1.本技术属于航空试验技术领域,特别涉及一种无人机半物理集成验证平台。
背景技术:
2.无人机装备在交付客户之前,需要进行充分的试验验证。如果无人机系统全部使用实物进行试验,尤其针对有特殊试验条件要求的验证科目,试验验证风险高、代价大、周期长。现有试验集成环境多为全模型的仿真试验环境,其试验精度较差、试验可信度较低,且试验环境通用性、适配性和环境移植性不佳。
3.因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现要素:
4.本技术的目的是提供了一种无人机半物理集成验证平台,以解决现有技术存在的至少一个问题。
5.本技术的技术方案是:
6.一种无人机半物理集成验证平台,包括:
7.全系统综合试验支撑环境,所述全系统综合试验支撑环境包括全系统试验管理系统、数据采集与处理系统、飞行仿真系统、卫星模拟器以及视景仿真系统;
8.飞管系统核心机环境,所述飞管系统核心机环境包括飞机管理计算机、惯导转台系统、数据链机载天线、舵机、舵面,以及用于支持试验的铁鸟台、舵面传感器、舵面加载设备;
9.地面控制站环境,所述地面控制站环境包括地面差分站、飞行控制席位、数据链路地面端机以及天线;
10.任务系统核心机环境,所述任务系统核心机环境包括任务系统计算机、任务系统专用设备激励器以及任务系统专用仿真模型;
11.其中,所述全系统综合试验支撑环境、所述飞管系统核心机环境、所述地面控制站环境、所述任务系统核心机环境的内部以及各环境之间通过试验网络或配电配线系统实现数据交互。
12.可选地,还包括可扩展的无人机系统环境,所述可扩展的无人机系统环境包括可扩展的无人机系统设备。
13.可选地,所述可扩展的无人机系统设备包括舰船模型以及雷达模型。
14.可选地,
15.所述全系统试验管理系统用于控制所述数据采集与处理系统、所述飞行仿真系统、所述任务系统专用仿真模型实现对环境内的仿真模型进行统一管理调度;
16.所述数据采集与处理系统用于采集各个环境中的数据信息,其中,所述地面控制站环境的数据信息通过所述天线发送给所述飞管系统核心机环境的飞机管理计算机后,再通过所述飞机管理计算机传输给所述数据采集与处理系统;
17.所述飞行仿真系统用于将飞行参数数据发送给所述卫星模拟器、所述视景仿真系统以及所述可扩展的无人机系统设备;
18.所述卫星模拟器用于根据接收的飞行参数数据生成第一卫星数据信息,并将所述第一卫星数据信息发送给所述飞管系统核心机环境中的惯导转台系统,以及根据接收的所述可扩展的无人机系统设备的模型信息生成第二卫星数据信息,并将所述第二卫星数据信息发送给所述可扩展的无人机系统设备,所述卫星模拟器还用于将所述第二卫星数据信息通过所述任务系统专用设备激励器发送给所述任务系统计算机;
19.所述视景仿真系统用于根据接收的飞行参数数据生成第一运动状态信息,并将所述第一运动状态信息发送给所述卫星模拟器,以及根据接收的所述可扩展的无人机系统设备的模型信息生成第二运动状态信息,并将所述第二运动状态信息发送给所述任务系统计算机。
20.可选地,
21.所述惯导转台系统用于根据接收的所述第一卫星数据信息生成惯导信息;
22.所述飞机管理计算机用于接收所述卫星模拟器的第一卫星数据信息以及第一运动状态信息,所述任务系统计算机的第二卫星数据信息以及第二运动状态信息,所述惯导转台系统的惯导信息以及所述舵面传感器反馈的舵面偏转信息,并根据接收的数据信息生成舵面控制指令,通过控制所述舵机实现舵面偏转;
23.所述舵面加载设备用于模拟飞机空中气动特性,对舵面进行加载。
24.可选地,所述惯导转台系统包括惯导系统以及三轴转台,所述惯导转台系统生成的惯导信息包括三轴加速度,三轴角速率以及三轴姿态信号。
25.可选地,
26.所述天线用于接收飞行参数数据,并将其发送给所述数据链地面端机;
27.所述数据链地面端机用于对所述天线发送来的飞行参数数据进行处理,并将处理后的飞行参数数据发送给所述飞行控制席位;
28.所述地面差分站用于获取第三卫星数据信息,并将其发送给所述飞行控制席位;
29.所述飞行控制席位用于根据接收的处理后的飞参数据信息以及第三卫星数据信息,生成飞行控制指令,并将飞行控制指令以及第三卫星数据信息发送给所述数据链地面端机,所述数据链地面端机将飞行控制指令以及第三卫星数据信息处理后,通过天线发送给所述飞机管理计算机;
