本申请是申请日为2015年2月13日、国际申请号为pct/us2015/015878、中国申请号为201580019489.x、名称为“用于组装用于烟制品的烟弹的方法”的专利申请的分案申请,在此,针对上述申请的已于2018年11月12日提交的申请号为201811338992.3、名称为“用于组装用于烟制品的烟弹的方法”的分案申请的第一次审查意见中指出的单一性问题,提出本分案申请。
本公开涉及用于例如烟制品等气溶胶递送装置的烟弹,并且更明确来说涉及用于组装用于烟制品的包含雾化器的烟弹的方法。所述雾化器可以经构造以加热可由烟草制成或得自烟草或以其它方式并入有烟草的气溶胶前驱体,以形成可吸入物质供人类消费。
背景技术:
香烟、雪茄和烟斗是采用各种形式的烟草的流行的烟制品。举例来说,传统类型的香烟具有大体上圆柱形杆形结构,且包含由包装纸包围的例如切碎的烟草(例如,呈切割填充物形式)等可吸烟材料的状态、卷或柱,进而形成所谓的“可吸烟杆”、“烟草杆”或“香烟杆”。通常,此香烟具有与烟草杆成端对端关系对准的圆柱形过滤器元件。优选地,过滤器元件包括由称为“成型纸”的纸材料环绕的增塑醋酸纤维素丝束。优选地,过滤器元件使用称为“接装纸”的环绕包装材料附接到烟草杆的一个末端。对接装材料和成型纸进行穿孔以便提供用环境空气对抽吸的主流烟的稀释也已经变为合意的。香烟及其各种组件的描述在davis等人(编者)的《烟草生产、化学和技术(tobaccoproduction,chemistryandtechnology)》(1999)中陈述;其以全文引用的方式并入本文。传统类型的香烟是由吸烟者通过点燃烟草杆的一个末端来采用。吸烟者接着通过在燃烧的香烟的相对末端(例如,过滤器末端或嘴端)上抽吸而将主流烟接收到他/她的嘴中。
多年来,已经努力改进需要烟草的燃烧以用于烟产生的烟制品的组件、构造和性能。据称已经提出的那些改进中的许多改进尝试提供与抽香烟、雪茄或烟斗相关联的感觉,但是没有递送由燃烧烟草产生的大量的不完全燃烧和热解的产物。参见例如在borschke等人的美国专利号7,753,056中描述、讨论或参考的各种参考;所述专利以全文引用的方式并入本文。
采用含碳燃料元素的某些类型的香烟已经以r.j.reynoldstobaccocompany的商标名“premier”和“eclipse”市售。参见例如在《对加热而非燃烧烟草的新香烟原型的化学和生物研究(chemicalandbiologicalstudiesonnewcigaretteprototypesthatheatinsteadofburntobacco)》(r.j.雷诺兹烟草公司专论(1988))和《吸入毒理学(inhalationtoxicology)》(12:5,1-58页,(2000))中描述的那些类型的香烟。另外,类似类型的香烟最近已经在日本由japantobaccoinc.以商标名“steamhotone”销售。此外,并入有用于热产生和气溶胶形成的含碳燃料元素的各种类型的烟产品最近已经在专利文献中陈述。参见例如以下专利中提出的类型的烟产品:borschke等人的美国专利号7,836,897;banerjee等人的8,469,035和sebastian等人的8,464,726;stone等人的美国专利公布号2012/0042885;tsuruizumi等人的2013/0019888;shinozaki等人的2013/0133675和poget等人的2013/0146075;gladden等人的pctwo号2012/0164077;raether等人的2013/098380;zuber等人的2013/098405;zuber等人的2013/098410和woodcock的2013/104914;baba等人的ep1808087和tsuruizumi等人的ep2550879;以上专利以全文引用的方式并入本文。
近年来,已经提出利用电能来加热和汽化挥发性材料或另外试图在没有将烟草燃烧到任何显著程度的情况下提供许多抽烟的感觉的众多烟产品、气味产生器和药用吸入器。参见例如以下专利中描述、讨论或参考的各种类型的气溶胶产生装置:robinson等人的美国专利号7,726,320;ampolini等人在2013年3月14日申请的美国专利申请序列号13/826,929;davis等人在2013年8月28日申请的14/011,992;以及bless等人在2014年2月3日申请的14/170,838;以上专利以全文引用的方式并入本文。
在此方面,已经采用电能产生热以用于烟或气溶胶形成的某些烟草产品以及具体来说已经称为电子香烟产品的某些产品已经变为在全世界商业出售。与传统类型的香烟、雪茄或烟斗的许多属性类似的代表性产品已经市售,如:philipmorrisincorporated的
在气溶胶递送装置中可采用的组件和相关技术的额外制造商、设计者和/或受让人包含:中国深圳的shenzhenjieshibotechnology;中国深圳的shenzhenfirstuniontechnology;加利福尼亚州洛杉矶的safecig;菲律宾的jantyasiacompany;中国深圳的joyetechchangzhouelectronics;sisresources;特拉华州多佛的b2binternationalholdings;俄亥俄州的evolvllc;意大利博洛尼亚的montrade;中国深圳的shenzhenbauwaytechnology;佛罗里达州庞帕诺比奇的globalvaportrademarksinc.;佛罗里达州劳德代尔堡的vaporcorp.;德国拉绍-马尔克尔斯巴赫的nemtragmbh;密歇根州阿勒根的perrigol.co.;needsco.,ltd.;内华达州拉斯维加斯的smokefreeinnotec;瑞典赫尔辛堡的mcneilab;chongcorp;加利福尼亚州山景城的alexzapharmaceuticals;北卡罗来纳州夏洛特的blec,llc;法国罗尔巴克莱比特克的gaitrendsarl;中国深圳的feellifebioscienceinternational;德国塞尔布的vishayelectronicbmgh;中国深圳的shenzhensmacotechnologyltd.;佛罗里达州伯克莱屯的vaporsystemsinternational;以色列的exonoidmedicaldevices;中国深圳的shenzhennowotechelectronic;中国香港的minilogicdevicecorporation;中国深圳的shenzhenkontleelectronics,和俄亥俄州梅地纳的fumainternational,llc,以及威斯康星州伯洛伊特的21stcenturysmoke。
然而,电子烟制品的实施例可能难以制造。在此方面,例如,电子烟制品中的各种组件可能相对小和/或脆弱。因此,关于制造电子烟制品的进步将是合意的。
技术实现要素:
本公开涉及经构造以产生气溶胶的气溶胶递送装置的组装。在一个方面中,提供一种用于组装用于气溶胶递送装置的烟弹的方法。所述方法可以包含:提供至少部分地围绕雾化器延伸的储集器衬底;提供经构造以至少部分地在其中接纳储集器衬底和雾化器的外部主体;以及通过工具将储集器衬底插入到外部主体中,所述工具界定经构造以减小储集器衬底的外部尺寸的漏斗部分,使得储集器衬底的外部尺寸小于或等于外部主体的内部尺寸以促进储集器衬底插入到外部主体中。
在一些实施例中,所述方法可以进一步包括在通过工具将储集器衬底插入到外部主体中的同时相对于储集器衬底扭转所述工具。提供至少部分地围绕雾化器延伸的储集器衬底可以包括在通过工具将储集器衬底插入到外部主体中之前至少部分地围绕雾化器缠绕储集器衬底。至少部分地围绕雾化器缠绕储集器衬底可以包括将空气流引导于储集器衬底处。
在一些实施例中,所述方法可以进一步包括当开始通过所述工具将所述储集器衬底插入到所述外部主体中时使所述储集器衬底与一个或多个指状物接合以使得所述储集器衬底保持至少部分地缠绕在所述雾化器周围。所述方法可以进一步包括当所述储集器衬底插入到所述工具中达到预定深度时从所述储集器衬底释放所述一个或多个指状物。释放所述一个或多个指状物可以包括通过使所述一个或多个指状物与工具接触而使所述一个或多个指状物偏转远离储集器衬底。释放所述一个或多个指状物可以包括循序地释放所述指状物。所述方法可以进一步包括在至少部分地围绕雾化器缠绕储集器衬底之前将雾化器耦接到基座,且在通过工具将储集器衬底插入到外部主体中之后将外部主体耦接到基座。另外,所述方法可以包含从大体上连续的储集器衬底输入供应储集器衬底,且控制大体上连续的储集器衬底输入中的张力。
在额外方面中,提供一种用于组装用于气溶胶递送装置的雾化器的方法。所述方法可以包括:提供第一加热端子、第二加热端子和加热元件;确定所述第一加热端子和所述第二加热端子的位置;确定所述加热元件的位置;以及基于所述第一加热端子和所述第二加热端子的所述位置以及所述加热元件的所述位置将所述加热元件附着到所述第一加热端子和所述第二加热端子。
在一些实施例中,确定第一加热端子和第二加热端子的位置可以包括确定第一加热端子突片与第二加热端子突片之间的中点。所述加热元件可以包括第一接触部分和第二接触部分,且确定加热元件的位置可以包括确定第一接触部分与第二接触部分之间的中点。所述方法可以进一步包括使第一加热端子突片与第二加热端子突片之间的中点和第一接触部分与第二接触部分之间的中点对准,使第一接触部分与第一加热端子突片接合,且使第二接触部分与第二加热端子突片接合。
在一些实施例中,所述方法可以进一步包括夹持第一加热端子和第二加热端子以使得第一加热端子突片和第二加热端子突片大体上共面。夹持第一加热端子和第二加热端子可以包括调整第一加热端子与第二加热端子之间的间距。将加热元件附着到第一加热端子和第二加热端子可以包括将激光束引导于第一加热端子突片处和第二加热端子突片处。将激光束引导于第一加热端子突片处和第二加热端子突片处可以包括将激光束引导于第一加热端子突片和第二加热端子突片的与加热元件相对的背侧处。
所述方法可以进一步包括在将激光束引导于第一加热端子突片处和第二加热端子突片处之前将加热元件、第一加热端子和第二加热端子插入到大体上密封的腔室中。提供加热元件可以包括从大体上连续的加热元件输入供应加热元件,且控制大体上连续的加热元件输入中的张力。所述方法可以进一步包括将加热元件耦接到液体输送元件。提供第一加热端子和第二加热端子可以包括从大体上连续的第一加热端子输入供应第一加热端子,且从大体上连续的第二加热端子输入供应第二加热端子。所述加热元件可以包括围绕液体输送元件卷绕的导线。所述导线可以包括两个接触部分、一个中心部分以及定位于所述接触部分之外的两个外部部分,所述导线的两个接触部分和中心部分界定加热元件,其中所述接触部分界定第一线圈间距,所述中心部分界定第二线圈间距,且所述外部部分界定第三线圈间距,第三线圈间距大于第二线圈间距,且第二线圈间距大于第一线圈间距,且将加热元件附着到第一加热端子和第二加热端子可以包括将所述接触部分附着到第一加热端子和第二加热端子。
在额外方面中,提供一种测试固定装置。所述测试固定装置可以包括:插口,其经构造以接合烟弹的基座;第一和第二电触点,其耦接到所述插口且经构造以接合所述烟弹的雾化器的第一和第二加热端子;以及控制器,其经构造以当所述烟弹的所述基座与所述插口接合时通过所述电触点与所述烟弹连通以测试所述烟弹。所述控制器可经构造以确定烟弹的雾化器的电阻且将所述电阻与所需电阻进行比较。
在一些实施例中,所述控制器可进一步经构造以确定雾化器是否短接到烟弹的外部主体。所述测试固定装置可进一步包括第三电触点,所述第三电触点耦接到所述插口且经构造以接合所述烟弹的控制组件端子。所述控制器可经构造以通过第三电触点和控制组件端子将程序代码指令传输到烟弹的电子控制组件。所述控制器可进一步经构造以读取存储在电子控制组件上的程序代码指令,且确定存储在电子控制组件上的程序代码指令是否对应于所需的程序代码指令。所述测试固定装置可进一步包括定位于所述插口的相对侧上的狭槽,所述狭槽经构造以接纳夹爪以使得所述夹爪可以在所述基座下方抓住以从所述插口移除所述烟弹。所述测试固定装置可以进一步包括经构造以提供通过烟弹的基座的空气流的孔口。
在额外方面中,提供一种烟弹填充方法。所述方法可以包含:提供用于气溶胶递送装置的烟弹,所述烟弹包括定位于外部主体中的储集器衬底;接近于所述储集器衬底的多个角度部分循序地定位填充装置的出口;以及通过所述填充装置的所述出口将气溶胶前驱体组合物的流引导于所述储集器衬底的所述角度部分中的每一者处。
在一些实施例中,填充装置的出口可以保持不与储集器衬底接触。所述方法可进一步包括在多个填充站之间输送所述烟弹,其中在所述填充站中的每一者处将所述气溶胶前驱体组合物的所述流引导到所述储集器衬底的所述角度部分中的至少一者。可以在填充站中的第一者处将气溶胶前驱体组合物的流引导于储集器衬底的角度部分中的每一者处。可以在填充站中的剩余部分处分别将气溶胶前驱体组合物的流引导到储集器衬底的角度部分中的一者。所述方法可以进一步包括控制其中填充烟弹的周围环境,使得所述周围环境界定小于约40%的相对湿度。
在额外方面中,提供一种用于组装用于气溶胶递送装置的烟弹的方法。所述方法可以包括:抓住基座;提供经构造以接合所述基座的多个组件,所述组件提供于静止位置中;以及通过将所述基座引导为与处于所述静止位置中的所述组件接触而将所述组件耦接到所述基座。
在一些实施例中,抓住基座可以包括抓住基座的经构造以接合控制主体的附接末端的内表面。将基座引导为与处于静止位置中的组件接触可以包括将基座向下引导为与所述组件接触。所述方法可以进一步包括将基座插入到固定装置中,且检查通过所述固定装置耦接到基座的第一和第二加热端子的位置。
在额外方面中,提供一种输送系统,其经构造以在烟制品的组装期间输送用于所述烟制品的烟弹。所述输送系统可以包括:轨道;托架,其经构造以接合所述轨道且沿着所述轨道移动,所述托架包括经构造以在烟弹的组装期间接合所述烟弹的一个或多个组件的夹持机构;以及锁定设备,其经构造以临时约束所述托架沿着所述轨道的移动。
在一些实施例中,所述夹持机构可经构造以接合所述烟弹的基座。所述锁定设备可以包括耦接到所述托架的定位器机构以及经构造以接合所述定位器机构的接合机构。所述定位器机构可以包括多个栓柱。所述接合机构可以包括辊。
本发明包含(不限于)以下实施例。
实施例1:一种用于组装用于气溶胶递送装置的烟弹的方法,所述方法包括:
提供至少部分地围绕雾化器延伸的储集器衬底;
提供经构造以至少部分地在其中接纳所述储集器衬底和所述雾化器的外部主体;以及
通过工具将所述储集器衬底插入到所述外部主体中,所述工具界定经构造以减小所述储集器衬底的外部尺寸的漏斗部分,使得所述储集器衬底的所述外部尺寸小于或等于所述外部主体的内部尺寸以促进所述储集器衬底插入到所述外部主体中。
实施例2:根据任何前述或后续实施例的方法,其进一步包括在通过所述工具将所述储集器衬底插入到所述外部主体中的同时使所述工具相对于所述储集器衬底扭转。
实施例3:根据任何前述或后续实施例的方法,其中提供至少部分地围绕所述雾化器延伸的所述储集器衬底包括在通过所述工具将所述储集器衬底插入到所述外部主体中之前至少部分地围绕所述雾化器缠绕所述储集器衬底。
实施例4:根据任何前述或后续实施例的方法,其中至少部分地围绕所述雾化器缠绕所述储集器衬底包括将空气流引导于所述储集器衬底处。
实施例5:根据任何前述或后续实施例的方法,其进一步包括当开始通过所述工具将所述储集器衬底插入到所述外部主体中时使所述储集器衬底与一个或多个指状物接合以使得所述储集器衬底保持至少部分地缠绕在所述雾化器周围。
实施例6:根据任何前述或后续实施例的方法,其进一步包括当所述储集器衬底插入到所述工具中达到预定深度时从所述储集器衬底释放所述一个或多个指状物。
实施例7:根据任何前述或后续实施例的方法,其中释放所述一个或多个指状物包括通过使所述一个或多个指状物与所述工具接触而使所述一个或多个指状物偏转远离所述储集器衬底。
实施例8:根据任何前述或后续实施例的方法,其中释放所述一个或多个指状物包括循序地释放所述指状物。
实施例9:根据任何前述或后续实施例的方法,其进一步包括在至少部分地围绕所述雾化器缠绕所述储集器衬底之前将所述雾化器耦接到基座;以及
在通过所述工具将所述储集器衬底插入到所述外部主体中之后将所述外部主体耦接到所述基座。
实施例10:根据任何前述或后续实施例的方法,其进一步包括从大体上连续的储集器衬底输入供应所述储集器衬底;以及
控制所述大体上连续的储集器衬底输入中的张力。
实施例11:一种用于组装用于气溶胶递送装置的雾化器的方法,所述方法包括:
提供第一加热端子、第二加热端子和加热元件;
确定所述第一加热端子和所述第二加热端子的位置;
确定所述加热元件的位置;以及
基于所述第一加热端子和所述第二加热端子的所述位置以及所述加热元件的所述位置将所述加热元件附着到所述第一加热端子和所述第二加热端子。
实施例12:根据任何前述或后续实施例的方法,其中确定所述第一加热端子和所述第二加热端子的所述位置包括确定第一加热端子突片与第二加热端子突片之间的中点。
实施例13:根据任何前述或后续实施例的方法,其中所述加热元件包括第一接触部分和第二接触部分,且
其中确定所述加热元件的所述位置包括确定所述第一接触部分与所述第二接触部分之间的中点。
实施例14:根据任何前述或后续实施例的方法,其进一步包括使所述第一加热端子突片与所述第二加热端子突片之间的所述中点和所述第一接触部分与所述第二接触部分之间的所述中点对准;
使所述第一接触部分与所述第一加热端子突片接合;以及
使所述第二接触部分与所述第二加热端子突片接合。
实施例15:根据任何前述或后续实施例的方法,其进一步包括夹持所述第一加热端子和所述第二加热端子以使得所述第一加热端子突片和所述第二加热端子突片大体上共面。
实施例16:根据任何前述或后续实施例的方法,其中夹持所述第一加热端子和所述第二加热端子包括调整所述第一加热端子与所述第二加热端子之间的间距。
实施例17:根据任何前述或后续实施例的方法,其中将所述加热元件附着到所述第一加热端子和所述第二加热端子包括将激光束引导于所述第一加热端子突片处和所述第二加热端子突片处。
实施例18:根据任何前述或后续实施例的方法,其中将所述激光束引导于所述第一加热端子突片处和所述第二加热端子突片处包括将所述激光束引导于所述第一加热端子突片和所述第二加热端子突片的与所述加热元件相对的背侧处。
实施例19:根据任何前述或后续实施例的方法,其进一步包括在将所述激光束引导于所述第一加热端子突片处和所述第二加热端子突片处之前将所述加热元件、所述第一加热端子和所述第二加热端子插入到大体上密封的腔室中。
实施例20:根据任何前述或后续实施例的方法,其中提供所述加热元件包括:
从大体上连续的加热元件输入供应所述加热元件;以及
控制所述大体上连续的加热元件输入中的张力。
实施例21:根据任何前述或后续实施例的方法,其进一步包括将所述加热元件耦接到液体输送元件。
实施例22:根据任何前述或后续实施例的方法,其中提供所述第一加热端子和所述第二加热端子包括:
从大体上连续的第一加热端子输入供应所述第一加热端子;以及
从大体上连续的第二加热端子输入供应所述第二加热端子。
实施例23:根据任何前述或后续实施例的方法,其中所述加热元件包括围绕液体输送元件卷绕的导线。
实施例24:根据任何前述或后续实施例的方法,其中所述导线包括两个接触部分、一个中心部分以及定位于所述接触部分之外的两个外部部分,所述导线的所述两个接触部分和所述中心部分界定所述加热元件,
其中所述接触部分界定第一线圈间距,所述中心部分界定第二线圈间距,且所述外部部分界定第三线圈间距,所述第三线圈间距大于所述第二线圈间距,且所述第二线圈间距大于所述第一线圈间距,且
其中将所述加热元件附着到所述第一加热端子和所述第二加热端子包括将所述接触部分附着到所述第一加热端子和所述第二加热端子。
实施例25:一种测试固定装置,其包括:
插口,其经构造以接合烟弹的基座;
第一和第二电触点,其耦接到所述插口且经构造以接合所述烟弹的雾化器的第一和第二加热端子;
控制器,其经构造以当所述烟弹的所述基座与所述插口接合时通过所述电触点与所述烟弹连通以测试所述烟弹。
实施例26:根据任何前述或后续实施例的测试固定装置,其中所述控制器经构造以确定所述烟弹的所述雾化器的电阻且将所述电阻与所需电阻进行比较。
实施例27:根据任何前述或后续实施例的测试固定装置,其中所述控制器进一步经构造以确定所述雾化器是否短接到所述烟弹的外部主体。
实施例28:根据任何前述或后续实施例的测试固定装置,其进一步包括第三电触点,所述第三电触点耦接到所述插口且经构造以接合所述烟弹的控制组件端子。
实施例29:根据任何前述或后续实施例的测试固定装置,其中所述控制器经构造以通过所述第三电触点和所述控制组件端子将程序代码指令传输到所述烟弹的电子控制组件。
实施例30:根据任何前述或后续实施例的测试固定装置,其中所述控制器进一步经构造以读取存储在所述电子控制组件上的程序代码指令,且确定存储在所述电子控制组件上的所述程序代码指令是否对应于所需的程序代码指令。
实施例31:根据任何前述或后续实施例的测试固定装置,其进一步包括定位于所述插口的相对侧上的狭槽,所述狭槽经构造以接纳夹爪以使得所述夹爪可以在所述基座下方抓住以从所述插口移除所述烟弹。
实施例32:根据任何前述或后续实施例的测试固定装置,其中所述测试固定装置包括经构造以提供通过所述烟弹的所述基座的空气流的孔口。
实施例33:一种烟弹填充方法,其包括:
提供用于气溶胶递送装置的烟弹,所述烟弹包括定位于外部主体中的储集器衬底;
接近于所述储集器衬底的多个角度部分循序地定位填充装置的出口;以及
通过所述填充装置的所述出口将气溶胶前驱体组合物的流引导于所述储集器衬底的所述角度部分中的每一者处。
实施例34:根据任何前述或后续实施例的烟弹填充方法,其中所述填充装置的所述出口保持不与所述储集器衬底接触。
实施例35:根据任何前述或后续实施例的烟弹填充方法,其进一步包括在多个填充站之间输送所述烟弹,其中在所述填充站中的每一者处将所述气溶胶前驱体组合物的所述流引导到所述储集器衬底的所述角度部分中的至少一者。
实施例36:根据任何前述或后续实施例的烟弹填充方法,其中在所述填充站中的第一者处将所述气溶胶前驱体组合物的所述流引导于所述储集器衬底的所述角度部分中的每一者处。
实施例37:根据任何前述或后续实施例的烟弹填充方法,其中在所述填充站的剩余部分处分别将所述气溶胶前驱体组合物的所述流引导到所述储集器衬底的所述角度部分中的一者。
实施例38:根据任何前述或后续实施例的烟弹填充方法,其进一步包括控制其中填充所述烟弹的周围环境,使得所述周围环境界定小于约40%的相对湿度。
