移动机器人的控制方法、装置、移动机器人和存储介质
1.本技术为2021年03月11日提交中国专利局、申请号为202110263046.2、发明名称为“移动机器人的控制方法、装置、移动机器人和存储介质”的中国专利申请的分案申请。
技术领域
2.本技术实施例涉及机器人技术领域,尤其涉及一种移动机器人的控制方法、装置、移动机器人和存储介质。
背景技术:
3.随着机器人技术的迅速发展,移动机器人的应用领域越来越广泛,为了实现对移动机器人在未知环境中的运动控制和导航,基于视觉的机器人障碍物识别倍受的关注,已成为近年来移动机器人的研究热点之一。
4.现有技术中,通过设置于移动机器人下部区域的激光雷达360
°
旋转扫描,识别周围空间中的障碍物,由于激光雷达距离地面通常有一定的高度,导致现有技术中的移动机器人无法获得路面信息,从而只能在平整的地面上运行。
5.因此,如何控制移动机器在具有上下坡的路段中运行成为现有技术中亟需解决的技术问题。
技术实现要素:
6.本技术实施例提供一种移动机器人的控制方法、装置、移动机器人和存储介质,使移动机器能够在具有上下坡的路段中运行。
7.第一方面,本技术实施例提供一种移动机器人的控制方法,所述移动机器人上安装有激光雷达和惯性测量单元,所述激光雷达用于测量所述激光雷达距离路面的距离,所述惯性测量单元用于测量所述移动机器人当前的俯仰角度,所述方法包括:
8.当所述激光雷达获得的距离信息发生有效距离变化时,获取所述激光雷达在第一位置测得的距离当前路面的固定距离和在第二位置测得的距离前方路段的测量距离;
9.根据所述固定距离、所述测量距离和所述激光雷达发射的光束的角度参数,预测前方路段相对所述移动机器人当前所在路面的倾斜角度;
10.基于所述倾斜角度和所述俯仰角度,确定前方路段的坡度;
11.根据所述坡度、所述坡度与所述移动机器人的坡度阈值的比较结果,控制所述移动机器人运动;
12.将所述前方路段在坡度地图上标记为坡度区域,所述坡度地图用于当所述移动机器人经过所述坡度区域,根据所述坡度区域,控制所述移动机器人发出爬坡警示信息。
13.可选地,所述获取所述激光雷达在第一位置测得的距离当前路面的固定距离和在第二位置测得的距离前方路段的测量距离,包括:
14.获取所述激光雷达发射的第一光束和第二光束在第一位置测得的距离当前路面的第一固定距离和第二固定距离;
15.获取所述激光雷达发射的第一光束和第二光束在第二位置测得的距离前方路段的第一测量距离和第二测量距离;
16.相应地,所述根据所述固定距离、所述测量距离和所述激光雷达发射的光束的角度参数,预测前方路段相对所述移动机器人当前所在路面的倾斜角度,包括:
17.根据所述第一固定距离、所述第二固定距离、所述第一测量距离、所述第二测量距离和所述第一光束与所述第二光束之间的夹角,计算所述前方路段相对当前路面的倾斜角度。
18.可选地,所述坡度阈值包括最大上坡角度和最小下坡角度,所述根据所述坡度、所述坡度与所述移动机器人的坡度阈值的比较结果,控制所述移动机器人运动,包括:
19.根据所述坡度的正负情况,确定所述前方路段的上下坡情况,所述上下坡情况为上坡路段或下坡路段;
20.若所述前方路段为上坡路段,则确定所述坡度是否小于所述最大上坡角度;
21.若所述坡度小于所述最大上坡角度,则控制所述移动机器人上坡。
22.可选地,所述控制所述移动机器人上坡,包括:
23.确定所述坡度与所述俯仰角度的大小关系,所述大小关系为大于、小于或等于;
24.若所述坡度大于所述俯仰角度,则增大所述移动机器人的牵引力;
25.若所述坡度小于所述俯仰角度,则增大所述移动机器人的速度;
26.若所述坡度等于所述俯仰角度,则保持所述移动机器人的牵引力和速度不变。
27.可选地,所述方法还包括:
28.若所述前方路段为下坡路段,则确定所述坡度是否大于所述最小下坡角度;
29.若所述坡度大于所述最小下坡角度,则控制所述移动机器人下坡。
30.可选地,所述方法还包括:
31.对所述激光雷达的测量距离大于距离阈值的数据进行去除,并对测量距离进行拟合获得所述距离信息。
32.可选地,所述爬坡警示信息包括语音提醒或灯光提醒。
33.可选地,所述方法还包括:
34.当所述移动机器人经过所述坡度区域时,若基于所述倾斜角度和所述俯仰角度,确定前方路段无坡度,则将该坡度区域进行更新。
