1.本发明涉及一种生成供作业车辆自动行驶的目标行驶路径的路径生成系统。
背景技术:
2.上述的路径生成系统用于自动行驶系统,该自动行驶系统采用卫星定位系统,获取作业车辆的当前位置,并使作业车辆沿着路径生成系统中生成的目标行驶路径进行自动行驶(例如参见专利文献1。)。
3.专利文献1中记载的系统中,针对个人电脑等远程操作终端,输入安装于作业车辆的作业机的种类、宽度等各种信息,基于其输入信息,生成目标行驶路径。作为目标行驶路径,例如包含平行排列的多个直线路径、以及将相邻的直线路径彼此连结的多个连结路径。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2016-95658号公报
技术实现要素:
7.专利文献1中记载的系统中,为了生成目标行驶路径,需要进行作业机的种类、宽度等各种信息的输入作业。据此,在利用自动行驶开始作业时,必须进行各种信息的输入作业,无法顺利地开始作业,导致作业效率降低。
8.另外,还基于用户等对作业车辆进行驾驶操作而使作业车辆实际行驶时的移动轨迹等来生成基准路径,从而生成与该基准路径相对应的目标行驶路径。这种情况下,例如生成与基准路径平行排列的多个平行路径,并生成将相邻的基准路径和平行路径或者相邻的平行路径彼此连结的多个连结路径,由此生成包含基准路径、平行路径及连结路径在内的目标行驶路径。
9.然而,即便这种情况下,当设定相邻的平行路径的间隔时,也需要作业机的种类、宽度等信息,因此,用户等必须输入这些信息。另外,即便输入这些信息,也有可能无法将相邻的平行路径的间隔设定为用户等意图实现的所期望的间隔。
10.鉴于上述实际情况,本发明的主要课题在于:提供无需进行作业机的种类、宽度等的各种输入作业而能够生成用户等意图实现的所期望的目标行驶路径的路径生成系统。
11.本发明的第一特征构成在于,具备:行驶路径生成部,该行驶路径生成部生成用于供作业车辆自动行驶的目标行驶路径;以及基准点设定部,该基准点设定部基于使所述作业车辆行驶时的所述作业车辆的位置信息,来设定第一基准线生成用的第一基准点及第二基准点、和间隔设定用的第三基准点,在所述行驶路径生成部中,作为所述目标行驶路径,生成包含与基于所述第一基准点及所述第二基准点的第一基准线平行的多个平行路径在内的路径,并基于所述第二基准点与所述第三基准点之间的距离来设定第一基准线与平行路径之间的间隔及平行路径彼此之间的间隔。
12.根据本构成,在用户等使作业车辆行驶时,能够利用基准点设定部来设定第一~
第三基准点。行驶路径生成部不仅生成与基于第一基准点及第二基准点的第一基准线平行的多个平行路径,还基于第二基准点与第三基准点之间的距离来设定第一基准线与平行路径之间的间隔及平行路径彼此之间的间隔。由此,即便用户等不进行将作业装置的种类、宽度等各种信息输入的输入作业,只要设定第一~第三基准点,也能够生成目标行驶路径。并且,第一~第三基准点可以在用户等使作业车辆行驶时设定,因此,能够生成平行路径的路径长度、相邻的平行路径彼此的间隔等用户等意图实现的所期望的目标行驶路径。
13.本发明的第二特征构成在于,所述基准点设定部基于所述作业车辆所具备的操作件的操作,来设定所述第一基准点、所述第二基准点及所述第三基准点。
14.根据本构成,通过用户等对操作件进行操作,基准点设定部能够与该操作相对应地设定第一~第三基准点。由此,只要在用户等所期望的地点对操作件进行操作,就能够适当地生成用户等意图实现的所期望的目标行驶路径,易于使用。
15.本发明的第三特征构成在于,所述基准点设定部基于所述作业车辆的动作状态,来设定所述第一基准点、所述第二基准点及所述第三基准点。
16.根据本构成,基准点设定部能够与作业车辆的动作状态相对应地自动设定第一~第三基准点,因此,无需用户等的操作,能够减轻用户等的作业负担,并且,适当地生成目标行驶路径。
17.本发明的第四特征构成在于,具备作业区域信息获取部,该作业区域信息获取部获取与所述第一基准点、所述第二基准点及所述第三基准点所属的作业区域相关的作业区域信息,所述行驶路径生成部在利用由所述作业区域信息获取部获取到的作业区域信息而确定的作业区域内生成所述目标行驶路径。
18.根据本构成,行驶路径生成部不仅考虑第一~第三基准点,还考虑作业区域信息获取部获取的与第一~第三基准点所属的作业区域相关的作业区域信息之后,在该作业区域内生成目标行驶路径,因此,能够生成不会脱离作业区域的适当的目标行驶路径。并且,关于作业区域信息,即便用户等不进行登记的作业,也能够利用作业区域信息获取部而获取,因此,还能够减轻用户等的作业负担。
19.本发明的第五特征构成在于,具备:通知位置确定部,该通知位置确定部基于所述第一基准点、所述第二基准点及所述作业区域信息,来确定进行端部通知的通知位置,该端部通知是对接近于作业区域的端部的接近状态进行通知;以及端部通知控制部,在所述作业车辆进行自动行驶的情况下,当所述作业车辆的当前位置到达所述通知位置时,该端部通知控制部进行所述端部通知。
20.根据本构成,通知位置确定部不仅基于第一基准点及第二基准点还基于作业区域信息来确定进行端部通知的通知位置,因此,能够确定与作业区域的形状等作业区域的状况相对应的通知位置。由此,在作业车辆进行自动行驶的情况下,端部通知控制部能够在适当的通知位置进行端部通知,因此,能够将处于接近状态的情况在适当的时机通知给用户等。据此,能够防止作业车辆脱离到作业区域外等不良情况于未然。
21.本发明的第六特征构成在于,所述基准点设定部构成为:能够基于使所述作业车辆行驶时的所述作业车辆的位置信息,来设定与所述第一基准线不同的第二基准线生成用的第四基准点,所述行驶路径生成部随着规定条件的成立而选择所述第一基准线及所述第二基准线中的任一基准线,生成包含与根据所述作业车辆的当前位置而选择的基准线平行
的追加路径在内的路径,来作为所述目标行驶路径。
22.根据本构成,利用基准点设定部来设置第四基准点,由此,行驶路径生成部不仅能够选择第一基准线,还能够选择第二基准线,生成与第一基准线或第二基准线相对应的追加路径。由此,能够根据作业区域的状况等各种状况而生成与第一基准线相对应的追加路径或者生成与第二基准线相对应的追加路径,因此,能够应对各种状况,而且,无需进行作业机的种类、宽度等的各种输入作业就能够进行作业车辆的自动行驶。
附图说明
23.图1是表示自动行驶系统的概要构成的图。
24.图2是表示自动行驶系统的概要构成的框图。
25.图3是表示生成目标行驶路径时的作业区域的图。
26.图4是表示生成目标行驶路径时的作业区域的图。
27.图5是表示生成目标行驶路径时的作业区域的图。
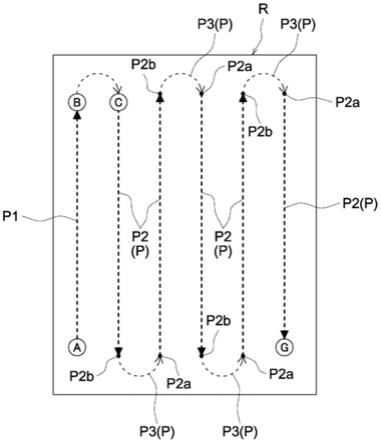
28.图6是表示生成了目标行驶路径的状态下的作业区域的图。
29.图7是表示进行自动行驶时的动作流程的流程图。
30.图8是表示生成追加路径时的作业区域的图。
31.图9是表示生成了追加路径的状态下的作业区域的图。
32.图10是表示进行自动行驶时的动作流程的流程图。
33.图11是表示第二实施方式中的自动行驶系统的概要构成的框图。
