一种车辆辅助驾驶系统、车道线时空拟合的系统和方法、fpga芯片
技术领域
1.本发明涉及机器视觉、辅助驾驶这一技术领域,更具体地说,尤其涉及一种车辆辅助驾 驶系统、车道线时空拟合的系统和方法、fpga芯片。
背景技术:
2.车道线是道路中最为常见的路面标识,是车辆行驶路径的主要参考。车道线检测功能对 辅助驾驶和自动驾驶功能,都是必不可少的功能。通常的车道线检测方法,是在传感器(主要 为视觉传感器)采集的图像信息中,对路面上车道线的特征进行识别,拟合出车道线的方向, 作为驾驶系统的决策输入。
3.而采用图像信息中提取车道线特征的方法,常常会发生“由于遮挡或者视角原因而导 致特征不完整”的问题。而当特征不完整时,车道线最终拟合的方向精度会有很大的精度 影响,甚至会导致拟合失败。
4.因此,研究一种提升车道线最终拟合的方向的方法,对于提升辅助驾驶和自动驾驶功 能是一个亟待解决的技术问题。
技术实现要素:
5.本发明的目的在于提供一种车辆辅助驾驶系统、车道线时空拟合的系统和方法、fpga 芯片,其解决了现有技术中的不足之处。
6.一种车道线时空拟合的方法,包括以下步骤:
7.step1,对一段连续时间t1~t
n
时刻内的第1~n张图像(即tx时刻对应的是第x张图像) 的每个图像的车道线进行检测拟合;
8.step2,逐个计算任意前后两张图像,即第f
‑
1张图像,第f张图像之间的[rt]
f
‑
1,f
矩阵:
[0009]
step3,将一段连续时间内的车道线统一到一个坐标系内:
[0010]
step3
‑
1,从t1~t
n
‑1时刻的每张图像,即分别从第1~n张图像中选取车道线的采样点;
[0011]
step3
‑
2,将第1~n张图像中选取的采样点的坐标均统一到第n张图像的坐标系内;
[0012]
step4,进行数据拟合。
[0013]
进一步,step3,还包括:step3
‑
3,计算step3
‑
1中的n张图像选取的采样点的权重;
[0014]
其中,任意时刻下tx中采样点权重l采用下式求解:
[0015][0016]
γ表示参数,取为0.1;
[0017]
u表示调节权重的参数;
[0018]
z为tx时刻下的坐标系下的z值。
[0019]
进一步,step1,具体包括:对于任意一个图像而言,采用以下步骤进行检测拟合:
[0020]
step1
‑
1,提取图像中的纹理边缘信息作为车道线的底层特征;
[0021]
step1
‑
2,将每一条车道线均采用三次曲线来进行拟合,方程表达形式为:
[0022]
x=f(z)=a*z3 b*z2 c*z d;
[0023]
其中,本系统中的坐标系定义为:z向为车辆前进的方向在水平面的投影,y向为竖向 向上的方向,x向为与z方向、y方向垂直的方向;以车辆接触的路面定义为y=0,以双目 相机的中心线为x=0,以车辆的最前端为z=0;
[0024]
其中,a,b,c,d均是拟合出来的参数。
[0025]
进一步,step2,基于惯导单元和车辆时速预测相机姿态变化,即通过车辆的运动速度v 和车辆的角速度w
y
信息,计算任意第f
‑
1图像与第f张图像之间的[rt]矩阵;
[0026]
其中,w
y
表示绕水平面的转动的角速度;
[0027][0028]
其中,δt=t
f
‑
t
f
‑1,v为t
f
‑1时刻的车速,w
y
为t
f
‑1时刻的角速度。
[0029]
进一步,step2,基于前后任意两张图像,即第f
‑
1图像与第f张图像的特征点来计算 [rt]
f
‑
1,f
矩阵:
[0030]
从第f
‑
1张图像中提取v个关键点,其坐标:
[0031][0032]
从第f张图像与第f
‑
1张图像中找到匹配的关键点,其坐标点分别为:
[0033][0034]
则满足以下矩阵:
[0035][0036]
其中,
[0037]
或者:
[0038][0039]
进一步,step2,逐个计算任意前后两张图像,即第f
‑
1张图像,第f张图像之间的[rt]
f
‑
1, f
矩阵,具体包括以下步骤:
[0040]
step2
‑
1,初步确定[rt]
f
‑
1,f,初步
,即利用陀螺仪、轮速信息获取模块201、传感器姿态预 测模块202计算[rt]
f
‑
1,f,初步
[0041]
基于惯导单元和车辆时速预测相机姿态变化,即通过车辆的运动速度v和车辆的角速度 w
y
信息,计算任意第f
‑
1图像与第f张图像之间的[rt]
f
‑
1,f,初步
[0042]
其中,w
y
表示绕水平面的转动的角速度;
[0043][0044]