实施例39:一种用于组装用于气溶胶递送装置的烟弹的方法,其包括:
抓住基座;
提供经构造以接合所述基座的多个组件,所述组件提供于静止位置中;以及
通过将所述基座引导为与处于所述静止位置中的所述组件接触而将所述组件耦接到所述基座。
实施例40:根据任何前述或后续实施例的方法,其中抓住所述基座包括抓住所述基座的经构造以接合控制主体的附接末端的内表面。
实施例41:根据任何前述或后续实施例的方法,其中将所述基座引导为与处于所述静止位置中的所述组件接触包括将所述基座向下引导为与所述组件接触。
实施例42:根据任何前述或后续实施例的方法,其进一步包括将所述基座插入到固定装置中;以及
检查通过所述固定装置耦接到所述基座的第一和第二加热端子的位置。
实施例43:一种输送系统,其经构造以在烟制品的组装期间输送用于所述烟制品的烟弹,所述输送系统包括:
轨道;
托架,其经构造以接合所述轨道且沿着所述轨道移动,所述托架包括经构造以在烟弹的组装期间接合所述烟弹的一个或多个组件的夹持机构;以及
锁定设备,其经构造以临时约束所述托架沿着所述轨道的移动。
实施例44:根据任何前述或后续实施例的输送系统,其中所述夹持机构经构造以接合所述烟弹的基座。
实施例45:根据任何前述或后续实施例的输送系统,其中所述锁定设备包括耦接到所述托架的定位器机构以及经构造以接合所述定位器机构的接合机构。
实施例46:根据任何前述或后续实施例的输送系统,其中所述定位器机构包括多个栓柱。
实施例47:根据任何前述或后续实施例的输送系统,其中所述接合机构包括辊。
通过阅读以下详细描述以及下文简要描述的附图,本公开的这些和其它特征、方面和优点将是显而易见的。本发明包含上述实施例中的两者、三者、四者或四者以上的任何组合以及本公开中陈述的任何两个、三个、四个或四个以上特征或元件的组合,不管所述特征或元件是否在本文中的特定实施例描述中明确地进行组合。希望整体地阅读本公开,使得除非上下文另外清楚地指示,否则在所公开的发明的各种方面和实施例中的任一者中,所公开的发明的任何可分离的特征或元件应被视为既定是可组合的。
附图说明
因此,已经在前文概括地描述了本公开,现在将参考附图,附图不一定按比例绘制,并且其中:
图1说明根据本公开的实例实施例的包括烟弹和控制主体的气溶胶递送装置,所述烟弹说明为处于分解构造中且所述控制主体说明为处于组装构造中;
图2说明根据本公开的实例实施例的处于分解构造中的图1的控制主体;
图3示意性说明根据本公开的实例实施例的用于制造用于气溶胶递送装置的烟弹的系统,其包含烟弹组装子系统、烟弹填充子系统、烟弹封盖子系统、烟弹加标签子系统以及检查子系统;
图4示意性说明根据本公开的实例实施例的图3的烟弹组装子系统的第一实施例;
图5说明根据本公开的实例实施例的图4的烟弹组装子系统的托架的透视图;
图6说明根据本公开的实例实施例的其中保持有基座的图5的托架;
图7说明根据本公开的实例实施例的具有从其脱离的接合机构的图5的托架的侧视图;
图8说明根据本公开的实例实施例的具有与其接合的接合机构的图5的托架的后视图;
图9说明根据本公开的实例实施例的包括多个端子的大体上连续端子输入的透视图;
图10说明根据本公开的实例实施例的图4的烟弹组装子系统的端子密封子站的透视图;
图11说明根据本公开的实例实施例的图10的端子密封子站的密封剂施配器的放大透视图;
图12说明根据本公开的实例实施例的图4的烟弹组装子系统的加热元件耦接子站的透视图;
图13说明根据本公开的实例实施例的图4的烟弹组装子系统的大体上连续的加热元件输入的透视图;
图14说明根据本公开的实例实施例的图12的加热元件耦接子站的准备部分的透视图;
图15示意性说明根据本公开的实例实施例的图14的加热元件耦接子站的准备部分;
图16说明根据本公开的实例实施例的图12的加热元件耦接子站的准备部分的替代透视图;
图17说明根据本公开的实例实施例的图12的加热元件耦接子站的焊接部分的透视图;
图18说明根据本公开的实例实施例的图17的加热元件耦接子站的焊接部分的放大透视图;
图19示意性说明根据本公开的实例实施例的处于打开构造中的图17的加热元件耦接子站的焊接部分的端子固定机构;
图20示意性说明根据本公开的实例实施例的处于中间构造中的图19的端子固定机构;
图21示意性说明根据本公开的实例实施例的处于闭合构造中的图19的端子固定机构;
图22示意性说明根据本公开的实例实施例的处于打开构造中的图19的端子固定机构的替代实施例;
图23示意性说明根据本公开的实例实施例的加热元件与加热端子的对准;
图24示意性说明根据本公开的实例实施例将加热元件焊接到图23的加热端子;
图25说明根据本公开的实例实施例的保持于弯曲构造中的液体输送元件的透视图;
图26说明根据本公开的实例实施例的图4的烟弹组装子系统的储集器耦接子站的透视图;
图27说明根据本公开的实例实施例的图26的储集器耦接子站的可移动夹具的透视图,其处于在大体上连续的储集器衬底输入的施配期间的上限处;
图28说明根据本公开的实例实施例的图27的可移动夹具的透视图,其处于在大体上连续的储集器衬底输入的施配期间的下限处;
图29说明根据本公开的实例实施例的在储集器衬底的接纳期间图26的储集器耦接子站的传送机构的透视图;
图30说明根据本公开的实例实施例的接近于图26的储集器耦接子站的指状物的图29的传送机构的透视图;
图31说明根据本公开的实例实施例的图26的储集器耦接子系统的指状物朝向图29的传送机构的移动的透视图;
图32说明根据本公开的实例实施例的图26的储集器耦接子站的指状物的夹持;
图33示意性说明根据本公开的实例实施例使用图26的储集器耦接子站围绕加热元件缠绕储集器衬底;
图34说明根据本公开的实例实施例的图4的烟弹组装子系统的外部主体耦接子站的外部主体供应机构;
图35说明根据本公开的实例实施例的经构造以在图34的外部主体耦接子站的储集器衬底上方引导外部主体的工具的区段;
图36说明根据本公开的实例实施例使用图26的储集器耦接子系统的指状物在储集器衬底上方引导外部主体;
图36a说明根据本公开的替代实例实施例使用多对指状物在储集器衬底上方引导外部主体;
图37说明根据本公开的实例实施例的图34的外部主体耦接子站的卷曲器的透视图;
图38说明根据本公开的实例实施例的图37的卷曲器的区段的侧视图;
图39说明根据本公开的实例实施例的图37的卷曲器的区段的放大部分透视图;
图40示意性说明根据本公开的实例实施例的图3的烟弹组装子系统的第二实施例;
图41说明根据本公开的实例实施例的图40的烟弹组装子系统的俯视图;
图42说明根据本公开的实例实施例的图40的烟弹组装子系统的端子耦接子站的透视图;
图43说明根据本公开的实例实施例的图42的端子耦接子站的基座夹爪的透视图;
图44说明根据本公开的实例实施例的图42的端子耦接子站的裸片的透视图;
图44a说明图44的裸片的放大透视图;
图45说明根据本公开的实例实施例的图42的端子耦接子站的传送部件;
图46说明根据本公开的实例实施例的图40的烟弹组装子系统的控制组件耦接子站的透视图;
图47说明根据本公开的实例实施例的图46的控制组件耦接子站的放大透视图;
图48说明根据本公开的实例实施例的图40的烟弹组装子系统的流管耦接子站的透视图;
图49说明根据本公开的实例实施例的图40的烟弹组装子系统的端子夹爪的侧视图;
图50说明根据本公开的实例实施例的抓握加热端子的图49的端子夹爪的透视图;
图51说明根据本公开的实例实施例的抓握加热端子的图49的端子夹爪的放大侧视图;
图52说明根据本公开的实例实施例的图40的烟弹组装子系统的加热元件耦接子站的透视图;
图53说明根据本公开的实例实施例的图52的加热元件耦接子站的大体上连续的加热元件输入的卷轴;
图54说明根据本公开的实例实施例的图52的加热元件耦接子站的焊接部分的透视图;
图55说明根据本公开的实例实施例的在焊接期间图52的加热元件耦接子站的焊接部分的侧视图;
图56说明根据本公开的实例实施例的图40的烟弹组装子系统的液体输送元件弯曲子站;
图57说明根据本公开的实例实施例的具有接纳于其中的部分组装的烟弹的图56的液体输送元件弯曲子站;
图58说明根据本公开的实例实施例的图40的烟弹组装子系统的基座和芯线夹爪的透视图;
图59说明根据本公开的实例实施例的抓握部分组装的烟弹的图58的基座和芯线夹爪的侧视图;
图60说明根据本公开的实例实施例的图40的烟弹组装子系统的储集器耦接子站的大体上连续的储集器衬底输入的卷轴;
图61说明根据本公开的实例实施例的图60的储集器耦接子站的单一化单元的透视图;
图62说明根据本公开的实例实施例的图61的储集器耦接子站的单一化单元的替代透视图;
图63说明根据本公开的实例实施例的图40的烟弹组装子系统的储集器耦接子站的缠绕机构的透视图;
图64说明根据本公开的实例实施例的图40的烟弹组装子系统的外部主体耦接子站的俯视图;
图65说明根据本公开的实例实施例的图64的外部主体耦接子站的放大俯视图,具有经构造以在打开构造中穿过其中接纳部分组装的烟弹的工具;
图66说明根据本公开的实例实施例的图64的外部主体耦接子站的放大俯视图,具有经构造以在闭合构造中穿过其中接纳部分组装的烟弹的工具;
图67说明根据本公开的实例实施例的图64的外部主体耦接子站的储集器夹爪的分解视图;
图68说明根据本公开的实例实施例的处于组装构造中的图67的储集器夹爪;
图69说明根据本公开的实例实施例的包含指状物的图64的外部主体耦接子站的储集器夹爪的替代实施例;
图70说明根据本公开的实例实施例的通过引导导线穿过液体输送元件且围绕其缠绕导线而形成的加热元件的放大透视图;
图71示意性说明根据本公开的实例实施例的图3的烟弹填充子系统;
图72说明根据本公开的实例实施例的在填充期间以及在滴嘴与其耦接之前的部分组装的烟弹的俯视图;
图73说明根据本公开的实例实施例的在填充期间的烟弹;
图74说明根据本公开的实例实施例的图3的检查子系统的侧视相机,其经构造以检查端子从基座延伸的距离;
图75说明根据本公开的实例实施例的图3的检查子系统的端视相机,其经构造以检查端子的径向位置;
图76说明根据本公开的替代实施例的图3的检查子系统的侧视和端视相机,其经构造以检查端子高度和径向位置;
图77说明根据本公开的实施例的图3的检查子系统的固定装置的侧视图,其经构造以促进对端子的检查;
图78说明根据本公开的实例实施例的图3的检查子系统的侧视和端视相机,其经构造以检查烟弹的外部主体;
图79说明根据本公开的替代实例实施例的图3的检查子系统的侧视和端视相机,其经构造以检查烟弹的外部主体;
图80说明根据本公开的实例实施例的图3的检查子系统的吹通站的透视图;
图81说明根据本公开的替代实例实施例的图3的检查子系统的吹通站的透视图;
图82说明根据本公开的实例实施例的图3的检查子系统的压降站的透视图;
图83说明根据本公开的替代实例实施例的图3的检查子系统的压降站的透视图;
图84说明根据本公开的实例实施例的包含测试固定装置的图3的检查子系统的电测试站的透视图;
图85说明根据本公开的实例实施例的图84的测试固定装置的放大透视图;
图86说明根据本公开的实例实施例的穿过图84的测试固定装置的截面图;
图87说明根据本公开的替代实例实施例的包含测试固定装置的图3的检查子系统的电测试站的透视图;
图88示意性说明根据本公开的实例实施例的用于组装用于气溶胶递送装置的烟弹的方法;
图89示意性说明根据本公开的实例实施例的用于组装用于气溶胶递送装置的雾化器的方法;
图90示意性说明根据本公开的实例实施例的烟弹填充方法;
图91示意性说明根据本公开的实例实施例的用于组装用于气溶胶递送装置的烟弹的方法;以及
图92示意性说明根据本公开的实例实施例的控制器。
具体实施方式
现在将在下文参考本公开的示例性实施例来更充分地描述本公开。描述这些示例性实施例,使得本公开将是详尽且完整的,并且将本公开的范围完全传达给本领域的技术人员。实际上,本公开可以用许多不同形式体现并且不应被理解为限于本文中陈述的实施例;而是,提供这些实施例使得本公开将满足适用的法律要求。除非上下文另外清楚指示,否则如本说明书和所附权利要求书中所使用,单数形式“一”、“一个”、“所述”包含复数变化。
如下文描述,本公开的实施例涉及气溶胶递送装置以及用于其组装的方法和设备。根据本公开的气溶胶递送装置可以使用电能来加热材料(优选地无需在任何显著程度上使所述材料燃烧)以形成可吸入物质;这些制品最优选地充分紧凑而被视为“手持式”装置。气溶胶递送装置可以提供抽香烟、雪茄或烟斗的一些或所有的感觉(例如,吸入和吐出习惯、口味或气味的类型、感官效果、身体感觉、使用习惯、视觉提示(例如由可视气溶胶提供的那些提示)和类似物),而无需所述制品或装置的任何组份的任何实质程度的燃烧。在气溶胶得自烟草的燃烧或热解的副产物的意义上,气溶胶递送装置可能不会产生烟,而是,所述制品或装置可产生得自所述制品或装置的某些组份的挥发或汽化的蒸气(包含可以视为可视气溶胶的气溶胶内的蒸气,其可能被视为将描述为烟状的)。在高度优选的实施例中,气溶胶递送装置可以并入有烟草和/或得自烟草的组份。
本公开的气溶胶递送装置还可以表征为蒸气产生制品或药剂递送制品。因此,所述制品或装置可以经调适以便以可吸入形式或状态提供一种或多种物质(例如,调味剂和/或药物活性成分)。举例来说,可吸入物质可以大体上呈蒸气(即,在低于其临界点的温度下成气相的物质)的形式。替代地,可吸入物质可以呈气溶胶(即,细固体颗粒或液滴在气体中的悬浮液)的形式。为了简单,如本文使用的术语“气溶胶”有意包含呈适合于人吸入的形式或类型的蒸气、气体和气溶胶,无论是否可视且无论是否为可能视为烟状的形式。
在使用中,本公开的气溶胶递送装置可以经受一个人在使用传统类型的烟制品(例如,通过点燃和吸入烟草而采用的香烟、雪茄或烟斗)时采用的许多物理动作。举例来说,本公开的气溶胶递送装置的使用者可以保持所述制品,极类似于传统类型的烟制品,在所述制品的一端抽吸以吸入由所述制品产生的气溶胶,在选定的时间间隔喷烟等。
本公开的气溶胶递送装置大体上包含提供于外部主体或壳内的若干组件。外部主体或壳的总体设计可以变化,并且可界定气溶胶递送装置的总体大小和形状的外部主体的格式或构造可以变化。通常,与香烟或雪茄的形状类似的长形主体可以由单个单元式壳形成;或者所述长形主体可以由两个或更多个可分离的部件形成。举例来说,气溶胶递送装置可以包括长形壳或主体,其可为大体上管状的形状,且因此与常规香烟或雪茄的形状类似。在一个实施例中,气溶胶递送装置的所有组件包含于一个外部主体或壳内。替代地,气溶胶递送装置可以包括接合的并且可分离的两个或更多个壳。举例来说,气溶胶递送装置可以在一端拥有控制主体,所述控制主体包括含有一个或多个可再用组件(例如,用于控制所述制品的操作的可再充电电池和各种电子器件)的外部主体或壳,且在另一端拥有以可移除方式附接到其的外部主体或壳,所述外部主体或壳含有可抛弃的部分(例如,可抛弃的含有气味的烟弹)。鉴于本文提供的进一步公开,单个壳类型的单元内或者多件式可分离壳类型的单元内的组件的更特定格式、构造和布置将显而易见。另外,在考虑了市售的电子气溶胶递送装置(例如在本公开中上文列出的那些代表性产品)之后可以了解到各种气溶胶递送装置设计和组件布置。举例来说,包括多个外部主体和一个耦接器的气溶胶递送装置的实施例在bless等人在2014年2月3日申请的美国专利申请序列号14/170,838中描述,所述申请以全文引用的方式并入本文,如上所述。
本公开的气溶胶递送装置最优选地包括以下各者的某一组合:电源(即,电力源);至少一个控制组件(例如,用于(例如)通过控制从电源到所述制品的其它组件的电流流动而致动、控制、调节和停止用于热产生的电力的构件);加热器或热产生组件(例如,通常被称作“雾化器”的电阻加热元件或组件);以及气溶胶前驱体组合物(例如,通常是在施加了足够的热之后能够得到气溶胶的液体,例如通常被称作“烟油”、“电子液体”和“电子油”的成份);以及嘴端区或尖端,用于允许对气溶胶递送装置抽吸以吸入气溶胶(例如,穿过所述制品的经界定的气流路径,使得所产生的气溶胶在抽吸之后可以从中撤出)。
所述气溶胶递送装置内的组件的对准可以变化。在特定实施例中,气溶胶前驱体组合物可以位于制品的一端附近(例如,烟弹内,所述烟弹在某些情形中可以是可更换以及可抛弃的),所述端可以经构造以接近使用者的嘴定位以便最大化对使用者的气溶胶递送。然而,不排除其它构造。一般来说,加热元件可以被定位成足够接近所述气溶胶前驱体组合物,使得来自加热元件的热可以使气溶胶前驱体(以及可以同样地用于递送给使用者的一种或多种调味剂、药剂或类似者)挥发并且形成气溶胶以供递送给使用者。当加热元件对气溶胶前驱体组合物加热时,以适合于被消费者吸入的物理形式形成、释放或产生气溶胶。应注意,前述术语既定是可互换的,使得对释放、释放了、释放出或所释放的提及包括形成或产生、形成了或产生了、形成出或产生出以及所形成或所产生。具体来说,可吸入物质是以蒸气或气溶胶或其混合物的形式释放。另外,在考虑了市售的电子气溶胶递送装置(例如在本公开中上文列出的那些代表性产品)之后可以了解到对各种气溶胶递送装置组件的选择。
气溶胶递送装置并入有电池或其它电力源以提供足以向所述制品提供各种功能性(例如加热器的供电、控制系统的供电、指示器的供电以及类似者)的电流。所述电源可以呈现各种实施例。优选地,所述电源能够递送足够的电力以快速地加热所述加热元件以便形成气溶胶,并且通过在所需的持续时间内使用来对所述制品供电。所述电源优选地经设定大小以方便地配合在气溶胶递送装置内,使得可以容易地处置所述气溶胶递送装置;并且另外,优选电源是足够轻质的而不会有损合意的吸烟体验。
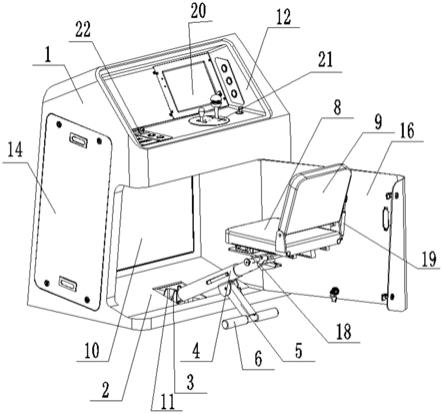
图1中说明气溶胶递送装置100的一个实例实施例。特定来说,图1说明包含烟弹200和控制主体300的气溶胶递送装置100的部分分解视图。烟弹200和控制主体300可以成功能关系永久地或可拆卸地对准。各种机构可以将烟弹200连接到控制主体300以得到螺纹接合、压入配合接合、干涉配合、磁性接合或类似者。在一些实施例中,当烟弹200和控制主体300处于组装构造时,气溶胶递送装置100可以是大体上杆状、大体上管状形状或大体上圆柱形形状。
在特定实施例中,烟弹200和控制主体300中的一者或两者可以被称为是可抛弃的或是可再用的。举例来说,控制主体300可以具有可更换的电池或可再充电的电池并且因此可以与任何类型的再充电技术结合,包含连接到典型交流电源插座、连接到车载充电器(即,点烟器插口)以及连接到计算机(例如通过通用串行总线(usb)电缆)。此外,在一些实施例中,烟弹200可以包括如2012年9月5日申请的美国专利申请序列号13/603,612中公开的一次性烟弹,所述申请以全文引用的方式并入本文。
图2说明根据本公开的实例实施例的气溶胶递送装置100的控制主体300的分解视图。如所说明,控制主体300可以包括耦接器302、外部主体304、密封部件306、粘结部件308(例如,
关于流量传感器310,包含用于气溶胶递送装置的各种微控制器、传感器和开关的代表性电流调节组件和其它电流控制组件描述于以下各者中:gerth等人的美国专利号4,735,217;全都是brooks等人的美国专利号4,922,901、4,947,874和4,947,875;mccafferty等人的美国专利号5,372,148;fleischhauer等人的美国专利号6,040,560;nguyen等人的美国专利号7,040,314;以及pan的美国专利号8,205,622,上述各案全部以全文引用的方式并入本文。还参考2013年3月15日申请的ampolini等人的美国申请序列号13/837,542中描述的控制方案,所述申请以全文引用的方式并入本文。
在一个实施例中,指示器318可以包括一个或多个发光二极管。指示器318可以通过连接器电路320与控制组件312通信,且例如在如流量传感器310检测使用者在耦接到耦接器302的烟弹上抽吸期间照亮。端盖322可以适于使在它下面的由指示器318提供的照亮可见。因此,指示器318可以在气溶胶递送装置100的使用期间照亮以模拟烟制品的点燃端。然而,在其它实施例中,指示器318可以不同的数目提供,并且可以呈现不同形状且甚至可为外部主体中的开口(例如用于当这些指示器存在时释放声音)。
在本公开的气溶胶递送装置中可以利用再另外的组件。举例来说,sprinkel等人的美国专利号5,154,192公开了用于烟制品的指示器;sprinkel,jr.的美国专利号5,261,424公开了压电式传感器,所述压电式传感器可以与装置的嘴端相关联以检测与抽吸相关联的使用者嘴唇活动且接着触发加热;mccafferty等人的美国专利号5,372,148公开了用于通过滴嘴响应于压力下降而控制进入加热负载阵列中的能量流的喷烟传感器;harris等人的美国专利号5,967,148公开了烟装置中的插口,所述插口包含检测所插入组件的红外线透射率的非均匀性的识别器以及在所述组件插入到所述插口中时执行检测例程的控制器;fleischhauer等人的美国专利号6,040,560描述了具有多个差动相位的经界定的可执行电力循环;watkins等人的美国专利号5,934,289公开了光子光导发光组件;counts等人的美国专利号5,954,979公开了用于更改通过烟装置的吸阻的构件;blake等人的美国专利号6,803,545公开了用于烟装置中的特定电池构造;griffen等人的美国专利号7,293,565公开了用于与烟装置一起使用的各种充电系统;fernando等人的美国专利号8,402,976公开了用于烟装置的用以方便充电并允许所述装置的计算机控制的计算机介接构件;fernando等人的美国专利申请公布号2010/0163063公开了用于烟装置的识别系统;以及flick的wo2010/003480公开了气溶胶产生系统中指示喷烟的流体流量感测系统;前述公开全部以全文引用的方式并入本文。与电子气溶胶递送制品相关并且公开可以用在本制品中的材料或组件的组件的另外实例包含gerth等人的美国专利号4,735,217;morgan等人的美国专利号5,249,586;higgins等人的美国专利号5,666,977;adams等人的美国专利号6,053,176;white的u.s.6,164,287;voges的美国专利号6,196,218;felter等人的美国专利号6,810,883;nichols的美国专利号6,854,461;hon的美国专利号7,832,410;kobayashi的美国专利号7,513,253;hamano的美国专利号7,896,006;shayan的美国专利号6,772,756;hon的美国专利号8,156,944和8,375,957;hon的美国专利申请公布号2006/0196518和2009/0188490;thorens等人的美国专利申请公布号2009/0272379;monsees等人的美国专利申请公布号2009/0260641和2009/0260642;oglesby等人的美国专利申请公布号2008/0149118和2010/0024834;wang的美国专利申请公布号2010/0307518;hon的wo2010/091593;foo的wo2013/089551;以及2013年3月15日申请的美国专利申请序列号13/841,233,以上各案中的每一者以全文引用的方式并入本文。前述文档公开的多种材料可以在各种实施例中并入到本发明的装置中,并且前述公开全部以全文引用的方式并入本文。