34.图12是表示第二实施方式中的生成了目标行驶路径的状态下的作业区域的图。
35.图13是表示远距离控制器的图。
36.图14是表示第三实施方式中的生成了目标行驶路径的状态下的作业区域的图。
37.图15是表示第三实施方式中的生成目标行驶路径时的作业区域的图。
38.图16是表示第三实施方式中的生成目标行驶路径时的作业区域的图。
具体实施方式
39.基于附图,对应用了本发明所涉及的路径生成系统的自动行驶系统的实施方式进行说明。
40.〔第一实施方式〕
41.对于该自动行驶系统,如图1所示,作为作业车辆,应用了拖拉机1,不过,还可以应用于拖拉机以外的、乘用插秧机、联合收割机、乘用割草机、轮式装载机、除雪车等乘用作业车辆、以及无人割草机等无人作业车辆。
42.如图1及图2所示,该自动行驶系统具备:自动行驶单元2,其搭载于拖拉机1;以及便携式通信终端3,其以能够与自动行驶单元2通信的方式进行通信设定。便携式通信终端3可以采用具有可触摸操作的触摸面板式显示部51(例如液晶面板)等的平板型个人电脑、智能手机等。
43.拖拉机1具备行驶机体7,该行驶机体7具有:可驱动的作为转向操纵轮发挥作用的左右前轮5、以及可驱动的左右后轮6。在行驶机体7的前侧配置有发动机盖8,在发动机盖8内具备具有共轨系统的电子控制式柴油发动机(以下称为发动机)9。在行驶机体7的比发动
机盖8更靠后侧的位置具备形成搭乘式驾驶部的驾驶室10。
44.在行驶机体7的后部,能够借助3点连杆机构11而以可升降且可旋转的方式连结作为作业装置12的一例的旋耕装置。在拖拉机1的后部,也可以连结割草机、犁地机、播种装置、撒布装置等各种作业装置12,来代替旋耕装置。
45.如图2所示,拖拉机1具备如下部件等:电子控制式变速装置13,其对来自发动机9的动力进行变速;全液压式动力转向机构14,其对左右前轮5进行转向操纵;左右的侧制动器(未图示),它们对左右后轮6进行制动;电子控制式制动器操作机构15,其能够对左右的侧制动器进行液压操作;作业离合器(未图示),其使朝向旋耕装置等作业装置12的动力传递进行接通断开;电子控制式离合器操作机构16,其能够对作业离合器进行液压操作;电子液压控制式升降驱动机构17,其对旋耕装置等作业装置12进行升降驱动;车载电子控制单元18,其具有与拖拉机1的自动行驶等相关的各种控制程序等;车速传感器19,其对拖拉机1的车速进行检测;转向角传感器20,其对前轮5的转向操纵角进行检测;以及定位单元21,其对拖拉机1的当前位置及当前方位进行测定。
46.应予说明,发动机9可以采用具备电子调速器的电子控制式汽油发动机。变速装置13可以采用液压机械式无级变速装置(hmt)、静液压式无级变速装置(hst)或带式无级变速装置等。动力转向机构14可以采用具备电动马达的电动式动力转向机构14等。
47.如图1所示,驾驶室10的内部具备:转向盘38,其能够借助动力转向机构14(参照图2)而对左右前轮5进行手动转向操纵;搭乘者用的驾驶座39;触摸面板式显示部;以及各种操作件等。
48.如图2所示,车载电子控制单元18具有如下部件等:变速控制部181,其对变速装置13的工作进行控制;制动控制部182,其对左右的侧制动器的工作进行控制;作业装置控制部183,其对旋耕装置等作业装置12的工作进行控制;转向操纵角设定部184,其在自动行驶时设定左右前轮5的目标转向操纵角并向动力转向机构14输出;以及非易失性车载存储部185,其对所生成的自动行驶用的目标行驶路径p(例如参照图6)等进行存储。
49.如图2所示,定位单元21具备如下部件等:卫星导航装置22,其利用作为卫星定位系统(nss:navigation satellite system)的一例的gps(global positioning system)来测定拖拉机1的当前位置和当前方位;以及惯性测量装置(imu:inertial measurement unit)23,其具有3轴陀螺仪及3方向加速度传感器等而对拖拉机1的姿势、方位等进行测定。利用了gps的定位方法有:dgps(differential gps:相对定位方式)、rtk-gps(real time kinematic gps:干扰定位方式)等。本实施方式中,采用适合于移动体定位的rtk-gps。因此,如图1及图2所示,在田地周边的已知位置设置有能够利用rtk-gps进行定位的基站4。
50.如图2所示,拖拉机1和基站4分别具备如下部件等:定位天线24、61,它们接收从定位卫星71(参照图1)发送来的电波;以及通信模块25、62,它们能够在拖拉机1与基站4之间进行包含定位信息(校正信息)在内的各种信息的无线通信。由此,卫星导航装置22能够基于拖拉机侧的定位天线24接收来自定位卫星71的电波而得到的定位信息、和基站侧的定位天线61接收来自定位卫星71的电波而得到的定位信息(用于测定拖拉机1的当前位置的校正信息),以高精度测定拖拉机1的当前位置及当前方位。另外,定位单元21具备卫星导航装置22和惯性测量装置23,由此能够高精度地测定拖拉机1的当前位置、当前方位、姿势角(偏航角、翻滚角、俯仰角)。
51.如图1所示,拖拉机1所具备的定位天线24、通信模块25及惯性测量装置23收纳于天线单元80。天线单元80配置于驾驶室10的前表面侧的上部位置。
52.如图2所示,便携式通信终端3具备如下部件等:终端电子控制单元52,其具有对显示部51等的工作进行控制的各种控制程序等;以及通信模块53,其能够在与拖拉机侧的通信模块25之间进行包含定位信息在内的各种信息的无线通信。终端电子控制单元52具有如下部件等:行驶路径生成部54,其生成用于供拖拉机1自动行驶的目标行驶路径p(例如参照图6);以及非易失性终端存储部55,其对用户输入的各种输入信息、行驶路径生成部54生成的目标行驶路径p等进行存储。
53.下文中,对利用行驶路径生成部54生成目标行驶路径p的方法进行说明。行驶路径生成部54所生成的目标行驶路径p能够显示于显示部51,并作为路径信息而存储于终端存储部55。路径信息包括:目标行驶路径p的方位角及与目标行驶路径p中的拖拉机1的行驶方式等相对应地设定的设定发动机旋转速度、目标行驶速度等。
54.由此,当行驶路径生成部54生成目标行驶路径p时,终端电子控制单元52将路径信息从便携式通信终端3向拖拉机1移送,由此拖拉机1的车载电子控制单元18能够获取路径信息。车载电子控制单元18能够基于获取到的路径信息而利用定位单元21获取自己的当前位置(拖拉机1的当前位置),并且,使拖拉机1沿着目标行驶路径p进行自动行驶。将利用定位单元21获取的拖拉机1的当前位置实时(例如数毫秒周期)从拖拉机1向便携式通信终端3发送,利用便携式通信终端3掌握拖拉机1的当前位置。
55.在进行拖拉机1的自动行驶的情况下,当满足各种自动行驶开始条件时,用户对便携式通信终端3的显示部51进行操作,指示自动行驶的开始。车载电子控制单元18接收自动行驶的开始指示,由此边利用定位单元21获取自己的当前位置(拖拉机1的当前位置)边进行使拖拉机1沿着目标行驶路径p进行自动行驶的自动行驶控制。车载电子控制单元18构成为下述自动行驶控制部:基于采用卫星定位系统并利用定位单元21获取的拖拉机1的定位信息,进行使拖拉机1沿着目标行驶路径p进行自动行驶的自动行驶控制。
