1.本发明涉及轨道交通信号领域,特别涉及一种地铁信号平面图设备信息的批量提取及实现方法。
背景技术:
2.地铁信号平面图基于设计院出具的线路纵断面图、全线线路限速、调线调坡资料,依据信号专业的系统布置和配置规则绘制而成,是承接站前(土建)专业与站后(信号)专业的重要图纸,是信号专业开展系统工程应用设计工作的核心。
3.在信号系统应用设计过程中,需要基于信号平面图进行系统设计、设计验证、数据准备和测试调试等工作。在系统设计阶段,目前的工作方法是人工查看平面图、建立相应表格,并逐一填入每一信号设备的名称及坐标、线路坡度、信号机方向、道岔信息等,再通过相应计算完成参数配置和设计;设计验证阶段,人工读图工作还须重复一次,工作量巨大、繁琐且易出错。尤其是遇到项目多、工期紧的情形时,当前工作方法难以满足实际需要。有鉴于此,迫切需要一种地铁信号平面图设备信息的批量提取方法,提高工作效率和工作质量。
技术实现要素:
4.本发明的目的是提供一种地铁信号平面图设备信息的批量提取及实现方法,具有效率高、准确率高且可实现特定信息的灵活提取等优点。
5.为实现上述目的,本发明提供一种地铁信号平面图设备信息的批量提取及实现方法,其中地铁信号平面图由多种基础图元组成,所述基础图元包括文本、线、块、圆和弧,其批量提取及实现方法步骤包括:
6.步骤s1、从地铁信号平面图中批量提取信号平面图中信号设备相关的基本图元信息,整理形成文本图元信息表、线图元信息表、块图元信息表,并作为识别过程的输入;
7.步骤s2、归纳设备名称及坐标在地铁信号平面图中的显示特征,识别信号坐标区内全部信号设备及每个信号设备对应的坐标,并输出信号设备坐标表kp_info;
8.步骤s3、归纳坡度在地铁信号平面图中的显示特征,识别每段坡度的起点坐标系、起点坐标值、终点坐标系、终点坐标值和坡度值,并输出线路坡度表slope_list。
9.步骤s4、归纳信号机在地铁信号平面图中的显示特征,识别每个信号机的名称、方向,并输出信号机方向表sig_dir;
10.步骤s5、归纳道岔在地铁信号平面图中的显示特征,识别每个道岔的朝向以及对应的配对道岔,并输出道岔信息表switch_info。
11.其中,所述步骤s1包括如下步骤:
12.步骤s101、从地铁信号平面图提取全部文本图元形成文本类型信息表,包括文本的内容、x坐标、y坐标、旋转角度、高度;提取全部线图元形成线类型信息表,包括线的id、起点x坐标、起点y坐标、终点x坐标、终点y坐标;提取全部块图元形成块类型信息表,包括块的名称、块内直线、圆形和弧线的坐标及数量;
13.步骤s102、对步骤s101中的文本图元信息表和线图元信息表排序调整。
14.优选地,所述步骤s102中排序调整规则如下:对于所述文本图元信息表,从上至下,每个文本图元占一行;从上至下,先按照每个文本图元的x坐标从小到大排序;从上至下,后按照每个文本图元的y坐标从小到大排序;对于所述线图元信息表,从上至下,每个线图元占一行;对于每个线图元,若x坐标不同,则以两端点中x坐标小的端点作为起点;若x坐标相同,则以两端点中y坐标小的端点作为起点;从上至下,先按照每个线图元的起点的x坐标从小到大排序,后按照每个线图元的起点的y坐标从小到大排序。
15.其中,所述步骤s2包括如下步骤:
16.步骤s201、识别地铁信号平面图内的全部信号坐标区,所述信号坐标区是包含“公里标”和“设备”两个文本的矩形范围,且矩形范围内有至少一个信号设备;
17.步骤s202、识别每个所述信号坐标区内的全部信号设备,所述信号设备信息包含名称和坐标;其中,信号设备名称为信号坐标区内垂直方向的文本,文本内容包含字母,且没有“ /