返回到图1,以分解构造说明烟弹200。如所说明,根据本公开的实例实施例,烟弹200可以包括基座装运插头202、基座204、控制组件端子206、电子控制组件208、流管210、雾化器212、储集器衬底214、外部主体216、标签218、滴嘴220以及滴嘴装运插头222。基座204可以耦接到外部主体216的第一末端,且滴嘴220可以耦接到外部主体的相对第二末端以在其中封闭烟弹200的其余组件。基座204可经构造以接合控制主体300的耦接器302。在一些实施例中,基座204可以包括大体上防止烟弹与控制主体之间的相对旋转的抗旋转特征,如2013年3月15日申请的美国专利申请序列号13/840,264中所公开,所述专利以全文引用的方式并入本文。
基座装运插头202可经构造以在烟弹200的使用之前接合且保护基座204。类似地,滴嘴装运插头222可经构造以在烟弹200的使用之前接合且保护滴嘴220。控制组件端子206、电子控制组件208、流管210、雾化器212以及储集器衬底214可以保持在外部主体216内。标签218可以至少部分地围绕外部主体216,且在其上包含例如产品识别符等信息。
雾化器212可以包括第一加热端子234a和第二加热端子234b、液体输送元件238以及加热元件240。在此方面,储集器衬底214可经构造以保持气溶胶前驱体组合物。也称为蒸气前驱体组合物的气溶胶前驱体组合物可以包括多种组份,包含(例如)多元醇(例如,甘油、丙二醇或其混合物)、尼古丁、烟草、烟草提取物和/或调味剂。可以包含在气溶胶前驱体组合物中的各种组份描述于robinson等人的美国专利号7,726,320中,所述专利以全文引用的方式并入本文。额外的代表性类型的气溶胶前驱体组合物陈述于以下各者中:sensabaugh,jr.等人的美国专利号4,793,365;jakob等人的美国专利号5,101,839;biggs等人的pctwo98/57556;以及《对加热而非燃烧烟草的新香烟原型的化学和生物研究(chemicalandbiologicalstudiesonnewcigaretteprototypesthatheatinsteadofburntobacco)》(r.j.雷诺兹烟草公司专论(1988));上述各案的公开内容以全文引用的方式并入本文。在本公开的气溶胶递送装置中可采用的其它气溶胶前驱体包含以下产品中包含的气溶胶前驱体:r.j.reynoldsvaporcompany的
储集器衬底214可以包括形成为管的形状的非机织纤维的多个层,所述层环绕烟弹200的外部主体216的内部。因此,液体组份例如可以由储集器衬底214以吸附方式保持。储集器衬底214与液体输送元件238成流体连接。因此,液体输送元件238可经构造以经由毛细管作用将液体从储集器衬底214输送到加热元件240。
如所说明,液体输送元件238可以与加热元件240成直接接触。如图1中进一步说明,加热元件240可以包括界定卷绕在液体输送元件238周围的多个线圈的导线。在一些实施例中,通过围绕液体输送元件238卷绕导线可以形成加热元件240,如2012年12月7日申请的美国专利申请序列号13/708,381中描述,所述申请以全文引用的方式并入本文。此外,在一些实施例中,所述导线可以界定可变的线圈间距,如2013年3月14日申请的美国专利申请序列号13/827,994中描述,所述申请以全文引用的方式并入本文。可以采用经构造以在施加电流通过时产生热的材料的各种实施例来形成加热元件240。可以用来形成导线线圈的实例材料包含坝塔尔合金(fecral)、镍铬合金、二硅化钼(mosi2)、硅化钼(mosi)、掺铝二硅化钼(mo(si,al)2)、石墨和石墨基材料;以及陶瓷(例如,正或负温度系数陶瓷)。
然而,可以采用方法的各种其它实施例来形成加热元件240,且在雾化器212中可以采用加热元件的各种其它实施例。举例来说,压印加热元件可以用于雾化器中,如2013年3月15日申请的美国专利申请号13/842,125中描述,所述申请以全文引用的方式并入本文。更进一步说,额外代表性加热元件以及用于其中的材料描述于以下各案中:counts等人的美国专利号5,060,671;deevi等人的美国专利号5,093,894;deevi等人的美国专利号5,224,498;sprinkeljr.等人的美国专利号5,228,460;deevi等人的美国专利号5,322,075;deevi等人的美国专利号5,353,813;deevi等人的美国专利号5,468,936;das的美国专利号5,498,850;das的美国专利号5,659,656;deevi等人的美国专利号5,498,855;hajaligol的美国专利号5,530,225;hajaligol的美国专利号5,665,262;das等人的美国专利号5,573,692;以及fleischhauer等人的美国专利号5,591,368,上述各案的公开内容以全文引用的方式并入本文。此外,在其它实施例中可以采用化学加热。加热器和用以形成加热器的材料的各种额外实例描述于2012年9月4日申请的美国专利申请序列号13/602,871中,所述申请以引用的方式并入本文,如上所述。
在本气溶胶递送装置中可以使用多种加热器组件。在各种实施例中,可以使用一个或多个微型加热器或类似的固态加热器。本文进一步描述可以利用的微型加热器的实施例。另外的微型加热器以及并入有适合于在当前公开的装置中使用的微型加热器的雾化器描述于2012年9月4日申请的美国专利申请序列号13/602,871中,所述申请以全文引用的方式并入本文。
在加热元件240的相对末端处的第一加热端子234a和第二加热端子234b(例如,正端子和负端子)经构造以在烟弹200与其连接时与控制主体300形成电连接。此外,当控制主体300耦接到烟弹200时,电子控制组件208可以通过控制组件端子206与控制主体形成电连接。控制主体300因此可采用电子控制组件208来确定烟弹200是否为正版和/或执行其它功能。此外,电子控制组件和由此执行的功能的各种实例描述于2012年10月8日申请的美国专利申请序列号13/647,000中,所述申请以全文引用的方式并入本文。
在使用期间,使用者可以在气溶胶递送装置100的烟弹200的滴嘴220上抽吸。这可以将空气拉动通过控制主体300中或烟弹中的开口。举例来说,在一个实施例中,开口可以界定于耦接器302与控制主体300的外部主体304之间,如2013年3月15日申请的美国专利申请序列号13/841,233中描述,所述申请以全文引用的方式并入本文。然而,在其它实施例中可以通过气溶胶递送装置100的其它部分接收空气流。如上所述,在一些实施例中,烟弹200可以包含流管210。流管210可经构造以将从控制主体300接收的空气流引导到雾化器212的加热元件240。
气溶胶递送装置100中的传感器(例如,控制主体300中的喷烟或流量传感器)可以感测喷烟。当感测到喷烟时,控制主体300可以通过包含第一加热端子234a和第二加热端子234b的电路将电流引导到加热元件240。因此,加热元件240可以使通过液体输送元件238从储集器衬底214引导到雾化区的气溶胶前驱体组合物汽化。因此,滴嘴220可以允许空气和夹带的蒸气(即,呈可吸入形式的气溶胶前驱体组合物的组份)从烟弹200传递到在其上抽吸的消费者。
关于烟弹200中可以包含的组件的各种其它细节例如提供于2013年3月15日申请的美国专利申请序列号13/840,264中,所述申请以全文引用的方式并入本文。在此方面,其图7说明基座和控制组件端子的放大分解视图;其图8说明处于组装构造中的基座和控制组件端子的放大透视图;其图9说明处于组装构造中的基座、控制组件端子、电子控制组件和雾化器的加热端子的放大透视图;其图10说明处于组装构造中的基座、雾化器和控制组件的放大透视图;其图11说明其图10的组合件的相反透视图;其图12说明处于组装构造中的基座、雾化器、流管和储集器衬底的放大透视图;其图13说明处于组装构造中的基座和外部主体的透视图;其图14说明处于组装构造中的烟弹的透视图;其图15说明其图14的烟弹和用于控制主体的耦接器的第一部分透视图;其图16说明其图14的烟弹和其图11的耦接器的相反的第二部分透视图;其图17说明包含具有抗旋转机构的基座的烟弹的透视图;其图18说明包含具有抗旋转机构的耦接器的控制主体的透视图;其图19说明图17的烟弹与图18的控制主体的对准;其图3说明包括其图17的烟弹和其图18的控制主体的气溶胶递送装置,以及穿过气溶胶递送装置的经修改视图,说明烟弹的抗旋转机构与连接器主体的抗旋转机构的接合;其图4说明具有抗旋转机构的基座的透视图;其图5说明具有抗旋转机构的耦接器的透视图;且其图6说明穿过处于接合构造中的其图4的基座和其图5的耦接器的截面图。
根据本公开的气溶胶递送装置的各种组件可以从现有技术中描述的组件和市售组件选择。例如参考sebastian等人的美国专利申请公布号2014/0000638中公开的用于电子烟制品中的多种可雾化材料的可控递送的储集器和加热器系统,所述申请以全文引用的方式并入本文。
进一步注意,图1中说明的烟弹200的一些部分是任选的。在此方面,举例来说,在一些实施例中,烟弹200可以不包含流管210、控制组件端子206,和/或电子控制组件208。
在另一实施例中,大体上整个烟弹可以由一种或多种碳材料形成,这可以在生物降解能力和消除导线方面提供优点。在此方面,加热元件可以包括碳泡沫,储集器可以包括碳化织物,且可采用石墨来形成与电池和控制器的电连接。griffith等人的美国专利申请公布号2013/0255702中提供了基于碳的烟弹的实例实施例,所述申请以全文引用的方式并入本文。
如上文所述,气溶胶递送装置的烟弹可以包含许多组件。所述组件中的一些可能相对小和/或相对精巧。因此,可能需要精密制造技术来形成气溶胶递送装置。在此方面,传统上已经经由手动组装来形成气溶胶递送装置。然而,使用人力来组装气溶胶递送装置遭受某些损害。在此方面,经由人力制造的气溶胶递送装置的质量的良好程度仅仅如同执行劳动的工人那样。此外,即使熟练的工人也可能有时候出错。另外,人力可能相对昂贵。因此,由于与经由人力制造气溶胶递送装置相关联的这些问题和其它问题,可能希望以自动化方式制造气溶胶递送装置。因此,下文论述用于气溶胶递送装置的烟弹的自动化制造,其可以提供增强的可重复性、较低的成本和/或避免上述其它问题。
在此方面,图3示意性说明用于制造用于气溶胶递送装置(例如,上述气溶胶递送装置100)的烟弹(例如,上述烟弹200)的系统400的实施例。应注意,上述气溶胶递送装置100是借助于实例而提供。在此方面,可以采用本文描述的方法、系统和设备来形成在一个或多个方面与上述烟弹不同的烟弹的各种实施例。
如所说明,系统400可以包含在成品烟弹200的形成中执行特定功能的各种子系统。应注意,虽然将所述子系统说明为彼此分离,但所述子系统可以重叠。举例来说,在一些实施例中,常见设备可以执行两个或更多个功能(例如,组装和填充或封盖和加标签等),而非通过单独设备执行特定功能。
此外,各种子系统及其部分是单独可用的。在此方面,虽然本文将子系统及其部分大体上描述为可一起使用,但这是借助于实例来描述。因此,本文描述的子系统或其部分中的任一者可以本身可用,或者可与本文描述的其它子系统及其部分中的一些或全部以任何组合来使用。因此,举例来说,虽然下文将烟弹填充子系统的实例实施例描述为用以填充通过本文公开的烟弹组装子系统的实施例填充的烟弹,但所述烟弹填充子系统可用以填充通过其它子系统形成的烟弹和/或通过烟弹组装子系统组装的烟弹可以由其它烟弹填充子系统填充。此外,虽然下文公开所述子系统的部分的特定实施例,但这些实施例仅是出于实例目的而提供。因此,在一些实施例中,所述子系统可以包含更少的或额外的部分。因此,每一子系统的每一部分以及总体系统的每一部分并非在所有实施例中都需要。
如所说明,所述子系统可以包含烟弹组装子系统402,其经构造以从组件406(例如,基座204、加热端子234a、234b等)形成未填充的烟弹404。烟弹填充子系统408可以填充未填充的烟弹404以产生经填充的烟弹410。烟弹封盖子系统412可以封盖经填充的烟弹410以产生经封盖的烟弹414。烟弹加标签子系统416可以将标签施加到经封盖的烟弹414以完成成品烟弹200。
系统400可以另外包含检查子系统418。检查子系统418可以检查组件406、未填充的烟弹404、经填充的烟弹410、经封盖的烟弹414和/或成品烟弹200。此外,在一些实施例中,可以在烟弹组装子系统402、烟弹填充子系统408、烟弹封盖子系统412和烟弹加标签子系统416中的一者或多者处的中间完成状态下检查烟弹。因此,可以在烟弹的完成之前、期间和之后检查烟弹200及其组件。
系统可进一步包含至少一个控制器417。控制器417可经构造以控制烟弹组装子系统402、烟弹填充子系统408、烟弹封盖子系统412和/或烟弹加标签子系统416。在此方面,除了另外引导本文描述的操作之外,控制器可经构造以接收来自本文描述的传感器中的一者或多者的数据且基于其而输出指令。
应注意,系统400的一些或者全部可以自动化。在此方面,如下文描述,在系统400的一些实施例中可以采用机器人设备。机器人设备可以从各种机器人制造商提供,包含(借助于实例)加利福尼亚州长滩的densorobotics、密歇根州罗切斯特山的fanuc、伊利诺伊州弗农山的mitsubishielectricautomation以及德国慕尼黑的siemensautomationtechnology。
图4中说明烟弹组装子系统402的实例实施例。应注意,子站及其位置的特定实施例可以与下文描述和图4中说明的那些实施例不同。此外,采用的特定操作以及其次序也可以变化。在此方面,用以组装烟弹的设备可以取决于最终产品烟弹的特定构造。在此方面,上文描述且下文参考的烟弹200是仅出于实例目的而论述。另外,虽然描述将烟弹组装子系统402的部分大体上称为子站,但应理解,本文论述的各种组装操作可以由单个装置、设备或子站执行,或者在多个装置、设备和子站之间分配。因此,下文提供的描述是仅用于实例目的,且采用的设备和操作及其次序可以变化而不脱离本公开的范围。此外,应理解,各种子站和在每一个子站处执行的操作应当视为个别发明性方面。在此方面,虽然本文将个别子站和操作大体上描述为系统的部分,但每一子站可以独立于本文论述的其它子站而操作和/或与其它子站组合。
举例来说,烟弹组装子系统402可以包含基座加载子站502、端子耦接子站504、端子密封子站506、控制组件耦接子站508、流管耦接子站510、加热元件耦接子站512、液体输送元件弯曲子站514、储集器耦接子站516,以及外部主体耦接子站518。如所说明,控制器417可经构造以控制烟弹组装子系统402的子站502到518中的一者或多者。简要来说,基座加载子站502可经构造以接纳基座(例如,基座204)且定向所述基座以与烟弹的各种其它组件组装。端子耦接子站504可经构造以将一个或多个端子(例如,第一加热端子234a和第二加热端子234b以及控制组件端子206)耦接到基座。端子密封子站506可经构造以相对于基座密封端子中的一者或多者,以防止基座与端子之间的流体流入或流出。控制组件耦接子站508可经构造以将控制组件(例如,电子控制组件208)耦接到控制组件端子。流管耦接子站510可经构造以将流管(例如,流管210)耦接到控制组件、第一和第二加热端子和/或其它组件。加热元件耦接子站512可经构造以将加热元件(例如,加热元件240)耦接到加热端子。液体输送元件弯曲站514可经构造以围绕加热端子弯曲液体输送元件(例如,液体输送元件238)。储集器耦接子站516可经构造以将储集器衬底(例如,储集器衬底214)耦接到液体输送元件。此外,外部主体耦接子站518可经构造以将外部主体(例如,外部主体216)耦接到基座。
烟弹组装子系统402可以多种方式组装烟弹(例如,烟弹200)。举例来说,在一个实施例中,可以大体上从基座向上组装烟弹。换句话说,可以将组件插入或另外耦接到基座以从基座建置烟弹。
在此方面,如图5和6中说明,在一个实施例中,输送系统可以包含托架600,其也可以称为“荚舱”或“巢”,其可用以组装烟弹200。图5说明空的托架600,而图6说明在基座204加载于其中之后的托架。如所说明,托架600可以包含夹持机构602。夹持机构602可以包含可位移的活塞604,所述活塞在其一端处界定头部606。偏置机构可以使可位移的活塞604朝向凹槽608偏置。因此,如图6中说明,可位移的活塞604的头部606可以与凹槽608协作以在其中保持基座204。在此方面,凹槽608可以为v形的,以便使基座204在凹槽中位于中心。
可以采用偏置机构的各种实施例,例如磁体、液压或气压缸等。然而,在说明的实施例中,杆610可以接纳于支座612中。也可用以使活塞604相对于凹槽608对准的支座612可以在其中包含弹簧,所述弹簧使杆610朝向活塞的头部606偏置。因此,活塞604的头部606可以朝向凹槽608偏置以在其中保持基座204。此外,活塞604可以在其与头部606相对的一端处包含把手614。把手614可经构造以允许经由自动化或手动方法对其的抓握,以抵抗由偏置机构提供的力,从而释放基座204。
输送系统可以进一步包括轨道616或其它机构,其经构造以提供托架在多个子站之间的移动。托架600可以使用轮618(参见例如图5)安装到轨道616。通过驱动轮618,可以沿着轨道616移动托架600。替代地,可以采用磁性推进来移动托架600。然而,仍可以提供轮618以便将托架保持于轨道616上。在此方面,如图7和8中说明,磁轨620可以致使托架600移动。更特定来说,托架600可以进一步包括磁体622。磁轨620可以与耦接到托架600的磁体622的位置相关地改变极性,使得磁轨620与磁体之间的吸引力和/或排斥力致使托架移动。因此,托架600可以在各种子站之间转移。在此方面,可以提供多个托架600。托架600可经构造以在下文描述的各种子站之间移动。在此方面,托架600可以在烟弹的组装期间沿着由轨道界定的路径安置于各种位置,使得在任何给定时间,托架可以沿着轨道的长度分布。进而,可以同时构造多个烟弹。
可能合意的是在进行一个或多个操作的同时在一个或多个子站处停止或减慢托架600的移动,以便简化烟弹到基座的耦接部分。此外,在一些实施例中,可能合意的是将托架600锁定于预定义位置中以大体上防止托架在一个或多个子站处的移动。在此方面,托架的位置的磁性锁定可能不足以将托架恰当地锁定在适当位置,因为磁性锁定可能仍允许托架的某种移动。因此,可以采用锁定设备来临时约束每一托架600沿着轨道616的移动。
锁定设备可以包含耦接到每一托架600的定位器机构624。在说明的实施例中,定位器机构624包括第一和第二栓柱626。此外,锁定设备可以包括接合机构628,其可以定位于需要将托架600锁定于适当位置的每一位置处。因此,接合机构628可以定位于相对于轨道616的纵向长度的固定位置处。然而,接合机构628可经构造以移动为接触定位器机构624(例如,经由气动活塞、液压活塞或线性电动机)以将托架600锁定于适当位置。
在说明的实施例中,接合机构628包括圆柱体630。因此,在向上引导接合机构628时,圆柱体630可以接触定位器机构624的栓柱626中的一者或两者。进而,栓柱626可以从圆柱体630偏转,使得定位器机构624相对于接合机构628变为位于中心。此外,在一个实施例中,圆柱体630可以包括辊或轮,其经构造以旋转而通过允许所述圆柱体在被带入与栓柱中的一者接触时旋转而不是抵靠其刮擦,来促进栓柱626之间的定中心。无论圆柱体630是否旋转,都可以通过由定位器机构624的栓柱626与接合机构628的圆柱体之间的交互产生的定中心作用来解决托架600的初始停止点的任何不精确。因此,通过固定接合机构628与耦接到托架的定位器机构624之间的交互可以约束托架600沿着轨道616的移动。
应注意,锁定设备可以包括经构造以使托架相对于接合机构位于中心的各种其它机构。举例来说,定位器机构可以包括垂直定向的凹槽。替代地或另外,接合机构可以包括例如三角撑等成角度部件。
因此,可以采用托架600将基座204输送到各种组件与其进行组装的各种子站。进而,如图6和8中说明可在基座加载子站502处将基座204加载到托架600中。随后,可以与基座204组装其它组件(例如,通过将组件向下引导成与基座接触)来组装烟弹。
在此方面,如上文所述,可以在端子耦接子站504处将控制组件端子206以及第一加热端子234a和第二加热端子234b插入到基座204中。在一些实施例中,可以从大体上连续的输入来提供第一加热端子234a、第二加热端子234b和/或控制组件端子206。更特定来说,可以从大体上连续的第一加热端子输入来供应第一加热端子234a,可以从大体上连续的第二加热端子输入来供应第二加热端子234b,和/或可以从大体上连续的控制组件端子输入来供应控制组件端子206。应注意,如本文关于某些指定输入使用的术语“大体上连续”指代其中所参考的输入界定互连底层组件的条带、链或其它分组以使得个别组件可以从其中单个分出的构造。
举例来说,图9说明包括多个第一加热端子234a的大体上连续的第一加热端子输入700。在此方面,第一加热端子234a中的每一者连接到大体上连续的载体702。在说明的实施例中,第一加热端子234a中的每一者通过第一和第二耦接器704连接到载体702。然而,在其它实施例中,可以采用单个耦接器或额外耦接器来将第一加热端子234a保持到载体702。在一些实施例中,如所说明,第一加热端子234a、耦接器704以及载体702可以一体式形成(例如,由金属片条带形成)。