56.自动行驶控制包括:对变速装置13的工作进行自动控制的自动变速控制、对制动器操作机构15的工作进行自动控制的自动制动控制、对左右前轮5进行自动转向操纵的自动转向操纵控制、以及对旋耕装置等作业装置12的工作进行自动控制的作业用自动控制等。
57.自动变速控制中,变速控制部181基于包含目标行驶速度在内的目标行驶路径p的路径信息、定位单元21的输出以及车速传感器19的输出,对变速装置13的工作进行自动控制,以便得到与目标行驶路径p中的拖拉机1的行驶方式等相对应地设定的目标行驶速度作为拖拉机1的车速。
58.自动制动控制中,制动控制部182基于目标行驶路径p和定位单元21的输出,对制动器操作机构15的工作进行自动控制,以便左右的侧制动器在目标行驶路径p的路径信息所包含的制动区域中对左右后轮6适当地进行制动。
59.自动转向操纵控制中,转向操纵角设定部184基于目标行驶路径p的路径信息和定位单元21的输出,求出左右前轮5的目标转向操纵角并进行设定,且将设定的目标转向操纵角向动力转向机构14输出,以便拖拉机1在目标行驶路径p自动行驶。动力转向机构14基于目标转向操纵角和转向角传感器20的输出,对左右前轮5进行自动转向操纵,以便得到目标
转向操纵角作为左右前轮5的转向操纵角。
60.作业用自动控制中,作业装置控制部183基于目标行驶路径p的路径信息和定位单元21的输出,对离合器操作机构16及升降驱动机构17的工作进行自动控制,以便随着拖拉机1到达目标行驶路径p的作业开始地点而开始作业装置12的规定作业(例如耕耘作业),并且,随着拖拉机1到达目标行驶路径p的作业结束地点而停止作业装置12的规定作业。
61.像这样,拖拉机1中,通过变速装置13、动力转向机构14、制动器操作机构15、离合器操作机构16、升降驱动机构17、车载电子控制单元18、车速传感器19、转向角传感器20、定位单元21以及通信模块25等而构成自动行驶单元2。
62.该实施方式中,不仅能够在没有用户等搭乘于驾驶室10的状态下使拖拉机1自动行驶,还能够在用户等搭乘于驾驶室10的状态下使拖拉机1自动行驶。据此,不仅能够在没有用户等搭乘于驾驶室10的状态下利用车载电子控制单元18的自动行驶控制使拖拉机1沿着目标行驶路径p进行自动行驶,即便用户等搭乘于驾驶室10的情况下,也能够利用车载电子控制单元18的自动行驶控制使拖拉机1沿着目标行驶路径p进行自动行驶。
63.在用户等搭乘于驾驶室10的情况下,能够在利用车载电子控制单元18使拖拉机1自动行驶的自动行驶状态与基于用户等的驾驶而使拖拉机1行驶的手动行驶状态之间进行切换。据此,在以自动行驶状态在目标行驶路径p自动行驶的途中,能够从自动行驶状态切换为手动行驶状态,反之,在以手动行驶状态进行行驶的途中,能够从手动行驶状态切换为自动行驶状态。关于手动行驶状态与自动行驶状态的切换,例如可以在驾驶座39的附近具备用于在自动行驶状态与手动行驶状态之间进行切换的切换操作部,并且,还可以使该切换操作部显示于便携式通信终端3的显示部51。另外,在车载电子控制单元18的自动行驶控制中,当用户对转向盘38进行操作时,能够从自动行驶状态切换为手动行驶状态。
64.如图1及图2所示,拖拉机1具备障碍物监测系统100,其用于对拖拉机1(行驶机体7)周围的障碍物进行监测,避免与障碍物之间的碰撞。障碍物监测系统100具备:多个雷达传感器101、102,它们能够采用激光以三维方式测定至测定对象物为止的距离;声纳单元103、104,它们具有能够采用超声波来测定至测定对象物为止的距离的多个声纳;障碍物监测部110;以及碰撞避免控制部111。
65.利用雷达传感器101、102及声纳单元103、104进行测定的测定对象物设为物体或人等。雷达传感器101、102具备:以拖拉机1的前侧为测定对象的前方雷达传感器101、以及以拖拉机1的后侧为测定对象的后方雷达传感器102。声纳单元103、104具备:以拖拉机1的右侧为测定对象的右侧的声纳单元103、以及以拖拉机1的左侧为测定对象的左侧的声纳单元104。
66.障碍物监测部110构成为进行障碍物监测处理,即,基于雷达传感器101、102及声纳单元103、104的测定信息,将规定距离内的物体或人等测定对象物监测为障碍物。碰撞避免控制部111构成为进行碰撞避免控制,即,当利用障碍物监测部110监测到障碍物时,使拖拉机1减速或使拖拉机1停止行驶。碰撞避免控制部111在碰撞避免控制中,不仅使拖拉机1减速或使拖拉机1停止行驶,还使通知蜂鸣器、通知灯等通知装置26工作,通知存在障碍物。碰撞避免控制部111在碰撞避免控制中,采用通信模块25、53,从拖拉机1向便携式通信终端3通信,使障碍物的存在显示于显示部51,由此能够通知存在障碍物。
67.障碍物监测部110基于雷达传感器101、102及声纳单元103、104的测定信息,实时
地反复进行障碍物监测处理,适当地监测物体或人等障碍物。碰撞避免控制部111进行用于避免与实时地监测的障碍物之间的碰撞的碰撞避免控制。
68.障碍物监测部110及碰撞避免控制部111配备于车载电子控制单元18。车载电子控制单元18借助can(controller area network)而以能够通信的方式与共轨系统中包含的发动机用的电子控制单元、雷达传感器101、102及声纳单元103、104等连接。
69.以下,对利用行驶路径生成部54生成目标行驶路径p的方法进行说明。
70.用户等进行驾驶操作,使拖拉机1在作业区域r内行驶并实际地进行作业,由此,行驶路径生成部54生成目标行驶路径p。
71.如图3~图5所示,作业区域r中,通过用户等的手动驾驶使拖拉机1行驶,分别登记地点a(相当于第一基准点)、地点b(相当于第二基准点)、地点c(相当于第三基准点)。为了对地点a~c进行登记,如图2所示,具备:基准点设定部56,其设定地点a~地点c;人为操作式的基准点设定用操作部57;以及动作状态监测部27,其对拖拉机1的动作状态进行监测。基准点设定部56及基准点设定用操作部57配备于便携式通信终端3,动作状态监测部27配备于拖拉机1。
72.首先,如图3及图4所示,使拖拉机1边从地点a行驶至地点b边利用作业装置12进行作业。此时,基准点设定部56基于基准点设定用操作部57的操作,将作业的开始地点设定为地点a,将作业的结束地点设定为地点b。虽然省略图示,不过,基准点设定用操作部57显示于例如便携式通信终端3的显示部51,并具备地点a用的操作部、地点b用的操作部以及地点c用的操作部。在进行自动行驶的情况下,由于在驾驶座39的附近所配置的终端保持部等设置有便携式通信终端3,所以基准点设定用操作部57成为配备于拖拉机1(作业车辆)的操作件。
73.基准点设定用操作部57不限于显示于便携式通信终端3的显示部51,可以应用各种操作部。例如,还可以显示于拖拉机1的显示部,或者采用在拖拉机1的驾驶座39的附近所配置的操作开关、操作按钮。另外,下文中进行说明,还可以将图13所示的远距离控制器200作为基准点设定用操作部57,搭乘于拖拉机1的用户等可以携带基准点设定用操作部57(远距离控制器200)。
