1.本发明总体而言涉及航天控制系统仿真及测试技术领域,具体而言涉及一种卫星模拟在轨工况闭环测试系统。
背景技术:
2.为保证安全性和可靠性,卫星在集成后需要进行多项大型试验,包括热真空、力学、emc以及老练试验等。在试验时,尽可能利用地面的试验设备来模拟卫星飞行时的真实环境。在试验前后或在试验过程中,通过加电测试的方式来检查卫星的功能和性能。在进行加电测试、尤其是热、老练这种长时间加电测试时,期望以卫星真实的在轨运行状态对其寿命周期内各阶段对应的全部功能、性能进行测试,这样可以更充分和全面的检查卫星状态,更容易暴露设计缺陷以便在地面时就及时加以解决。
3.对于控制系统而言,在轨运行为闭环控制方式,而地面卫星集成后的试验通常是开环方式,因为现有测试系统会难以避免地引入外部激励。尽管通过设置单机的工作状态来尽可能模拟在轨工况,但是单机开环方式无法完全模拟闭环状态,同时系统软件也无法得到充分验证,这会导致部分设计缺陷无法在地面测试时及时发现,从而对后续在轨运行造成一定风险。
技术实现要素:
4.本发明的任务是提供一种卫星模拟在轨工况闭环测试系统,通过该系统,可以精确地模拟卫星的敏感器和执行器,从而保证了测试的闭环性;此外该系统简单且低成本,无需对现有测试系统进行较大改造,因此也适于用于现有测试系统。
5.在本发明的第一方面,该任务通过一种卫星模拟在轨工况闭环测试系统来解决,该系统包括:
6.系统用于对现有测试系统进行改造;
7.系统适用于卫星集成后的全部大型试验或测试,以进行全任务阶段、真实工作状态下的系统功能、性能的全面考核;
8.采用小型动态模拟器作为敏感器的激励源,在卫星集成状态下直接布置在卫星敏感器表面,降低现有测试系统的改造成本;
9.利用卫星遥测参数作为输入进行执行器精确建模,以使执行器进入测试闭环;
10.所述卫星遥测参数包括执行器控制指令以及反作用轮转速;
11.反作用轮以转速建模的方式取代指令建模,以使单机以真实工作状态进行闭环测试。
12.在本发明的另一优选方案中规定,所述卫星模拟在轨工况闭环测试系统包括:
13.动态模拟器,其被配置为从姿态和轨道动力学模型接收卫星的轨道和姿态数据以便给卫星敏感器提供动态激励源;
14.姿态和轨道动力学模型,其被配置为模拟卫星的真实飞行状态,其中所述姿态和
轨道动力学模型根据从执行器模型接收的推力数据和输出力矩数据生成卫星的轨道和姿态数据;以及
15.执行器模型,其被配置为对执行器进行建模,其中所述执行器模型根据卫星的遥测状态生成推力数据和输出力矩数据,其中所述遥测状态包括卫星控制指令和反作用轮转速,其中所述执行器模型包括:
16.推力器模型,其被配置为对推力器进行建模,其中所述建模为指数模型并且根据卫星控制指令模拟推力的上升沿和下降沿以生成推力数据;以及
17.反作用轮模型,其被配置为对反作用轮进行建模,其中所述反作用轮模型根据反作用轮转速计算反作用轮的输出力矩。
18.在本发明的一个优选方案中规定,所述推力器模型通过下列公式来对推力器进行建模:
[0019][0020]
其中t
n
为指令喷气时间;t
sr
,t
sd
为电磁阀的开启时延和关闭时延;t
fr
,t
fd
为推力的上升时间常数和下降时间常数,f
i
为推力幅值。
[0021]
通过该优选方案,可以简单且精确地模拟推力器的推力的上升沿和下降沿,从而保证测试的精确性。
[0022]
在本发明的另一优选方案中规定,所述反作用轮模型通过下列公式来对反作用轮进行建模:
[0023]
t
c
=t
m
t
d
[0024]
其中,t
m
为输出力矩,z方向为反作用轮的转动方向,t
mx
=t
my
=0,t
mz
=i
w
·
(ω
t
‑
ω
t
‑1),i
w
为反作用轮转动惯量,ω为反作用轮转速,并且t
d
为扰动力矩,其中
[0025][0026]
其中u
d
为动不平衡量,α0为初始相位。
[0027]
通过该优选方案,可以以转速建模方式而不是指令建模方式来简单且精确地模拟反作用轮,从而根据卫星控制指令中的转速差生成输出力矩。
[0028]
在本发明的又一优选方案中规定,动态模拟器直接布置在卫星敏感器上。通过该优选方案,可以将动态模拟器直接安装在集成状态下的卫星上,从而减少测试系统的改造成本。
[0029]