35.第二方面,本技术实施例提供一种移动机器人的控制装置,包括:
36.坡度预测模块,用于当激光雷达获得的距离信息发生有效距离变化时,获取所述激光雷达在第一位置测得的距离当前路面的固定距离和在第二位置测得的距离前方路段的测量距离;根据所述固定距离、所述测量距离和所述激光雷达发射的光束的角度参数,预测前方路段相对所述移动机器人当前所在路面的倾斜角度;基于所述倾斜角度和惯性测量单元测得的俯仰角度,确定前方路段的坡度;
37.运动控制模块,用于根据所述坡度、所述坡度与所述移动机器人的坡度阈值的比较结果,控制所述移动机器人运动;将所述前方路段在坡度地图上标记为坡度区域,所述坡度地图用于当所述移动机器人经过所述坡度区域,根据所述坡度区域,控制所述移动机器人发出爬坡警示信息。
38.第三方面,本技术实施例提供一种移动机器人,包括:
39.激光雷达,用于测量所述激光雷达距离路面的距离;
40.惯性测量单元,用于测量所述移动机器人当前的俯仰角度;
41.数据处理中心,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一方面所述的移动机器人的控制方法。
42.第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一方面所述的移动机器人的控制方法。
43.本技术实施例提供的移动机器人的控制方法、装置、移动机器人和存储介质,通过当激光雷达获得的距离信息发生有效距离变化时,预测前方路段相对移动机器人当前所在路面的倾斜角度;基于所述倾斜角度和所述俯仰角度,确定前方路段的坡度;根据所述坡度、所述坡度与所述移动机器人设定的坡度阈值的比较结果,控制所述移动机器人运动;将所述前方路段在坡度地图上标记为坡度区域,所述坡度地图用于当所述移动机器人经过所述坡度区域,根据所述坡度区域,控制所述移动机器人发出爬坡警示信息,使移动机器能够在具有上下坡的路段中运行,提升了移动机器人性能,拓宽了移动机器人的应用场景。
附图说明
44.图1为本技术实施例的一种应用场景示意图;
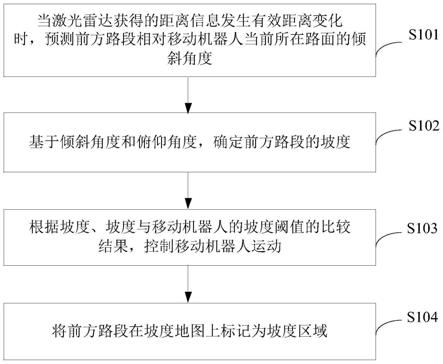
45.图2为本技术实施例一提供的移动机器人的控制方法的流程示意图;
46.图3为本技术实施例一提供的基于单线雷达的移动机器人的上坡示意图;
47.图4为本技术实施例一提供的基于单线雷达的移动机器人的下坡示意图;
48.图5为本技术实施例一提供的基于多线雷达的移动机器人的上坡示意图;
49.图6为本技术实施例一提供的基于多线雷达的移动机器人的下坡示意图;
50.图7为本技术实施例二提供的移动机器人的控制装置的结构示意图;
51.图8为本技术实施例三提供的一种移动机器人的结构示意图。
具体实施方式
52.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部结构。
53.本技术技术方案的主要思路:示例性地,图1为本技术实施例的一种应用场景示意图,如图1所示,移动机器人上安装有激光雷达和惯性测量单元(inertial measurement unit,imu),激光雷达和惯性测量单元均平行于移动机器人的底盘安装,激光雷达的出射光线与地面的夹角为θ,激光雷达用于测量激光雷达距离路面的距离,惯性测量单元用于测量移动机器人当前的俯仰角度,即当前路面的倾斜角度。本技术实施例提供一种控制移动机器人运动的技术方案,在机器人移动过程中,通过激光雷达持续探测距离前方路段的距离,由于激光雷达的安装位置及相对地面的角度固定,在地面平整的情况下,激光雷达测得的距离值近似为定值,当前方路段出现坡度时,距离值会发生变化,因此本实施例中通过对距离值进行监测,当监测到距离值发生变化时,获取imu测得的移动机器人的俯仰角度及激光雷达测得的距离值,根据俯仰角度和距离值,对前方路段的坡度进行预测,并根据预测结果
对控制移动机器人的运动,从而使移动机器人能够安全地通过上下坡路段,在现有移动机器人的硬件基础上,提升了移动机器人性能。
54.实施例一
55.图2为本技术实施例一提供的移动机器人的控制方法的流程示意图,本实施例的方法可以由本技术实施例所提供的移动机器人的控制装置执行,该装置可以由软件和/或硬件的方式来实现,并可集成于移动机器人中。如图2所示,本实施例的移动机器人的控制方法,包括:
56.s101、当激光雷达获得的距离信息发生有效距离变化时,预测前方路段相对移动机器人当前所在路面的倾斜角度。
57.示例性地,假设移动机器人在水平路面(当前路面)上运动时,激光雷达测得的距离用d0表示,当遇到上坡时,测得的距离d1<d0,当遇到下坡时,测得的距离d2>d0,相反,若移动机器人持续运动一段距离,测得的距离d均满足d<d0或d>d0,则可说明前方有斜坡,为保证机器人能够顺利通过斜坡,本步骤中,需要对前方路段相对当前路面的倾斜角度进行预测。
58.其中,有效距离变化,可用于确定路面是否发生坡度变化的距离变化,一方面,是指超过一定范围或数量级的变化,如厘米级,对于一些小于设定阈值或数量级的微小的变化可以忽略不计;另一方面,是持续测量几次(如大于3次)得到的距离值相对于一个相对固定的距离值的变化,如假设激光雷达的采样周期为1s,在机器人运动的0
‑
5min中,测得的距离均为d0,从第5min开始,持续测得的10个距离值均小于d0,则确定激光雷达测得的距离发生了有效距离变化,若持续测得的2个距离值小于d0,之后持续测得的距离值又恢复为d0,则可以忽略该变化。
59.可选地,本步骤中,可以通过对激光雷达测得的距离中的异常点(如距离值大于10*d0的测量距离)进行算法剔除,因为机器人的场景基本确定,如果测得距离远大于和平面路段的距离,则大概率发生激光没有照射到路面或者被地面异物造成光线干扰,导致测量结果异常,对测量距离进行拟合获得距离信息,再根据处理结果判断是否发生有效距离变化。从而提高对坡度的判断的准确性。
60.可选地,本步骤中,当激光雷达测得的距离信息发生有效距离变化时,通过获取激光雷达在第一位置测得的距离当前路面的固定距离和在第二位置测得的距离前方路段的测量距离,并根据该固定距离和测量距离,计算前方路段相对当前路面的倾斜角度。
61.具体地,当确定激光雷达测得的距离发生有效距离变化时,从发生有效距离变化之前,激光雷达进行距离测量的位置中选取一个位置,作为第一位置,并获取激光雷达在第一位置测量的距离值,得到固定距离,从发生有效距离变化之后,激光雷达进行距离测量的位置中选取一个位置,作为第二位置,并获取激光雷达在第二位置测量的距离值,得到测量距离,再将固定距离和测量距离的实际数值,代入预先设计的算法中进行求解,得到前方路段相对当前路面的倾斜角度。
62.由于本技术实施例中的激光雷达可以为单线雷达,也可以为多线雷达,为此本技术实施例中针对单线雷达和多线雷达设计了不同算法,对倾斜角度进行预测,以满足对安装有不同激光雷达的移动机器人的控制需求。
63.(1)单线雷达
64.确定所述移动机器人从第一位置移动到第二位置的位移;根据位移、固定距离、测
量距离和光线发射角,计算前方路段相对当前路面的倾斜角度,其中,光线发射角是激光雷达发射的光束与路面的夹角(图1中的θ)。
65.a、上坡方案
66.示例性地,图3为本技术实施例一提供的基于单线雷达的移动机器人的上坡示意图,假设移动机器人在当前路面上行驶过程中,激光雷达在第一位置(p点)测得的距离当前路面的距离(固定距离)表示为d0,在第二位置(q点)测得的距离前方路段的距离(测量距离)表示为d1,移动机器人从第一位置运动到第二位置的位移用s表示,光线发射角为θ,即pq=s,pb=d0,qa=d1。
67.在平行四边形pqcb中,由平行四边形法则,可知:bc=pq=s,ac=qc
‑
qa=pb
‑
qa=s
‑
d1,∠α=∠θ;
68.在三角形abc中,由余弦定理和正弦定理,可知:
69.ab2=bc2 ac2‑
2*bc*ac*cosα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
70.ab/sinα=ac/sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
71.将bc、ac、α值代入上述公式(1)和(2)中,进行求解,就可以得到β,β即为前方路段相对当前路面的倾斜角度的数值。
72.对于β的正负,若固定距离大于测量距离,则β取正,若固定距离小于测量距离,则β取负,如在图3中,当边pb大于qa,则β取正;当边pb小于qa,则β取负。