74.当拖拉机1位于作业的开始地点时,如果用户等对基准点设定用操作部57的地点a用的操作部进行操作,则基准点设定部56获取其操作时刻的定位单元21的位置信息(拖拉机1的位置信息),在作业区域r设定地点a(根据纬度、经度确定的地点)。另外,当拖拉机1到达作业的结束地点时,如果用户等对基准点设定用操作部57的地点b用的操作部进行操作,则基准点设定部56基于其操作时刻的定位单元21的位置信息(拖拉机1的位置信息),在作业区域r设定地点b(根据纬度、经度确定的地点)。
75.接下来,如图4及图5所示,使拖拉机1在没有进行作业装置12的作业的状态下从地点b转弯行驶至地点c,在地点c使其开始进行作业装置12的作业。此时,基准点设定部56也是基于基准点设定用操作部57的操作,将下一个作业开始地点设定为地点c。如果拖拉机1到达下一个作业开始地点而用户等对基准点设定用操作部57的地点c用的操作部进行操作,则基准点设定部56基于其操作时刻的定位单元21的位置信息(拖拉机1的位置信息),在作业区域r设定地点c(根据纬度、经度确定的地点)。
76.像这样,基准点设定部56与基准点设定用操作部57的操作时机相对应地,利用定
位单元21获取拖拉机1的位置信息,在作业区域r分别设定地点a、地点b及地点c。基准点设定部56使地点a~地点c的设定信息存储于车载存储部185。
77.即便不进行基准点设定用操作部57的操作,基准点设定部56基于动作状态监测部27的监测信息,也能够利用定位单元21获取拖拉机1的位置信息,在作业区域r自动地分别设定地点a、地点b及地点c。
78.在拖拉机1开始作业装置12的作业的情况下,利用升降驱动机构17使作业装置12升降到作业高度,并利用离合器操作机构16对作业离合器进行on操作。另外,在拖拉机1结束作业装置12的作业的情况下,利用升降驱动机构17使作业装置12升降到与作业高度不同的非作业高度,并利用离合器操作机构16对作业离合器进行off操作。由此,通过对离合器操作机构16及升降驱动机构17的工作状态的变化进行监测,能够掌握拖拉机1开始了作业装置12的作业的作业开始时刻及拖拉机1结束了作业装置12的作业的作业结束时刻。
79.动作状态监测部27对例如离合器操作机构16及升降驱动机构17的工作状态等拖拉机1的各种动作进行监测。基准点设定部56基于动作状态监测部27的监测信息,对动作的变化进行监视,通过具有与作业开始相对应的动作的变化(离合器操作机构16及升降驱动机构17的工作状态的变化)来确定作业开始时刻,并通过具有与作业结束相对应的动作的变化来确定作业结束时刻。
80.首先,基准点设定部56在基于动作状态监测部27的监测信息来确定作业开始时刻之时,基于其确定时刻的定位单元21的位置信息(拖拉机1的位置信息),在作业区域r设定地点a。接下来,基准点设定部56在基于动作状态监测部27的监测信息来确定作业结束时刻之时,基于其确定时刻的定位单元21的位置信息,在作业区域r设定地点b。接下来,基准点设定部56在基于动作状态监测部27的监测信息来确定作业开始时刻之时,基于其确定时刻的定位单元21的位置信息,在作业区域r设定地点c。
81.如上所述,在基准点设定部56基于基准点设定用操作部57的操作或动作状态监测部27的监测信息而在作业区域r设定地点a~地点c之时,行驶路径生成部54基于地点a~地点c而生成目标行驶路径p。
82.当行驶路径生成部54生成目标行驶路径p时,利用作业区域信息获取部58(参照图2)获取与地点a~地点c所属的作业区域r相关的作业区域信息。作业区域信息包括:例如用于确定作业区域r的识别信息、作业区域r的位置信息及作业区域r的形状信息。外部的管理装置(数据库)中,对多个作业区域r各自中的作业区域信息进行管理。对于管理装置,例如,根据数据库等中所存储的地图信息等获取作业区域信息、或者根据测量作业区域的形状等时的测量信息等获取作业区域信息、或者采用各种方法而获取多个作业区域r各自中的作业区域信息,来进行管理。
83.作业区域信息获取部58将地点a~地点c各自中的位置信息借助通信装置等而向管理装置传达,管理装置基于地点a~地点c各自中的位置信息,从多个作业区域r中确定属于地点a~地点c的作业区域r。管理装置将与确定的作业区域r相关的作业区域信息借助通信装置等而向作业区域信息获取部58传达。像这样,作业区域信息获取部58获取与地点a~地点c所属的作业区域r相关的作业区域信息。
84.顺便说一下,不存在利用作业区域信息获取部58进行传达的地点a~地点c各自的位置信息所属的作业区域r的情况下,管理装置将地点a~地点c的登记错误向作业区域信
息获取部58传达。由此,作业区域信息获取部58使地点a~地点c的登记错误显示于显示部51等,向用户等通知登记错误。该登记错误的情况下,再次进行地点a~地点c的登记。
85.如图6所示,行驶路径生成部54中,在利用由作业区域信息获取部58获取到的作业区域信息而确定的作业区域r内,生成包含与基于地点a及地点b的第一基准线p1平行的多个平行路径p2在内的路径,来作为目标行驶路径p,并基于地点b与地点c之间的距离来设定第一基准线p1与平行路径p2之间的间隔及平行路径p2彼此之间的间隔。行驶路径生成部54生成将地点a和地点b连结的直线作为第一基准线p1。也可以使该第一基准线p1预先作为供拖拉机1自动行驶的第一基准路径而存储于车载存储部185。行驶路径生成部54在沿着将地点b和地点c连结的直线的方向上以相当于地点b与地点c之间的距离隔开间隔地平行并列设置多个长度与第一基准线p1相同或大致相同的路径,由此生成以遍及作业区域r整体的状态到达目标地点g为止的多个平行路径p2。多个平行路径p2成为:使拖拉机1边自动行驶边进行规定作业的路径。
86.如图6所示,行驶路径生成部54除了生成平行路径p2以外,还生成连结路径p3。行驶路径生成部54生成将相邻的平行路径p2彼此连结的多个连结路径p3。连结路径p3成为:不进行作业而用于使拖拉机1的行驶方向转换的路径。
87.像这样,行驶路径生成部54生成多个平行路径p2和多个连结路径p3,由此,拖拉机1能够在多个平行路径p2往复行驶,同时生成进行规定作业的目标行驶路径p。据此,即便用户等不进行输入作业装置12的种类、宽度等各种信息的输入作业,只要登记地点a~地点c,也能够生成目标行驶路径p。并且,地点a~地点c各自可以设为与用户等通过手动驾驶进行的实际作业相对应的地点,能够生成平行路径p2的路径长度、相邻的平行路径p2彼此的间隔等用户等意图实现的所期望的目标行驶路径p。
88.当行驶路径生成部54生成目标行驶路径p时,终端电子控制单元52将路径信息从便携式通信终端3向拖拉机1移送,由此拖拉机1的车载电子控制单元18获取路径信息。据此,车载电子控制单元18能够基于获取的路径信息,利用定位单元21获取自己的当前位置(拖拉机1的当前位置),并且,使拖拉机1沿着目标行驶路径p进行自动行驶。由定位单元21获取的拖拉机1的当前位置被实时地(例如数毫秒周期)从拖拉机1向便携式通信终端3发送,利用便携式通信终端3掌握拖拉机1的当前位置。例如,在拖拉机1的自动行驶中,使目标行驶路径p的与行驶方向正交的方向上的拖拉机1的当前位置与目标行驶路径p之间的偏差(横向偏差)显示于便携式通信终端3的显示部51或拖拉机1的显示部。据此,在拖拉机1的自动行驶中,用户等能够掌握拖拉机1的位置相对于目标行驶路径p偏离何种程度。