‑”
字符串;
18.步骤s203、识别每个所述信号设备的坐标,所述信号设备坐标是与信号设备名称位于同一信号坐标区、且距离最近的文本,文本内容包含“ /
‑”
字符串;信号设备坐标包括坐标系和坐标值;
19.步骤s204、输出信号设备坐标表kp_info,包含每个所述信号设备名、坐标系和坐标值。
20.优选地,所述步骤s201中,同一矩形范围内的“设备”和“公里标”两个文本满足两文本之间的文本距离最小;其中,所述文本距离指两文本x坐标差值的平方与两文本y坐标差值的平方的和。
21.其中,所述步骤s3包括如下步骤:
22.步骤s301、识别地铁信号平面图内的所有坡度,每个所述坡度由两条竖线和连接两条竖线的斜线构成;
23.步骤s302、识别每个所述坡度的起点坐标值、终点坐标值和坡度值,起点坐标值和终点坐标值分别是最靠近竖线的数字文本;坡度值是最靠近斜线的两个数字文本中值较小的那个;
24.步骤s303、识别每个所述坡度的起点坐标系和终点坐标系,通过筛选信号坐标区内分别与起点坐标值和终点坐标值的x坐标最接近的坐标文本,相应坐标文本所在的坐标系即为坡度的起点坐标系和终点坐标系;
25.步骤s304、输出线路坡度表slope_list,包含起点坐标系、起点坐标值、终点坐标系、终点坐标值和坡度值。
26.优选地,所述步骤s301中,每条所述竖线的长度满足起点x坐标和终点x坐标差值小于给定值,且两条竖线中点y坐标差值小于给定值;所述斜线满足起点x坐标和终点x坐标差值大于给定值,且所述斜线的中点在两条竖线的起点和终点分别连线所组成的四边形内,两竖线之间有且仅有一条满足要求的斜线。
27.其中,所述步骤s4包括如下步骤:
28.步骤s401、地铁信号平面图中信号机用块图元绘制,识别地铁信号平面图内的所有信号机块,所述信号机块包含至少一条直线和两个圆;
29.步骤s402、识别信号机块的方向,确定信号灯柱,并根据信号机块内所有圆心与灯柱的相对位置确定信号机块的朝向;
30.步骤s403、确定每个信号块对应的信号机名称,信号机名符合相应命名规则,且与信号机块距离小于给定值;
31.步骤s404、输出信号机方向表sig_dir,包括信号机名称、方向。
32.优选地,所述步骤s402中的信号灯柱为与信号机块中的两圆圆心连线垂直的直线;其中,所述两圆圆心均在信号灯柱的左边,则信号机块方向朝左,或所述两圆均在信号灯柱的右边,则信号机块方向朝右。
33.其中,所述步骤s5包括如下步骤:
34.步骤s501,识别地铁信号平面图内的所有道岔,对任一个块图元,若其附近一定距离内存在符合道岔命名规则的文本,该块即为一个道岔,该文本即为道岔名;
35.步骤s502,对步骤s501的道岔,在线图元信息表中,搜索任一个端点与所述道岔的距离小于给定值的所有线;
36.步骤s503,识别每个所述道岔的配对道岔,对于步骤s502搜索到的任一条线,若存在另一道岔及另一道岔名的文本,且满足所述另一道岔与步骤s502中的线的另一个端点的距离小于给定值,则该配对道岔与步骤s501所述道岔构成一个道岔组;
37.步骤s504,识别所述道岔组的方向,若步骤s501中道岔的x坐标小于步骤s503中配对道岔的x坐标,则认为道岔方向朝右,反之朝左;
38.步骤s505,输出道岔信息表switch_info,包括道岔名称、朝向以及配对道岔名称。
39.综上所述,与现有技术相比,本发明提供的一种地铁信号平面图设备信息的批量提取及实现方法,具有如下有益效果:
40.1、本发明提出了城轨领域信号平面图上设备坐标、线路坡度、信号机方向、道岔信息等关键信息的图形识别和特征提取方法;