其中,δt=t
f
‑
t
f
‑1,v为t
f
‑1时刻的车速,w
y
为t
f
‑1时刻的角速度。
[0045]
step2
‑
2,基于前后任意两张图像,即第f
‑
1图像与第f张图像的特征点来计算[rt]
f
‑
1,f
矩阵:
[0046]
从第f
‑
1张图像中提取v个关键点,其坐标:
[0047][0048]
则上述v个关键点在第f张图像中的坐标初步确定为:
[0049][0050]
以上述v个关键点在第f张图像中的坐标初步确定点为圆心,半径为10~30cm(该参数 能够根据实际需要调整),从第f张图像与第f
‑
1张图像中找到匹配的关键点,其坐标点分 别为:
[0051][0052]
则满足以下矩阵:
[0053][0054]
其中,
[0055]
或者:
[0056][0057]
进一步,step3
‑
1,分别从第1~n张图像中选取车道线的采样点,且提取采样点在各图像 自身坐标系下的坐标点,采样点选取时是将每一张图像中拍摄到的车道线进行选取,且间隔 1cm~100cm选取一个采样点;
[0058]
具体包括:
[0059]
首先,从第1张图像中采样车道线的特征点p
1,1
,p
2,1
,
……
p
m1,1
的三维坐标,构建坐标集合 矩阵为:
[0060]
[st1]=[(p
1,1
,1)
t
(p
2,1
,1)
t
……
(p
m1,1
,1)
t
]
[0061]
即,
[0062][0063]
则有:
[0064][0065]
每个特征点的三维坐标的形式均为:p
i,1
=(x
i,1
,0,z
i,1
),其中,z
i,1
通过step1中得到 的第一张图像中的车道线的拟合方程计算而得;
[0066]
然后,从第2张图像中采样车道线的特征点p
1,2
,p
2,2
,
……
p
m2,1
的三维坐标,其坐标集合矩 阵为:
[0067]
[st2]=[(p
1,2
,1)
t
,(p
2,2
,1)
t
……
(p
m2,2
,1)
t
]
[0068]
即:
[0069][0070]
则有:
[0071][0072]
每个特征点的三维坐标的形式均为:p
i,2
=(x
i,2
,0,z
i,2
),其中,z
i,2
通过step1中得到 的第2张图像中的车道线的拟合方程计算而得;
[0073]
……
[0074]
然后,从第n
‑
1张图像中采样车道线的特征点p
1,n
‑1,p
2,n
‑1,
……
p
m n
‑
1,n
‑1的三维坐标,其坐 标集合矩阵为:
[0075]
[st
n
‑1]=[(p
1,n
‑1,1)
t
,(p
2,n
‑1,1)
t
,
……
(p
m n
‑
1,n
‑1,1)
t
]
[0076]
即:
[0077][0078]
则有:
[0079][0080]
每个特征点的三维坐标的形式均为:p
i,n
‑1=(x
i,n
‑1,0,z
i,n
‑1),其中,z
i,n
‑1通过step1 中得到的第n
‑
1张图像中的车道线的拟合方程计算而得;
[0081]
最后,从第n张图像中采样车道线的特征点p
1,n
,p
2,n
,
……
p
m n,,n
的三维坐标;
[0082]
每个特征点的三维坐标的形式均为:p
i,n
=(x
i,n
,0,z
i,n
),其中,x
i,n
通过step1中得到 的第n张图像中的车道线的拟合方程计算而得。
[0083]
进一步,step3
‑
2,将第1~n张图像中选取的采样点的坐标统一到第n张图像的坐标系内:
[0084]
首先,t
n
‑1时刻对齐到t
n
时刻,即第n
‑
1张图像选取的采样点的坐标统一到第n张图像 的坐标系内:
[0085]
[st
n
‑
1,n
]=[rt]
n
‑
1,n
×
[st
n
‑1];[st
n
‑
1,n
]表示坐标集合矩阵[st
n
‑1]转换到第t
n
时刻的坐标系下 的坐标集合矩阵;[rt]
n
‑
1,n
表示从t
n
‑1到t
n
的[rt]矩阵(即第n
‑
1张图像到第n张图像的[rt] 矩阵)。
[0086]
……
[0087]
然后,第t
f
时刻对齐到t
n
时刻:
[0088]
[st
f,n
]=[rt]
f,f 1
×
[rt]
f 1,f 2
……
[rt]
n
‑
2,n
‑1×
[rt]
n
‑
1,n
×
[st
f
];
[0089]
……
[0090]
最后,第t1时刻对齐到t
n
时刻:
[0091]
[st
1,n
]=[rt]
1,2
×
[rt]
2,3
……
[rt]
n
‑
2,n
‑1×
[rt]
n