89.基于图7的流程图,对进行自动行驶时的动作流程进行说明。
90.首先,如图3~图5所示,通过用户等的手动驾驶,使拖拉机1在作业区域r内行驶,并实际上进行作业,利用基准点设定部56进行地点a~地点c的登记(设定)(步骤#1、步骤#2)。作业区域信息获取部58基于地点a~地点c的登记信息(位置信息),获取地点a~地点c所属的作业区域r的作业区域信息,行驶路径生成部54如图6所示生成包含多个平行路径p2及多个连结路径p3在内的目标行驶路径p(步骤#3、步骤#4)。
91.当满足各种自动行驶开始条件,用户利用便携式通信终端3对显示部51进行操作,指示开始自动行驶时,如图6所示,车载电子控制单元18基于采用卫星定位系统并利用定位单元21获取的拖拉机1的定位信息,进行使拖拉机1沿着作业区域r内的目标行驶路径p进行
自动行驶的自动行驶控制(在步骤#5为yes的情况下,移至步骤#6)。
92.自动行驶控制中,车载电子控制单元18以在多个平行路径p2的起始位置p2a开始作业装置12的作业、并在多个平行路径p2的结束位置p2b结束作业装置12的作业的方式,使拖拉机1沿着多个平行路径p2分别进行自动直线行驶。关于连结路径p3,车载电子控制单元18以不进行作业装置12的作业的方式,使拖拉机1沿着多个连结路径p3分别进行自动转弯行驶。车载电子控制单元18以使其从平行路径p2紧接着连结路径p3进行自动行驶且从连结路径p3紧接着平行路径p2进行自动行驶的方式,使拖拉机1自动行驶至目标地点g。
93.如上所述,车载电子控制单元18虽然在连结路径p3也使拖拉机1自动行驶,不过,还可以在连结路径p3通过用户等的手动操作使拖拉机1进行手动驾驶。这种情况下,在平行路径p2的结束位置p2b从自动驾驶切换为手动驾驶,当拖拉机1的行驶方向上的方位和平行路径p2的延伸设置方向上的方位处于规定范围内等各种自动行驶开始条件成立而指示开始自动行驶时,从手动驾驶切换为自动驾驶,拖拉机1沿着下一个平行路径p2进行自动行驶。在进行手动驾驶的情况下,通过使拖拉机1的当前位置和平行路径p重叠显示于便携式通信终端3的显示部51或拖拉机1的显示部,能够将手动驾驶的拖拉机1朝向平行路径p2引导。像这样,在针对连结路径p3使拖拉机1进行手动驾驶的情况下,行驶路径生成部54还可以不生成连结路径p3而仅生成平行路径p2。
94.当作业区域r中的作业结束而满足设定信息清除条件时,车载电子控制单元18将车载存储部185中所存储的地点a~地点c的设定信息清除。由此,能够登记下一个作业区域r中的地点a~地点c。对于设定信息清除条件,例如可以设定:拖拉机1移动到作业区域r外、或从自动行驶的结束起经过了设定时间等各种条件。
95.在自动行驶中,将拖拉机1接近于作业区域r的端部等的接近状态通知给用户等,以便防止拖拉机1脱离到作业区域r外。如图2所示,具备:通知位置确定部59,该通知位置确定部59基于地点a、地点b、作业区域信息获取部58所获取的作业区域信息,来确定进行端部通知的通知位置,该端部通知是对接近于作业区域r的端部的接近状态进行通知;以及端部通知控制部186,在拖拉机1进行自动行驶的情况下,当拖拉机1的当前位置到达通知位置时,该端部通知控制部186进行端部通知。
96.通知位置确定部59配备于便携式通信终端3,如图6所示,基于地点a及地点b的位置信息,将多个平行路径p2各自的结束位置p2b确定为通知位置。例如,通知位置确定部59可以在平行路径p2上将与地点a及地点b相同的位置确定为通知位置。通知位置确定部59除了确定结束位置p2b,还可以基于作业区域信息(特别是作业区域r的端部的位置信息)而将相对于作业区域r的端部接近至设定距离的位置确定为通知位置,或者,可以基于作业区域信息(特别是作业区域r的端部的位置信息)而将相对于作业区域r的端部接近至设定距离的位置确定为通知位置并以此代替结束位置p2b。虽然通知位置确定部59可以将平行路径p2的结束位置p2b及相对于作业区域r的端部接近至设定距离的位置确定为通知位置,不过,用户等可以选择将任一位置确定为通知位置、或者将这两个位置均确定为通知位置。
97.像这样,由于通知位置确定部59确定了通知位置,所以,在使拖拉机1自动行驶的自动行驶控制中,当端部通知控制部186基于采用卫星定位系统并利用定位单元21获取的拖拉机1的定位信息而判定为拖拉机1的当前位置到达通知位置(例如结束位置p2b)时,使通知装置26工作进行端部通知,将接近于作业区域r的端部等的接近状态通知给用户等。端
部通知中,例如可以通过声音、警报灯的点亮、警报蜂鸣器的工作等由通知装置26进行的各种通知来通知处于接近状态。另外,端部通知中,不仅可以使拖拉机1的通知装置26工作,还可以使接近状态显示于便携式通信终端3的显示部51等在便携式通信终端3中也通知接近状态。
98.随着端部通知控制部186进行端部通知,车载电子控制单元18也能够使拖拉机1停止行驶。像这样,通过使拖拉机1停止行驶,能够适当防止拖拉机1脱离到作业区域r外。
99.如图8所示,基准点设定部56构成为:除了设定地点a~地点c以外,还能够设定地点d(相当于第四基准点)。地点d用于生成与第一基准线p1不同的第二基准线p4,基准点设定部56与地点a~地点c同样地,基于基准点设定用操作部57的操作或动作状态监测部27的监测信息,利用定位单元21获取拖拉机1的位置信息,将该获取的位置信息作为地点d的位置信息,在作业区域r设定地点d。
100.基于动作状态监测部27的监测信息设定地点d的情况下,通过在地点d结束自动行驶,使得拖拉机1的行驶方向变更为与平行路径p2不同的方向,拖拉机1的自动行驶结束而停止行驶,因此,可以基于动作状态监测部27的监测信息,确定拖拉机1的行驶方向被变更为与平行路径p2不同的方向或拖拉机1的自动行驶结束而停止了行驶,由此能够确定自动行驶结束时刻。
101.当利用基准点设定部56设定地点d时,行驶路径生成部54生成将地点d和地点a或地点b连结的第二基准线p4。在将地点d和地点a连结的直线及将地点d和地点b连结的直线中,将相对于第一基准线p1交叉的角度接近90度的一侧设为第二基准线p4。图8所示的作业区域中,例如将地点d和地点a连结的直线与第一基准线p1正交,因此,生成将地点d和地点a连结的第二基准线p4。第二基准线p4为将地点d和地点a或地点b连结的线即可,不限定于与第一基准线p1正交的线,也可以为与第一基准线p1倾斜交叉的线。
102.如图9所示,行驶路径生成部54随着规定条件的成立而选择第一基准线p1及第二基准线p4中的任一基准线,作为目标行驶路径p,生成除了包含第一基准线p1、多个平行路径p2、多个连结路径p3以外、还包含与根据拖拉机1的当前位置而选择的基准线p1、p4平行的追加路径p5、p6的路径。例如,可以在生成有第一基准线p1及多个平行路径p2的作业区域r的中央区域周围的周围区域中生成追加路径p5、p6,以便使拖拉机1自动行驶。