在本发明的另一优选方案中规定,该系统还包括时间同步设备,其被配置为以地面动力学时间为基准进行时间校准以实现星地时间同步。通过该优选方案,可以自主地实现星地时间同步,保证闭环测试过程的正确性。
[0030]
在本发明的一个扩展方案中规定,所述动态模拟器包括下列各项中的一个或多个:动态星图模拟器、小型太阳模拟器、以及小型红外地球模拟器。在此应当指出,在本发明的教导下,其它光学或红外模拟器也是可设想的。
[0031]
在本发明的一个扩展方案中规定,依据卫星的敏感器的配置情况,选择相应的动态模拟器,
[0032]
如果卫星配置有卫星敏感器,则选择动态星图模拟器作为激励源,将动态模拟器的光学头部安装于卫星敏感器的遮光罩处,使得模拟器焦平面位置与敏感器镜头的入瞳位置重合;
[0033]
如果卫星配置有地球敏感器,则选择小型地球模拟器作为激励源,将模拟器的红外头部安装于地球敏感器的镜头位置,使得地球敏感器的红外探测器能够直接敏感模拟器产生的红外图像;
[0034]
如果卫星配置有太阳敏感器,则选择小型太阳模拟器,利用光源强弱或方位变化,模拟太阳方位变化。
[0035]
在本发明的又一优选方案中规定,建立精确的卫星姿态动力学模型的方式包括:依据卫星具体特点,选择加入帆板挠性或液体晃动附件;进行摄动力建模,包括光压、非球形或气动,得到精确的轨道动力学模型。
[0036]
在本发明的又一优选方案中规定,还包括:
[0037]
卫星以单独卫星敏感器定姿作为主定姿模式,配置推力器、反作用轮和磁力矩器以完成卫星姿态和轨道控制;
[0038]
卫星每秒向地面综测系统下发遥测状态数据,综测系统将相应数据重新组包后通过网络转发给卫星模拟在轨工况闭环测试系统;
[0039]
卫星模拟在轨工况闭环测试系统以5ms周期进行转发包查询,接收到转发数据后,5ms内完成执行器模型的计算、动力学模型的计算以及模拟器输入的计算;
[0040]
敏感器模型用于模拟模拟器,根据模拟器输入,从卫星姿态和轨道动力学模型接收相应信号以生成敏感器模拟信号;
[0041]
之后以100ms周期驱动模拟器产生模拟器激励信号;
[0042]
卫星敏感器采集模拟器信号,1s内完成控制器计算并下发遥测。
[0043]
在本发明的又一优选方案中规定,其中所述卫星集成后的试验或测试包括热试验和老练试验,以进行全任务阶段、真实工作状态下的系统功能、性能的全面考核。
[0044]
采用卫星模拟在轨工况闭环测试系统进行卫星热真空试验,包括:
[0045]
在高低温各工况,开展全部任务模式的闭环测试;
[0046]
全部任务模式包括对日定向模式、对地定向模式、正常工作模式以及轨道控制模式;
[0047]
试验过程中,单机和软件均工作在真实在轨状态。
[0048]
本发明至少具有下列有益效果:第一,采用小型动态模拟器作为敏感器的激励源,由于模拟器探头部分具有轻便易于安装的特点,因此可在卫星集成状态下直接安装于敏感器表面,从而降低了将本发明应用于现有卫星测试系统的成本;第二,利用执行器控制指令以及反作用轮转速等卫星遥测参数作为输入进行执行器精确建模,解决了执行器进入测试闭环的问题,特别是反作用轮以转速建模的方式取代指令建模,确保单机以真实工作状态进行闭环测试;第三,以动力学时间为基准,自主进行星地时间同步,确保闭环测试过程的正确性。
附图说明
[0049]
下面结合附图参考具体实施例来进一步阐述本发明。
[0050]
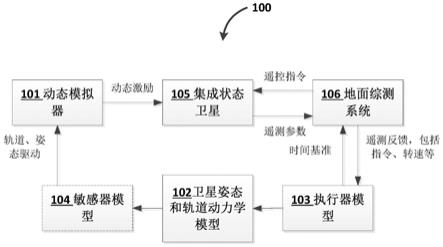
图1示出了根据本发明的卫星模拟在轨工况闭环测试系统的框图;
[0051]
图2示出了推力器模型的示意性输出曲线;
[0052]
图3示出了将本发明的方案应用于高轨卫星时的对日模式姿态控制曲线图;
[0053]
图4示出了将本发明的方案应用于高轨卫星时的卫星对地模式姿态控制曲线图;
[0054]
图5示出了将本发明的方案应用于高轨卫星时的卫星正常工作模式姿态控制曲线图;
[0055]
图6示出了将本发明的方案应用于高轨卫星时的卫星正常工作模式反作用轮转速曲线图;以及
[0056]
图7示出了将本发明的方案应用于高轨卫星时的卫星轨控模式姿态控制曲线图。
具体实施方式
[0057]