‑
1,n
×
[st1]。
[0092]
进一步,step4,数据拟合:
[0093]
基于step3
‑
2得到的第1~n张图像的采样点统一到第n张图像的坐标系的坐标集合,采 用三次曲线进行拟合,能够得到车道线方程。
[0094]
进一步,step4,数据拟合:
[0095]
基于step3
‑
2得到的第1~n张图像的采样点统一到第n张图像的坐标系的坐标集合,以 及step3
‑
3得到的各个采样点的权重,采用三次曲线进行加权拟合,能够得到车道线方程。
[0096]
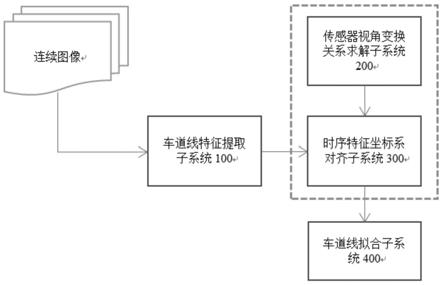
一种车道线时空拟合的系统,包括:车道图像存储系统、车道线特征提取子系统、传感 器视角变换关系求解子系统、时序特征坐标系对齐子系统、车道线拟合子系统;
[0097]
车道线特征提取子系统与车道图像存储系统相互连通;
[0098]
车道线特征提取子系统、传感器视角变换关系求解子系统的输出端分别与时序特征坐标 系对齐子系统的输入端连接,时序特征坐标系对齐子系统的输出端与车道线拟合子系统的输 入端连接;
[0099]
其中,车道线特征提取子系统用于:提取图像中的纹理边缘信息作为车道线的底层特征, 进而检测出每一条车道线信息的方程;用于执行步骤step1;
[0100]
其中,传感器视角变换关系求解子系统包括:陀螺仪、轮速信息获取模块以及传感器姿 态预测模块,和/或相机位姿求解模块;用于执行步骤step2;
[0101]
其中,时序特征坐标系对齐子系统包括:时序特征坐标系变换模块;用于执行步骤step3;
[0102]
其中,车道线拟合子系统,用于执行步骤step4;
[0103]
进一步,时序特征坐标系对齐子系统还包括:时序特征拼接模块,时序特征拼接模块用 于执行步骤step3
‑
3。
[0104]
一种fpga芯片,其存储有所述的执行车道线时空拟合的方法的程序。
[0105]
一种辅助驾驶系统,包括前述的车道线时空拟合系统、显示屏;车道线时空拟合系统利 用车道线拟合子系统得到的车道拟合方程,在显示屏上显示预测的车道线。
[0106]
本发明的有益效果在于:
[0107]
第一,本技术的第一个发明构思在于:
[0108]
车道线特征提取子系统100中通过图像
‑‑
>空间转换为顶视图上拟合方程使用了逆透视变 换(ipm)的技术,将图像空间检测到的车道线通过投影变换,转换到顶视图视角,最终以真实 空间的方程表示:
[0109]
x=f(z)=a*z3 b*z2 c*z d
[0110]
其创造性的思路体现在两点,一个是要将车道线的信息拟合出来,二是采用三次曲线进 行拟合。
[0111]
该思路的目的是要与时序特征坐标系对齐子系统300对应。对于车道线而言,道路上除 了实线以外,还有诸多虚线。发明人发现:对于虚线而言,如果不提取虚线之间的空白处的 特征,最终拟合出来的效果相当差(虚线之间有90cm、60cm、40cm三种规格)。
[0112]
但是,虚线之间的空白处没有车道线,无法直接从图像提取关键点,这就是一个极大的 问题。
[0113]
在经过若干尝试后,发明人团队成员提出了:先将车道线的信息拟合出来,这样就可以 计算虚线空白处的车道线的坐标,进而,时序特征坐标系对齐子系统300在工作时,就能够 提供更多的特征点坐标加入进来。
[0114]
第二,本技术的第二个发明构思在于:实施例二提出前后图像的rt矩阵的计算方式。
[0115]
第三,本技术的第三个发明构思在于,实施例三提出了提升计算实施例二的rt矩阵速 度的方式。
[0116]
第四,本技术的第四个发明构思在于:对齐车道线参数的方式,不是简单的相同权重采 样,而是与视觉的特点结合,进行不同权重的采样,保证对齐的精确性。特别的,如何设计 权重l的方式是发明人方案创新的核心与难点。
[0117]
第五,本技术的底层发明构思在于:本技术的车道线拟合方法是为了提供一种辅
助驾驶 系统,即通过前述的车道线来预测未来的车道线方向,从而方便驾驶人员驾驶。
附图说明
[0118]
下面结合附图中的实施例对本发明作进一步的详细说明,但并不构成对本发明的任何限 制。
[0119]
图1是实施例一的一种车道线时空拟合的系统的架构图。
[0120]
图2是实施例一的陀螺仪、轮速信息获取模块201,传感器姿态预测模块202、时序特征 坐标系变换模块301的架构图。
[0121]
图3是本技术的xyz坐标系示意图。
[0122]
图4是实施例二的一种车道线时空拟合的系统的架构图。
[0123]