103.图9所示的作业区域中,关于追加路径p5、p6,图示了(1)~(8)的作业顺序,因此,沿着作业顺序加以说明。
104.(1)在到达地点d后,拖拉机1进行手动驾驶,移动到图9中下侧,若拖拉机1的行驶方向上的方位和第二基准线p4的延伸设置方向上的方位在规定范围内,则规定的条件成立。由此,行驶路径生成部54选择第二基准线p4,生成与第二基准线p4平行的作业顺序(1)的追加路径p6,车载电子控制单元18使拖拉机1沿着作业顺序(1)的追加路径p6进行自动行驶。
105.此处,对追加路径p6的生成方法加以说明。顺便说一下、追加路径p5、p6的生成方法相同,因此,(2)~(8)中,省略说明。行驶路径生成部54如下生成追加路径p6,即,以规定条件成立时的拖拉机1的位置为基准来设定追加路径p6的起始位置,追加路径p6的结束位置p6a与所选择的平行的第二基准线p4的端部位置(地点a或地点d)相同或大致相同。
106.例如,图9中,当拖拉机1在左右方向上移动到与地点d相同的位置时,拖拉机1的行
驶方向上的方位和第二基准线p4的延伸设置方向上的方位在规定范围内。由此,以此时的拖拉机1的位置为基准,设定追加路径p6的起始位置,追加路径p6的结束位置p6a设定为与拖拉机1所在侧相反一侧的第二基准线p4的端部位置(地点a)。据此,生成与第二基准线p4相同长度的追加路径p6。
107.与此相对,图9中,当拖拉机1移动到比地点d更靠右侧时,若拖拉机1的行驶方向上的方位和第二基准线p4的延伸设置方向上的方位在规定范围内,则以此时的拖拉机1的位置为基准,设定追加路径p6的起始位置。据此,生成长度比第二基准线p4的长度长的追加路径p6。反之,图9中,当拖拉机1移动到比地点d更靠左侧时,若拖拉机1的行驶方向上的方位和第二基准线p4的延伸设置方向上的方位在规定范围内,则以此时的拖拉机1的位置为基准,设定追加路径p6的起始位置,因此,生成长度比第二基准线p4的长度短的追加路径p6。
108.(2)在作业顺序(1)中的追加路径p6的自动行驶结束后,拖拉机1进行手动驾驶,移动到图9中的下侧,若拖拉机1的行驶方向上的方位和第二基准线p4的延伸设置方向上的方位在规定范围内,则规定的条件成立。由此,行驶路径生成部54选择第二基准线p4,生成与第二基准线p4平行的作业顺序(2)的追加路径p6,车载电子控制单元18使拖拉机1沿着作业顺序(2)的追加路径p6进行自动行驶。
109.(3)在作业顺序(2)中的追加路径p6的自动行驶结束后,拖拉机1进行手动驾驶,移动到图9中的上侧,若拖拉机1的行驶方向上的方位和第一基准线p1的延伸设置方向上的方位在规定范围内,则规定的条件成立。由此,行驶路径生成部54选择第一基准线p1,生成与第一基准线p1平行的作业顺序(3)的追加路径p5。据此,车载电子控制单元18使拖拉机1沿着作业顺序(3)的追加路径p5进行自动行驶。
110.关于(4)~(8),仅仅选择的基准线不同,进行与(2)及(3)等同样的动作,因此,省略说明。
111.基于图10的流程图,对以图9所示的追加路径p5、p6进行自动行驶时的动作流程进行说明。顺便说一下,如图7的流程图所示,追加路径p5、p6的自动行驶紧接着以多个平行路径p2、多个连结路径p3到达地点d为止的自动行驶而进行。
112.如图9所示,当拖拉机1到达地点d而结束作业装置12的作业时,利用基准点设定部56进行地点d的登记(设定)(步骤#11)。行驶路径生成部54基于地点d的登记信息(位置信息),生成第二基准线p4(步骤#12)。
113.在到达地点d后,通过用户等的手动操作,对拖拉机1进行手动驾驶,不过,该手动驾驶中,行驶路径生成部54判定规定的条件是否成立(步骤#13、步骤#14)。规定的条件设定为:拖拉机1的行驶方向上的方位和基准线的延伸设置方向上的方位(第一基准线p1的延伸设置方向上的方位或第二基准线p4的延伸设置方向上的方位)在规定范围内的条件。顺便说一下,拖拉机1的行驶方向上的方位可以根据定位单元21的测定信息获取,基准线的延伸设置方向上的方位可以根据第一基准线p1及第二基准线p4的位置信息获取。
114.若规定的条件成立,则行驶路径生成部54根据规定的条件在第一基准线p1和第二基准线p4中的哪个基准线之间成立,选择第一基准线p1和第二基准线p4中的任一基准线(步骤#15)。行驶路径生成部54生成与根据拖拉机1的当前位置选择的基准线平行的追加路径p5、p6(步骤#16)。顺便说一下,规定的条件在第一基准线p1和第二基准线p4这两者中均成立的情况下,选择拖拉机1的行驶方向上的方位与基准线的延伸设置方向上的方位之间
的偏差较小的基准线。
115.当行驶路径生成部54生成追加路径p5、p6时,终端电子控制单元52将与追加路径p5、p6相关的路径信息从便携式通信终端3向拖拉机1移送,由此车载电子控制单元18获取路径信息。据此,当满足各种自动行驶开始条件,用户利用便携式通信终端3对显示部51进行操作,指示开始自动行驶时,车载电子控制单元18基于获取的路径信息,边利用定位单元21获取自己的当前位置(拖拉机1的当前位置)边进行使拖拉机1沿着追加路径p5、p6进行自动行驶的自动行驶控制(步骤#17)。
116.此时的自动行驶控制中,车载电子控制单元18以开始作业装置12的作业并在追加路径p5、p6的结束位置p5a、p6a结束作业装置12的作业的方式,使拖拉机1沿着追加路径p5、p6进行自动直线行驶。在开始作业装置12的作业时,对拖拉机1进行手动驾驶,因此,还可以通过用户等的手动操作开始作业装置12的作业。
117.像这样,使拖拉机1手动驾驶直至规定的条件成立为止,当规定的条件成立而生成追加路径p5、p6时,使拖拉机1沿着该追加路径p5、p6进行自动行驶(步骤#13~步骤#17),反复进行这些动作直至作业区域r中的作业结束(步骤#18的no的情形)为止。当拖拉机1移动到作业区域r外等作业结束条件成立时,车载电子控制单元18判定为作业区域r中的作业结束。
118.在追加路径p5、p6进行自动行驶的情形与上述的情形同样地,也将拖拉机1接近于作业区域r的端部等的接近状态通知给用户等,以便防止拖拉机1脱离到作业区域r外。如图9所示,通知位置确定部59基于追加路径p5、p6的位置信息,将追加路径p5、p6中的结束位置p5a、p6a确定为通知位置。例如,在生成了追加路径p5的情况下,通知位置确定部59在追加路径p5上将处于与地点a或地点b相同位置的结束位置p5a确定为通知位置,在生成了追加路径p6的情况下,通知位置确定部59在追加路径p6上将处于与地点a或地点d相同位置的结束位置p6a确定为通知位置。通知位置确定部59除了确定追加路径p5、p6中的结束位置p5a、p6a,还可以基于作业区域信息(特别是作业区域r的端部的位置信息)而将相对于作业区域r的端部接近至设定距离的位置确定为通知位置,或者,可以基于作业区域信息(特别是作业区域r的端部的位置信息)而将相对于作业区域r的端部接近至设定距离的位置确定为通知位置并以此代替追加路径p5、p6中的结束位置p5a、p6a。