30.所述飞机管理计算机还用于结合处理后的飞行控制指令以及第三卫星数据信息对舵面进行控制。
31.可选地,
32.所述任务系统计算机用于接收所述任务系统专用设备激励器的任务系统激励数据信息以及所述任务系统专用仿真模型的任务系统模型数据信息,并进行数据融合处理后,发送给所述飞机管理计算机;
33.所述飞机管理计算机还用于结合处理后的任务系统激励数据信息以及任务系统模型数据信息对舵面进行控制。
34.可选地,所述试验网络采用实时反射内存网以及高速千兆以太网双网体系结构。
35.可选地,所述配电配线系统包括:
36.网络数据转换模块,用于实现试验网络数据与rs422、rs485、rs232、离散量、pwm信号数据的转换;
37.模拟数据支持模块,用于支持模拟数据传输协议;
38.适配管理模块,用于实现仿真件与实物件的网络通信。
39.发明至少存在以下有益技术效果:
40.本技术的无人机半物理集成验证平台,将部分无人机关键机载设备、仿真模型、专用激励器、铁鸟台和试验支撑设备等进行分布式集成,组建一套无人机半物理集成验证平台,能够实现对无人机各系统进行综合半物理试验验证和全周期试验模拟。
附图说明
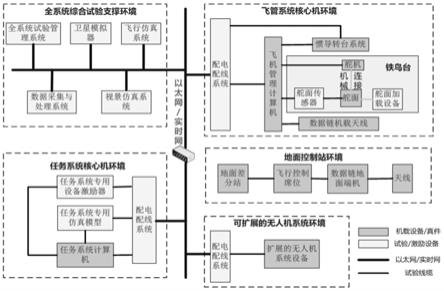
41.图1是本技术一个实施方式的无人机半物理集成验证平台示意图;
42.图2是本技术一个实施方式的全系统试验管理系统的数据流示意图。
具体实施方式
43.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图对本技术的实施例进行详细说明。
44.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
45.下面结合附图1至图2对本技术做进一步详细说明。
46.本技术提供了一种无人机半物理集成验证平台,包括:全系统综合试验支撑环境、飞管系统核心机环境、地面控制站环境以及任务系统核心机环境。
47.具体的,如图1所示,全系统综合试验支撑环境包括全系统试验管理系统、数据采集与处理系统、飞行仿真系统、卫星模拟器以及视景仿真系统;飞管系统核心机环境包括飞机管理计算机、惯导转台系统、数据链机载天线、舵机、舵面,以及用于支持试验的铁鸟台、舵面传感器、舵面加载设备;地面控制站环境包括地面差分站、飞行控制席位、数据链路地面端机以及天线;任务系统核心机环境包括任务系统计算机、任务系统专用设备激励器以及任务系统专用仿真模型;其中,全系统综合试验支撑环境、飞管系统核心机环境、地面控制站环境、任务系统核心机环境的内部以及各环境之间通过试验网络或配电配线系统实现数据交互。
48.本技术的无人机半物理集成验证平台,还包括可扩展的无人机系统环境,平台具有扩展能力,如后续需要增加其他试验环境,可进行扩展开发。本实施例中,可扩展的无人
机系统环境包括可扩展的无人机系统设备,可扩展的无人机系统设备包括舰船模型以及雷达模型。
49.本技术的无人机半物理集成验证平台,全系统综合试验支撑环境包括全系统试验管理系统、数据采集与处理系统、飞行仿真系统、卫星模拟器以及视景仿真系统。其中,全系统试验管理系统用于控制数据采集与处理系统、飞行仿真系统、任务系统专用仿真模型实现对环境内的仿真模型进行统一管理调度;数据采集与处理系统用于采集各个环境中的数据信息,其中,地面控制站环境的数据信息通过天线发送给飞管系统核心机环境的飞机管理计算机后,再通过飞机管理计算机传输给数据采集与处理系统;飞行仿真系统用于将飞行参数数据发送给卫星模拟器、视景仿真系统以及可扩展的无人机系统设备;卫星模拟器用于根据接收的飞行参数数据生成第一卫星数据信息,并将第一卫星数据信息发送给飞管系统核心机环境中的惯导转台系统,以及根据接收的可扩展的无人机系统设备的模型信息生成第二卫星数据信息,并将第二卫星数据信息发送给可扩展的无人机系统设备(主要是舰船模型),卫星模拟器还用于将第二卫星数据信息通过任务系统专用设备激励器发送给任务系统计算机;视景仿真系统用于根据接收的飞行参数数据生成第一运动状态信息,并将第一运动状态信息发送给卫星模拟器,以及根据接收的可扩展的无人机系统设备(主要是舰船模型)的模型信息生成第二运动状态信息,并将第二运动状态信息发送给任务系统计算机。