图5是实施例二的传感器视角变换关系求解子系统、时序特征坐标系对齐子系统的子模 块设计示意图。
[0124]
图6是实施例三的传感器视角变换关系求解子系统、时序特征坐标系对齐子系统的子模 块设计示意图。
[0125]
图7是实施例四的传感器视角变换关系求解子系统、时序特征坐标系对齐子系统的子模 块设计示意图。
[0126]
图8是权重l的示意图。
[0127]
附图标记说明如下:
[0128]
道线特征提取子系统100、传感器视角变换关系求解子系统200、时序特征坐标系对齐子 系统300、车道线拟合子系统400;
[0129]
陀螺仪、轮速信息获取模块201;
[0130]
传感器姿态预测模块202;
[0131]
相机位姿求解模块203;
[0132]
时序特征坐标系变换模块301;
[0133]
对于时序特征拼接模块302。
具体实施方式
[0134]
实施例一:如图1~2所示,一种车道线时空拟合的系统,包括:车道图像存储系统、车 道线特征提取子系统100、传感器视角变换关系求解子系统200、时序特征坐标系对齐子系统 300、车道线拟合子系统400;
[0135]
车道线特征提取子系统100与车道图像存储系统相互连通;
[0136]
车道线特征提取子系统100、传感器视角变换关系求解子系统200的输出端分别与时序 特征坐标系对齐子系统300的输入端连接,时序特征坐标系对齐子系统300的输出端与车道 线拟合子系统400的输入端连接。
[0137]
下面就这四个子系统的功能进行说明。
[0138]
第一,<车道线特征提取子系统100>
[0139]
车道线特征提取子系统100的工作过程如下:
[0140]
x101,提取图像中的纹理边缘信息作为车道线的底层特征;
[0141]
x102,通过聚类和拟合的方式,检测出每一条车道线信息的方程;
[0142]
x103,通过图像
‑‑
>空间转换为顶视图上拟合方程,即完成单一时刻的视角范围内的车道 线检测功能。
[0143]
需要说明的是:步骤x103中,通过图像
‑‑
>空间转换为顶视图上拟合方程使用了逆透视 变换(ipm)的技术,将图像空间检测到的车道线通过投影变换,转换到顶视图视角,最终以真 实空间的方程表示:
[0144]
x=f(z)=a*z3 b*z2 c*z d
[0145]
本系统中的坐标系定义如图3所示,以车辆接触的路面定义为y=0;z向为车辆前进的 方向在水平面的投影,y向为竖向向上的方向,x向为与z方向、y方向垂直的方向(x方 向也是水平面的投影)。
[0146]
其中,a,b,c,d都是拟合出来的参数。
[0147]
第二,<传感器视角变换关系求解子系统200>
[0148]
所述的传感器视角为相机的视角,该子系统是为了获取观测位置(即相机)的方位(即 获取观测位置在时序上的空间变化表达式)。
[0149]
相机在运动过程中,不断的观测,实际上是不断的位姿变化的过程。具体而言,传感器 视角变换关系求解子系统通过相邻的两个时刻,相机坐标系之间发生了旋转和平移的关系, 可通过对观测的图像信息和其他传感器信息进行求解。
[0150]
观察位置的变化可以用旋转和平移矩阵表示为,用齐次矩阵表示
[0151][0152]
上述r
ij
,t
i
是相关参数。
[0153]
具体而言,传感器视角变换关系求解子系统200包括:陀螺仪、轮速信息获取模块201, 传感器姿态预测模块202。
[0154]
对于陀螺仪、轮速信息获取模块201而言,其用于获取陀螺仪(惯导单元)传递而来的3 个方向的加速度a
x
,a
y
,a
z
(即x方向、y方向、z方向的加速度)和3个角速度值ω
x
,ω
y (即水平面内的转动),ω
z
、获取车辆实时速度v(其可以从车身本身获得);
[0155]
对于传感器姿态预测模块202而言,其接受陀螺仪、轮速信息获取模块201传递而来的 信息,用于求解计算[rt]矩阵。
[0156]
本系统中把运动状态简化为顶视图上的2维运动,所以[rt]的计算仅使用速度v和角速 度ω
y
(即水平面的转动)即可计算。
[0157]
具体过程如下:
[0158]
在δt的时间内,在顶视图上的旋转角度的变化为ω
y
*δt,另外2个自由度没有旋转。
[0159]
位移的变化为
[0160]
如果ω
y
为0,那么就是一个直线运动,位移的变化为[0,0,v
×
δt]。在高度的维度上没 有位移。
[0161]
[rt]矩阵可求得:
[0162][0163]
也即,任意一个第f
‑
1张图像到第f张图像:
[0164][0165]
其中,δt=t
f
‑
t
f