73.b、下坡方案
74.示例性地,图4为本技术实施例一提供的基于单线雷达的移动机器人的下坡示意图,假设移动机器人在当前路面上行驶过程中,激光雷达在第一位置(p点)测得的距离当前路面的距离(固定距离)表示为d0,在第二位置(q点)测得的距离前方路段的距离(测量距离)表示为d2,移动机器人从第一位置运动到第二位置的位移用s表示,光线发射角为θ,即pq=s,pb=d0,qa=d2,bc=pq=s,qc=pb=d0,ac=qa
‑
qc=qc
‑
qa=d2‑
d0,∠α=180
°‑
∠θ。
75.在三角形abc中,由余弦定理和正弦定理,可知:
76.ab2=bc2 ac2‑
2 bc*ac*cosα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
77.ab/sinα=ac/sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
78.将bc、ac、α值代入上述公式(3)和(4)中,进行求解,就可以得到β,β即为前方路段相对当前路面的倾斜角度的数值。
79.β的正负定义与前述相同,此处不再赘述。
80.需要说明的是,在一种可能的实施方式中,上述单线雷达的上坡方案和下坡方案中,p点为坡道变化交点对应的移动机器人的位置。
81.由于移动机器人在运行过程中,激光雷达会按照一定的频率实时采集距离地面的距离信息,得到许多的距离数据及对应的移动机器人的位置数据,因此,通过对这些距离数据进行分析,识别出坡道变化交点,如图3
‑
4中的b点,就得到坡道变化交点对应的移动机器人的位置,通过以该位置作为p点,并采用上述对应的计算方法,就可以计算出前方路段相对当前路面的倾斜角度。
82.(2)多线雷达
83.获取激光雷达发射的第一光束和第二光束在第一位置测得的距离当前路面的第一固定距离和第二固定距离;获取激光雷达发射的第一光束和第二光束在第二位置测得的
距离前方路段的第一测量距离和第二测量距离;根据第一固定距离、第二固定距离、第一测量距离、第二测量距离和光束夹角,计算前方路段相对当前路面的倾斜角度,其中,光束夹角是第一光束与第二光束之间的夹角。
84.a、上坡方案
85.示例性地,图5为本技术实施例一提供的基于多线雷达的移动机器人的上坡示意图,假设移动机器人在当前路面上行驶过程中,在第一位置(p点)处,激光雷达发射的第一光束和第二光束测得的距离当前路面的距离(固定距离)表分别为l1和l2,第一光束和第二光束之间的夹角(光束夹角)为θ,在第二位置(q点)处,激光雷达发射的第一光束和第二光束测得的距离前方路段的距离测分别为s1和s2,光束夹角不变,即qb=s1,qa=s2,qm=l1,qn=l2,∠aqb=∠nqm=∠θ,∠qmc=∠qba=∠α,∠cmn=∠adn=∠β。
86.在三角形qab中,由余弦定理和正弦定理,可知:
87.ab2=qa2 qb2‑
2*qa*qb*cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
88.ab/sinθ=qa/sinα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
89.将qa、qb、θ值代入上述公式(5)和(6)中,就可以求出α;
90.在三角形qmn中,由余弦定理和正弦定理,可知:
91.mn2=qm2 qn2‑
2*qm*qn*cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
92.mn/sinθ=qn/sinγ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
93.γ=α β
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
94.将qm、qn和α代入上述公式(7)
‑
(9)中,进行求解,就可以得到β,β即为前方路段相对当前路面的倾斜角度的数值。
95.β的正负定义与前述相同,此处不再赘述
96.b、下坡方案