可以切割耦接器704以从大体上连续的第一加热端子输入700释放个别的第一加热端子234a。此外,载体702可以包括孔口706、凹槽、切口或其它机构,其经构造以促进大体上连续的第一加热端子输入700的移动,使得可以从其移除个别的第一加热端子234a。在此方面,如图9中说明,轮708可以包含经构造以接合孔口706的突出部710,使得轮708的旋转造成输入700朝向将从其移除个别第一加热端子234a的位置的移动。应注意,虽然上文提供的描述是在第一加热端子234a方面来提供,但在一些实施例中,可以类似方式经由大体上连续的输入来供应第二加热器端子234b和/或控制组件端子206。
在插入到基座204中之后,端子密封子站506可以在一些实施例中相对于基座密封端子206、234a、234b中的一者或多者,以便防止液体经过端子流入或流出。然而,在一些实施例中,可以仅密封加热端子234a、234b。举例来说,在说明的实施例中,控制组件端子206可以延伸通过穿过基座204的开口或者邻近于所述开口而定位,在烟弹的使用期间用户通过烟弹200抽吸的空气通过所述开口。因此,控制组件端子206可以不相对于基座204密封,以便防止堵塞延伸穿过基座的开口。此外,控制组件端子206可以不接触填充有液体的储集器衬底214,使得经过控制组件端子206流出的液体不会成问题。
图10说明端子密封子站506的实例实施例。端子密封子站506可以包含一个或多个密封剂施配器802a、802b。在说明的实施例中,采用第一密封剂施配器802a和第二密封剂施配器802b以将由泵804提供的密封剂施配通过一个或多个导管806。机器人臂808可以用夹爪810抓住基座204。在此方面,机器人臂808可以定位基座204以使得基座定位于密封剂施配器802a、802b的喷嘴812a、812b前方。举例来说,夹爪810可以抓住基座204的外表面且从托架600移除基座204。随后,机器人臂808可以定位基座204以使得端子206、234a、234b在接近于密封剂施配器802a、802b的位置中大体上向上延伸。通过以此方式抓住基座204的外部,机器人臂808的夹爪810不会干扰施配密封剂,因为夹爪不会定位于喷嘴812a、812b与从基座向上延伸的端子206、234a、234b之间。
如图11中说明,密封剂施配器802a、802b可以经定位以使得喷嘴812a、812b至少部分地指向彼此。进而,机器人臂808可以将基座204和端子206、234a、234b定位于密封剂施配器802a、802b之间以使得喷嘴812a、812b可以在端子的相对侧处引导密封剂。举例来说,密封剂的液滴可以从喷嘴812a、812b朝向加热端子234a、234b的相对侧喷出。更特定来说,喷嘴812a、812b可以在加热端子234a、234b与基座204之间的接口处引导密封剂的液滴。
在一些实施例中,密封剂可以包括热熔融粘合剂,包括聚烯烃,包含无规聚α-烯烃、聚氨酯、乙烯-醋酸乙烯酯(eva)、茂金属聚α-烯烃、嵌段共聚物和/或聚酰胺。因此,端子密封子站506可进一步包括可使密封剂熔融的加热器814(参见图10)。此外,导管806可以被加热和/或隔热。泵804和密封剂施配器802a、802b中的密封件可以传统地采用
在液体密封剂的液滴接触加热端子234a、234b和/或基座204之后,所述液滴可以在适当位置中相对快速地干燥。此外,液滴可以不彼此接触。因此,加热端子234a、234b与基座204的完整接口周围的完整密封件可以不通过密封剂的液滴的初始施加而形成。因此,端子密封子站506可以进一步包括再熔融装置,例如热空气枪816,其经构造以在密封剂的施加之后将密封剂处的加热空气流引导到加热端子234a、234b和/或基座204。因此,来自热空气枪816的热空气可以使密封剂再熔融且围绕加热端子234a、234b吹送熔融密封剂,使得加热端子与基座204之间的接口围绕每一个加热端子的周边完全密封。在此方面,热空气枪816可以相对于基座204和加热端子234a、234b移动。在一些实施例中,热空气枪816可经构造以移动。然而,如所说明,在另一实施例中,热空气枪816可为静止的。因此,机器人臂804可以使基座204相对于热空气枪816移动,使得热空气使密封剂再熔融且在加热端子234a、234b与基座之间的接口周围引导密封剂。因此,密封剂可以重新固化且密封加热端子234a、234b与基座204之间的任何间隙。
应注意,端子密封子站506可以另外或替代地相对于基座204密封控制组件端子206和/或烟弹200的任何其它组件。另外,虽然上文将再熔融装置描述为热空气枪816,但在其它实施例中,可以通过其它方法和其它再熔融装置来使密封剂再熔融,例如通过以超声振动装置施加超声振动和/或以辐射加热器施加辐射热。此外,虽然上文将密封剂描述为热熔融粘合剂,但可采用密封剂的各种其它实施例。举例来说,密封剂可以包括环氧树脂或电灌封材料。在密封加热端子234a、234b之后,机器人臂608可以使基座204返回到托架600。
随后,控制组件耦接子站508可以将电子控制组件208耦接到控制组件端子206(例如,通过将控制组件垂直插入到由控制组件端子界定的狭槽中)。接着,流管耦接子站510可以将流管210耦接到部分组装的烟弹。举例来说,流管210可以水平插入,使得加热端子234a、234b稍微展开且接着在流管中界定的纵向凹槽中搭扣到适当位置中,其中流管中的水平狭槽接合电子控制组件208的顶部。
接下来,可以将部分组装的烟弹输送到加热元件耦接子站512,在此可将加热元件240耦接到加热端子234a、234b。在此方面,图12说明加热元件耦接子站512的实例实施例。在说明的实施例中,加热元件耦接子站512包含准备部分902、焊接部分904以及输送设备905,所述输送设备经构造以将缠绕在液体输送元件238周围的个别加热元件240从准备部分902输送到焊接部分904。
如图13中说明,在一些实施例中,可以从大体上连续的加热元件输入906供应加热元件和液体输送元件。在此方面,大体上连续的加热元件输入906可以包括卷绕在液体输送元件238周围的多个加热元件240。卷绕在液体输送元件周围的加热元件的实例在2013年3月14日申请的美国专利申请序列号13/827,994和2012年12月7日申请的13/708,381中提供,以上申请以全文引用的方式并入本文。
如所说明,在一些实施例中,可以从卷轴908供应大体上连续的加热元件输入906。卷轴908可以在大体上连续的加热元件输入906从其拉动时被动地旋转。替代地,卷轴908可以主动地旋转(例如,通过电动机),使得卷轴在大体上连续的加热元件输入906从其拉动时旋转。通过主动地旋转卷轴908或者被动地允许卷轴在大体上连续的加热元件输入906从其拉动时大体上自由地旋转,可以控制大体上连续的加热元件输入中的张力。在此方面,将过多的张力施加于大体上连续的加热元件输入906可能损坏加热元件240或液体输送元件238。举例来说,可以更改加热元件240的线圈的间距,这可能使得难以将加热元件附接到加热端子。此外,液体输送元件238中的过多张力可以造成其断裂,或者液体输送元件的拉伸可以减小其直径且影响液体输送元件将气溶胶前驱体组合物牵拉到加热元件240的能力。因此,可以通过控制其中的张力而将大体上连续的加热元件输入906供应到准备部分902而不损坏加热元件240或液体输送元件238。
图14说明加热元件耦接子站512的准备部分902的放大视图。简要来说,加热元件耦接子站512的准备部分902可经构造以准备个别加热元件240,其耦接到个别液体输送元件238以用于在加热元件的焊接部分904处焊接(参见例如耦接子站512)。在此方面,加热元件耦接子站512的准备部分902可经构造以单个分出一个加热元件240和一个液体输送元件238,使得随后可将加热元件耦接到加热端子。在此方面,在一个实施例中,可以准备好附接到加热端子而不对其执行额外操作的形式将个别加热元件和液体输送元件递送到准备部分。
然而,如上文所述,在说明的实施例中,大体上连续的加热元件输入906可以包含缠绕在大体上连续的液体输送元件周围的导线线圈。进而,可以切割大体上连续的加热元件输入906以从其移除个体加热元件240和液体输送元件238。在此方面,如所说明,加热元件耦接子站512的准备部分902可以包含施配器910、切割器912以及成像装置914(例如,相机)。
图15示意性说明加热元件耦接子站512的准备部分902。施配器910可经构造以从卷轴908施配某一长度的大体上连续的加热元件输入906(参见图13)。在此方面,施配器910可以包括静止部分916和可移动部分918。可移动部分918可以包含夹具920,其经构造以接近于大体上连续的加热元件输入906的一端抓住所述大体上连续的加热元件输入906。可移动部分918可经构造以在方向922上相对于静止部分916移动,使得从卷轴908施配大体上连续的加热元件输入906(参见图13)。举例来说,在一些实施例中,施配器910可以包括液压或气压缸或者线性电动机。施配器910可经构造以拉动大体上连续的加热元件输入906,直到已施配其所需的长度为止。
在此方面,成像装置914可经定位和构造以在施配大体上连续的加热元件输入906时捕捉大体上连续的加热元件输入906的图像。控制器417(参见例如图3)可以与成像装置914通信且经构造以分析由成像装置捕捉的图像。因此,控制器417可经构造以分析由相机914捕捉的图像以识别大体上连续的加热元件输入906的位置以确定其施配长度。
在此方面,施配器910可经构造以开始施配大体上连续的加热元件输入906,且控制器417可以分析其图像且在已经施配大体上连续的加热元件输入的所需长度时引导施配器停止施配大体上连续的加热元件输入。举例来说,控制器417可经构造以分析由成像装置914捕捉的图像以检测加热元件240的线圈或其它特征。借助于进一步实例,在一个实施例中,控制器417可经构造以检测加热元件240的经构造以接合加热端子的第一接触部分926和第二接触部分928。在一个实施例中,控制器417可以确定加热元件240的接触部分926、928的内部边缘926a、928a的位置。进而,控制器417可以计算加热元件240的接触部分926、928之间的中点,且允许施配器910继续施配大体上连续的加热元件输入906,直到第一接触部分926与第二接触部分928之间的中点与成像装置914的中点对准为止。
此时,控制器417可以引导施配器910停止施配大体上连续的加热元件输入906。另外,控制器417可以引导输送设备905抓住大体上连续的加热元件输入906。举例来说,输送设备905可以包括夹具930,其包含第一臂932a和第二臂932b,所述臂经构造以在加热元件240的接触部分926、928的外部抓住大体上连续的加热元件输入906,这可以允许所述夹具在焊接期间持续地保持加热元件,如下文论述。
此外,控制器417可以引导可包括第一刀片934a和第二刀片934b的切割器912切割大体上连续的加热元件输入906,从而单个分出具有所需长度的加热元件240和液体输送元件238。在此方面,成像装置914可经定位以使得当加热元件240的第一接触部分926与第二接触部分928之间的中点与成像装置的中点对准时,由夹具920保持的大体上连续的加热元件输入906的一端与切割器912的刀片934a、934b之间的距离等于单个加热元件240和液体输送元件238的所需长度。
应注意,加热元件耦接子站512的准备部分902可以进一步包括管936。大体上连续的加热元件输入906可以通过管936供应到切割器912。因此,在切割大体上连续的加热元件输入906之后,管936可以接近于大体上连续的加热元件输入的新的一端而支撑大体上连续的加热元件输入。进而,输送设备905的夹持机构910可以从单个分出的加热元件240和液体输送元件238释放且抓住大体上连续的加热元件输入906的新的末端,使得加热元件耦接子站512的准备部分902可以重复上述操作,如图16中说明。
如图16中进一步说明,在单个分出加热元件240和液体输送元件238之后,输送设备905可以将加热元件和液体输送元件引导到焊接部分904(参见例如图17)。在此方面,输送设备905可以包括机器人臂938,其经构造以在加热元件耦接子站512的准备部分902与焊接部分904之间移动夹具930。因此,输送设备905的夹具930可以在准备部分902处抓住加热元件240和液体输送元件238,且在输送到焊接部分904时持续保持加热元件和液体输送元件。
图17说明加热元件耦接子站512的焊接部分904。如所说明,焊接部分904可以包含激光器940、成像装置942(例如,相机)、端子固定机构944以及气体施配器946。简要来说,激光器940可经构造以产生激光束以将加热元件240焊接到加热端子。成像装置942可经构造以捕捉加热元件240和加热端子的图像。端子固定机构944可经构造以在焊接期间抓住第一加热端子和第二加热端子。气体施配器946可经构造以施配惰性气体(例如,氩气)以改善所得的焊接(例如,通过防止其氧化)。
应注意,虽然本文将加热元件描述为经由激光焊接而附接到加热端子,但可采用各种其它类型的焊接,例如电弧焊接、金属惰性气体焊接(mig)、钨惰性气体焊接(tig)、等离子焊接等。更广泛来说,加热元件可以经由其它方法附接到加热端子,例如软焊和机械连接。因此,应理解,可以采用耦接方法和相关设备的各种其它实施例而不脱离本公开的范围。
如上文所述,托架600可以沿着轨道616行进到各种子站。在此方面,如图17中进一步说明,在一些实施例中,轨道616和磁轨620可以延伸到加热元件耦接子站512的焊接部分904且经过所述焊接部分。因此,托架可以将已耦接加热端子的基座递送到加热元件耦接子站512的焊接部分904。举例来说,如上文所述,当托架到达加热元件耦接子站512的焊接部分904时,加热端子、控制组件端子、控制组件以及流管可以组装到基座。
然而,为了促进将加热端子焊接到加热元件,以所需构造对准加热端子可为合意的。在此方面,如图18中说明,端子固定机构944可以包括第一协作部分948a和第二协作部分948b。端子固定机构944的协作部分948a、948b可经构造以抓住第一加热端子和第二加热端子以使得其第一加热端子突片和第二加热端子突片大体上共面。替代地或另外,端子固定机构944的协作部分948a、948b可经构造以调整第一加热端子与第二加热端子之间的间距。如所说明,端子固定机构944的协作部分948a、948b可以分别界定经构造以在其中接纳加热端子的凹槽950。
图19到21示意性说明端子固定机构944的操作。图19说明处于初始分离构造中的端子固定机构944的协作部分948a、948b。所述初始分离构造可以允许加热端子234a、234b接纳于其协作部分948a、948b之间。随后,如图20中说明,协作部分948a、948b中的一者或两者可以移动以使得协作部分朝向彼此移动。在协作部分948a、948b相对朝向彼此移动时,凹槽950可以协作以调整加热端子234a、234b之间的间距。举例来说,加热端子234a、234b可以朝向彼此移动,如所说明。因此,如图21中说明,当协作部分948a、948b抵靠加热端子的相对侧夹持时,可以调整加热端子234a、234b的间距以匹配于所需间距。此外,通过在协作部分948a、948b之间的相对侧上夹持加热端子234a、234b,加热端子可由端子固定机构944保持,使得其加热端子突片是共面的,这可以促进加热元件到其的焊接。
应注意,在图19到21中说明的实施例中,协作部分948a、948b中界定的凹槽950经构造以使加热端子234a、234b朝向彼此移动。然而,在另一实施例中,如图22中说明,端子固定机构944'可以包含第一协作部分948a'和第二协作部分948b',其包含凹槽950',所述凹槽经构造以取决于加热端子的初始位置,通过使加热端子中的每一者朝向或远离另一加热端子移动来调整加热端子234a、234b之间的间距。因此,加热端子234a可以通过提供凹槽950'而定中心,所述凹槽经构造以使每一加热端子234a、234b在两个方向中的任一方向上移动。替代地,如可理解,在另一实施例中,所述凹槽可经构造以仅使端子移动远离彼此。因此,端子固定机构的协作部分的凹槽的特定形状和功能性的选择可以取决于在基座和加热端子到达端子加热元件耦接子站512时加热端子的初始构造。
在使用端子固定机构944将加热端子234a、234b以所需间距夹持于平面中的同时,输送设备905可以用夹具930保持单个分出的加热元件240和液体输送元件238,使得加热元件在成像装置942(参见图17)的视野中。举例来说,如图23中说明,夹具930可以最初将加热元件240和液体输送元件238保持于加热端子234a、234b上方,使得加热元件处于成像装置942的视野中,且进而成像装置可以确定加热元件的位置。借助于进一步实例,如上文所述,控制器417(参见例如图3)或单独的控制器可以从成像装置942捕捉的图像确定加热元件240的接触部分926、928的内部边缘926a、928a的位置。因此,可以确定加热元件240的接触部分926、928之间的中点。
类似地,可以确定加热端子234a、234b的位置。在此方面,如图23中说明,加热端子234a、234b可以分别在其经构造以焊接到加热元件240的接触部分926、928中的一者的一端处包括加热端子突片952a、952b。因此,可以确定加热端子突片952a、952b的位置。举例来说,控制器417(或另一控制器)可以从成像装置942捕捉的图像识别加热端子234a、234b的内部边缘954a、954b。进而,控制器417可以确定加热端子突片952a、952b之间的中点。
因此,输送设备905可以将加热元件240和液体输送元件移动到合适位置,以用于将加热元件焊接到加热端子234a、234b。在此方面,控制器417可以引导输送设备905使第一加热端子突片952a与第二加热端子突片952b之间的中点和第一接触部分926与第二接触部分928之间的中点对准。此外,控制器417可以引导输送设备905将加热元件240带到与加热端子突片952a、952b接合。特定来说,输送设备905可以使加热元件240的第一接触部分926与第一加热端子突片952a接合,且使第二接触部分928与第二加热端子突片952b接合。在一些实施例中,控制器417可以引导输送设备905抵靠加热端子突片952a、952b按压加热元件240,使得加热端子234a、234b稍微移位(例如,从约0.002英寸到约0.006英寸的距离,且优选约0.004英寸)。在此方面,通过抵靠加热端子突片952a、952b按压加热元件240(例如,在垂直于其大体上平面的前表面的方向上),可以确保加热元件与加热端子234a、234b之间的接触。
因此,如图24中说明,激光器940可以将加热元件240焊接到加热端子234a、234b。激光器940可以通过将激光束引导于第一加热端子突片952a处和第二加热端子突片952b处将加热元件240焊接到第一加热端子234a和第二加热端子234b。如图24中说明,可以将激光束引导于第一加热端子突片952a和第二加热端子突片952b的与加热元件240相对的背侧处。因此,来自激光束的能量可以加热加热端子突片952a、952b以致使加热端子突片焊接到加热元件的接触部分926、928,进而完成雾化器202(参见例如图1)。在说明的实施例中,将激光引导于每一加热端子突片952a、952b上的第一位置956a和第二位置956b处以提供相对较安全的焊接。然而,在其它实施例中,可以将激光束引导于更大或更小数目的位置处。应注意,通过将激光束引导于加热端子突片952a、952b处,可以通过对加热元件间接地而不是直接地施加热而避免关于损坏加热元件240的问题。
应注意,图23中说明的加热元件240包括界定可变线圈间距的导线。可以采用可变线圈间距来为接触部分926、928提供相对紧密的线圈间距。接触部分926、928处的此相对紧密的线圈间距可以通过在加热端子可以附着到的这些位置处提供更多导线材料而促进对其焊接加热端子234a、234b。
在接触部分926、928之间界定的加热元件240的中心部分929可用以在经由加热端子234a、234b通过其中供应电流时产生热。在加热元件240的中心部分929处线圈的间距可以大于在接触部分926、928处线圈的间距,因为所述中心部分不用于附着到加热端子234a、234b。然而,在加热元件240的中心部分929处线圈的间距可以小于定位在加热元件的接触部分926、928之外的导线的外部部分931a、931b处的任选线圈的间距。在此方面,外部部分931a、931b可能不产生热或促进对加热端子234a、234b的附着,且因此线圈的间距可以相对大,以便减少在加热元件240的形成中导线的材料使用。而在一些实施例中,可以提供外部部分931a、931b以便于制造大体上连续的加热元件输入906(参见例如图13)。关于采用可变线圈间距的雾化器的各种其它细节提供于2013年3月14日申请的美国专利申请序列号13/827,994中,所述申请如上所述以全文引用的方式并入本文。
进一步注意,可适用于本文描述的任何雾化器的上述线圈间距可能贯穿导线的每一部分不是均匀的。在此方面,在导线的一个或多个部分中的线圈间距可能存在一些变化。举例来说,线圈的间距可以在加热元件的中心部分上变化。因此,借助于进一步实例,上述线圈间距的差异可以涉及导线的每一部分的平均线圈间距。
在焊接后,可以将具有部分组装的烟弹200的托架600引导到液体输送元件弯曲子站514。液体输送元件弯曲子站514可经构造以使液体输送元件238弯曲以使得其末端沿着加热元件端子234a、234b向下延伸。然而,液体输送元件238和/或卷绕在其上的导线可能具有某种程度的弹性且在其弯曲后趋于回到初始的笔直构造。
在此方面,如图25中说明,在一些实施例中,托架600可以进一步包括可枢转的臂632a、632b,其经构造以接合液体输送元件238的末端以使得抵靠加热端子234a、234b而保持液体输送元件的末端。在此方面,可枢转的臂632a、632b可经构造以对液体输送元件238施加力以抵靠加热端子234a、234b保持液体输送元件。举例来说,磁体和/或弹簧可经构造以使可枢转的臂632a、632b中的每一者朝向液体输送元件238偏置。在此方面,在说明的实施例中,可枢转的臂632a、632b可以包含磁性部件634a、634b,其与托架600的静止磁性基座部件636a、636b协作以抵靠液体输送元件238偏置可枢转的臂632a、632b。然而,在其它实施例中可以采用各种其它偏置机构。
在液体输送元件238的弯曲和以可枢转的臂632a、632b将液体输送元件保持在弯曲构造中后,可以将托架600引导到储集器耦接子站516。如图26中说明,储集器耦接子站516可以包含卷轴1002。卷轴1002可经构造以供应大体上连续的储集器衬底输入1004,可从其切割个别的储集器衬底。可以控制大体上连续的储集器衬底输入1004中的张力以防止拉伸储集器衬底材料,所述拉伸可影响其液体储存和输送特性。在此方面,在一些实施例中,可以从卷轴1002主动地施配大体上连续的储集器衬底输入1004(例如,通过皮带1006),而不是从卷轴1002拉动。然而,在其它实施例中,可以被动地施配大体上连续的储集器衬底输入1004。