41.2、本发明实现了地铁信号平面图信号设备信息的一次性批量提取,还可实现特定信息的灵活提取;
42.3、本发明有效地解决了人工提取平面图信息效率低、易出错等问题。
附图说明
43.图1为本实施例的地铁信号平面图样图;
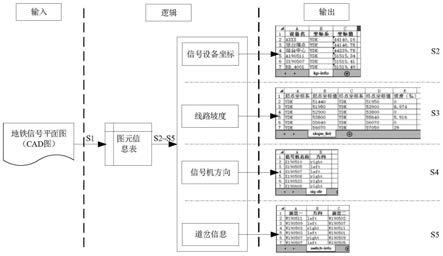
44.图2为本发明的地铁信号平面图设备信息的批量提取及实现方法的地铁信号平面图信号设备批量提取示意图;
45.图3为本发明的地铁信号平面图设备信息的批量提取及实现方法的获取信号平面图图元流程图;
46.图4为本发明的地铁信号平面图设备信息的批量提取及实现方法的信号设备坐标识别流程图;
47.图5为本发明的地铁信号平面图设备信息的批量提取及实现方法的线路坡度识别流程图;
48.图6为本发明的地铁信号平面图设备信息的批量提取及实现方法的信号机方向识别流程图;
49.图7为本发明的地铁信号平面图设备信息的批量提取及实现方法的道岔信息识别流程图。
具体实施方式
50.以下将结合本发明实施例中的附图1~附图7,对本发明实施例中的技术方案、构造特征、所达成目的及功效予以详细说明。
51.需要说明的是,在本发明中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括明确列出的要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
52.本发明提供了一种地铁信号平面图设备信息的批量提取及实现方法,图1为地铁信号平面图样图。如图2所示,该地铁信号平面图设备信息的批量提取及实现方法包括:
53.步骤s1、从地铁信号平面图中批量提取与信号设备相关的图元信息,整理形成文本类型信息表、线类型信息表和块类型信息表,并作为后续识别过程的输入;
54.步骤s2、归纳设备名称及坐标在地铁信号平面图中的显示特征,识别图中信号坐标区内全部信号设备及每个信号设备对应的坐标,并输出信号设备坐标表kp_info;
55.步骤s3、归纳坡度在地铁信号平面图中的显示特征,识别图中每段坡度的起点坐标系、起点坐标值、终点坐标系、终点坐标值和坡度值,并输出线路坡度表slope_list;
56.步骤s4、归纳信号机在地铁信号平面图中的显示特征,识别每个信号机的名称、方向,并输出信号机方向表sig_dir;
57.步骤s5、归纳道岔在地铁信号平面图中的显示特征,识别每个道岔的朝向和对应的配对道岔,并输出道岔信息表switch_info。
58.步骤s1中,通过采用python的库函数dxfgrabber可以离线的对地铁信号平面图中的所有图元进行遍历,并获取各图元的基本属性(包括在地铁信号平面图中的位置即x坐标和y坐标、图层、颜色、文本高度、旋转角度等)。所述图元包括text(文本)、line(线)、block(块)、circle(圆)、arc(弧)等类型,地铁信号平面图由上述多种图元类型组成。其中,line图元内的图形类型包括竖线、横线以及斜线;block图元内的图形类型包括块内直线、圆形和弧线;所述步骤s1中地铁信号平面图获取相应图元信息的方法仅需提取text、line、block类型图元,如图3所示,包括以下步骤:
59.步骤s101、通过库函数dxfgrabber从地铁信号平面图中:
60.提取全部文本图元形成文本类型信息表,包括文本的内容、x坐标、y坐标、旋转角度、高度;
61.提取全部线图元形成线类型信息表,包括线的id、起点x坐标、起点y坐标、终点x坐标、终点y坐标;
62.提取全部块图元形成块类型信息表,包括块的名称、块内直线、圆形和弧线的坐标及数量;
63.主要算法如下:
[0064][0065][0066]
步骤s102、对步骤s101中的文本图元信息表和线图元信息表的排序进行调整,具体排序方法如下:
[0067]
对于文本图元信息表,从上至下,每个文本图元占一行;从上至下,先按照每个文本图元的x坐标(横坐标)从小到大排序;从上至下,后按照每个文本图元的y坐标(纵坐标)从小到大排序;
[0068]
对于线图元信息表,从上至下,每个线图元占一行;对于每个线图元,若该条线的两个端点的x坐标不同(即为一条横线或斜线),则以其中x坐标小的端点作为起点;若两端点x坐标相同(即为一条竖线),则以其中y坐标小的端点作为起点;之后从上至下,先按照每个线图元的起点的x坐标从小到大排序,后按照每个线图元的起点的y坐标从小到大排序;
[0069]
完成排序调整后的文本图元信息表和线图元信息表作为步骤s2~s5识别过程的输入。
[0070]
通过线和文本的位置关系、图元属性,筛选目标信号设备,如图4所示,步骤s2主要包含以下步骤:
[0071]
步骤s201、识别地铁信号平面图内的全部信号坐标区,在文本图元信息表中,查找内容为“设备”和“公里标”的文本,根据x、y坐标将“设备”和“公里标”配对(两文本之间的文本距离最小);若配对的“设备”和“公里标”所在的矩形范围内包含至少一个信号设备,则认为是信号坐标区;其中,文本距离指两文本x坐标差值的平方与两文本y坐标差值的平方的和;
[0072]
步骤s202、识别每个信号坐标区内全部信号设备,在文本图元信息表中提取所有信号坐标区内的信号设备文本,信号设备文本必须满足:文本图元内容包含字母且没有“ /
‑”
字符串,同时根据旋转角度判断为垂直方向文本;
[0073]
步骤s203、识别每个信号设备的坐标,信号设备的坐标必须满足:文本图元内容包含字母和“ /
‑”
字符串、方向竖直、与信号设备文本在同一信号坐标区、与信号设备文本的x坐标差值小于给定值(此处x坐标差值<=8
×
设备文本的高度)且距离信号设备文本最近;确定信号设备的坐标后,拆分该文本内容即可得到信号设备的坐标系和坐标值;
[0074]
步骤s204、输出信号设备坐标表kp_list,包括信号设备名、坐标系、坐标值;信号设备名即为步骤s202中的信号设备文本。
[0075]
通过线之间的关系确定地铁信号平面图内的所有坡度,再通过线和文本的位置关
系,获取所述坡度的坐标和坡度值,如图5所示,步骤s3包括以下步骤:
[0076]
步骤s301,识别地铁信号平面图内的所有坡度,在线图元信息表中,通过两条竖线(每条所述竖线的起点坐标值和终点坐标值的x坐标差值小于给定值(此处给定值为0.1))和一条斜线(斜线的起点坐标值和斜线的终点坐标值的x坐标差值大于给定值(此处给定值为0.1))确定一个可能的坡度,三条线必须满足:两竖线长度差小于给定值(此处给定值为两条竖线中长度短的竖线的1/5),两竖线各自中点的y坐标差值小于给定值(此处给定值为两条竖线中位于左边的竖线长度的1/5),斜线起止点x坐标差值与两竖线起点x坐标差值接近,即(两竖线的x坐标差值
‑
斜线起止x坐标差值)的绝对值<两竖线的x坐标差值/3,(斜线起止y坐标差值
‑
较短竖线长度)<1.2
×
较短竖线长度,斜线的中点在两竖线的起点和终点分别连线所组成的四边形内,两竖线之间有且仅有一条满足要求的斜线;两条竖线中,竖线起点x坐标小的竖线是坡度起点,另一条竖线为坡度终点;
[0077]
步骤s302,识别每个坡度的起点坐标值、终点坐标值和坡度值,在文本图元信息表中查找起点坐标值、终点坐标值和坡度值;
[0078]
其中,起点坐标值和终点坐标值的文本必须满足:方向垂直、文本内容仅含“ /