应当指出,各附图中的各组件可能为了图解说明而被夸大地示出,而不一定是比例正确的。在各附图中,给相同或功能相同的组件配备了相同的附图标记。
[0058]
在本发明中,除非特别指出,“布置在
…
上”、“布置在
…
上方”以及“布置在
…
之上”并未排除二者之间存在中间物的情况。
[0059]
在本发明中,各实施例仅仅旨在说明本发明的方案,而不应被理解为限制性的。
[0060]
在本发明中,除非特别指出,量词“一个”、“一”并未排除多个元素的场景。
[0061]
在此还应当指出,在本发明的实施例中,为清楚、简单起见,可能示出了仅仅一部分部件或组件,但是本领域的普通技术人员能够理解,在本发明的教导下,可根据具体场景需要添加所需的部件或组件。
[0062]
另外,本发明的各方法的步骤的编号并未限定所述方法步骤的执行顺序。除非特别指出,各方法步骤可以以不同顺序执行。
[0063]
在本发明中,各种模型是指对相应目标进行模拟的数学模型,其可以通过软件、硬件和/或固件来实现。
[0064]
本发明致力于解决在卫星集成后进行控制系统闭环测试的如下难点:首先,集成状态下敏感器动态激励源的添加;其次,执行器工作状态的采集,并利用采集的状态得到其输出的力或力矩;最后,地面系统之间的时间同步。
[0065]
为解决上述难点,本发明提供了一种卫星模拟在轨工况闭环测试系统,系统用于对现有测试系统进行改造;系统适用于卫星集成后的全部大型试验或测试,以进行全任务阶段、真实工作状态下的系统功能、性能的全面考核;采用小型动态模拟器作为敏感器的激励源,在卫星集成状态下直接布置在卫星敏感器表面,降低现有测试系统的改造成本;利用卫星遥测参数作为输入进行执行器精确建模,以使执行器进入测试闭环;所述卫星遥测参数包括执行器控制指令以及反作用轮转速;反作用轮以转速建模的方式取代指令建模,以使单机以真实工作状态进行闭环测试。
[0066]
下面结合具体实施例进一步阐述本发明。
[0067]
图1示出了根据本发明的卫星闭环测试系统100的框图。
[0068]
如图1所示,系统100包括动态模拟器101。动态模拟器101被配置为从姿态和轨道动力学模型102(可选地从敏感器模型104)接收卫星的轨道和姿态数据以便给集成状态卫星105的卫星敏感器提供动态激励源。
[0069]
本发明中,可以依据卫星的敏感器的配置情况,选择相应的动态模拟器。如果卫星配置有卫星敏感器,则可以选择动态星图模拟器作为激励源。例如可以将动态模拟器101的光学头部安装于卫星敏感器的遮光罩处,使得模拟器焦平面位置与敏感器镜头的入瞳位置重合;如果卫星配置有地球敏感器,则可以选择小型地球模拟器作为激励源。例如可以将模拟器的红外头部安装于地球敏感器的镜头位置,使得地球敏感器的红外探测器能够直接敏感模拟器产生的红外图像。如果卫星配置有太阳敏感器,则可以选择小型太阳模拟器,利用光源强弱或方位变化,模拟太阳方位变化。
[0070]
系统100还包括姿态和轨道动力学模型102。姿态和轨道动力学模型102被配置为模拟卫星的真实飞行状态。姿态和轨道动力学模型102根据从执行器模型103接收的推力数据和输出力矩数据生成卫星的轨道和姿态数据。建立精确的卫星姿态动力学模型102的方式例如是:依据卫星具体特点,选择加入帆板挠性或液体晃动附件;进行摄动力建模,包括光压、非球形、气动等,得到精确的轨道动力学模型。
[0071]
系统100还包括执行器模型103。执行器模型103被配置为对执行器进行建模,其中执行器模型103根据卫星的遥测状态生成推力数据和输出力矩数据。遥测状态可以是接受自地面综测系统106,其包括卫星控制指令和反作用轮转速。遥测状态还可以包含其它卫星数据。
[0072]
执行器模型103包括:
[0073]
·
推力器模型,其被配置为对推力器进行建模,其中所述建模为指数模型并且根据卫星控制指令模拟推力的上升沿和下降沿以生成推力数据。推力器的指数模型的一个示例为:
[0074][0075]
其中t
n
为指令喷气时间;t
sr
,t
sd
为电磁阀的开启时延和关闭时延;t
fr
,t
fd
为推力的上升时间常数和下降时间常数,f
i
为推力幅值。图2示出了模型与实际推力之间的对比关系。从图2中可以得知,通过该指数模型,可以精确地模拟推力的上升沿和下降沿,从而简单且精确地模拟推力。