图27和28说明从供应自卷轴1002的大体上连续的储集器衬底输入1004单个分出个别储集器衬底。在此方面,如所说明,储集器耦接子站516可以进一步包括可移动夹具1008和静止夹具1009。可移动夹具1008可经构造以将预定义量的大体上连续的储集器衬底输入1004向下拉动到切割器1010中。在此方面,图27说明在上限处的可移动夹具1008,在所述上限处所述可移动夹具抓握大体上连续的储集器衬底输入1004。图28说明在下限处的可移动夹具1008。当可移动夹具1008到达下限时,可移动夹具已经使预定义长度的大体上连续的储集器衬底输入1004移动到切割器1010中,所述切割器切割大体上连续的储集器衬底输入以界定具有所需长度的个别储集器衬底。
此外,当可移动夹具1008到达下限时,静止夹具1009抓握大体上连续的储集器衬底输入1004。因此,在将大体上连续的储集器衬底输入1004切割为具有所需长度的个别储集器期间防止大体上连续的储集器衬底输入1004移动。此外,静止夹具1009通过在可移动夹具1008返回到上限时持续保持大体上连续的储集器衬底输入可以防止大体上连续的储集器衬底输入1004的不合意的向上移动。一旦可移动夹具1008到达上限且抓握大体上连续的储集器输入1004,静止夹具1009便可以释放大体上连续的储集器衬底输入以允许可移动夹具将预定义量的大体上连续的储集器衬底输入向下拉动到切割器1010中,如上文所述。
在单个分出后,传送机构1012可以接纳储集器衬底。如图28和29中说明,传送机构1012可以包含经构造以用可释放方式保持储集器衬底的头部部分1014。在一些实施例中,传送机构1012的头部部分1014可经构造以在其上对储集器衬底施加真空。在此方面,头部部分1014可以界定用以施加真空的多个孔口。然而,在其它实施例中,通过夹具或其它机械机构可以在传送机构1012上保持储集器。
如图29中说明,传送机构1012可经构造以从切割器1010接纳储集器衬底且将储集器衬底输送到缠绕机构1016。在此方面,传送机构1012可以沿着纵向路径1018且接着沿着横向路径1020行进以将储集器衬底传送到缠绕机构1016。缠绕机构1016可以包括经构造以接纳储集器衬底的头部部分1022。缠绕机构1016的头部部分1022可以采用真空来保持储集器衬底。在此方面,缠绕机构1016的头部部分1022可以在其内表面处界定用以施加真空的多个孔口。在一些实施例中,在储集器衬底从传送机构1012的头部部分1014到缠绕机构1016的头部部分1022的传送期间,在传送机构的头部部分处的真空可以切换到正压力。因此,从传送机构1012的头部部分1014引导出的空气可以将储集器衬底朝向缠绕机构1016的头部部分1022推动,这可以使用对其施加的真空来牢固地接合储集器衬底。
在从传送机构1012接纳储集器衬底之后,缠绕机构1016可以自旋(例如,约180度)以使得其头部部分1022接近于轨道616而定位,如图30中说明。在此方面,托架600可以将部分组装的烟弹递送到储集器耦接子站516。举例来说,部分组装的烟弹可以界定上文描述且在图25中说明的构造,其中液体输送元件238弯曲且通过可枢转的臂632a、632b保持在适当位置。
图30到32说明在储集器衬底到烟弹的添加期间储集器耦接子站516的部分的移动。应注意,图30到32中为了清楚目的而未说明托架和与其耦接的烟弹的组件。然而,如图30到32中说明,储集器耦接子站516可以进一步包括指状物1024a、1024b,其可与缠绕机构1016的头部部分1022协作以围绕烟弹的组件缠绕储集器衬底。简要来说,图30说明缠绕机构1016的头部部分1022在朝向烟弹将位于的位置的方向1026上的移动。如图31中说明,指状物1024a、1024b可以接着在朝向烟弹将位于的位置的方向1028上移动。此外,如图32中说明,指状物1024a、1024b可以在朝向彼此的方向1030a、1030b上移动。如图32中另外说明,缠绕机构1016可以在此时移动远离指状物1024a、1024b。
图33中示意性说明储集器耦接子站516的缠绕机构1016和指状物1024a、1024b与储集器衬底214的交互。如所说明,通过延伸穿过其中的孔口1032施加的真空可以将储集器衬底214保持到缠绕机构1016的头部部分1022。因此,储集器衬底214的第一末端1034a和第二末端1034b可以围绕流管210和/或烟弹的其它组件的相对侧延伸。在此方面,缠绕机构1016的头部部分1022的内表面可以界定弯曲构造,其致使储集器衬底214的末端1034a、1034b以它们可由指状物1024a、1024b抓住的方式围绕流管210延伸。更特定来说,缠绕机构1026的头部部分1022的内表面可以界定部分椭圆形构造,使得储集器衬底214的末端1034a、1034b当围绕流管缠绕时保持紧密接近流管210且可由指状物1024a、1024b抓住。
流管210可为不对称的。在此方面,流管210可以界定缩短侧210a和伸长侧210b(参见例如图1)。如图33中说明,缠绕机构1016可经构造以使得其头部部分1022被朝向流管210的伸长侧210b引导。在此方面,流管210的伸长侧210b可以均匀方式接触储集器衬底214且促进围绕其缠绕储集器衬底,而围绕流管的缩短侧210a缠绕储集器衬底可以导致储集器衬底的不均匀缠绕或者对例如控制组件等下层组件的损坏。
进一步应注意,加热端子234a、234b可以相对于缠绕机构1016而定向,使得当围绕部分组装的烟弹缠绕储集器衬底214时,迫使液体输送元件238进一步与加热端子接合。在此方面,如箭头1036a、1036b说明,可以通过储集器衬底214将液体输送元件238按压到由加热元件234a、234b界定的内角中。更特定来说,如所说明,加热元件234a、234b可以包含大体上垂直延伸的壁,界定“l形”,且可迫使液体输送元件238进入两个壁之间的内角中。因此,围绕部分组装的烟弹缠绕储集器衬底214可以辅助将液体输送元件238定位于所需的位置(例如,其中液体输送元件大体上平行于加热端子234a、234b的纵向长度延伸的位置)。
指状物1024a、1024b可经构造以接合储集器衬底214,且进一步围绕流管210和/或部分组装的烟弹的其余部分缠绕储集器衬底。举例来说,如图32和33中说明,指状物1024a、1024b可经构造以在朝向彼此的方向1030a、1030b上移动,使得围绕流管210和/或部分组装的烟弹的其它组件夹捏储集器衬底214。在一些实施例中,可以将指状物1024a、1024b大体上同时朝向彼此引导。举例来说,在其中储集器衬底214的末端1034a、1034b形成对接接头或者未另外重叠的烟弹的实施例中可以采用此做法。然而,在其中储集器衬底214的末端1034a、1034b重叠的实施例中,指状物1024a、1024b中的一者可以在另一指状物之前移动和/或比另一指状物更快地移动,使得所述末端中的一者可以围绕流管210缠绕,且接着储集器衬底的另一末端可以围绕所述末端缠绕。
在围绕流管210和雾化器212和/或烟弹的其它组件缠绕储集器衬底214之后,外部主体耦接子站518可以将外部主体耦接到基座。在此方面,如图30到32中说明,在一些实施例中,外部主体耦接子站518可以包含可接近指状物1024a、1024b定位的外部主体耦接工具1102。
此外,外部主体耦接子站518可以包含外部主体供应机构1104,如图34中说明。外部主体供应机构1104可以包含枢转叉1106。枢转叉1106可经构造以在初始大体上水平构造中接纳引导到其的外部主体216(参见例如图1),且接着如箭头1108指示而枢转,使得接纳于其上的外部主体大体上垂直延伸。进而,外部主体耦接工具1102可以在外部主体216上方引导,使得外部主体可以接纳于其中。
外部主体耦接工具1102可以包括多个区段(例如,两个或更多个区段),其协作以通过径向地彼此分离而接纳外部主体216。在此方面,图35说明外部主体耦接工具1102的区段1102a的透视图。如所说明,每一区段1102a可以界定唇缘1110,其经构造以当外部主体耦接工具的区段朝向彼此径向收缩时将外部主体216保持于外部主体耦接工具1102中。在此方面,外部主体耦接工具1102可以包含主体接纳部分1113,其界定至少与外部主体216的外部半径一样大的内部半径,且唇缘1110的内部半径可以小于外部主体的外部半径。
因此,如图36中说明,外部主体216可以通过唇缘1110保持于外部主体耦接工具1102中。如图36中进一步说明,外部主体耦接工具1102可以促进外部主体216在储集器衬底214上的放置。在此方面,外部主体耦接工具1002的每一区段1102a可以界定漏斗部分1112。漏斗部分1112可经构造以减小储集器衬底214的外部尺寸,使得储集器衬底的外部尺寸小于或等于外部主体216的内部尺寸以促进储集器衬底插入到外部主体中。在此方面,储集器衬底214可以包括柔性织物状材料,其可在某些方向上伸出,从而使得当储集器衬底围绕流管210和/或烟弹的其它组件缠绕时难以将储集器衬底214直接插入到外部主体216中。因此,漏斗部分1112可以界定小于或等于外部主体的内部半径的最小内部半径。因此,当外部主体耦接工具1102在储集器衬底214上方向下按压时,储集器衬底可由漏斗部分1112压实,使得其相对容易地滑动到外部主体216中。
如所说明,在一些实施例中,指状物1024a、1024b中的一者或两者可以接合储集器衬底214,使得当开始将储集器衬底通过外部主体耦接工具1002插入到外部主体216中时,储集器衬底保持至少部分地围绕雾化器缠绕。在此方面,指状物1024a、1024b可以在外部主体216在储集器衬底上方插入时防止储集器衬底214解开缠绕。然而,指状物1024a、1024b可以在外部主体216已经在其中接纳储集器衬底达预定义距离之后(例如,当储集器衬底进入外部主体半途时)从储集器衬底214释放,此时储集器衬底解开缠绕的风险大体上降低。
应注意,在一些实施例中,可以采用多组指状物1024a、1024b、1024a'、1024b'、1024a”、1024b”以将储集器衬底214保持在缠绕构造中,如图36a中说明。因此,在储集器衬底214通过外部主体耦接工具1002插入到外部主体216中时,指状物1024a、1024b、1024a'、1024b'、1024a”、1024b”可以循序地释放。举例来说,在储集器衬底214插入到外部主体216中时,可以释放第一组指状物1024a、1024b,随后是第二组指状物1024a'、1024b',随后是第三组指状物1024a”、1024b”。通过沿着部分组装的烟弹的纵向长度在不同位置采用多组指状物,储集器衬底可以在插入到外部主体中期间更牢固地保持于缠绕构造中,使得可以避免关于储集器衬底从缠绕构造移动的问题。
此外,在一些实施例中,外部主体耦接工具1102可以在储集器衬底214通过外部主体耦接工具插入到外部主体216中期间扭转,如图36和36a中说明。特定来说,外部主体耦接工具1102可以围绕其纵向轴线1114扭转。因此,可以减少外部主体耦接工具1102的漏斗部分1112与储集器衬底214之间的摩擦。在一些实施例中,外部主体耦接工具1102可以在单个方向上围绕纵向轴线1114扭转。在另一实施例中,外部主体耦接工具1102可以在插入期间在第一与第二相对方向1116a、1116b上旋转之间震荡,这可以减小储集器衬底214在通过外部主体耦接工具插入到外部主体216中期间移动的机会。应注意,在一些实施例中,外部主体耦接工具1102的区段1102a可以在外部主体216上夹持,使得外部主体随着外部主体耦接工具而旋转。因此,可以减少外部主体216与储集器衬底214之间的摩擦。因此,外部主体216相对于储集器衬底214的扭转移动可以进一步促进储集器衬底插入到外部主体中。
在储集器衬底214和烟弹的其它组件插入到外部主体216中后,外部主体可以耦接到基座204。在此方面,外部主体耦接子站518可以进一步包括卷曲器1118,如图37中说明。在一些实施例中,卷曲器1118可以包括多个区段1118a。举例来说,在图37中说明的实施例中,卷曲器1118包括可大体上相同的四个区段1118a。在此方面,包括四个或更多个区段的卷曲器的使用可以比界定较少区段的卷曲器更均匀地卷曲外部主体,使得可以避免外部主体与基座之间的泄漏。然而,在其它实施例中,区段的数目可以变化。举例来说,可以采用两个或更多个区段。
图38说明卷曲器1118的区段1118a中的一者。如所说明,每一区段1118a可以包含经构造以卷曲外部主体216的唇缘1120。图39说明来自图38的区段a的放大视图。如所说明,在图39中,成角度部分1122可以从唇缘1120延伸到卷曲器1118的区段1118a的内表面1124。在一些实施例中,区段1118a的成角度部分1122可以界定相对于卷曲器1118的纵向轴线1128的角度1126,卷曲器沿着所述纵向轴线从约10度到约15度且优选地约12度来接纳外部主体216。在此方面,成角度部分1122可以提供从通过唇缘1120在外部主体216中形成的卷曲到外部主体的其余部分的平滑过渡。进而,可以大体上避免外部主体216与基座204之间的泄漏。
因此,图4到39说明烟弹组装子系统402的一个实施例。然而,如可理解,根据本公开的实施例,可以采用烟弹组装子系统的各种其它实施例来组装烟弹。在此方面,图40示意性说明根据本公开的另一实施例的烟弹组装子系统402'。
如所说明,烟弹组装子系统402'可以包含基座加载子站1202、端子耦接子站1204、端子密封子站1206、控制组件耦接子站1208、流管耦接子站1210、加热元件耦接子站1212、液体输送元件弯曲子站1214、储集器耦接子站1216,以及外部主体耦接子站1218。此外,控制器417可经构造以控制烟弹组装子系统402'的子站1202到1218中的一者或多者。因此,烟弹组装子系统402'可以类似于上文描述且在图4到39中说明的烟弹组装子系统402。因此,为了简要目的,下文提供的关于烟弹组装子系统402'的描述将主要集中于相对于先前描述的烟弹组装子系统402的差异。
在此方面,上文描述的烟弹组装子系统402大体上从在各种子系统之间输送的托架600向上组装烟弹。更特定来说,托架600将大体上在每一子站处暂停,使得基座204处于静止位置,其中组件移动为从上方与其接触。
然而,下文描述的烟弹组装子系统402'不同之处在于基座204大体上被引导为与静止组件接触以形成烟弹。特定来说,在一些实施例中,基座204可以翻转且被大体上向下引导以与组件接合而形成烟弹。图41说明烟弹组装子系统402'的一个实施例的俯视图。在此方面,机器人(例如,机器人臂)可经构造以保持基座204且在组装期间将基座引导为与组件接触以形成烟弹。
举例来说,如图41中说明,可以采用多个机器人以将基座204移动为与各种组件接合以组装烟弹。所述机器人可以与烟弹的组件以及彼此交互以执行各种组装操作,使得每一机器人不会特定与图40中说明的子站1202到1218中的仅一者相关联。然而,如图41中说明,在一个实施例中,烟弹组装子系统402'可以包含控制组件端子机器人1302、加热端子机器人1304、机器人臂1306、控制组件和流管机器人1308、加热元件机器人1310、储集器衬底机器人1312,以及外部主体机器人1314。
如图42中说明,基座加载子站1202可以包含经构造以供应基座204的基座供应器1402。在一些实施例中,基座供应器1402可以包括振动料斗。此外,基座供应器1402可以定向基座204以用于抓握。在此方面,基座的附接末端204a(参见图1)可以由基座供应器1202向上定向。
如上所述,在一些实施例中,烟弹组装子系统402'的部分可经构造以抓住基座204以使得在烟弹的组装期间基座翻转。另外或替代地,烟弹组装子系统402'的部分可经构造以抓住经构造以接合控制主体的基座204的附接末端204a的内表面204a'(参见图1)。为了抓住基座204的附接末端204a的内表面204a',可以采用适当的夹爪。
在此方面,图43说明可由烟弹组装子系统402'的机器人采用的基座夹爪1500。如所说明,基座夹爪1500可以界定多个区段1502。区段1502可经构造以在插入到基座204的附接末端204a中期间收缩(例如,径向向内朝向彼此移动),且在插入到基座的附接末端之后膨胀(例如,径向向外移动远离彼此)。区段1502中的每一者的外表面1506上的多个突出部1504或其它特征(例如,凹座)可以辅助抓握基座204。举例来说,突出部1504可经构造以接合在基座204的附接末端204a的内表面204a'中界定的凹座。在此方面,基座夹爪1500的区段1502的外表面1506可经构造以对应于基座204的附接末端204a的内表面204a'的形状。因此,基座夹爪1500可以牢固地且可释放地接合基座204。
端子耦接子站1204可以包括控制组件端子机器人1302。如图42中说明,控制组件端子机器人1302可以包含基座夹爪1500。进而,控制组件端子机器人1302可以抓住由基座供应器1402供应的基座204。因此,控制组件端子机器人1302可以将控制组件端子耦接到基座。
在此方面,如图44中说明,端子耦接子站1204可进一步包括裸片1600,其经构造以准备用于附接到基座204的控制组件端子206。举例来说,可以从大体上连续的控制组件端子输入1602切割控制组件端子206。在此方面,切割器1604可以从大体上连续的控制组件端子输入1602切割控制组件端子206。
图44a说明裸片1600的放大视图。如图44a中说明,裸片1600可以进一步包括可定位于切割器1604的相对侧上的第一压力垫1606a和第二压力垫1606b。在切割器1604从大体上连续的控制组件端子输入1602切割控制组件端子206时,压力垫1606a、1606b可以延伸为接触且压抵大体上连续的控制组件端子输入1602。更特定来说,第一压力垫1606a可以压抵由切割器1604从大体上连续的控制组件端子输入1602切割的第一控制组件端子206a,且第二压力垫1606b可以压抵在线内接下来将从大体上连续的控制组件端子输入分离的第二控制组件端子206b。因此,第一控制组件端子206a在从大体上连续的控制组件端子输入1602切割的同时可以保持于适当位置,且第二控制组件端子206b也保持于适当位置,所述第二控制组件端子接着在大体上连续的控制组件端子输入的末端处变为第一控制组件端子。
在单个分出后,第一控制组件端子206a可以保持在静止位置以促进与基座204的耦接。更特定来说,第一控制组件端子206a可以夹在背衬部件1608与相对的压力垫1610之间。在此方面,相对的压力垫1610和背衬部件1608中的一者或两者可以朝向第一控制组件端子206a移动,使得第一控制组件端子夹在其间。如所说明,相对的压力垫1610和背衬部件1608可以界定匹配于每一个控制组件端子206的轮廓,使得控制组件端子可以牢固地保持于适当位置而不影响控制组件端子的形状。进而,可以将基座204引导为与单个分出的控制组件端子206接触。举例来说,控制组件端子机器人1302可以将基座204向下引导为与静止的控制组件端子206接触,使得控制组件端子接合基座。
端子耦接子站1204可以进一步包括加热端子机器人1304。在此方面,在控制组件端子机器人1302将控制组件端子206耦接到基座204之后,控制组件端子机器人可以将基座传送到加热端子机器人1304。在一些实施例中,传送部件可以促进基座204从控制组件机器人1302到加热端子机器人1304的传送。
如图45中说明,在一个实施例中,传送部件1700a包括轮1702,其旋转以将基座204从控制组件端子机器人1302递送到加热端子机器人1304。传送部件1700a可以进一步包括耦接到轮1702的一个或多个固定装置1704。因此,控制组件端子机器人1302可以将基座204放在一个固定装置1704中,传送部件1700a可以旋转,且加热端子机器人1304可以抓住固定装置中的基座且从其移除基座。
在此方面,通过将基座204放在固定装置1704中,基座可以被定位以使得加热端子机器人1304可以用与控制组件端子机器人1302抓住基座所采用的方式大体上相同的方式抓住基座。举例来说,加热端子机器人1304可以包含基座夹爪,例如上述基座夹爪1500。进而,基座204可以由加热端子机器人1304引导为与第一加热端子234a和第二加热端子234b(参见例如图1)接触。更特定来说,如图45中说明,第一裸片1612a和第二裸片1612b可以从第一和第二大体上连续的控制组件端子输入切割第一加热端子234a和第二加热端子234b,这可大体上类似于上述大体上连续的第一加热端子输入700。进而,在使第一加热端子234a和第二加热端子234b与基座204接合之后,加热端子机器人1304可以将基座放在第二传送部件1700b中(参见例如图41),这可大体上类似于上述传送部件1700a。
基座204接着可以由机器人臂1306接合。机器人臂1306可以将基座204放在第三传送部件1700c上,所述第三传送部件可大体上类似于先前描述的传送部件1700a、1700b。此外,在一些实施例中,在采用加热端子234a、234b相对于基座204的密封的实施例中,机器人臂1306可以包括端子密封子站1206的部分。在此方面,端子密封子站1206可以用与上述端子密封子站506大体上相同的方式运作,其中机器人臂1306以与机器人臂808(参见例如图10)大体上相同的方式运作。在一些实施例中,机器人臂808、1306中的一者或两者可以在密封过程期间采用上述基座夹爪1500来接合基座204。
无论是否采用端子密封子站1206,机器人臂1306都可以将基座204放在第三传送部件1700c上。随后,可以将基座204引导到控制组件耦接子站1208和流管耦接子站1210。在说明的实施例中,控制组件耦接子站1208和流管耦接子站1210两者包含且采用控制组件和流管机器人1308。
在此方面,如图46中说明,控制组件和流管机器人1308可经构造以在第三传送部件1700c处接合基座204。举例来说,如所说明,控制组件和流管机器人1308可以包含例如基座夹爪1500等夹爪。进而,控制组件和流管机器人1308可以将基座204传送到控制组件耦接子站1208。