‑1,v为t
f
‑1时刻的车速,w
y
为t
f
‑1时刻的角速度。
[0166]
第三,<时序特征坐标系对齐子系统300>
[0167]
时序特征坐标系对齐子系统300,是将一段连续时间内的车道线统一到一个坐标系内。
[0168]
具体而言,时序特征坐标系对齐子系统300包括,时序特征坐标系变换模块301。
[0169]
对于时序特征坐标系变换模块301,其功能在于:将t1~t
n
每个时刻的采样点的坐标对齐 到当前第t
n
时刻的坐标系下,具体的方法是:
[0170]
首先,从t1~t
n
‑1时刻的每张图像中采样车道线的特征点,构建坐标矩阵集合:
[0171][0172]
上式中,p
mn
‑
1,n
‑1表示第n
‑
1张图像中采样车道线的特征点数量,p
mf,f
表示第f张图像中 采样车道线的特征点数量,p
m1,1
表示第1张图像中采样车道线的特征点数量。
[0173]
上式中p
i
=(x
i
,0,z
i
),即表示任意一个特征点的三维坐标;
[0174]
其中,采样时,每隔5cm或者10cm或者其他任意一个距离选择一个特征点;
[0175]
例如:z=0,5,10,15,20
……
,z值依靠车道线特征提取子系统100得到的每张图像中的 拟合方程,可以计算x值。
[0176]
由于车道线在地面上,而地面是我们定义的坐标系高度零点,所以采样点的y
i
=0。
[0177]
时序特征坐标系变换模块301的工作是:
[0178]
首先,t
n
‑1时刻对齐到t
n
时刻,即第n
‑
1张图像选取的采样点的坐标统一到第n张图像的 坐标系内:
[0179]
[st
n
‑
1,n
]=[rt]
n
‑
1,n
×
[st
n
‑1];[st
n
‑
1,n
]表示坐标集合矩阵[st
n
‑1]转换到第t
n
时刻的坐标系下 的坐标集合矩阵;[rt]
n
‑
1,n
表示从t
n
‑1到t
n
的[rt]矩阵(即第n
‑
1张图像到第n张图像的[rt] 矩阵)。
[0180]
……
[0181]
然后,第t
f
时刻对齐到t
n
时刻:
[0182]
[st
f,n
]=[rt]
f,f 1
×
[rt]
f 1,f 2
……
[rt]
n
‑
2,n
‑1×
[rt]
n
‑
1,n
×
[st
f
];[st
f,n
]表示坐标集合矩阵[st
f
] 转换到第t
n
时刻的坐标系下的坐标集合矩阵;[rt]
f,f 1
表示从t
f
到t
f 1
的[rt]矩阵(即第f张 图像到第f 1张图像的[rt]矩阵)
[0183]
……
[0184]
最后,第t1时刻对齐到t
n
时刻:
[0185]
[st
1,n
]=[rt]
1,2
×
[rt]
2,3
……
[rt]
n
‑
2,n
‑1×
[rt]
n
‑
1,n
×
[st1];[st
1,n
]表示坐标集合矩阵[st1]转 换到第t
n
时刻的坐标系下的坐标集合矩阵。
[0186]
基于[st
1,n
],
……
[st
f,n
],
……
[st
n
‑
1,n
],能够直接读取第1张图像,
……
第f张图像,
……
第 n
‑
1张图像选取的采样点在第n张图像的坐标系下的坐标。
[0187]
基于时序特征坐标系变换模块301,可以得到在n张图像中的车道线采样点在当前t
n
时 刻下的坐标系的点集。
[0188]
<车道线拟合子系统400>
[0189]
时序特征坐标系变换模块301得到的n张图像中的车道线采样点在当前t
n
时刻下的坐标 系的点集进行拟合,拟合时仍然采用三次曲线进行拟合:
[0190]
x=f(z)=a*z3 b*z2 c*z d。
[0191]
一种车道线时空拟合的方法,包括以下步骤:
[0192]
step1,对一段连续时间内的n个图像的每个图像的车道线进行检测拟合:
[0193]
对于任意一个图像而言,采用以下步骤进行检测拟合:
[0194]
step1
‑
1,提取图像中的纹理边缘信息作为车道线的底层特征;
[0195]
step1
‑
2,将每一条车道线均采用三次曲线来进行拟合,方程表达形式为:
[0196]
x=f(z)=a*z3 b*z2 c*z d
[0197]
step2,基于惯导单元和车辆时速预测相机姿态变化,即通过车辆的运动速度v和车辆的 角速度w
y
信息,计算车辆下一个时刻的位置和姿态。
[0198]
具体为:
[0199]
f
‑
1张图像中相机视角下的任意一个特征点的坐标点为p1=(x1,y1,z1),第f张图像中相机 视角下与第f
‑
1张图像中匹配的特征点的坐标点为p2=(x2,y2,z2),则有:
[0200][0201]
其中,[rt]
f
‑
1,f
矩阵为:
[0202][0203]
其中,δt表示第f
‑
1张图像与第f张图像之间的时间差。
[0204]
step3,将一段连续时间内的车道线统一到一个坐标系内:
[0205]
step3
‑
1,从第1~n张图像中提取采样点坐标:
[0206]
首先,从第1张图像中采样车道线的特征点p
1,1
,p
2,1
,
……
p
m1,1
的三维坐标,构建坐标集合 矩阵为:
[0207]
[st1]=[(p
1,1
,1)
t
(p
2,1
,1)
t
……
(p
m1,1
,1)
t
]
[0208]
即,
[0209][0210]
则有:
[0211][0212]
每个特征点的三维坐标的形式均为:p
i,1
=(x
i,1
,0,z
i,1
),其中,z
i,1
通过step1中得到 的第一张图像中的车道线的拟合方程计算而得;
[0213]
然后,从第2张图像中采样车道线的特征点p
1,2
,p
2,2
,
……
p
m2,1
的三维坐标,其坐标集合矩 阵为:
[0214]
[st2]=[(p
1,2
,1)
t
,(p
2,2
,1)
t
……
(p
m2,2
,1)
t
]
[0215]
即:
[0216][0217]
则有:
[0218][0219]
每个特征点的三维坐标的形式均为:p
i,2
=(x
i,2
,0,z
i,2
),其中,z
i,2
通过step1中得到 的第2张图像中的车道线的拟合方程计算而得;
[0220]
……
[0221]
然后,从第n
‑
1张图像中采样车道线的特征点p
1,n
‑1,p
2,n
‑1,
……
p
m n
‑
1,n
‑1的三维坐标,其坐 标集合矩阵为:
[0222]
[st
n
‑1]=[(p
1,n
‑1,1)
t
,(p
2,n
‑1,1)
t
,
……
(p
m n
‑
1,n
‑1,1)
t
]
[0223]
即:
[0224][0225]
则有:
[0226][0227]
每个特征点的三维坐标的形式均为:p
i,n
‑1=(x
i,n
‑1,0,z
i,n
‑1),其中,z
i,n
‑1通过step1 中得到的第n
‑
1张图像中的车道线的拟合方程计算而得;
[0228]
最后,从第n张图像中采样车道线的特征点p
1,n
,p
2,n
,
……
p
m n,,n
的三维坐标;
[0229]
每个特征点的三维坐标的形式均为:p
i,n
=(x
i,n
,0,z
i,n
),其中,x
i,n
通过step1中得到 的第n张图像中的车道线的拟合方程计算而得。
[0230]
step3
‑
2,将第1~n张图像中选取的采样点的坐标统一到第n张图像的坐标系内:
[0231]
首先,t
n
‑1时刻对齐到t
n
时刻,即第n
‑
1张图像选取的采样点的坐标统一到第n张图像 的坐标系内:
[0232]
[st
n
‑
1,n
]=[rt]
n
‑
1,n
×
[st
n
‑1];[st
n
‑
1,n
]表示坐标集合矩阵[st
n
‑1]转换到第t
n
时刻的坐标系下 的坐标集合矩阵;[rt]
n
‑
1,n
表示从t
n
‑1到t
n
的[rt]矩阵(即第n
‑
1张图像到第n张
图像的[rt] 矩阵)。
[0233]
……
[0234]
然后,第t
f
时刻对齐到t
n
时刻:
[0235]
[st
f,n
]=[rt]
f,f 1
×
[rt]
f 1,f 2
……
[rt]
n
‑
2,n
‑1×
[rt]
n
‑
1,n
×
[st
f
];
[0236]
……
[0237]
最后,第t1时刻对齐到t
n
时刻:
[0238]
[st
1,n
]=[rt]
1,2
×
[rt]
2,3
……
[rt]
n
‑
2,n
‑1×
[rt]
n
‑
1,n
×
[st1]。
[0239]
step4,进行数据拟合。
[0240]
基于setp3得到的第1~n张图像的采样点统一到第n张图像的坐标系的坐标集合,采用 三次曲线进行拟合,能够得到车道线方程,每条车道线的形式仍然为:
[0241]
x=f(z)=a*z3 b*z2 c*z d。
[0242]
实施例二,实施例一建立了车道线时空拟合的基本方式,但是其效果在某些情况下表现 不佳:
[0243]
第一,第1~n张图像囊括的路程距离不能太长,实施例一的方式在10m左右;
[0244]
第二,拟合精度在距离太长时,精度不够。
[0245]
发明人团队对实施例一的方法进行了逐次分析,发现造成上述问题的核心在于:[rt]