50.本技术的无人机半物理集成验证平台,全系统试验管理系统利用实时仿真系统对环境内所有仿真模型统一管理调度,基于实时仿真系统,所有仿真模型采用模块化增量式建模方式,可以满足快速更改和快速原型验证的需求,并保证模型的延续性和一致性。同时实现环境内同一设备仿真模型和实际真件的切换功能。
51.在本技术的优选实施例中,全系统试验管理系统的数据流如图2所示,其实现的关键技术包括:
52.(1)模型变量数据通过模型变量模块读取/写入共享内存;
53.(2)依据用户配置的变量
‑
icd域的配置信息,进行变量到icd的打解包,依据dds配置信息从dds上读取/发送icd数据;
54.(3)输入输出服务程序依据icd输入输出配置文件,向输入输出设备端口读取/发送数据;
55.(4)模型间通过共享内存直接交互;
56.(5)模型的输入可以来自输入输出设备,也可以来自其他仿真模型;
57.(6)模型的输出可以给输入输出设备,也可以发送至其他仿真模型。
58.在本技术的优选实施例中,数据采集与处理系统作为集成验证环境的一部分,其实现的关键技术包括:
59.(1)提供数据交互的中间服务和硬件接口资源,为试验系统的仿真数据收发、激励数据生成和数据采集提供软硬件支持;
60.(2)保证所有输入输出接口资源能够保持良好的工作状态;
61.(3)提供数据采集监控软件服务。
62.在本技术的优选实施例中,飞行仿真系统作为一个仿真模型,应用于全系统综合试验的各个阶段,其实现的关键技术包括:
63.(1)模拟发动机等各部件模拟量、离散量信号;
64.(2)为全系统综合试验环境提供动态激励数据;
65.(3)支持飞机管理系统与地面控制站的地面综合仿真/试验验证。
66.在本技术的优选实施例中,卫星模拟器作为支撑试验的模拟器,其实现的关键技术包括:
67.(1)模拟卫星在轨位置分布和运动方程;
68.(2)向机载差分卫导模块提供源码信息。
69.在本技术的优选实施例中,视景仿真系统能够动态实时地展现飞机模拟飞行的运动状态,其实现的关键技术包括:
70.(1)模拟视场内的景物,直观地显示环境要素,形成各种视觉上的环境物理效应,产生虚拟视景;
71.(2)为试验人员提供真实的空域环境、体验飞机运动效果。
72.本技术的无人机半物理集成验证平台,飞管系统核心机环境包括飞机管理计算机、惯导转台系统、数据链机载天线、舵机、舵面,以及用于支持试验的铁鸟台、舵面传感器、舵面加载设备。其中,惯导转台系统用于根据接收的第一卫星数据信息生成惯导信息;飞机管理计算机用于接收卫星模拟器的第一卫星数据信息以及第一运动状态信息,任务系统计算机的第二卫星数据信息以及第二运动状态信息,惯导转台系统的惯导信息以及舵面传感器反馈的舵面偏转信息,并根据接收的数据信息生成舵面控制指令,通过控制舵机实现舵面偏转;舵面加载设备用于模拟飞机空中气动特性,对舵面进行加载。
73.在本技术的优选实施例中,飞机管理计算机采用机载真件设备,其具有飞行器管理系统的逻辑处理功能以及飞行器管理系统的控制解算功能。
74.在本技术的优选实施例中,舵机、舵面及其连接方式采用机载真件设备,使用舵面加载设备给提供压力,通过搭建铁鸟台,能够实现舵面真实偏转,利用舵面传感器将舵面位置信号反馈到试验环境中,利用舵面加载设备模拟真实空中舵面响应特性。数据链机载天线采用机载真件设备,用于接收地面控制站系统无线遥控指令来控制无人机的飞行,并下传至地面控制站系统无人机飞机设备状态和航迹等信息。
75.在本技术的优选实施例中,惯导转台系统包括惯导系统及三轴转台:惯导系统采用机载真件设备,三轴转台为试验支撑设备,其能够接收飞管计算机控制指令信息,转台模拟控制指令,惯导系统生成三轴加速度,三轴角速率以及三轴姿态信号,并向飞管计算机输出三轴加速度,三轴角速率以及三轴姿态信号。
76.本技术的无人机半物理集成验证平台,地面控制站环境包括地面差分站、飞行控制席位、数据链路地面端机以及天线。天线用于接收飞行参数数据,并将其发送给数据链地面端机;数据链地面端机用于对天线发送来的飞行参数数据进行处理,并将处理后的飞行参数数据发送给飞行控制席位;地面差分站用于获取第三卫星数据信息,并将其发送给飞行控制席位;飞行控制席位用于根据接收的处理后的飞参数据信息以及第三卫星数据信息,生成飞行控制指令,并将飞行控制指令以及第三卫星数据信息发送给数据链地面端机,数据链地面端机将飞行控制指令以及第三卫星数据信息处理后,通过天线发送给飞机管理计算机;飞机管理计算机还用于结合处理后的飞行控制指令以及第三卫星数据信息对舵面进行控制。