119.由于通知位置确定部59确定了通知位置,所以,在使拖拉机1沿着追加路径p5、p6自动行驶的自动行驶控制中,当端部通知控制部186判定为拖拉机1的当前位置到达了通知位置(例如结束位置p5a、p6a)时,使通知装置26工作进行端部通知,将接近于作业区域r的端部等的接近状态通知给用户等。在将追加路径p5、p6中的结束位置p5a、p6a设为通知位置的情况下,通过通知装置26的工作,用户等能够识别追加路径p5、p6中的自动行驶结束,因此,能够顺利地从自动行驶切换为手动驾驶。此外,在将相对于作业区域r的端部接近至设定距离的位置设为通知位置的情况下,即便拖拉机1到达追加路径p5、p6的结束位置p5a、p6a,车载电子控制单元18也不会将拖拉机1的自动行驶结束,而是可以持续拖拉机1的自动行驶直至拖拉机1到达通知位置为止。
120.如图9所示,通过登记地点a~地点c,能够通过拖拉机1的自动行驶对作业区域r的中央区域进行作业,除此以外,通过进一步登记地点d,还能够通过拖拉机1的自动行驶对中央区域周围的周围区域进行作业,从而能够效率良好地进行作业区域r的作业。图9中,关于
作业区域r的四个角部区域,例如可以紧接着追加路径p5、p6中的自动行驶,通过由用户等的手动操作进行的拖拉机1的手动驾驶而进行作业。
121.〔第二实施方式〕
122.该第二实施方式示出了第一实施方式的另一实施方式,以与第一实施方式不同的构成为中心进行说明,因对与第一实施方式同样的构成标记相同的符号等,省略说明。
123.该第二实施方式与第一实施方式不同,不具备便携式通信终端3,如图11所示,行驶路径生成部54、基准点设定部56、通知位置确定部59等配备于车载电子控制单元18。如图11及图13所示,作为基准点设定用操作部57,具备可由用户等自由携带的远距离控制器200。远距离控制器200构成为:在与拖拉机1的车载电子控制单元18之间,借助通信模块25、206等而自由传达各种信息。如图13所示,远距离控制器200具备:用于登记地点a的地点a用的操作部201、用于登记地点b的地点b用的操作部202、用于登记地点c的地点c用的操作部203、以及用于指令自动行驶的圆形的auto用的操作部204。在圆形的auto用的操作部204的周围具备:具有多个led等发光部的环状的显示部205,显示部205构成为:通过使多个发光部的点亮状态不同,向多个显示方式自由切换。
124.对第二实施方式中的利用行驶路径生成部54生成目标行驶路径p的方法进行说明。
125.与第一实施方式同样地,用户等进行驾驶操作,使拖拉机1在作业区域r内行驶并实际上进行作业,由此,行驶路径生成部54生成目标行驶路径p。
126.如图3~图5所示,在作业区域r中,通过用户等的手动驾驶使拖拉机1行驶,由此,基准点设定部56基于远距离控制器200的操作(参照图13),分别登记地点a、地点b、地点c。例如,如果对远距离控制器200的地点a用的操作部201进行操作,则基准点设定部56获取其操作时刻的定位单元21的位置信息(拖拉机1的位置信息),在作业区域r设定地点a(根据纬度、经度确定的地点)。另外,关于地点b、地点c,同样地,基准点设定部56也基于远距离控制器200的地点b用的操作部202的操作及远距离控制器200的地点c用的操作部203的操作,设定地点b及地点c(根据纬度、经度确定的地点)。顺便说一下,基准点设定部56与第一实施方式同样地,也能够基于动作状态监测部27的监测信息,利用定位单元21获取拖拉机1的位置信息,在作业区域r自动地分别设定地点a、地点b及地点c。
127.当基准点设定部56基于远距离控制器200的操作或动作状态监测部27的监测信息,在作业区域r设定地点a~地点c时,行驶路径生成部54基于地点a~地点c而生成目标行驶路径p。
128.第一实施方式中,当行驶路径生成部54生成目标行驶路径p时,利用作业区域信息获取部58获取与地点a~地点c所属的作业区域r相关的作业区域信息,不过,第二实施方式中,不具备作业区域信息获取部58,在没有获取作业区域信息的状态下,如图12所示,行驶路径生成部54生成目标行驶路径p。
129.如图12所示,行驶路径生成部54中,作为目标行驶路径p,生成包含与基于地点a及地点b的第一基准线p1平行的多个平行路径p2在内的路径,并基于地点b与地点c之间的距离来设定第一基准线p1与平行路径p2之间及平行路径p2彼此之间的间隔。行驶路径生成部54生成将地点a和地点b连结的直线作为第一基准线p1。行驶路径生成部54在沿着将地点b和地点c连结的直线的方向上以相当于地点b与地点c之间的距离隔开间隔地平行并列设置
多个长度与第一基准线p1相同或大致相同的路径,由此生成设定条数的平行路径p2。平行路径p2成为:使拖拉机1边自动行驶边进行规定作业的路径。
130.第二实施方式中,未获取作业区域信息,因此,无论作业区域r的位置、形状如何,行驶路径生成部54都生成设定条数(例如图12中为10条)的平行路径p2。并且,行驶路径生成部54除了生成平行路径p2以外,还生成连结路径p3。行驶路径生成部54生成将相邻的平行路径p2彼此连结的多个连结路径p3。连结路径p3成为:不进行作业而用于使拖拉机1的行驶方向转换的路径。
131.像这样,行驶路径生成部54生成多个平行路径p2和多个连结路径p3,由此,拖拉机1能够在多个平行路径p2往复行驶,同时生成进行规定作业的目标行驶路径p。据此,即便用户等不进行输入作业装置12的种类、宽度等各种信息的输入作业,只要登记地点a~地点c,也能够生成目标行驶路径p。并且,地点a~地点c各自可以设为与用户等通过手动驾驶进行的实际作业相对应的地点,能够生成平行路径p2的路径长度、相邻的平行路径p2彼此的间隔等用户等意图实现的所期望的目标行驶路径p。
132.在进行自动行驶的情况下,在满足了各种自动行驶开始条件的状态下,对远距离控制器200的auto用的操作部204进行操作,由此,车载电子控制单元18进行使拖拉机1沿着目标行驶路径p进行自动行驶的自动行驶控制。此时的自动行驶控制中,车载电子控制单元18以在平行路径p2的起始位置p2a开始作业装置12的作业、并在平行路径p2的结束位置p2b结束作业装置12的作业而使拖拉机1停止行驶的方式,使拖拉机1沿着多个平行路径p2分别进行自动直线行驶。拖拉机1在平行路径p2的结束位置p2b停止行驶后,如果对远距离控制器200的auto用的操作部204进行操作,则车载电子控制单元18以不进行作业装置12的作业的方式,使拖拉机1沿着多个连结路径p3分别进行自动转弯行驶。
133.像这样,自动行驶控制中,由于拖拉机1在平行路径p2的结束位置p2b停止行驶,所以,如果不再次对远距离控制器200的auto用的操作部204进行操作,则不进行连结路径p3中的自动行驶。据此,在接近作业区域r的端部而有可能离开作业区域r侧的情况下,用户等不进行远距离控制器200的auto用的操作部204的操作,由此能够防止脱离到作业区域r外。由此,如图12所示,即便在作业区域r外也生成目标行驶路径p,拖拉机1也不会脱离到作业区域r外,而能够进行自动行驶。
