1.本发明涉及放射治疗、工业无损检测等核能与核技术应用领域,具体涉及一种射野影像装置的位置校正系统及方法。
背景技术:
2.射野影像装置接受射线照射生成灰度图像,基于灰度图像可以对辐射源、介质进行重建和分析,已广泛应用于放射治疗剂量监测、放射治疗定位摆位、工业无损检测、医学影像重建等领域。由于重力影响,射野影像装置在不同空间位置时会产生一定的位置偏差,导致生成的灰度图像也存在一定的位置偏差,需要对灰度图像进行位置校正,才能够为辐射源、介质重建提供精确的输入信息,因此研究射野影像装置的位置校正方法,对放射治疗监测、工业检测、放射治疗定位摆位、医学影像重建等具有重要意义。
3.目前射野影像装置位置校正一般采用标记点方式,通过使用标记点来获取不同位置处射野影像装置位置校正参数,该方法需要在加速器射野固定位置处粘贴标记点,这样会使得位置校正参数的精度与标记点粘贴精度直接相关,因此有必要发展一种直接基于灰度图像计算射野影像装置位置校正参数的方法。
技术实现要素:
4.发明目的:本发明的目的在于提供一种能够精确地对灰度图像进行位置校正的射野影像装置的位置校正系统及方法。
5.技术方案:本发明的射野影像装置的位置校正系统,包括射线源、射野影像装置模块、位置校正模块以及存储介质,所述射野影像装置模块与射线源保持正对状态;所述位置校正模块包括灰度图像传输模块、灰度图像预处理模块、位置校正参数数据库计算模块、位置校正参数计算模块,其中,灰度图像传输模块将射野影像装置采集的灰度图像从射野影像装置传输到位置校正模块,灰度图像预处理模块对采集的灰度图像进行平滑处理,位置校正参数数据库计算模块根据输入的灰度图像和对应位置计算得到位置校正参数数据库,位置校正参数模块在射线源进行照射时根据获取的射野影像装置位置参数计算得到当前位置的位置校正参数。
6.所述射野影像装置模块中心点垂直线经过射线源点,同时射野影像装置与射线源点之间的距离为固定值。
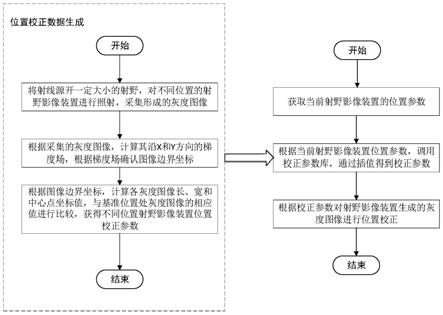
7.本发明还包括一种射野影像装置的位置校正方法,包括以下步骤:
8.(1)建立射野影像装置的位置校正参数数据库;
9.(2)获取当前射野影像装置的位置参数;
10.(3)根据当前射野影像装置位置参数,调用位置校正参数数据库,通过插值得到校正参数;
11.(4)根据校正参数对射野影像装置生成的灰度图像进行位置校正。
12.步骤(1)中,所述建立射野影像装置的位置校正参数数据库包括以下步骤:
13.(1.1)将射线源打开形成射野,对不同位置的射野影像装置进行照射,采集形成的灰度图像;
14.(1.2)计算所采集的灰度图像沿x和y方向的梯度场,根据梯度场确认图像边界坐标;
15.(1.3)根据图像边界坐标计算各灰度图像长、宽和中心点坐标值,并与基准位置处灰度图像的相应值进行比较,获得不同位置射野影像装置位置校正参数。
16.步骤(1.2)中,所述计算所采集的灰度图像沿x和y方向的梯度场,根据梯度场确认图像边界坐标,具体包括以下步骤:
17.(1.2.1)对第i个位置采集的灰度图像,选取穿过灰度图像几何中心点的x方向和y方向两条线段上的灰度值,分别计算x方向线段灰度的梯度值和y方向线段灰度的梯度值其中,i=0,1,...,n,gray
i
为第i个位置采集的灰度图片;
18.(1.2.2)从左到右对进行逐点评估,记录最大值位置x
left,i
,和最小值位置x
right,i
,从上到下对进行逐点评估,记录最大值位置y
top,i
和最小值位置y
down,i
。
19.步骤(1.3)中,所述计算各灰度图像长、宽和中心点坐标值,并与基准位置处灰度图像的相应值进行比较,具体包括以下步骤:
20.(1.3.1)计算第i个位置采集的灰度图像中心点坐标(1.3.1)计算第i个位置采集的灰度图像中心点坐标以及x和y方向图像长度d
x,i
=x
right,i
‑
x
left,i
,d
y,i
=y
top,i
‑
y
down,i
;其中,x
left,i
为第i个位置采集的灰度图像射野左边界值,x
right,i
为第i个位置采集的灰度图像射野右边界值,y
top,i
为第i个位置采集的灰度图像射野上边界值,y
down,i
为第i个位置采集的灰度图像射野下边界值;
21.(1.3.2)将(1.3.1)计算值与基准位置处灰度图像的相应值x
mid,0
,y
mid,0
,d
x,0
,d
y,0