[0076]
·
反作用轮模型,其被配置为对反作用轮进行建模,其中所述反作用轮模型根据反作用轮转速计算反作用轮的输出力矩。反作用轮的模型的一个示例是:
[0077]
通过下式来表征反作用轮的输出力矩:
[0078]
t
c
=t
m
t
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0079]
其中,t
m
为输出力矩,z方向为反作用轮的转动方向,t
mx
=t
my
=0,t
mz
=i
w
·
(ω
t
‑
ω
t
‑1),i
w
为反作用轮转动惯量,ω为反作用轮转速,t
d
为扰动力矩,其中
[0080][0081]
其中u
d
为动不平衡量,α0为初始相位。
[0082]
系统100可选地还可以包括敏感器模型104。敏感器模型104用于模拟模拟器,其从卫星姿态和轨道动力学模型接收相应信号以生成敏感器模拟信号。
[0083]
下面阐述根据本发明的卫星闭环测试的流程。
[0084]
·
首先,由执行器模型103根据例如从地面综测系统106接收的卫星遥测状态生成推力数据和输出力矩数据,其中执行器模型103被配置为对执行器进行建模,其中所述遥测状态包括卫星控制指令和反作用轮转速,并且其中所述执行器模型103包括推力器模型和反作用轮模型。
[0085]
·
然后,由姿态和轨道动力学模型102根据从执行器模型接收的推力数据和输出力矩数据生成卫星的轨道和姿态数据,其中所述姿态和轨道动力学模型其被配置为模拟卫星的真实飞行状态。
[0086]
·
最后,由动态模拟器101从姿态和轨道动力学模型102接收卫星的轨道和姿态数据以便给集成状态卫星105的卫星敏感器提供动态激励源。
[0087]
下面给出根据本发明的方案在高轨卫星上的示例性实施例。
[0088]
该卫星以单独卫星敏感器定姿作为主定姿模式,配置推力器、反作用轮和磁力矩器以完成卫星姿态和轨道控制。卫星每秒向地面综测系统106下发遥测状态数据,综测系统将相应数据重新组包后通过网络转发给测试系统100,测试系统100以5ms周期进行转发包查询,接收到转发数据后,5ms内完成执行器模型103的计算、动力学模型102的计算以及模拟器输入(即敏感器模型104)的计算,之后以100ms周期驱动模拟器产生模拟器激励信号。卫星敏感器采集模拟器信号,1s内完成控制器计算并下发遥测。
[0089]
卫星集成后的大型试验,包括集成测试、热真空试验以及老练试验等,均采用本方法进行全任务阶段的闭环测试,取得了良好的效果。下面以卫星进行热真空试验时的闭环测试为例,说明本发明在应用过程中的优越性。
[0090]
卫星热真空试验采用本发明提供的方法,在高低温各工况,开展了全部任务模式(包括对日定向模式、对地定向模式、正常工作模式以及轨道控制模式)的闭环测试。对日定向模式卫星姿态控制曲线如图3所示,对地定向模式姿态控制曲线如图4所示,正常工作模式姿态控制曲线如图5所示,正常工作模式反作用轮转速曲线如图6所示,轨道控制模式姿态控制曲线如图7所示。试验过程中,单机和软件均工作在真实在轨状态,在各任务模式下的功能和性能均得到了充分的考核。
[0091]
本发明至少具有下列有益效果:第一,采用小型动态模拟器作为敏感器的激励源,由于模拟器探头部分具有轻便易于安装的特点,因此可在卫星集成状态下直接安装于敏感器表面,从而降低了将本发明应用于现有卫星测试系统的成本;第二,利用执行器控制指令以及反作用轮转速等卫星遥测参数作为输入进行执行器精确建模,解决了执行器进入测试闭环的问题,特别是反作用轮以转速建模的方式取代指令建模,确保单机以真实工作状态进行闭环测试;第三,以动力学时间为基准,自主进行星地时间同步,确保闭环测试过程的正确性。
[0092]
虽然本发明的一些实施方式已经在本技术文件中予以了描述,但是本领域技术人员能够理解,这些实施方式仅仅是作为示例示出的。本领域技术人员在本发明的教导下可以想到众多的变型方案、替代方案和改进方案而不超出本发明的范围。所附权利要求书旨在限定本发明的范围,并藉此涵盖这些权利要求本身及其等同变换的范围内的方法和结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