f
‑
1,f
实施例一的方式,只有在
△
t足够小时,精度才能满足,这是其理论本身的瑕疵所在。
[0246]
对此,提出了实施例二的方案。
[0247]
与实施例一相比,区别体现在两方面:
[0248]
(一)如图4
‑
5所示,车道线时空拟合的系统方面,传感器视角变换关系求解子系统200 采用相机位姿求解模块203,不再采用:陀螺仪、轮速信息获取模块201、传感器姿态预测模 块202。
[0249]
同时,车道线特征提取子系统100、传感器视角变换关系求解子系统200均与车道图像 存储系统相互连通。
[0250]
具体而言,一种车道线时空拟合系统,包括:车道图像存储系统、车道线特征提取子系 统100、传感器视角变换关系求解子系统200、时序特征坐标系对齐子系统300、车道线拟合 子系统400;
[0251]
车道线特征提取子系统100、传感器视角变换关系求解子系统200的输出端分别与时序 特征坐标系对齐子系统300的输入端连接,时序特征坐标系对齐子系统300的输出端与车道 线拟合子系统400的输入端连接。
[0252]
对于相机位姿求解模块203而言,其用于通过对比两个时刻的图像信息的关键点,求解 出位姿变换。图像相比较惯导单元传感器,包含更丰富的信息;因此,发明人想到通过对比 两个时刻的图像信息的关键点,求解出位姿变换。
[0253]
对于传感器姿态预测模块203而言,其通过解析相邻前后2帧图像的特征性信息(如角 点),通过优化方法能够求解出相邻前后2帧间相机的位姿变化:
[0254]
设f
‑
1张图像中提取v个关键点的坐标:
[0255][0256]
第f张图像与第f
‑
1张图像中匹配的关键点的坐标点分别为:
[0257][0258]
即,第f
‑
1张图像任意第t个关键点q
t
与第f
‑
1张图像任意第t个关键点q
t
'对应,v≥4 (v取4,5,6,7,8,9,10,11,12,13
……
)
[0259]
将上述第f
‑
1张图像的v个关键点与第f张图像的v个关键点,代入下式:
[0260][0261]
由此可知:
[0262][0263]
设:
[0264]
矩阵:矩阵:
[0265]
则,[rt]
f
‑
1,f
=[q'][q]
‑1[0266]
(二)在拟合方法上,与实施例二的区别仅在于,step2的不同。
[0267]
step2,基于前后任意两张图像,即第f
‑
1图像与第f张图像的特征点来计算[rt]
f
‑
1,f
矩 阵:
[0268]
从第f
‑
1张图像中提取v个关键点,其坐标:
[0269][0270]
从第f张图像与第f
‑
1张图像中找到匹配的关键点,其坐标点分别为:
[0271][0272]
则满足以下矩阵:
[0273][0274]
其中,
[0275]
或者:
[0276][0277]
实施例三,实施例二的运算精度相比较实施例一而言,有了较大的提高。但是,其存在 一个问题,其运行步骤step2而言速度太慢,导致实施例二的运行速度跟不上实际要求。
[0278]
在相机位姿求解模块203中,需要对相邻前后2帧图像的特征信息进行匹配。特征以角 点为例,在没有201获取的外部信息输入的情况下,假设t
f
‑1时刻角点a在图像的坐标位置 为p(x,y,z),而t
f
时刻对应的图像出现的位置为p’(x’,y’,z’)。搜索p
‑‑
>p’是没有任何范围 约束的,即p’可能出现在图像的任意位置,甚至已经不在t时刻图像观测的范围内。
[0279]
这就导致,实施例二的方法在运行时特别慢(寻找p’费时)。
[0280]
实施例三的改变体现在step2上;
[0281]
如图6所示,一种车道线时空拟合系统,包括:车道图像存储系统、车道线特征提取子 系统100、传感器视角变换关系求解子系统200、时序特征坐标系对齐子系统300、车道线
拟 合子系统400;
[0282]
车道线特征提取子系统100、传感器视角变换关系求解子系统200的输出端分别与时序 特征坐标系对齐子系统300的输入端连接,时序特征坐标系对齐子系统300的输出端与车道 线拟合子系统400的输入端连接。
[0283]
传感器视角变换关系求解子系统200,包括:陀螺仪、轮速信息获取模块201,传感器姿 态预测模块202、相机位姿求解模块203。
[0284]
实施例三的拟合方式,相比较与实施例二而言,也是step2进行了改变:
[0285]
step2
‑
1,初步确定[rt]
f
‑
1,f,初步
,即利用陀螺仪、轮速信息获取模块201、传感器姿态预 测模块202计算[rt]
f
‑