97.示例性地,图6为本技术实施例一提供的基于多线雷达的移动机器人的下坡示意图,假设移动机器人在当前路面上行驶过程中,在第一位置(p点)处,激光雷达发射的第一光束和第二光束测得的距离当前路面的距离(固定距离)表分别为l1和l2,第一光束和第二光束之间的夹角(光束夹角)为θ,在第二位置(q点)处,激光雷达发射的第一光束和第二光束测得的距离前方路段的距离测分别为s1和s2,光束夹角不变,即qm=s1,qn=s2,qb=l1,qa=l2,∠aqb=∠nqm=∠θ,∠qmc=∠qba=∠α,∠cmn=∠adn=∠β。
98.在三角形qab中,由余弦定理和正弦定理,可知:
99.ab2=qa2 qb2‑
2*qa*qb*cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
100.ab/sinθ=qa/sinα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
101.将qa、qb、θ值代入上述公式(10)和(11)中,就可以求出α;
102.在三角形qmn中,由余弦定理和正弦定理,可知:
103.mn2=qm2 qn2‑
2*qm*qn*cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
104.mn/sinθ=qn/sinγ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
105.γ=α β
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
106.将qm、qn和α代入上述公式(12)
‑
(14)中,进行求解,就可以得到β,β即为前方路段相对当前路面的倾斜角度的数值。
107.β的正负定义与前述相同,此处不再赘述。
108.s102、基于倾斜角度和俯仰角度,确定前方路段的坡度。
109.本步骤中,根据s101计算得到的倾斜角度和imu测得的俯仰角度,确定前方路段的坡度,其中,前方路段的坡度是指前方路段相对水平路面的倾斜角度,坡度也有正负,坡度为正,表示前方路段为上坡路段,坡度为负,表示前方路段的为下坡路段。
110.可选地,本实施例中,通过如下公式确定前方路段的坡度:
111.σ=β δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
112.其中,σ表示坡度,δ表示俯仰角度,β表示倾斜角度。
113.可以理解的是,俯仰角度δ也有正负之分,当移动机器人当前所在路面为上坡路段时,δ为正,当移动机器人当前所在路面为下坡路段时,δ为负。
114.s103、根据坡度、坡度与移动机器人的坡度阈值的比较结果,控制移动机器人运动。
115.本步骤中,根据s102中确定的前方路段的坡度和移动机器人的爬坡性能,确定是机器人是否能够继续前行,若能继续前行,则控制移动机器人上坡或下坡,若不能继续前行,则控制控制移动制动或原路返回。
116.其中,爬坡能力是根据移动机器人的硬件条件和机械性能确定的移动机器人上下坡能力,可以通过坡度阈值或最大输出动能等来进行描述。
117.以坡度阈值为例,假设坡度阈值包括最大上坡角度和最小下坡角度,本实施例中,首先,根据坡度的正负情况,确定前方路段的上下坡情况,若坡度为正,则说明前方路段为上坡路段;若坡度为负,则说明前方路段为下坡路段;若坡度为零,则说明前方为水平路段;进一步地,根据前方路段的上下坡情况,控制移动机器人上坡或下坡,具体地:
118.(1)若前方路段为上坡路段,则确定该坡度是否小于最大上坡角度,若否,则说明前方路段的坡度超过了移动机器上的爬坡能力,若继续上坡,则有可能出现滑倒等安全事故,应控制移动机器人制动或原路返回,若是,则控制移动机器人上坡。
119.本实施例中,可以根据坡度的变化情况,对移动机器的速度或牵引力等进行控制,以控制移动机器人安全、高效地上坡。在一种可能的实施方式中,本实施例中,确定坡度与俯仰角度的大小关系,大小关系为大于、小于或等于,若坡度大于俯仰角度,则说明坡度变陡,需要增大移动机器人的牵引力,以保证移动机器人能够顺利上坡,若坡度小于俯仰角度,则说明坡度变缓,可以适当增大移动机器人的速度,以使移动机器人快速通过,若坡度等于俯仰角度,则说明坡度没有发生变化,可以保持移动机器人的牵引力和速度不变。