进行比较,计算得到第i个位置处射野影像装置的位置校正参数,分别为x方向校正参数dif
x,i
=x
mid,i
‑
x
mid,0
,y方向校正参数dif
y,i
=y
mid,i
‑
y
mid,0
,源到射野影像装置距离校正参数
22.有益效果:本发明与现有技术相比,其有益效果在于:(1)基于灰度梯度获取图像边界,从而得到精确的位置校正参数,且不需要添加标记点,提高了校正方法的适用性;(2)解决了传统标记点方式通过使用标记点来获取不同位置处射野影像装置位置校正参数,存在的需要在加速器射野固定位置处粘贴标记点,且位置校正参数的精度与标记点粘贴精度直接相关等问题。
附图说明
23.图1为本发明的流程图。
具体实施方式
24.下面结合具体实施方式和说明书附图对本发明的技术方案做进一步详细介绍。
25.本发明的位置校正系统包括射线源模块、射野影像装置模块、位置校正模块以及相应存储介质。射野影像装置模块保持与射线源正对状态,即射野影像装置中心点垂直线经过射线源点,同时射野影像装置与射线源点距离为一固定值;
26.位置校正模块包括灰度图像传输模块、灰度图像预处理模块、位置校正参数数据库计算模块和位置校正参数计算模块,其中灰度图像传输模块可将射野影像装置采集的灰度图像从射野影像装置传输到位置校正模块,灰度图像预处理模块对采集的灰度图像进行平滑处理,位置校正参数数据库计算模块根据输入的灰度图像和对应位置计算得到位置校正参数数据库,位置校正参数模块在射线源进行照射时根据获取的射野影像装置位置参数计算得到当前位置的位置校正参数。
27.本实施例中以对一个辐射剂量检测系统的射野影像装置进行位置校正为例。
28.如图1所示,本发明还包括射野影像装置的位置校正方法,包括以下步骤:
29.(1)建立射野影像装置的位置校正参数数据库,包括以下步骤:
30.(1.1)将射线源打开形成射野,对不同位置的射野影像装置进行照射,采集形成的灰度图像;
31.具体地,将0~355度按5度划分为72个角度,每个角度加速器在射野影像装置位置处形成10cm
×
10cm射野进行照射,照射强度为50mu,源与射野影像装置之间不放置任何介质,距离为140cm,采集射野影像装置上生成的72张灰度图像;
32.(1.2)计算所采集的灰度图像沿x和y方向的梯度场,根据梯度场确认图像边界坐标,具体包括以下步骤:
33.(1.2.1)对第i个位置采集的灰度图像,选取穿过灰度图像几何中心点的x方向和y方向两条线段上的灰度值,分别计算x方向线段灰度的梯度值和y方向线段灰度的梯度值其中,i=0,1,...,72,gray
i
为第i个位置采集的灰度图片;
34.(1.2.2)从左到右对进行逐点评估,记录最大值位置x
left,i
,和最小值位置x
right,i
,从上到下对进行逐点评估,记录最大值位置y
top,i
和最小值位置y
down,i
。
35.(1.3)根据图像边界坐标计算各灰度图像长、宽和中心点坐标值,并与基准位置处灰度图像的相应值进行比较,获得不同位置射野影像装置位置校正参数;具体包括以下步骤:
36.(1.3.1)计算第i个位置采集的灰度图像中心点坐标(1.3.1)计算第i个位置采集的灰度图像中心点坐标以及x和y方向图像长度d
x,i
=x
right,i
‑
x
left,i
,d
y,i
=y
top,i
‑
y
down,i
;其中,x
left,i
为第i个位置采集的灰度图像射野左边界值,x
right,i
为第i个位置采集的灰度图像射野右边界值,y
top,i
为第i个位置采集的灰度图像射野上边界值,y
down,i
为第i个位置采集的灰度图像射野下边界值;
37.(1.3.2)将(1.3.1)计算值与基准位置处灰度图像的相应值x
mid,0
,y
mid,0
,d
x,0
,d
y,0
进行比较,计算得到第i个位置处射野影像装置的位置校正参数,分别为x方向校正参数dif
x,i
=x
mid,i
‑
x
mid,0
,y方向校正参数dif
y,i
=y
mid,i
‑
y
mid,0
,源到射野影像装置距离校正参数
38.(2)获取当前射野影像装置的位置参数;
39.(3)根据当前射野影像装置位置参数,调用位置校正参数数据库,通过插值得到校正参数;
40.(4)根据校正参数对射野影像装置生成的灰度图像进行位置校正。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