134.如上所述,车载电子控制单元18虽然在连结路径p3上也使拖拉机1自动行驶,不过,还可以在连结路径p3上通过用户等的手动操作使拖拉机1进行手动驾驶。这种情况下,在平行路径p2的结束位置p2b从自动驾驶切换为手动驾驶,当拖拉机1的行驶方向上的方位和平行路径p2的延伸设置方向上的方位处于规定范围内等各种自动行驶开始条件成立而指示开始自动行驶时,从手动驾驶切换为自动驾驶,拖拉机1沿着平行路径p2进行自动行驶。在进行手动驾驶的情况下,通过使拖拉机1的当前位置和平行路径p重叠显示于便携式通信终端3的显示部51或拖拉机1的显示部,能够将手动驾驶的拖拉机1朝向平行路径p2引导。
135.第二实施方式中,在进行自动行驶的情况下,与第一实施方式同样地,将拖拉机1接近于作业区域r的端部等的接近状态通知给用户等,以便防止拖拉机1脱离到作业区域r外。如图12所示,通知位置确定部59基于地点a及地点b的位置信息,将平行路径p2的结束位置p2b确定为通知位置。由于通知位置确定部59确定了通知位置,所以,在使拖拉机1沿着平
行路径p2自动行驶的自动行驶控制中,当端部通知控制部186判定为拖拉机1的当前位置到达了通知位置(例如结束位置p2b)时,使通知装置26工作进行端部通知,将接近于作业区域r的端部等的接近状态通知给用户等。这种情况下,还可以使处于接近状态显示于远距离控制器200的显示部205。
136.〔第三实施方式〕
137.第三实施方式示出了第一实施方式中作业区域r的形状不同的情形,以作业区域r的形状为中心进行说明,因对与第一实施方式同样的构成标记相同的符号等,省略说明。
138.第一实施方式中,如图3等所示,示出了作业区域r为矩形的情形,不过,该第三实施方式中,例如,如图14所示,作业区域r的形状呈现:图中左侧设为宽度较窄的一边且图中右侧设为宽度较宽的一边的横向梯形。这种情况下,能够在比地点b更接近作业区域r的端部r1(图中的上端部)一侧登记地点c。即便像这样登记地点c,由于作业区域r的端部r1呈现越趋向右侧越位于上侧的倾斜状,所以,也能够将作业区域r的端部r1与地点b对置的距离、和作业区域r的端部r1与地点c对置的距离设为相同的距离。
139.行驶路径生成部54根据利用作业区域信息获取部58获取的作业区域信息能够掌握作业区域r的形状,在掌握了作业区域r的形状的基础上,生成目标行驶路径p。此时,在生成与第一基准线p1平行的多个平行路径p2时,以成为比在离开第一基准线p1的位置处生成的平行路径p2长设定长度2k的平行路径p2的方式,生成多个平行路径p2。平行路径p2的设定长度2k可以基于例如沿着第一基准线p1的方向上的地点b与地点c之间的距离k来设定,从而可以将沿着第一基准线p1的方向上的地点b与地点c之间的距离k的2倍设为设定长度(2k)。例如,与第一基准线p1相邻的第一条平行路径p2可以设为比第一基准线p1长设定长度2k的路径,下一个第二条平行路径p2可以设为比第一基准线p1长2倍的设定长度(4k)的路径。通过像这样生成平行路径p2,使得将平行路径p2的一端部(图中的上端部)彼此连结的直线与倾斜状的作业区域r的端部r1平行,并且,使得将平行路径p2的另一端部(图中的下端部)彼此连结的直线与倾斜状的作业区域r的端部r2平行。据此,能够生成与作业区域r的形状相对应的平行路径p2。
140.另外,如图15所示,作业区域r的形状也有时成为具有幅宽区域r3和一对幅窄区域r4、r5的横向u字状。这种情况下,当行驶路径生成部54生成目标行驶路径p时,预生成作为候补的多种目标行驶路径p,用户等可以选择生成哪个目标行驶路径p。例如,如图15所示,将第一候补设为以实线表示的目标行驶路径p,将第二候补设为以实线及虚线表示的目标行驶路径p,将第三候补设为以实线及单点划线表示的目标行驶路径p,如图16所示,可以将第四候补设为以实线表示的目标行驶路径p。对于第一候补,如图15的实线所示,仅在作业区域r中的幅宽区域r3预生成目标行驶路径p。对于第二候补,如图15的实线及虚线所示,仅在作业区域r中的幅宽区域r3及一侧(上侧)的幅窄区域r4预生成目标行驶路径p。针对幅窄区域r4,生成了长度比幅宽区域r3的平行路径p2的长度短且长度与幅窄区域r4的宽度(图中的上下宽度)相对应的平行路径p7。对于第三候补,如图15的实线及单点划线所示,仅在作业区域r中的幅宽区域r3及另一侧(下侧)的幅窄区域r5预生成目标行驶路径p。针对幅窄区域r5,生成了长度比幅宽区域r3的平行路径p2的长度短且长度与幅窄区域r5的宽度(图中的上下宽度)相对应的平行路径p8。对于第四候补,如图16的实线所示,在幅宽区域r3及一对幅窄区域r4、r5的作业区域r整体预生成目标行驶路径p。在该第四候补中,生成将上侧
的幅窄区域r4和下侧的幅窄区域r5连结的连结路径p9。
141.用户等从多个候补中选择1个目标行驶路径p的情况下,例如可以使其以能够识别第一~第四候补的目标行驶路径p的状态显示于便携式通信终端3的显示部51,通过用户等对显示部51进行操作,能够选择1个目标行驶路径p。当用户等选择1个目标行驶路径p时,行驶路径生成部54生成其选择的目标行驶路径p作为进行自动行驶的路径。
142.〔其他实施方式〕
143.对本发明的其他实施方式进行说明。
144.应予说明,以下说明的各实施方式的构成不限于各自单独应用,也可以与其他实施方式的构成组合应用。
145.(1)作业车辆的构成可以进行各种变更。
146.例如,作业车辆可以构成为具备发动机9和行驶用的电动马达的混合动力规格,另外,也可以构成为具备行驶用的电动马达来代替发动机9的电动规格。
147.例如,作业车辆可以构成为具备左右履带代替左右后轮6来作为行驶部的半履带规格。
148.例如,作业车辆可以构成为左右后轮6作为转向操纵轮发挥作用的后轮转向规格。
149.(2)上述第一实施方式中,行驶路径生成部54、基准点设定部56、作业区域信息获取部58、通知位置确定部59等配备于便携式通信终端3,不过,例如也可以将行驶路径生成部54、基准点设定部56、作业区域信息获取部58、通知位置确定部59等配备于拖拉机1或者外部的管理装置,配置部位可以进行适当变更。
150.产业上的可利用性
151.本发明能够应用于生成供作业车辆自动行驶的目标行驶路径的各种路径生成系统。
152.附图标记说明
[0153]1ꢀꢀꢀꢀ
拖拉机(作业车辆)
[0154]
54
ꢀꢀꢀ
行驶路径生成部
[0155]
56
ꢀꢀꢀ
基准点设定部
[0156]
58
ꢀꢀꢀ
作业区域信息获取部
[0157]
59
ꢀꢀꢀ
通知位置确定部
[0158]
186
ꢀꢀ
端部通知控制部
[0159]
p
ꢀꢀꢀꢀ
目标行驶路径
[0160]
p1
ꢀꢀꢀ
第一基准线
[0161]
p2
ꢀꢀꢀ
平行路径
[0162]
p4
ꢀꢀꢀ
第二基准线
[0163]
p5
ꢀꢀꢀ
追加路径
[0164]
p6
ꢀꢀꢀ
追加路径
[0165]
r
ꢀꢀꢀꢀ
作业区域
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