此外,控制耦接子站1208可以包含控制组件供应器1802(参见图41),其经构造以供应电子控制组件208。在一些实施例中,控制组件供应器1802可以包括振动料斗。此外,控制组件供应器1802可以用所需方式定向电子控制组件208。举例来说,如图47中说明,每一个电子控制组件208可经定向以使得芯片208'(例如,存储器芯片)或电子控制组件的其它部分向上定向。在此方面,电子控制组件208的第一和第二主要侧可为不对称的,这可以促进通过控制组件供应器1802的定向以使得芯片208'向上延伸。
如图47中进一步说明,电子控制组件208可以界定第一和第二相对纵向末端208a、208b。在电子控制组件208的第一末端208a处的连接器可经构造以接合控制组件端子206。在此方面,如图46中说明,成像装置1804(例如,相机)可经构造以鉴于控制组件供应器1802供应电子控制组件的方向而确定第一末端208a是处于电子控制组件208的前方还是后方。
因此,如图47中说明,基于确定的电子控制组件208的定向,控制组件夹爪1806可以抓住电子控制组件的第二末端208b。在此方面,控制组件夹爪1806可以包含第一指状物1808a和第二指状物1808b,其经构造以在其间夹捏控制组件208的第二末端208b。如所说明,第一指状物1808a和第二指状物1808b可以相对窄。在此方面,控制组件供应器1802可以将控制组件208引导到支撑部件1810。支撑部件1810可以界定第一狭槽1812a和第二狭槽1812b,其经构造以当电子控制组件接纳于支撑部件上时分别与电子控制组件208的第一末端208a和第二末端208b对准。因此,夹爪1808a、1808b可以延伸到支撑部件1810中的狭槽1812a、1812b中的一者中,且抓住控制组件208的第二末端208b。
进而,如图47中进一步说明,控制组件夹爪1806可以使电子控制组件208旋转以使得其第一末端208a指向上。因此,控制组件和流管机器人1308可以向下引导基座204,使得电子控制组件208的第一末端208a接合控制组件端子206。在一些实施例中,在电子控制组件208的第一末端208a处的连接器(例如,接触片)可以位于电子控制组件的主要侧中的仅一个主要侧上,且控制组件端子206可为不对称的且经构造以接合仅所述特定侧。因此,控制组件和流管机器人1308可以使基座204旋转,使得当基座204被向下朝向电子控制组件引导时,实现电子控制组件208和控制组件端子206的所需旋转对准。
在电子控制组件208耦接到控制组件端子206之后,基座204可以由控制组件和流管机器人1308引导到流管耦接子站1210。如图41中说明,流管耦接子站1210可以包含经构造以供应流管210的流管供应器1902。在一些实施例中,流管供应器1902可以包括振动料斗。此外,流管供应器1902可以用所需方式定向流管210。
流管耦接子站1210可以进一步包括基座1904,如图46和48中说明。基座1904可以界定经构造以与流管210的内部部分配合以在其上支撑流管的向上延伸突出部。进而,控制组件和流管机器人1308可以将基座204向下朝向流管210引导。因此,流管210可以接纳于加热端子234a、234b之间且接合控制组件208。如图48中说明,流管夹爪1906可以抓住部分组装的烟弹。更特定来说,流管夹爪1906可以包含一对臂1908a、1908b,其各自包含经构造以抵靠流管210按压加热端子234a、234b的延伸部1910。因此,流管夹爪1906可以通过抵靠流管按压加热端子234a、234b间接地将流管210保持在适当位置。通过以此方式抓住部分组装的烟弹,控制组件和流管机器人1308的基座夹爪1500可以在部分组装的烟弹牢固地保持于适当位置的同时释放且从基座204缩回。
随后,加热元件机器人1310可以接合部分组装的烟弹。在此方面,如图49中说明,加热元件机器人1310可以包含端子夹爪2002。如所说明,端子夹爪2002可以包含第一臂2004a和第二臂2004b。端子夹爪2002的第一臂2004a可以包含第一对叉2006a,且端子夹爪的第二臂2004b可以包含第二对叉2006b。
在此方面,如图50中说明,端子夹爪2002可经构造以接合加热端子234a、234b。然而,如上所述,部分组装的烟弹可以通过流管夹爪1906保持在适当位置。因此,端子夹爪2002可经构造以避免接触流管夹爪1906。举例来说,如所说明,端子夹爪2002可经构造以至少部分地在流管夹爪1906的臂1908a、1908b之间延伸。在此方面,加热元件机器人1310可以旋转以使得端子夹爪2002的第一臂2004a和第二臂2004b垂直于流管夹爪1906的第一臂1908a和第二臂1908b而延伸。
因此,如图51中说明,端子夹爪2002可以抓握部分组装的烟弹。特定来说,第一对叉2006a和第二对叉2006b可以在其间夹捏加热端子234a、234b。更特定来说,第一对叉2006a中的一个以及第二对叉2006b中的一个可以压抵第一加热端子234a的相对侧,使得第一加热端子保持于其间。类似地,第一对叉2006a中的一个以及第二对叉2006b中的一个可以压抵第二加热端子234b的相对侧,使得第二加热端子保持于其间。如所说明,叉2006a、2006b可以接合加热端子234a、234b以使得加热端子突片952a、952b暴露。举例来说,当基座204经定向以使得加热端子234a、234b从其向下延伸时,叉2006a、2006b可以稍微高于加热端子突片952a、952b而接合加热端子。
此外,通过以上述方式抓住加热端子234a、234b,加热端子突片952a、952b可以构造于所需位置中以用于加热元件到其的附接。在此方面,如上文所述,流管夹爪1906可以抵靠流管210按压加热端子234a、234b。进而,当端子夹爪2002抓住加热端子234a、234b时,加热端子突片952a、952b可以界定其间的所需分离,如流管210的宽度所界定。此外,当端子夹爪2002用叉2006a、2006b压抵每一个加热端子突片952a、952b的相对侧时,加热端子突片可以对准。
加热元件耦接子站1212可以包含上述加热元件机器人1310。另外,如图52中说明,加热元件耦接子站1212可以包含准备部分2008和焊接部分2010。准备部分2008和焊接部分2010可以与上述准备部分902和焊接部分904(参见例如图12)大体上相同的方式运作。在此方面,如图53中说明,在一些实施例中,可以从大体上连续的加热元件输入2012供应加热元件。大体上连续的加热元件输入2012可以包括卷绕在液体输送元件238周围的多个加热元件240,如例如在2013年3月14日申请的美国专利申请序列号13/827,994和2012年12月7日申请的13/708,381中描述,以上申请以全文引用的方式并入本文。
如所说明,在一些实施例中,可以从卷轴2014供应大体上连续的加热元件输入2012。卷轴2014可以在大体上连续的加热元件输入2014从其拉动时被动地旋转。替代地,卷轴2014可以被主动地驱动(例如,通过电动机),使得卷轴在大体上连续的加热元件输入2012从其拉动时旋转。通过主动地旋转卷轴2014或者被动地允许卷轴在大体上连续的加热元件输入2012从其拉动时大体上自由地旋转,可以控制大体上连续的加热元件输入中的张力以避免对其的损坏。
在一个实施例中,可以监视大体上连续的加热元件输入2012的位置,使得卷轴2014可以主动地供应大体上连续的加热元件输入以维持其中的所需的松弛量。举例来说,如图53中说明,在一个实施例中,可以提供上部传感器2016a和下部传感器2016b,其中大体上连续的加热元件输入2012被拉离卷轴2014以使得其在传感器2016a、2016b之间延伸。在一个实施例中,传感器2016a、2016b可以各自包含光发射器和光检测器,所述光检测器可以检测何时物体阻挡光到达所述光检测器。因此,可以基于对大体上连续的加热元件输入2012的检测而主动地驱动卷轴2014。举例来说,如果上部传感器2016a检测到大体上连续的加热元件输入2012引起的光的阻挡,那么可以引导卷轴2014旋转或更快地旋转。相反,如果下部传感器2016b检测到大体上连续的加热元件输入2012引起的光的阻挡,那么可以引导卷轴2014更慢地旋转或停止。因此,可以控制大体上连续的加热元件输入2012中的张力。举例来说,控制器417可以与传感器2016a、2016b通信且经构造以如上文所述而引导卷轴2014旋转。
如上所述,加热元件耦接子站1212的准备部分2008可以大体上类似于上述准备部分902。在此方面,准备部分2008可经构造以准备耦接到液体输送元件238的个别加热元件240以用于焊接。因此,将不详细描述准备部分2008。
然而,简要来说,如图52中说明,准备部分2008可以包含施配器2018、切割器2020以及成像装置2022(例如,相机)。进而,施配器2018可以在大体上连续的加热元件输入2012上拉动,直到控制器基于由相机2022捕捉的图像而确定已经施配所需长度的大体上连续的加热元件输入2012为止。在此方面,控制器可以如上文所述的相同方式确定加热元件的中心。进而,输送设备2024(参见图54)可以抓住大体上连续的加热元件输入2012,使得加热元件240在其第一臂2026a与第二臂2026b之间位于中心。
切割器2020可以切割大体上连续的加热元件输入2012以单个分出个别的加热元件240和液体输送元件238。大体上连续的加热元件输入2012的新的末端可以由管2028支撑,如图52中说明,使得所述末端准备好由施配器2018抓住以便重复上述过程。
如图54中说明,焊接部分2010可以包括外壳2030。输送设备2024可以将单个分出的加热元件240和液体输送元件238输送到由外壳2030界定的腔室2032中。此外,如图55中说明,加热元件机器人1310可以变为与外壳2030接触。更特定来说,加热元件机器人1310可以至少将加热端子234a、234b的加热端子突片952a、954b引导到由外壳界定的腔室2032中。
因此,如图52中说明,成像装置2034(例如,相机)可以捕捉加热元件240以及加热端子234a、234b的加热端子突片952a、954b的图像。进而,控制器可以引导传送设备2024和加热元件机器人1030分别使加热元件240的中心和加热端子234a、234b的中心与成像装置2034的中心对准。因此,加热元件机器人1030可以抵靠加热元件240的接触部分926、928按压加热端子突片952a、952b(参见例如图23)。可以采用上视成像装置来确定加热端子234a、234b相对于加热元件240的水平位置,使得可以建立其间的接触。激光器2036可针对加热端子突片952a、952b的背面引导激光束,使得以如上文所述的大体上相同方式将加热元件240焊接到加热端子234a、234b。在此方面,气体施配器(例如,耦接到外壳2030的底部的配件)可经构造以将惰性气体(例如,氩气)施配到腔室2032中以改善所得焊接(例如,通过防止其氧化)。
此外,可以在将加热元件240焊接到第一加热端子234a和第二加热端子234b之前大体上密封由外壳2030界定的腔室2032。在此方面,如图55中说明,加热元件机器人1310可以包含经构造以接合外壳2030的密封部件2038。在此方面,当加热端子234a、234b插入到外壳2030中时,加热元件机器人1310的密封部件2038可以抵靠其进行密封。类似地,当输送设备将加热元件240引导到腔室2032中时第二密封部件2040可以将输送设备2024密封到外壳2030,且第三密封部件2042可以在相机2034和/或激光器2036与外壳2030之间产生密封。因此,通过大体上密封关闭由外壳界定的腔室2032,可以避免关于退出腔室的激光束的问题。另外,大体上密封腔室2032的使用可以通过在腔室2032中至少部分地保持惰性气体而促进惰性气体的使用。此外,如上所述,可以采用包含各种其它类型焊接的各种替代附接方法来将加热元件耦接到加热端子。
在焊接后,可以将部分组装的烟弹输送到液体输送元件弯曲子站1214。在此方面,在一些实施例中,加热元件机器人1310可以将部分组装的烟弹向其输送。图56说明液体输送元件弯曲子站1214的实例实施例。如所说明,液体输送元件弯曲子站1214可以包含第一直立部件2102a和第二直立部件2102b。在直立部件2102a、2102b中可以界定上部通道2104a、2104b和侧面通道2106a、2106b。
加热元件机器人1310可经构造以在液体输送元件弯曲子站1214的直立部件2102a、2102b之间引导部分组装的烟弹。更特定来说,加热元件机器人1310可以定向部分组装的烟弹以使得液体输送元件238进入上部通道2104a、2104b。在部分组装的烟弹向下插入在直立部件2102a、2102b之间时,液体输送元件238可以开始弯曲且进入界定于直立部件的内表面处的侧面通道2106a、2106b。此外,如图57中说明,直立部件2102a、2102b可以朝向彼此夹捏以使得液体输送元件238弯曲更多且变为与加热端子234a、234b接触。
一旦液体输送元件238弯曲,储集器衬底机器人1312便可以抓住部分组装的烟弹。如图58中说明,储集器衬底机器人1312可以包含基座和芯线夹爪2202。基座和芯线夹爪2202可以包含第一部分2204a和第二部分2204b。部分2204a、2204b中的每一者可以包含基座夹爪区段2206。举例来说,在说明的实施例中,基座夹爪区段2206包括若干v形缺口,所述v形缺口协作以使基座204在其中位于中心。此外,部分2204a、2204b中的每一者可以包含芯线夹爪区段2208,其经构造以接合液体输送元件238。
在此方面,图59说明与部分组装的烟弹接合的基座和芯线夹爪2202。如所说明,基座204可以接纳于基座夹爪区段2206之间。此外,芯线夹爪区段2208可以抵靠液体输送元件238的末端而夹捏。因此,基座和芯线夹爪2202可以将液体输送元件238保持在弯曲构造中。
储集器衬底机器人1312因此可以将部分组装的烟弹与处于弯曲构造中的液体输送元件238输送到储集器耦接子站1216,在此储集器衬底214耦接到所述部分组装的烟弹。因此,可以准备储集器衬底214以附接到部分组装的烟弹。在此方面,如图60中说明,在一些实施例中,可以从卷轴2304供应大体上连续的储集器衬底输入2302。卷轴2304可以在大体上连续的储集器衬底输入2302从其拉动时被动地旋转。替代地,卷轴2304可以被主动地驱动(例如,通过电动机),使得卷轴在大体上连续的储集器衬底输入2302从其拉动时旋转。通过主动地旋转卷轴2304或者被动地允许卷轴在大体上连续的储集器衬底输入2302从其拉动时大体上自由地旋转,可以控制大体上连续的储集器衬底输入中的张力以避免对其的损坏。
在一个实施例中,可以监视大体上连续的储集器衬底输入2302的位置,使得卷轴2304可以主动地供应大体上连续的储集器衬底输入以维持其中的所需的松弛量。举例来说,如图60中说明,在一个实施例中,可以提供上部传感器2306a和下部传感器2306b,其中大体上连续的储集器衬底输入2302被拉离卷轴2304以使得其在传感器2306a、2306b之间延伸。在一个实施例中,传感器2306a、2306b可以各自包含可定位于槽2308的相对末端处的光发射器和光检测器,且所述光检测器可以检测何时物体阻挡光到达所述光检测器。因此,可以基于对大体上连续的储集器衬底输入2302的检测而主动地驱动卷轴2304。举例来说,如果上部传感器2306a检测到大体上连续的储集器衬底输入2302引起的光的阻挡,那么可以引导卷轴2304旋转或更快地旋转。相反,如果下部传感器2306b检测到大体上连续的储集器衬底输入2302引起的光的阻挡,那么可以引导卷轴2304停止或更慢地旋转。因此,可以控制大体上连续的储集器衬底输入2302中的张力。举例来说,控制器417可以与传感器2306a、2306bb通信且经构造以如上文所述引导卷轴2304旋转。
大体上连续的储集器衬底输入2302可以从卷轴2304供应到单一化单元2310。如图61中说明,单一化单元2310可以包括旋转轮2312,所述旋转轮在其外表面处界定多个孔口2314。孔口2314可经构造以将真空施加于大体上连续的储集器衬底输入2302以使得在其上保持大体上连续的储集器衬底输入。此外,单一化单元2310可以包含切割器2316,如图62中说明。切割器2316可经构造以在预定间隔处切割大体上连续的储集器衬底输入2302,以便提供个别储集器衬底214。举例来说,切割器2316的一部分可延伸穿过界定于旋转轮2312中的切口2317,以便切割储集器衬底而不损坏旋转轮。因此,举例来说,旋转轮2312可以对应于个别储集器衬底的所需长度且对应于切口2317的中心之间的距离的步进式增量进行旋转。如图61中说明,在从大体上连续的储集器衬底输入2302切割之后,单个分出的储集器衬底214可以借助通过孔口2314施加的真空而保持在旋转轮2312上。然而,旋转轮2312可经构造以将储集器衬底214传送到缠绕机构2318。
在此方面,如图63中说明,缠绕机构2318可以包含经构造以在轨道2322上移动的可移动滑件2320。可移动滑件2320可以包括其中界定有一个或多个孔口2326的头部部分2324。进而,可移动滑件2320可以沿着轨道2322移动以使得头部部分2324变为接近于旋转轮2312。因此,储集器衬底214可以从旋转轮2312传送到可移动滑件2320的头部部分2324。举例来说,可以将真空施加于头部部分2324中的孔口2326。进而,当从保持储集器衬底214的旋转轮2312中的孔口2314解除真空和/或通过旋转轮中的孔口施加正压力时,储集器衬底可以传送到可移动滑件2320的头部部分2324。在此方面,旋转轮2312可经构造以使得在孔口2314到达对应于可移动滑件2320的头部部分2324与其接近的位置的指定角位置时真空停止或者对孔口2314施加正压力。
在储集器衬底214传送到可移动滑件2320的头部部分2324之后,可移动滑件可以开始移动回到初始起始位置。储集器衬底机器人1312可以将部分组装的烟弹带到与由可移动滑件2320的头部部分2324保持的储集器衬底214接触。接着,储集器衬底机器人1312和可移动滑件2320可以在同一方向上以同步方式移动,直到可移动部分到达图63中说明的位置为止。在此点,缠绕部件2330的第一臂2328a和第二臂2328b可以朝向彼此夹捏在一起,这可以致使储集器衬底214缠绕在部分组装的烟弹周围。臂2328a、2328b可以同时移动(例如,以在储集器衬底214的末端处产生对接接头)或者一个接一个地循序移动(例如,以致使储集器衬底的一个末端缠绕在另一末端周围)。在此方面,臂2328a、2328b可以与上文描述且在图33中说明的臂1024a、1024b大体上相同的方式运作。
在储集器衬底214的缠绕后,可以由外部主体机器人1314将部分组装的烟弹引导到外部主体耦接子站1218。如图64中说明,除了外部主体机器人1314之外,外部主体耦接子站1218还可以包含经构造以供应外部主体216204的外部主体供应器2402。在一些实施例中,外部主体供应器2402可以包括振动料斗,如图41中说明。
外部主体供应器2402可以将外部主体216供应到传送部件2404。传送部件2404可经构造以抓住个别外部主体216且定位外部主体以用于耦接到部分组装的烟弹。在此方面,如图65中说明,外部主体耦接子站1218可以包含经构造以促进储集器衬底214插入到外部主体216中的外部主体耦接工具2406,以及经构造以在外部主体在储集器衬底上方延伸且接合基座之后将外部主体卷曲到基座204的卷曲器2408。界定于卷曲器2408中的腔室2410可经构造以接纳外部主体216以使得部分组装的烟弹可插入其中且接着外部主体可以卷曲到基座204。
为了将外部主体216放在腔室2410中,如图66中说明,传送部件2404可以包含外部主体夹爪2412和旋转臂2414。因此,外部主体夹爪2412可以抓住由外部主体供应器2402供应的外部主体216。在一些实施例中,可以大体上水平构造来供应外部主体216。进而,旋转臂2414可以旋转以使得外部主体216大体上垂直且定位于外部主体耦接工具2406和卷曲器2408上方。外部主体夹爪2412可以释放外部主体216以使得其通过外部主体耦接工具2406下落到由卷曲器2408界定的腔室2410中。
在此方面,外部主体耦接工具2406可以包括多个区段。举例来说,在说明的实施例中,外部主体耦接工具2406包括第一区段2416a和第二区段2416b。外部主体耦接工具2406的区段2416a、2416b可以在其中所述区段彼此径向分离的扩展构造(参见例如图64和65)与其中所述区段彼此接触的收缩构造(参见图66)之间移动。外部主体耦接工具2406的每一区段2416a、2416b可以界定漏斗部分2418。漏斗部分2418可以协作以当区段2416a、2416b处于闭合构造中时界定漏斗,如图66中说明。因此,当部分组装的烟弹被引导为与其接触时,外部主体耦接工具2406可以减小储集器衬底214的外部尺寸,使得储集器衬底的外部尺寸小于或等于外部主体216的内部尺寸以促进储集器衬底插入到外部主体中。在此方面,储集器衬底214可以包括柔性织物状材料,其可在某些方向上伸出,从而使得当储集器衬底围绕流管210和/或烟弹的其它组件缠绕时难以将储集器衬底214直接插入到外部主体216中。因此,漏斗部分2418可以界定具有小于或等于外部主体216的内部半径的最小内部半径的漏斗。因此,当外部主体机器人1314通过外部主体耦接工具2406向下按压部分组装的烟弹时,储集器衬底214可由漏斗部分2418压实,使得其相对容易地滑动到外部主体216中。
外部主体机器人1314可以包含夹爪,其经构造以促进部分组装的烟弹通过外部主体耦接工具2406到外部主体216中的上述插入。在此方面,图67说明储集器夹爪2420的分解视图,且图68和69说明根据本公开的实例实施例的处于组装构造中的夹爪。如所说明,储集器夹爪2420可以包含第一主体部分2422a和第二主体部分2422b。第一主体部分2422a和第二主体部分2422b可经构造以在其间可释放地夹持基座204以便保持部分组装的烟弹。
此外,储集器衬底夹爪2420可以包含指状物2424,其经构造以将储集器衬底214保持于缠绕构造中。应注意,图67和68中为了清楚目的而未说明储集器衬底。指状物2424可以相对于储集器衬底夹爪2420的第一主体部分2422a以可移动方式耦接。储集器衬底夹爪2420可具备经构造以用下文描述的方式促进指状物2424的移动的各种特征。然而,在说明的实施例中,储集器衬底夹爪2420的第一主体部分2422a包含通道2426。通道2426可经构造以在指状物2424的上部部分处接纳突出部或销2428。在一些实施例中,通道2426可为大体上笔直的。此外,指状物2424可以包括伸长的孔口2430,其经构造以接纳耦接到第一主体部分2422a的突出部或销2432。如所说明,在一些实施例中,伸长的孔口2430可以大体上界定向上且远离指状物2424的尖端2434延伸的路径。