77.在本技术的优选实施例中,飞行控制席位提供运行控制平台,能够实现发送控制指令,控制无人机的飞行,在飞行过程中,显示无人机的姿态、位置等状态信息,以及完成下传飞行数据的解算处理。本实施例中,地面差分站是为了提高无人机的定位精度,其在伪距差分模式,用于动态测量gps信号的误差;通过无线链路将伪距信息上传至机上的差分gps模块。数据链路地面端机以及天线能够实现上传地面控制站系统无线遥控指令来控制无人机的飞行,并接收无人机飞机设备状态和航迹等信息。
78.本技术的无人机半物理集成验证平台,任务系统核心机环境包括任务系统计算机、任务系统专用设备激励器以及任务系统专用仿真模型。任务系统计算机用于接收任务系统专用设备激励器的任务系统激励数据信息以及任务系统专用仿真模型的任务系统模型数据信息,并进行数据融合处理后,发送给飞机管理计算机;飞机管理计算机还用于结合处理后的任务系统激励数据信息以及任务系统模型数据信息对舵面进行控制。
79.本技术的无人机半物理集成验证平台,任务系统计算机主要完成任务系统设备状态监控、数据综合配置与管理、健康管理等。任务系统专用设备激励器以及专用仿真模型主要为了配合无人机完成的任务形式而配置的设备或模型,例如无人机为攻击型无人机,需要配置以武器为主的相关机载设备管、激励器和仿真模型;该无人机为侦查型无人机,需要配置以探测、搜索为主的相关机载设备管、激励器和仿真模型。
80.本技术的无人机半物理集成验证平台,全系统综合试验支撑环境是一个大型的分布式试验环境,由多个飞机系统试验环境和综合试验支撑环境组成。在本技术的优选实施例中,实现各个环境内部以及环境之间数据交互的试验网络串联了大量的仿真模型、激励器、测试系统和专用设备,全系统在进行试验时,完成为设备与设备之间数据传输提供基础网络。在本技术的优选实施例中,试验网络采用实时反射内存网和高速千兆以太网双网体系结构,满足不同场景下对网络传输速度的要求。
81.进一步地,配电配线系统主要提供飞机集成验证平台的供电和信号汇接,其包括网络数据转换模块,模拟数据支持模块以及适配管理模块,分别实现以下功能:支持试验网络数据与rs422、rs485、rs232、离散量、pwm信号数据的转换;支持模拟数据传输协议;通过适配管理,实现仿真件和实物件的网络通信。
82.在本技术的一个具体实施方式中,采用无人机半物理集成验证平台实现无人机着舰包括以下过程:通过全系统试验管理系统设计无人机着舰用例,并测试着舰流程,控制所有环境中模型的运行,启动飞行仿真系统以及可扩展的无人机系统设备,即舰船模型,其包括舰船运动模块和舰船卫星处理模块,卫星模拟器接收飞行仿真系统以及扩展的无人机系统设备的数据信息生成第一卫星数据和第二卫星数据,并将第一卫星数据发送给惯导转台系统,将第二卫星数据发送给舰船卫星处理模块,进一步将第二卫星数据通过任务系统专用设备激励器发送给任务系统计算机;飞机管理计算机接收惯导转台系统发送的第一卫星数据以及任务系统计算机发送的第二卫星数据,并生成无人机着舰相对位置信息;飞机管理计算机接收地面控制站的着舰指令后,进而生成舵面控制指令,从而通过控制舵面完成无人机着舰。
83.本技术的无人机半物理集成验证平台,针对无人机试验要求的精度高、试验可信度高等特点,提出了一种无人机半物理集成验证平台。该平台采用虚实结合、动态闭环的验证手段,使用分布式架构,使全系统综合试验环境具备分系统集成能力;以实时网和高速以
太网双网体系结构构建通信网络,结合dds网络中间件技术,串联分系统环境,使全系统综合试验环境具备环境通信能力;以先进的仿真验证方法、科学的验证流程为指导,构建全系统综合试验支撑环境,统一管理和调度各分系统环境,使全系统综合试验环境具备全系统流程调度能力;采用试验环境切换技术,保证同一设备仿真模型与实物件无缝切换接入全系统综合试验环境。
84.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