‑”
字符串和数字、与两条竖线的起点x坐标差值小于给定值(此处x坐标差值<3
×
文本高度)且最靠近两条竖线的文本即为起点坐标值和终点坐标值的文本;
[0079]
其中,坡度值文本必须满足:文本内容仅含“ /
‑”
字符串和数字、落在两竖线的起点和终点分别连线所组成的四边形内、且取最靠近斜线中点的两个文本中数字值较小的文本;一旦搜到符合上述要求的起点坐标值、终点坐标值和坡度值,则认为查到一段线路坡度,若斜线的左端点y坐标小于右端点y坐标,则对坡度值取反;
[0080]
步骤s303,识别每个坡度的起止坐标系,当步骤s301和步骤s302同时成立时,查询信号坐标区中与起点坐标值、终点坐标值最近的坐标,提取该坐标的坐标系作为坡度的起点、终点坐标系;
[0081]
步骤s304,输出线路坡度表slope_list,包括起点坐标系、起点坐标值、终点坐标系、终点坐标值、坡度值。
[0082]
地铁信号平面图中信号机用块图元绘制,进而利用圆和线的相对位置判断信号机块方向,如图6所述,步骤s4具体包括以下步骤:
[0083]
步骤s401,识别信号机块,在块图元信息表中,根据块图元组成筛选信号机块:至少包含一条直线和两个圆;
[0084]
步骤s402,识别信号机块的方向,首先确定信号灯柱(即与两圆圆心连线垂直的直线),之后判断圆心与信号灯柱的位置关系,确定信号机块方向:若圆心均在信号灯柱的左边,则信号机方向朝左,或圆心均在信号灯柱的右边,则朝右;
[0085]
步骤s403,确定每个信号块对应的信号机,信号机必须满足:是步骤s202识别的信号设备,在文本图元信息表中,文本内容以给定字母(根据信号机的命名规则确定)开头且至少包含一个数字,文本内容与信号机块距离小于给定值(此处给定值为x坐标差值<=30,y坐标差值<=20);
[0086]
步骤s404,输出信号机方向表sig_dir,包括信号机名称、方向。
[0087]
地铁信号平面图中道岔文本附近会存在块图元,因此利用道岔文本和块图元的相对位置关系筛选道岔信息,如图7所示,步骤s5包括以下具体步骤:
[0088]
步骤s501,识别地铁信号平面图内的全部道岔,遍历所有块图元,对任一块图元,若距离其一定范围内存在一个文本,且文本内容以给定字母(根据道岔命名规则确定)开头且至少包含一个数字,此即为一个道岔(块);
[0089]
步骤s502,对步骤501的道岔,在线图元信息表中,搜索“某一个端点与块的距离小于给定值(此处给定值为x坐标差值<=3,y坐标差值<=1.5)”的所有线;
[0090]
步骤s503,查询配对道岔,若步骤501的道岔和步骤502的线均存在,则进一步查找满足以下条件的道岔:该道岔与步骤502的线的另一个端点的距离小于给定值(此处给定值为x坐标差值<=3,y坐标差值<=1.5)、道岔一定距离范围内存在一个内容以给定字母(根据道岔的命名规则确定)开头且至少包含一个数字的文本,若存在,则认为找到步骤501的配对道岔,所述两个道岔构成一个道岔组;
[0091]
步骤s504,识别每个道岔的方向,若步骤501道岔的x坐标小于步骤503配对道岔的x坐标,则认为道岔方向朝右,反之朝左;
[0092]
步骤s505,输出道岔信息表switch_info,包括道岔名称、方向、配对道岔名称。
[0093]
综上所述,与现有技术相比,本发明提供的地铁信号平面图设备信息的批量提取及实现方法有效地解决了人工提取平面图信息效率低、易出错等问题。
[0094]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