指状物2424可经构造以将储集器衬底214保持在缠绕构造中。在此方面,指状物2424的尖端2434可经构造以在外部主体机器人1314将部分组装的烟弹输送到外部主体耦接子站1218的同时压抵缠绕的储集器衬底214。在此方面,如图63中说明,缠绕机构2318的臂2328a、2328b可以各自包含可辅助上述缠绕操作的上部突出部2334a和下部突出部2334b。此外,来自一个臂2328a的突出部2334a、2334b可在臂朝向彼此移动时接触相对臂2334b上的突出部2334a、2334b,使得当储集器衬底处于缠绕构造中时臂之间存在间隙。
进而,在臂2328a、2328b将储集器衬底保持于缠绕构造中的同时,外部主体机器人1314可以使部分组装的烟弹与储集器衬底夹爪2420接合。更特定来说,第一主体部分2422a和第二主体部分2422b可以接合部分组装的烟弹的基座204。此外,指状物2424的尖端2434可以在突出部2334a、2334b之间或下方延伸以在接近于储集器衬底的末端重叠或在接头处会合的位置处接合储集器衬底。因此,当缠绕机构2318的臂2328a、2328b缩回时,储集器衬底夹爪2420可以通过压抵储集器衬底而将储集器衬底214保持于缠绕构造中。
因此,部分组装的烟弹可以包含当通过外部主体耦接工具2406插入到外部主体216中开始时缠绕在其周围的储集器衬底214。然而,指状物2424可经构造以在部分组装的烟弹插入到外部主体216中期间从储集器衬底214释放。在此方面,在外部主体机器人1314通过外部主体耦接工具2406插入部分组装的烟弹时,储集器衬底夹爪2420的指状物2424可以接触外部主体耦接工具。因此,在指状物2424保持与外部主体耦接工具接触的同时,第一主体部分2422a可以继续朝向外部主体耦接工具2406移动。因此,指状物2424可以沿着由通道2426与销2428之间以及伸长的孔口2430与销2432之间的交互界定的相对于第一主体部分2422a的路径移动。因此,由于通道2426大体上笔直,因此指状物2424的上部部分可以保持大体上静止。然而,由于伸长的孔口2430界定向上且远离指状物的尖端2434延伸的路径,因此可以向外引导指状物2424的下部部分远离储集器衬底214和部分组装的烟弹的其余部分。因此,指状物2424的尖端2434可以在外部主体机器人1314通过外部主体耦接工具2406插入部分组装的烟弹时偏转远离且释放储集器衬底214。
应注意,储集器衬底夹爪2420的特定实施例可以变化,同时仍以类似于上述方式的方式操作。举例来说,图69说明储集器衬底夹爪2420'的替代实施例。储集器衬底夹爪2420'可经构造以用类似于上述储集器衬底夹爪2420的方式抓住部分组装的烟弹的基座204。此外,储集器衬底夹爪2420'可以包含指状物2424',其经构造以将储集器衬底214可释放地保持于缠绕构造中。在此方面,指状物2424'的最内部分2434a'可经构造以压抵储集器衬底214。然而,最外部分2434b'可经构造以当外部主体机器人1314通过外部主体耦接工具引导部分组装的烟弹时偏转到外部主体耦接工具2406外部且远离所述外部主体耦接工具。在此方面,由于所述偏转,指状物2424'可以从储集器衬底214释放。因此,部分组装的烟弹通过外部主体耦接工具2406的插入可以大体上相同方式完成。
一旦部分组装的烟弹插入到外部主体216中,卷曲器2408便可以将外部主体卷曲到基座204。在此方面,如图65和66中说明,卷曲器2408可以包括多个区段2408a。举例来说,卷曲器2408可以包括至少四个区段2408a,其可以促进在基座与外部主体216之间产生紧密密封。区段2408a中的每一者可以包含唇缘、成角度部分以及上述卷曲器1118的一些或全部特征(参见图37到39)。因此,区段2408a可以从打开构造(参见例如图65)移动到闭合构造(参见例如图66)以将外部主体216卷曲到基座204。然而,应注意,卷曲器2408可以相对于上述卷曲器1118翻转。此外,卷曲器2408可经构造以在部分组装的烟弹通过外部主体耦接工具2406的插入期间保持外部主体216。因此,在一个或多个方面中,卷曲器2408可以不同于上述卷曲器1118。
应注意,可以许多方式组合和修改上述烟弹组装子系统402、402'而不脱离本公开的范围。在此方面,上文已大体上将加热元件描述为提供作为围绕大体上连续的液体输送元件卷绕的大体上连续的导线线圈。因此,个别加热元件240和液体输送元件238的准备涉及将大体上连续的输入切割为若干区段。然而,在其它实施例中,加热元件可以由烟弹组装子系统形成。
举例来说,如图70中说明,在一个实施例中,加热元件240'可以通过提供液体输送元件238且将导线242与其耦接以形成加热元件而形成。借助于进一步实例,在一个实施例中,导线242的末端240a可以插入通过液体输送元件238。随后,液体输送元件238和导线242中的一者或两者可以旋转以界定加热元件240'的线圈。此外,导线242的第二末端240b可以往回插入通过液体输送元件238,使得导线的第一末端240a和第二末端240b保持于适当位置,且加热元件保持于盘绕构造中。替代地,导线的末端中的一者或两者可以焊接到邻近线圈以将加热元件保持于适当位置和盘绕构造中。
因此,上述过程可以产生耦接到液体输送元件238的加热元件240',其在加热端子(例如,加热端子234a、234b)与其耦接(例如,经由本文公开的过程)时可以形成成品雾化器。在此方面,如上文所述,导线242可以在导线的第一末端240a和第二末端240b中的一者或两者处至少部分地延伸通过液体输送元件238。因此,导线242的末端可以大体上横向于液体输送元件的纵向长度而延伸通过液体输送元件238。液体输送元件238可以在第一和第二相对末端238a、238b之间延伸。然而,导线242不会延伸到液体输送元件的相对末端(应注意,输送元件的区段在图70中示出,而不是其完整长度)以便防止包含不必要的导线,如下文所述。加热元件240'可以包括接近于导线242的末端定位的两个接触部分244a、244b以及定位于接触部分之间的中心部分246。如所说明,接触部分244a、244b可以界定第一线圈间距,且中心部分246可以界定第二线圈间距,其中第二线圈间距大于第一线圈间距。如本文在别处相对于加热元件的另一实施例所述,这可以促进加热元件在接触部分处附接到加热端子。此外,通过以导线242终止于加热元件的接触部分244a、244b的方式形成加热元件240',与其中导线沿着液体输送元件的大体上整个长度延伸的实施例相比,可需要较少的导线242来形成加热元件。在此方面,定位于加热端子外部的导线可为成品雾化器中的浪费材料,因为在这些位置的导线将不用以促进到加热端子的耦接或产生热。
在外部主体216附接到基座后,可以将部分组装的烟弹引导到烟弹填充子站408。烟弹填充子站408可以包含一个或多个填充站。如图71中说明,在一个实施例中,烟弹填充子站408可以包含五个填充站2502a到2502e。此外,在一些实施例中,烟弹填充子站408可以包含环境控制外壳2504,填充站2502a到2502e定位于其中。因此,可以控制环境控制外壳2504内的环境。另外,环境修改设备2506可经构造以影响环境控制外壳2504内的环境。在一些实施例中,控制器417可经构造以控制烟弹填充子站408的站2502a到2502e和/或环境修改设备2506中的一者或多者。
在一个实施例中,环境修改设备2506可以包括经构造以影响环境控制外壳2504内的周围环境的除湿器。借助于额外实例,环境修改设备2506可经构造以控制环境控制外壳2504内的周围环境,使得所述周围环境界定小于约60%、优选小于约50%且最优选小于约40%的相对湿度。通过以此方式控制湿度,可以避免关于气溶胶前驱体组合物吸收周围水分的问题,所述问题可能不合意地稀释气溶胶前驱体组合物和/或过填充烟弹。
图72说明在填充期间以及在滴嘴与其耦接之前的部分组装的烟弹的俯视图。如所说明,填充装置2510(例如,填充针)的出口2508可以接近于储集器衬底214的多个角度部分2512a到2512d(例如,四分之一圆)而定位,其中所述角度部分是相对于延伸穿过烟弹的纵向轴线而界定。举例来说,如图72中说明,填充装置2510的出口2508可以循序地定位于第一角度部分2512a处,随后是第二角度部分2512b、第三角度部分2512c和第四角度部分2512d。在多个角度位置处引导气溶胶前驱体组合物可以增加用气溶胶前驱体组合物对储集器衬底214的填充速率。在此方面,储集器组合物214的吸收速率可以小于填充装置2510的出口2508的流出速率。因此,通过将出口2508移动到各种角度部分2512a到2512d,每一角度部分可以接收气溶胶前驱体组合物的流,以避免关于储集器衬底214的单个角度部分不能以填充装置2510施配气溶胶前驱体组合物的速率吸收气溶胶前驱体组合物的问题。
在一个实施例中,填充装置2510的出口2508可以在填充站一2502a处从第一角度部分2512a到第四角度部分2512d中的每一者循序地移动。随后,填充站二2502b到填充站五2502e可以在所述角度部分中的一者处定位填充装置2510的出口2508。举例来说,填充站二2502b可以在第一角度部分2512a处定位填充装置2510的出口2508,填充站三2502c可以在第二角度部分2512b处定位填充装置2510的出口2508,填充站四2502d可以在第三角度部分2512c处定位填充装置2510的出口2508,且填充站五2502e可以在第四角度部分2512d处定位填充装置2510的出口2508。因此,可以在填充站2502a到2502e之间输送烟弹,且可以在填充站中的每一者处将气溶胶前驱体组合物的流引导到储集器衬底214的角度部分2512a到2512d中的至少一者。
此外,如图73中说明,在储集器衬底的每一个角度部分处通过填充装置的出口引导气溶胶前驱体组合物2514的流的同时,填充装置2510的出口2508可以保持不与储集器衬底214接触。在此方面,通过避免与储集器衬底214接触,可以避免对其的损坏。此外,如图72和73中说明,填充装置2510可经构造以在每一个角度部分2512a到2512d处填充时压抵外部主体216的内表面。因此,可以稍微倾斜烟弹且可以沿着外部主体216的内表面向下引导气溶胶前驱体组合物2514,使得可以相对较快的速率填充储集器衬底214。
在填充之后,可以将烟弹引导到烟弹封盖子系统412,在此滴嘴220耦接到外部主体216。可以使用大体上类似于上述卷曲器的卷曲器将外部主体216卷曲到滴嘴220,以便防止外部主体与滴嘴之间的泄漏。此外,在一些实施例中,烟弹加标签子系统416可以将标签218施加于烟弹。
可以采用各种质量控制措施来确保合适地构造成品烟弹200。在此方面,如上所述和图3中说明,系统400可以另外包含检查子系统418,其可以检查组件406、未填充烟弹404、经填充烟弹410、经封盖烟弹414和/或成品烟弹200。此外,在一些实施例中,可以在烟弹组装子系统402、烟弹填充子系统408、烟弹封盖子系统412和烟弹加标签子系统416中的一者或多者处的中间完成状态下检查烟弹。因此,可以在烟弹的完成之前、期间和之后检查烟弹及其组件。
在此方面,可以在多种位置采用成像装置(例如,相机)以确保在规范内按需要执行上述过程。因此,可以在系统400内的多个位置采用相机和/或其它检查设备。然而,在某些位置的检查可能具有特定重要性。
在此方面,在插入到基座204中之后检查端子206、234a、234b的位置可为重要的。举例来说,一个或多个相机可经构造以检查端子206、234a、234b中的每一者的径向位置(例如,相对于基座204的中心)。端子206、234a、234b的径向位置可以在基座204的附接末端204a处确定。在此方面,端子206、234a、234b的恰当径向位置可以促进烟弹200到控制组件300的附接。此外,可以采用一个或多个相机来检查端子206、234a、234b从基座204延伸的距离。在一些实施例中,端子206、234a、234b从基座204延伸的距离可以在内部末端204b(参见图1)处确定。在此方面,端子206、234a、234b延伸到距基座204的内部末端204b的恰当距离对于确保加热元件240对其的恰当耦接来说可为重要的。
在烟弹组装子系统402中,端子206、234a、234b向下插入到基座204中。因此,在基座保持于在轨道616上行进的托架600中的同时,可以进行对端子206、234a、234b从基座204的内部末端204b延伸的距离的检查。在此方面,如图74中说明,侧视相机2602可经构造以在端子206、234a、234b中的一者或多者耦接到基座204后捕捉部分组装的烟弹的侧面轮廓的图像。进而,控制器可经构造以确定端子206、234a、234b中的一者或多者从基座204延伸的距离。
然而,由于基座204的附接末端204a朝向托架600向下定向,因此可以从托架移除基座以检查端子206、234a、234b的径向位置。在此方面,如图75中说明,移除机器人2604可经构造以从托架600移除部分组装的烟弹且在端视相机2606上方移动部分组装的烟弹。因此,由端视相机2604捕捉的图像可以由控制器分析以确定端子206、234a、234b中的一者或多者的径向位置。替代地,延伸穿过托架600的孔口可以允许在基座204的附接末端204a处检查端子206、234a、234b的径向位置。此外,应注意,在一些实施例中,可以为每一端子提供单独的相机以便聚焦于每一特定端子。在其它实施例中,可以采用一个相机,例如通过调整所述相机的焦距来检查多个端子。
在烟弹组装子系统402'的第二实施例中,以相对方式定向与基座204大体上组装的烟弹,使得与其耦接的组件从其向下延伸。在此方面,如图76中说明,可以采用传送部件1700a到1700c中的一者或多者的固定装置1704来促进对端子206、234a、234b的检查。举例来说,固定装置1704可以保持基座204以使得其附接末端204a向上延伸。因此,定位于基座204上方的端视相机2702可以检查端子206、234a、234b的径向位置。
此外,如图77中说明,固定装置1704可以包含延伸穿过其中的一个或多个孔口2704a、2704b。因此,如图76中说明,侧视相机2706可经定位以看穿孔口2704a、2704b中的一者或多者,以确定端子206、234a、234b从基座204的内部末端204b延伸的距离。在一些实施例中,可以为每一端子提供单独的相机以便聚焦于每一特定端子。在其它实施例中,可以采用一个相机,例如通过调整所述相机的焦距来检查多个端子。
检查子系统418可以另外包含经构造以在外部主体216卷曲到基座204后检查部分组装的烟弹的一个或多个相机。举例来说,如图78中说明,当检查烟弹组装子系统402的第一实施例时,检查子系统418可以包含经构造以捕捉外部主体216内部的图像的端视相机2802。在此方面,端视相机2802可以定位于卷曲器1118下游的轨道616上方,使得当托架600在端视相机下方引导时,所述端视相机可以捕捉外部主体216内部的一个或多个图像。进而,控制器可以确定储集器衬底214是存在(是所需条件)还是不存在(是不合意条件)。
此外,烟弹组装子系统402可以包含侧视相机2804,其经构造以捕捉部分组装的烟弹的侧面的图像。在此方面,侧视相机2804可定位于轨道616旁边,使得侧视相机可以捕捉由托架600保持的部分组装的烟弹的图像。在此方面,控制器可经构造以分析由侧视相机2804捕捉的图像以确定由卷曲器1118产生的外部主体216中的卷曲是否恰当(例如,当卷曲恰当时外部主体可以与基座204大体上齐平),且进一步控制器可以确定储集器衬底214是伸出到外部主体之外(例如,在外部主体与基座之间的接口处)(是不合意条件)还是含于外部主体内(是所需条件)。
如图79中说明,当检查烟弹组装子系统402'的第二实施例时,检查子系统418可以包含经构造以捕捉外部主体216内部的图像的端视相机2902,以及经构造以捕捉部分组装的烟弹的侧面的图像的侧视相机2904,使得控制器可以上述方式分析部分组装的烟弹的图像。此外,可以采用外部主体检查机器人1316来从卷曲器2408接收部分组装的烟弹,且将部分组装的烟弹引导到端视相机2902和侧视相机2904可以捕捉部分组装的烟弹的图像的位置。此外,在一些实施例中,外部主体检查机器人1316可以包含基座夹爪1500,其可以促进以上述方式抓握基座204。
检查子系统418可以另外包含吹通站。所述吹通站可经构造以引导空气流通过烟弹以对穿过其中界定的流动路径进行净化。在此方面,虽然未预期,但所述吹通站可以从穿过烟弹的流动路径移除任何灰尘或碎屑。举例来说,图80说明可与烟弹组装子系统402的第一实施例一起采用的吹通站3000。如所说明,吹通站3000可以包含第一连接器3002和第二连接器3004。在一个实施例中,第一连接器3002可经构造以接合托架600中与基座204的附接末端204a连通的孔口3006。在此方面,在一些实施例中,第一连接器可以包含弹性密封件3008,其经构造以接合托架600中的孔口3006。此外,第二连接器3004可经构造以例如经由弹性密封件而接合外部主体216的与基座204相对的末端。
连接器3002、3004可以处于不同压力下。因此,通过连接器3002、3004跨越烟弹施加的压力差可以造成引导空气流穿过其中。在一些实施例中,第一连接器3002可以处于比第二连接器3004高的压力,使得空气在与烟弹的正常使用期间将发生的方向相同的方向上流过烟弹。举例来说,可以将真空施加于第二连接器3004,而第一连接器3002可为环境压力。因此,可以移除烟弹中的任何碎屑。
图81说明可以与烟弹组装子系统402'的第二实施例一起包含的吹通站3100的实施例。如所说明,吹通站3100可以包含第一连接器3102和第二连接器3104。此外,吹通站3100可以包含可旋转臂3106和外部主体夹爪3108。外部主体检查机器人1316可以将部分组装的烟弹移动到吹通站3100。因此,外部主体夹爪3108可以抓住部分组装的烟弹的外部主体216,且可旋转臂3106可以使部分组装的烟弹旋转到连接器3102、3104之间的适当位置中。连接器3102、3104可以抵靠烟弹的末端收缩以与其形成密封。举例来说,连接器3102、3104可以分别包含弹性密封件3110、3112,其促进与基座204的附接末端204a和外部主体216的相对末端形成连接。在以上述方式的吹通完成后,连接器3102、3104可以缩回且可旋转臂3106可以使部分组装的烟弹旋转,使得可以抓住烟弹且移动到额外的站。应注意,如所说明,可以提供可大体上类似于吹通站3100的额外吹通站3100'以便增加处理量。
此外,检查子系统418可以另外包含压降站。压降站418可经构造以检测与将空气流引导通过部分组装的烟弹相关联的压降。因此,可以确定与烟弹相关联的压降且与所需压降进行比较,以确保烟弹中不存在任何阻塞或泄漏。
在一些实施例中,压降站可以大体上类似于吹通站。在此方面,图82说明可与烟弹组装子系统402的第一实施例一起采用的压降站3200。如所说明,压降站3200可以包含第一连接器3202和第二连接器3204。在一个实施例中,第一连接器3202可经构造以接合托架中与基座204的附接末端204a连通的孔口(参见例如图80的托架600中的孔口3006)。在此方面,在一些实施例中,第一连接器3202可以包含弹性密封件3208,其经构造以接合托架中的孔口。此外,第二连接器3204可经构造以例如经由弹性密封件而接合外部主体216的与基座204相对的末端。
连接器3202、3204中的一者可以已知流动速率和/或压力将空气供应到烟弹。此外,可以测试行进通过连接器3202、3204中的另一者的空气的流动速率和/或压力以确定与烟弹相关联的压降。进而,可以将所述压降与所需压降进行比较。
图83说明可以与烟弹组装子系统402'的第二实施例一起包含的压降站3300的实施例。如所说明,压降站3300可以包含第一连接器3302和第二连接器3304。此外,压降站3300可以包含可旋转臂3306和外部主体夹爪3308。因此,检查机器人1318(参见图41)可以将部分组装的烟弹从吹通站3100移动到压降站3300。因此,外部主体夹爪3308可以抓住部分组装的烟弹的外部主体216,且可旋转臂3306可以使部分组装的烟弹旋转到连接器3302、3304之间的适当位置中,所述连接器可一起移动以抵靠烟弹的末端而密封。举例来说,连接器3302、3304可以分别包含弹性密封件3310、3312,其促进与基座204的附接末端204a和外部主体216的相对末端形成连接。在以上述方式的压降测试完成后,连接器3302、3304可以缩回且可旋转臂3106可以使部分组装的烟弹旋转,使得可以抓住烟弹且移动到额外的站。应注意,如所说明,可以提供可大体上类似于压降站3300的额外压降站3300'以便增加处理量。
此外,检查子系统418可以另外包含电测试站。在此方面,图84说明可与烟弹组装子系统402的第一实施例一起包含的电测试站3400的实施例。如所说明,电测试站3400可以包含测试固定装置3402。此外,电测试站3400可以包含机器人臂3404,其经构造以将部分组装的烟弹从托架移动到测试固定装置3402并返回。机器人臂3404可以包含外部主体夹爪3406,其可经构造以抓住外部主体216的外表面。
图85说明测试固定装置3402的放大视图。如所说明,测试固定装置3402可以包括经构造以接合烟弹的基座204的插口3408。图86说明穿过测试固定装置3402的横截面图。在此方面,插口3408可以界定与控制主体300的耦接器302类似的形状和大小。然而,插口3408可以相对短于耦接器302,以便避免损坏基座204中的任选的防压部件。此外,插口3408可能不包含抗旋转特征,使得烟弹可以在任何旋转位置接合基座204。
如所说明,测试固定装置3402可以包括多个电触点,其耦接到插口3408且经构造以接合烟弹的端子。举例来说,第一电触点3410可经构造以接合第一加热端子234a,第二电触点3412可经构造以接合第二加热端子234b,且第三电触点3414可经构造以接合控制组件端子206。第一电触点3410可以由第一主体部分3416界定,第二电触点3412可以由第二主体部分3418界定,且第三电触点3414可以由第三主体部分3420界定。主体部分3416、3418、3420可以由导电且相对硬的材料形成,例如硬化钢,以便承受重复使用且允许以下文描述的方式穿过其中的电连通。
