,定义基于先验信息约束的气动光学效应校正的最小化代价函数:
[0039][0040]
其中x代表清晰图像,y代表模糊图,k代表点扩散函数psf,γ、α和λ是正则化约束强度参数。第一项是似然项,保持x*k与观测数据y相似性。第二项和第三项是强度先验约束,分别用l2和l0范数正则化项表示,用来保持模糊核和图像的稀疏性。第四项是梯度先验约束,用来保证图像梯度的稀疏性。最后一项是先验模糊约束,模糊核先验项为通过l2正则化约束项,保证模糊核估计与先验模糊核之间残差的稀疏性,提高模糊核估计的准确程度。在迭代过程中,首先建立图像多分辨率金字塔,对模糊核和模糊图像下采样,从分辨率最低的最顶层图像x和模糊核k开始,交替迭代更新x和k。通过先验模糊核对每层估计结果进行约束,得到该层图像尺度下的估计模糊核,利用估计的模糊核k对模糊图像进行复原,对复原后的图像进行上采样,得到多分辨率金字塔下一层的潜在中间图像x,如此迭代下去,直到获得最精细的分辨率层级。根据估计的退化模糊核,通过超拉普拉斯非盲图像复原算法,得到校正后的图像。使用psnr、ssim或gmg等图像质量评价函数,对校正前后的图像进行计算。结果提升大于85%时,按照线性加权方法更新先验退化函数:
[0041]
psf
i
'=θ1·
psf
i
θ2·
psf
new
[0042]
其中,psf
i
为原始的先验退化函数,psf
new
为当前估计的退化模糊核,权重参数θ1、θ2分别设置为0.3和0.7。否则增加迭代次数,重新进行整个校正过程。
[0043]
指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