1,f,初步
[0286]
基于惯导单元和车辆时速预测相机姿态变化,即通过车辆的运动速度v和车辆的角速度 w
y
信息,计算任意第f
‑
1图像与第f张图像之间的[rt]
f
‑
1,f,初步
[0287]
其中,w
y
表示绕水平面的转动的角速度;
[0288][0289]
其中,δt=t
f
‑
t
f
‑1,v为t
f
‑1时刻的车速,w
y
为t
f
‑1时刻的角速度。
[0290]
step2
‑
2,基于前后任意两张图像,即第f
‑
1图像与第f张图像的特征点来计算[rt]
f
‑
1,f
矩阵:
[0291]
从第f
‑
1张图像中提取v个关键点,其坐标:
[0292][0293]
则上述v个关键点在第f张图像中的坐标初步确定为:
[0294][0295]
以上述v个关键点在第f张图像中的坐标初步确定点为圆心,半径为10cm,从第f张图 像与第f
‑
1张图像中找到匹配的关键点,其坐标点分别为:
[0296][0297]
则满足以下矩阵:
[0298][0299]
其中,
[0300]
或者:
[0301][0302]
实施例三在运行时,有了匹配点的初步范围,其在寻找时效率大增,运行时间大幅节约。
[0303]
实施例四,无论是实施例一、实施例二、实施例三,其技术方案仍然存在一个问题:精 度不足的问题。
[0304]
对此,提出了下列方案:
[0305]
将实施例一、二、三中的:时序特征坐标系对齐子系统300进行了修改。
[0306]
如图7所示,时序特征坐标系对齐子系统300包括,时序特征坐标系变换模块301,时 序特征拼接模块302。
[0307]
对于时序特征坐标系变换模块301而言,其功能并没有改变。
[0308]
增加的“时序特征拼接模块302”,其功能在于:
[0309]
对单帧的检测车道线信息,转到同一个坐标系下。应当是:离摄像头越近,可信度越高, 权重越高;距离当前时刻越近,可信度越高。并且,图像的时间可信度高于图像中距离可信 度(其实质是:t
f
‑1图像的权重区间小于t
f
图像的权重区间)。
[0310]
这是实施例四的核心构思。
[0311]
具体而言,权重l采用下式求解:
[0312]
[0313]
γ表示参数,其大小在[0,1],一般取0.1。
[0314]
u表示调节权重的参数,可取1.0
[0315]
如图8所示,γ=0.1,u=1.0,t1=1s,t
n
=5s。对比了t
x
=1.1s,t
x
=3s,t
x
=5s下的不同z 值下的权重l。
[0316]
特别注意的是,z为tx时刻下的坐标系下的z值,而非在统一坐标系下的结果。
[0317]
将时序特征坐标系变换模块301得到的从t1~t
n
‑1时刻的每张图像中采样车道线的特征点, 构建坐标矩阵集合,计算每个特征点的权重。
[0318]
上述在拟合方法上,增加step3,计算各个采样点的权重。
[0319]
<车道线拟合子系统400>
[0320]
根据“时序特征坐标系变换模块301得到的n张图像中的车道线采样点在当前t
n
时刻下 的坐标系的点集”,“时序特征拼接模块302得到的n张图像的采样点的权重”进行拟合, 拟合时仍然采用三次曲线进行拟合:
[0321]
x=f(z)=a*z3 b*z2 c*z d。
[0322]
加权拟合的数学实现上,可以通过matlab程序实现,或者采用:张永吉.曲线拟合中的 加权处理[j].计算机与应用化学,1994,011(003):238
‑
240来实现。
[0323]
站位到实施例四的方案上看,实施例一、实施例二、实施例三实质上是l=0的一种特别 形式。
[0324]
实施例五,基于实施例一、实施例二、实施例三、实施例四的方法,提出了一种辅助驾 驶系统。
[0325]
一种辅助驾驶系统,包括前述的车道线时空拟合系统,显示屏;车道线时空拟合系统利 用车道线拟合子系统400得到的车道拟合方程,在显示屏上显示预测的车道线。
[0326]
各个方法的对比
[0327][0328]
以上所举实施例为本发明的较佳实施方式,仅用来方便说明本发明,并非对本发明作任 何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本发明所提技术特征的 范围内,利用本发明所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本发 明的技术特征内容,均仍属于本发明技术特征的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