主体部分3416、3418、3420中的每一者可以耦接到不导电部件3422,其可以由多种不导电材料中的任一者形成,例如塑料。此外,主体部分3416、3418、3420可以通过避免其间的直接接触而彼此电绝缘。在此方面,主体部分3416、3418、3420可以经定位以使得其间界定气隙。举例来说,主体部分3416、3418、3420可以耦接到不导电部件3422,使得所述主体部分在耦接到不导电部件时彼此间隔开。替代地或另外,不导电隔片可以放置于主体部分3416、3418、3420之间。
测试固定装置3402可以与例如上述控制器417(参见例如图3)等控制器连通。控制器417可经构造以当烟弹的基座与插口3402接合时通过电触点3410、3412、3414与烟弹连通。进而,可以测试烟弹,且可以执行各种其它功能。举例来说,控制器417可经构造以确定烟弹的雾化器的电阻且将所述电阻与所需电阻进行比较。在一些实施例中,雾化器的电阻可以优选为1.5欧姆到约3.5欧姆,且更优选为约2.1欧姆到约3.0欧姆,这可对应于经构造以产生所需量的热的雾化器。此外,控制器417可经构造以确定雾化器是否短接到烟弹的外部主体。在此方面,控制器417可以检查以确保外部主体与端子206、234a、234b中的一者或多者之间的电阻大于约一兆欧姆。举例来说,可以通过外部主体夹爪3406将电流施加到烟弹的外部主体216,且控制器417可以检测到达端子206、234a、234b中的一者或多者的任何电流以确定所述端子与外部主体之间的电阻。在此方面,在不恰当组装的烟弹中,雾化器可能触碰外部主体,这可能造成电流在其间传送。
测试固定装置3402可以进一步包括孔口3426,其经构造以提供通过烟弹的基座204的空气流。因此,在一些实施例中,可以采用测试固定装置3402来执行上述流过和/或压降操作。因此,举例来说,在测试固定装置中的孔口3426可以与第一连接器连通,且外部主体夹爪3406可以包含第二连接器,使得可以通过由测试固定装置3402和外部主体夹爪保持的烟弹来提供空气流。
此外,控制器417可经构造以通过第三电触点3414和控制组件端子206将程序代码指令传输到烟弹的电子控制组件208。因此,举例来说,可以将界定在检测到喷烟后何时以及将多少电流施加于雾化器的加热设定档写入到电子控制组件208。另外,程序代码指令可以包含验证代码,可以采用所述验证代码来核实烟弹是正版的。控制器417可进一步经构造以读取存储在电子控制组件208上的程序代码指令,且确定存储在电子控制组件上的程序代码指令是否对应于所需的程序代码指令。举例来说,可以采用读取存储的程序代码指令以确保存储恰当的加热设定档和验证代码。也可以从其读取与电子控制组件208相关联的唯一识别符,其可用以在数据库中记录关于烟弹的信息(例如,制造日期、加热器设定档、验证代码等)。控制器417也可以初始化电子控制组件208以使得电子控制组件在检测到第一次喷烟而不是第二次喷烟后将电流引导到雾化器,当电子控制组件未初始化时可能发生在检测到第二次喷烟后将电流引导到雾化器。
图87说明可以与烟弹组装子系统402'的第二实施例一起包含于检查子系统418中的电测试站3500的实施例。可以通过上述检查机器人1318将烟弹递送到电测试站3500。在此方面,检查机器人1318可以将烟弹放在测试固定装置3502上。夹爪3504可经构造以在测试固定装置3502的插口3506上按压且保持烟弹。测试固定装置3502的功能性和结构可以大体上类似于上述测试固定装置3402。因此,其描述将不再重复。然而,测试固定装置3502可以进一步包括定位于插口3506的相对侧上的狭槽3508。狭槽3508可经构造以接纳测试固定装置机器人1320的夹爪3510,使得夹爪可以在基座下方抓住以从插口移除烟弹。因此,夹爪3510可以将烟弹拉离插口3506。应注意,如所说明,可以提供可大体上类似于测试固定装置3500的额外测试固定装置3500'以便增加处理量。
在一些实施例中,检查子系统418可以另外包含质量保证站。质量保证站可以定位于组装过程中的任何点处。举例来说,质量保证站可以定位于将外部主体216卷曲到基座204的卷曲器1118、2408的下游。然而,质量保证站可经构造以接收处于各种完成状态的部分组装的烟弹。在此方面,烟弹组装子系统402、402'的各种子站可经构造以将烟弹在其组装期间发生的各种完成状态中的任一种中引导到质量保证站。因此,举例来说,可以将耦接有端子206、234a、234b的基座204引导到质量保证站,而无电子控制组件、流管、储集器衬底和外部主体与其耦接。借助于进一步实例,烟弹组装子系统402的第一实施例的托架600可以跳过各种站,和/或烟弹组装子系统402'的第二实施例的一些机器人可以将部分组装的烟弹传送到质量保证站而不对其执行操作。可以手动地检查或者经由自动化过程来检查被引导到质量保证站的部分组装的烟弹,以确保烟弹得到恰当组装。在一些实施例中,可以按预定义间隔将界定各种完成状态的部分组装的烟弹引导到质量保证站,使得可以规则地检查处于各种完成状态中的每一种的部分组装的烟弹。
检查子系统418可经构造以抛弃未能满足如上文所述的某些预定义标准的有缺陷烟弹。举例来说,在烟弹组装子系统402的第一实施例中将部分组装的烟弹识别为有缺陷之后,保持有缺陷烟弹的托架600可以跳过剩余组装站且将烟弹引导到报废站,在此从其移除有缺陷烟弹(例如,经由真空软管)以进行抛弃。借助于进一步实例,在烟弹组装子系统402'的第二实施例中将部分组装的烟弹识别为有缺陷之后,接近于烟弹被确定为有缺陷的位置的机器人可以将有缺陷烟弹下落到废品插口中。举例来说,图79说明在支撑烟弹组装子系统402'的台3602中的插口3600,其中可以放入有缺陷烟弹(例如,在端子206、234a、234b的检查后)。在此方面,插口可以与检查烟弹的每一位置相关联,使得可以立即抛弃有缺陷烟弹。
检查子系统418可以在烟弹填充子系统408处的填充、烟弹封盖子系统410处的封盖和/或烟弹加标签子系统412处的加标签后另外检查烟弹。举例来说,检查子系统418可经构造以在填充之后检测烟弹中的泄漏。借助于进一步实例,检查子系统418可以包含相机,经填充烟弹被提升于所述相机上方,且可以将捕捉的图像与没有泄漏的已知可接受烟弹的所存储图像进行比较。额外的相机可以确保将滴嘴220恰当地卷曲到外部主体216。举例来说,可以按与用以将基座204附接到外部主体的卷曲大体上相同的方式来检查与滴嘴220到外部主体216的附接相关联的卷曲。此外,在将标签218施加于外部主体216后,相机可以检查标签的放置以确保其恰当定位。
还提供用于组装用于气溶胶递送装置的烟弹的方法。如图88中说明,所述方法可以包括在操作3702处提供至少部分地围绕雾化器延伸的储集器衬底。此外,所述方法可以包含在操作3704处提供经构造以至少部分地在其中接纳储集器衬底和雾化器的外部主体。另外,所述方法可以包含在操作3706处通过工具将储集器衬底插入到外部主体中,所述工具界定经构造以减小储集器衬底的外部尺寸的漏斗部分,使得储集器衬底的外部尺寸小于或等于外部主体的内部尺寸以促进储集器衬底插入到外部主体中。
在一些实施例中,所述方法可以另外包含在操作3706处在通过工具将储集器衬底插入到外部主体中的同时相对于储集器衬底扭转所述工具。在操作3702处提供至少部分地围绕雾化器延伸的储集器衬底可以包括在操作3706处通过工具将储集器衬底插入到外部主体中之前至少部分地围绕雾化器缠绕储集器衬底。至少部分地围绕雾化器缠绕储集器衬底可以包括将空气流引导于储集器衬底处。
所述方法可以进一步包括当在操作3706处开始通过工具将储集器衬底插入到外部主体中时使储集器衬底与一个或多个指状物接合以使得储集器衬底保持至少部分地缠绕在雾化器周围。此外,所述方法可以包含当储集器衬底插入到工具中达到预定深度时从储集器衬底释放所述一个或多个指状物。释放所述一个或多个指状物可以包括通过使所述一个或多个指状物与工具接触而使所述一个或多个指状物偏转远离储集器衬底。此外,释放所述一个或多个指状物可以包括循序地释放所述指状物。所述方法可以进一步包括在至少部分地围绕雾化器缠绕储集器衬底之前将雾化器耦接到基座,且在操作3706处通过工具将储集器衬底插入到外部主体中之后将外部主体耦接到基座。另外,所述方法可以包含从大体上连续的储集器衬底输入供应储集器衬底,且控制大体上连续的储集器衬底输入中的张力。
还提供用于组装用于气溶胶递送装置的雾化器的方法。如图89中说明,所述方法可以包含在操作3802处提供第一加热端子、第二加热端子和加热元件。此外,所述方法可以包含在操作3804处确定第一加热端子和第二加热端子的位置。所述方法还可以包含在操作3806处确定加热元件的位置。另外,所述方法可以包含在操作3808处基于第一加热端子和第二加热端子的位置以及加热元件的位置将加热元件附着到第一加热端子和第二加热端子(例如,使得在其间建立电连接)。
在操作3804处确定第一加热端子和第二加热端子的位置可以包括确定第一加热端子突片与第二加热端子突片之间的中点。所述加热元件可以包括第一接触部分和第二接触部分,且在操作3806处确定加热元件的位置可以包括确定第一接触部分与第二接触部分之间的中点。所述方法可以进一步包括使第一加热端子突片与第二加热端子突片之间的中点和第一接触部分与第二接触部分之间的中点对准,使第一接触部分与第一加热端子突片接合,且使第二接触部分与第二加热端子突片接合。
所述方法可以进一步包括夹持第一加热端子和第二加热端子以使得第一加热端子突片和第二加热端子突片大体上共面。夹持第一加热端子和第二加热端子可以包括调整第一加热端子与第二加热端子之间的间距。在操作3808处将加热元件附着到第一加热端子和第二加热端子可以包括将多个激光束引导于第一加热端子突片处和第二加热端子突片处。将激光束引导于第一加热端子突片处和第二加热端子突片处可以包括将激光束引导于第一加热端子突片和第二加热端子突片的与加热元件相对的背侧处。所述方法可以进一步包括在将激光束引导于第一加热端子突片处和第二加热端子突片处之前将加热元件、第一加热端子和第二加热端子插入到大体上密封的腔室中。
在操作3802处提供加热元件可以包括从大体上连续的加热元件输入供应加热元件,且控制大体上连续的加热元件输入中的张力。所述方法可以进一步包括将加热元件耦接到液体输送元件。将加热元件耦接到液体输送元件可以包括将加热元件的一端插入穿过液体输送元件且使加热元件和液体输送元件中的至少一者旋转以使得加热元件围绕液体输送元件卷绕。在操作3802处提供第一加热端子和第二加热端子可以包括从大体上连续的第一加热端子输入供应第一加热端子,且从大体上连续的第二加热端子输入供应第二加热端子。
在一些实施例中,加热元件可以包括围绕液体输送元件卷绕的导线。所述导线可以包括两个接触部分、一个中心部分以及定位于所述接触部分之外的两个外部部分,所述导线的两个接触部分和中心部分界定加热元件。所述接触部分可以界定第一线圈间距,所述中心部分可以界定第二线圈间距,且所述外部部分可以界定第三线圈间距。第三线圈间距可以大于第二线圈间距,且第二线圈间距可以大于第一线圈间距。此外,在操作3808处将加热元件附着到第一加热端子和第二加热端子可以包括将所述接触部分附着到第一加热端子和第二加热端子。
还提供烟弹填充方法。如图90中说明,所述方法可以包含在操作4002处提供用于气溶胶递送装置的烟弹,其包括定位于外部主体中的储集器衬底。此外,所述方法可以包含在操作4004处接近于储集器衬底的多个角度部分循序地定位填充装置的出口。所述方法可以另外包含在操作4006处通过填充装置的出口将气溶胶前驱体组合物的流引导于储集器衬底的角度部分中的每一者处。
在一些实施例中,填充装置的出口可以保持不与储集器衬底接触。此外,所述方法可以包含在多个填充站之间输送烟弹,其中在填充站中的每一者处将气溶胶前驱体组合物的流引导到储集器衬底的角度部分中的至少一者。另外,可以在填充站中的第一者处将气溶胶前驱体组合物的流引导于储集器衬底的角度部分中的每一者处。在填充站中的剩余部分处分别将气溶胶前驱体组合物的流引导到储集器衬底的角度部分中的一者。所述方法可以进一步包括控制其中填充烟弹的周围环境,使得所述周围环境界定小于约40%的相对湿度。
还提供用于组装用于气溶胶递送装置的烟弹的方法。如图91中说明,所述方法可以包含在操作4102处抓住基座。此外,所述方法可以包含在操作4104处提供经构造以接合基座的多个组件,所述组件提供于静止位置中。另外,所述方法可以包含在操作4106处通过将基座引导为与处于静止位置中的组件接触而将所述组件耦接到基座。
在操作4102处抓住基座可以包括抓住基座的经构造以接合控制主体的附接末端的内表面。在操作4106处将基座引导为与处于静止位置中的组件接触可以包括将基座向下引导为与所述组件接触。所述方法可以进一步包括将基座插入到固定装置中且检查通过所述固定装置耦接到基座的第一和第二加热端子的位置。
如上所述,系统400可以包含控制器417。控制器417可经构造以执行用于执行本文描述的操作的计算机代码。在此方面,如图92中说明,控制器417可以包括处理器4202,其可为微处理器或用于控制其总体操作的控制器。在一个实施例中,处理器4202可以特定经构造以执行本文描述的功能。控制器417还可包含存储器装置204。存储器装置4204可以包含非暂时性和有形存储器,其可为例如易失性和/或非易失性存储器。存储器装置4204可经构造以存储信息、数据、文件、应用程序、指令或类似物。举例来说,存储器装置4204可经构造以缓冲输入数据以由处理器4202处理。另外或替代地,存储器装置4204可经构造以存储用于由处理器4202执行的指令。
控制器417还可以包含允许用户与其交互的用户接口4206。举例来说,用户接口4206可以采取多种形式,例如按钮、小键盘、拨盘、触摸屏、音频输入接口、视觉/图像捕捉输入接口、呈传感器数据的形式的输入等。再者,用户接口4206可经构造以通过显示器、扬声器或其它输出装置将信息输出给用户。通信接口4208可以提供例如通过有线或无线网络4210发射和接收数据,例如局域网(lan)、城域网(man)和/或广域网(wan)(例如,因特网)。
所描述实施例的各种方面、实施例、实施或特征可以单独地或以任何组合来使用。所描述实施例的各种方面可以通过软件、硬件或硬件与软件的组合来实施。所描述实施例还可以体现为计算机可读媒体上的用于控制上述操作的计算机可读代码。特定来说,计算机可读代码可经构造以执行本文描述的方法的每一个操作且体现为计算机可读媒体上的用于控制上述操作的计算机可读代码。在此方面,如本文使用的计算机可读存储媒体指代可由计算机系统读取的非暂时性物理存储媒体(例如,易失性或非易失性存储器装置)。计算机可读媒体的实例包含只读存储器、随机存取存储器、cd-rom、dvd、磁带以及光学数据存储装置。计算机可读媒体还可以分布于网络耦接的计算机系统上,使得以分布式型式存储和执行计算机可读代码。
如上所述,控制器417可经构造以执行用于执行上述操作的计算机代码。在此方面,提供用于存储由经构造以组装用于气溶胶递送装置的烟弹的控制器(例如,控制器417)中的处理器执行的计算机指令的非暂时性计算机可读媒体的实施例。所述非暂时性计算机可读媒体可以包括:用于提供至少部分地围绕雾化器延伸的储集器衬底的程序代码指令;用于提供经构造以至少部分地在其中接纳储集器衬底和雾化器的外部主体的程序代码指令;以及用于通过工具将储集器衬底插入到外部主体中的程序代码指令,所述工具界定经构造以减小储集器衬底的外部尺寸的漏斗部分,使得储集器衬底的外部尺寸小于或等于外部主体的内部尺寸以促进储集器衬底插入到外部主体中。
所述计算机可读媒体可以进一步包括用于在通过工具将储集器衬底插入到外部主体中的同时使工具相对于储集器衬底扭转的程序代码指令。用于提供至少部分地围绕雾化器延伸的储集器衬底的程序代码指令可以包括用于在通过工具将储集器衬底插入到外部主体中之前至少部分地围绕雾化器缠绕储集器衬底的程序代码指令。用于至少部分地围绕雾化器缠绕储集器衬底的程序代码指令可以包括用于将空气流引导于储集器衬底处的程序代码指令。所述计算机可读媒体可以进一步包括用于在开始通过工具将储集器衬底插入到外部主体中时使储集器衬底与一个或多个指状物接合以使得储集器衬底保持至少部分地缠绕在雾化器周围的程序代码指令。所述计算机可读媒体可以进一步包括用于当储集器衬底插入到工具中达到预定深度时从储集器衬底释放所述一个或多个指状物的程序代码指令。用于释放所述一个或多个指状物的程序代码指令可以包括用于通过使所述一个或多个指状物与工具接触而使所述一个或多个指状物偏转远离储集器衬底的程序代码指令。用于释放所述一个或多个指状物的程序代码指令可以包括用于循序地释放所述指状物的程序代码指令。所述计算机可读媒体可以进一步包括用于在至少部分地围绕雾化器缠绕储集器衬底之前将雾化器耦接到基座的程序代码指令;以及用于在通过工具将储集器衬底插入到外部主体中之后将外部主体耦接到基座的程序代码指令。所述计算机可读媒体可以进一步包括用于从大体上连续的储集器衬底输入供应储集器衬底的程序代码指令;以及用于控制大体上连续的储集器衬底输入中的张力的程序代码指令。
在额外实施例中,一种用于存储由经构造以组装用于气溶胶递送装置的雾化器的控制器(例如,控制器417)中的处理器执行的计算机指令的非暂时性计算机可读媒体可以包括:用于提供第一加热端子、第二加热端子和加热元件的程序代码指令;用于确定第一加热端子和第二加热端子的位置的程序代码指令;用于确定加热元件的位置的程序代码指令;以及用于基于第一加热端子和第二加热端子的位置以及加热元件的位置将加热元件附着到第一加热端子和第二加热端子的程序代码指令。用于确定第一加热端子和第二加热端子的位置的程序代码指令可以包括用于确定第一加热端子突片与第二加热端子突片之间的中点的程序代码指令。
在一些实施例中,所述加热元件可以包括第一接触部分和第二接触部分,且用于确定加热元件的位置的程序代码指令可以包括用于确定第一接触部分与第二接触部分之间的中点的程序代码指令。所述计算机可读媒体可以进一步包括用于使第一加热端子突片与第二加热端子突片之间的中点和第一接触部分与第二接触部分之间的中点对准的程序代码指令;用于使第一接触部分与第一加热端子突片接合的程序代码指令;以及用于使第二接触部分与第二加热端子突片接合的程序代码指令。所述计算机可读媒体可以另外包含用于夹持第一加热端子和第二加热端子以使得第一加热端子突片和第二加热端子突片大体上共面的程序代码指令。用于夹持第一加热端子和第二加热端子的程序代码指令可以包括用于调整第一加热端子与第二加热端子之间的间距的程序代码指令。用于将加热元件附着到第一加热端子和第二加热端子的程序代码指令可以包括用于将激光束引导于第一加热端子突片处和第二加热端子突片处的程序代码指令。用于将激光束引导于第一加热端子突片处和第二加热端子突片处的程序代码指令可以包括用于将激光束引导于第一加热端子突片和第二加热端子突片的与加热元件相对的背侧处的程序代码指令。所述计算机可读媒体可以进一步包括用于在将激光束引导于第一加热端子突片处和第二加热端子突片处之前将加热元件、第一加热端子和第二加热端子插入到大体上密封的腔室中的程序代码指令。用于提供加热元件的程序代码指令可以包括用于从大体上连续的加热元件输入供应加热元件的程序代码指令;以及用于控制大体上连续的加热元件输入中的张力的程序代码指令。所述计算机可读媒体可以进一步包括用于将加热元件耦接到液体输送元件的程序代码指令。用于将加热元件耦接到液体输送元件的程序代码指令可以包括用于将加热元件的一端插入穿过液体输送元件的程序代码指令;以及用于使加热元件和液体输送元件中的至少一者旋转以使得加热元件围绕液体输送元件卷绕的程序代码指令。用于提供第一加热端子和第二加热端子的程序代码指令可以包括用于从大体上连续的第一加热端子输入供应第一加热端子的程序代码指令;以及用于从大体上连续的第二加热端子输入供应第二加热端子的程序代码指令。所述加热元件可以包括围绕液体输送元件卷绕的导线。所述导线可以包括两个接触部分、一个中心部分以及定位于所述接触部分之外的两个外部部分,所述导线的两个接触部分和中心部分可以界定加热元件,其中所述接触部分界定第一线圈间距,所述中心部分界定第二线圈间距,且所述外部部分界定第三线圈间距,第三线圈间距大于第二线圈间距,且第二线圈间距大于第一线圈间距,且其中将加热元件附着到第一加热端子和第二加热端子包括将所述接触部分附着到第一加热端子和第二加热端子。
在额外实施例中,一种用于存储由经构造以填充烟弹的控制器(例如,控制器417)中的处理器执行的计算机指令的非暂时性计算机可读媒体可以包括:用于提供用于气溶胶递送装置的烟弹的程序代码指令,所述烟弹包括定位于外部主体中的储集器衬底;用于接近于储集器衬底的多个角度部分循序地定位填充装置的出口的程序代码指令;以及用于通过填充装置的出口将气溶胶前驱体组合物的流引导于储集器衬底的角度部分中的每一者处的程序代码指令。填充装置的出口可以保持不与储集器衬底接触。所述计算机可读媒体可以进一步包括用于在多个填充站之间输送烟弹的程序代码指令,其中在填充站中的每一者处将气溶胶前驱体组合物的流引导到储集器衬底的角度部分中的至少一者。可以在填充站中的第一者处将气溶胶前驱体组合物的流引导于储集器衬底的角度部分中的每一者处。可以在填充站中的剩余部分处分别将气溶胶前驱体组合物的流引导到储集器衬底的角度部分中的一者。所述计算机可读媒体可以进一步包括用于控制其中填充烟弹的周围环境以使得所述周围环境界定小于约40%的相对湿度的程序代码指令。
在额外实施例中,一种用于存储由经构造以组装用于气溶胶递送装置的烟弹的控制器(例如,控制器417)中的处理器执行的计算机指令的非暂时性计算机可读媒体可以包括:用于抓住基座的程序代码指令;用于提供经构造以接合基座的多个组件的程序代码指令,所述组件提供于静止位置中;以及用于通过将基座引导为与处于静止位置中的组件接触而将所述组件耦接到基座的程序代码指令。用于抓住基座的程序代码指令可以包括用于抓住基座的经构造以接合控制主体的附接末端的内表面的程序代码指令。用于将基座引导为与处于静止位置中的组件接触的程序代码指令可以包括用于将基座向下引导为与所述组件接触的程序代码指令。所述计算机可读媒体可以进一步包括用于将基座插入到固定装置中的程序代码指令;以及用于检查通过所述固定装置耦接到基座的第一和第二加热端子的位置的程序代码指令。
得益于前述描述和相关联图式中呈现的教示的本公开所属领域的技术人员将想到本公开的许多修改和其它实施例。因此应理解,本公开不限于本文所公开的特定实施例,且修改和其它实施例既定包含在所附权利要求书的范围内。虽然本文采用特定术语,但这些术语是仅在一般且描述性意义上使用且不是用于限制的目的。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。