120.(2)若前方路段为下坡路段,则确定该坡度是否小于最小下坡角度,若否,则说明前方路段的坡度超过了移动机器上的爬坡能力,若继续下坡,则有可能出现滑倒等安全事故,应控制移动机器人制动或原路返回,若是,则控制移动机器人下坡。
121.本实施例中,可以根据坡度的变化情况,对移动机器的速度或牵引力等进行控制,以控制移动机器人安全、高效地下坡。在一种可能的实施方式中,本实施例中,确定坡度与俯仰角度的大小关系,大小关系为大于、小于或等于,若坡度大于俯仰角度,则说明坡度变缓,可以适当增大移动机器人的牵引力,以保证移动机器人移动所需的动力,若坡度小于俯仰角度,则说明坡度变陡,需要减小移动机器人的速度,以保证移动机器人的安全,若坡度等于俯仰角度,则说明坡度没有发生变化,可以保持移动机器人的牵引力和速度不变。
122.(3)若前方路段为水平路段,则确定该坡度与俯仰角度的大小关系,大小关系为大
于或小于,若该坡度大于俯仰角度,则可以减小移动机器人的牵引动力,为移动机器提供满足水平路段运行所需的动力即可,若坡度小于俯仰角度,则可以适当增加移动机器人的速度,以保证移动机器人的可以快速通过水平路段。
123.需要说明的是,上述实施方式中,俯仰角度、倾斜角度和坡度均是带正负号的,因此,在比较大小时,也是在带有正负号的情况下进行比较的。
124.s104、将前方路段在坡度地图上标记为坡度区域。
125.本实施例中的移动机器人具有坡度信息学习能力,在移动机器人行走过程中,设置于移动机器人中的数据处理中心可以根据经过路段的坡度情况,生成坡度地图,坡度地图上包括坡度区域、水平路段区域或未标记区域等,当移动机器人经过所述坡度区域,根据坡度区域,控制移动机器人发出爬坡警示信息,爬坡警示信息可以为语音提醒或灯光提醒等,如“注意机器人上坡,请注意避让”,从而达到提醒行人的目的,以保障道路通行安全。
126.可以理解的是,由于施工等原因,地面的坡度也是动态变化的,因此,当移动机器人经过坡度地图上标记的某坡度区域时,若基于测得的倾斜角度和俯仰角度,确定前方路段实际没有坡度,则对坡度地图上的坡度区域进行更新,从而提高坡度地图的准确性和实用性,进而提高移动机器人的控制准确性。
127.可选地,对于坡度区域还可以在坡度地图上标记坡度值、上下坡、斜坡长度等坡度信息。从而可以根据坡度地图和定位技术,当发现移动机器人经过坡度区域时,根据坡度信息控制移动机器人运动,以使移动机器人提前调整运行速度提高移动机器人的智能化程度。
128.本实施例中,通过当激光雷达获得的距离信息发生有效距离变化时,预测前方路段相对移动机器人当前所在路面的倾斜角度;基于所述倾斜角度和所述俯仰角度,确定前方路段的坡度;根据所述坡度、所述坡度与所述移动机器人设定的坡度阈值的比较结果,控制所述移动机器人运动;将所述前方路段在坡度地图上标记为坡度区域,所述坡度地图用于当所述移动机器人经过所述坡度区域,根据所述坡度区域,控制所述移动机器人发出爬坡警示信息,使移动机器能够在具有上下坡的路段中运行,提升了移动机器人性能,拓宽了移动机器人的应用场景。
129.实施例二
130.图7为本技术实施例二提供的移动机器人的控制装置的结构示意图,如图7所示,本实施例中移动机器人的控制装置10包括:
131.坡度预测模块11和运动控制模块12。
132.坡度预测模块11,用于当所述激光雷达获得的距离信息发生有效距离变化时,预测前方路段相对所述移动机器人当前所在路面的倾斜角度;基于所述倾斜角度和惯性测量单元测得的俯仰角度,确定前方路段的坡度;
133.运动控制模块12,用于根据所述坡度、所述坡度与所述移动机器人的坡度阈值的比较结果,控制所述移动机器人运动;将所述前方路段在坡度地图上标记为坡度区域,所述坡度地图用于当所述移动机器人经过所述坡度区域,根据所述坡度区域,控制所述移动机器人发出爬坡警示信息。
134.可选地,坡度预测模块11具体用于:
135.获取所述激光雷达在第一位置测得的距离当前路面的固定距离和在第二位置测
得的距离前方路段的测量距离;
136.根据所述固定距离和所述测量距离,计算所述前方路段相对当前路面的倾斜角度。
137.可选地,所述激光雷达为单线雷达,坡度预测模块11具体用于:
138.确定所述移动机器人从所述第一位置移动到所述第二位置的位移;
139.根据所述位移、所述固定距离、所述测量距离和光线发射角,计算所述前方路段相对当前路面的倾斜角度,所述光线发射角是所述激光雷达发射的光束与路面的夹角。
140.可选地,所述激光雷达为多线雷达,坡度预测模块11具体用于:
141.获取所述激光雷达发射的第一光束和第二光束在第一位置测得的距离当前路面的第一固定距离和第二固定距离;
142.获取所述激光雷达发射的第一光束和第二光束在第二位置测得的距离前方路段的第一测量距离和第二测量距离;
143.相应地,所述根据所述固定距离和所述测量距离,计算所述前方路段相对当前路面的倾斜角度,包括:
144.根据所述第一固定距离、所述第二固定距离、所述第一测量距离、所述第二测量距离和光束夹角,计算所述前方路段相对当前路面的倾斜角度,所述光束夹角是所述第一光束与所述第二光束之间的夹角。
145.可选地,所述坡度阈值包括最大上坡角度和最小下坡角度,运动控制模块12具体用于:
146.根据所述坡度的正负情况,确定所述前方路段的上下坡情况,所述上下坡情况为上坡路段或下坡路段;
147.若所述前方路段为上坡路段,则确定所述坡度是否小于所述最大上坡角度;
148.若所述坡度小于所述最大上坡角度,则控制所述移动机器人上坡。
149.可选地,运动控制模块12具体用于:
150.确定所述坡度与所述俯仰角度的大小关系,所述大小关系为大于、小于或等于;
151.若所述坡度大于所述俯仰角度,则增大所述移动机器人的牵引力;
152.若所述坡度小于所述俯仰角度,则增大所述移动机器人的速度;
153.若所述坡度等于所述俯仰角度,则保持所述移动机器人的牵引力和速度不变。
154.可选地,运动控制模块12还用于:
155.若所述前方路段为下坡路段,则确定所述坡度是否大于所述最小下坡角度;
156.若所述坡度大于所述最小下坡角度,则控制所述移动机器人下坡。
157.可选地,运动控制模块12具体用于:
158.确定所述坡度与所述俯仰角度的大小关系,所述大小关系为大于、小于或等于;
159.若所述坡度大于所述俯仰角度,则增大所述移动机器人的牵引力;
160.若所述坡度小于所述俯仰角度,则减小所述移动机器人的速度;
161.若所述坡度等于所述俯仰角度,则保持所述移动机器人的牵引力和速度不变。
162.可选地,运动控制模块12还用于:
163.对所述激光雷达的测量距离大于距离阈值的数据进行去除,并对测量距离进行拟合获得所述距离信息。
164.可选地,所述爬坡警示信息包括语音提醒或灯光提醒。
165.可选地,运动控制模块12还用于:
166.当所述移动机器人经过所述坡度区域时,若基于所述倾斜角度和所述俯仰角度,确定前方路段无坡度,则将该坡度区域进行更新。
167.本实施例所提供的移动机器人的控制装置可执行上述方法实施例所提供的移动机器人的控制方法,具备执行方法相应的功能模块和有益效果。本实施例的实现原理和技术效果与上述方法实施例类似,此处不再一一赘述。
168.实施例三
169.图8为本技术实施例三提供的一种移动机器人的结构示意图,如图8所示,该移动机器人20包括:
170.激光雷达21、惯性测量单元22和数据处理中心23。激光雷达21、惯性测量单元22分别与数据处理中心23通信连接,以将采集的数据发送给数据处理中心23。
171.其中,激光雷达21可以为单线激光雷达,也可以为多线激光雷达。激光雷达平行于移动机器人的底盘安装,激光雷达发出的光束与水平地面呈固定夹角,用以测量所述激光雷达距离路面的距离。
172.惯性测量单元22,是通过加速度计和陀螺仪测量运动载体的方位与姿态的装置,本实施例中,惯性测量单元用于测量移动机器人当前的俯仰角度,即移动机器人相对水平面的倾斜角度。
173.数据处理中心23,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如实施例一所述的移动机器人的控制方法。数据处理中心23中处理器的数量可以是一个或多个,处理器、存储器可以通过总线或其他方式连接。
174.存储器作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序以及模块,如本技术实施例中的坡度预测模块11运动控制模块12对应的程序指令/模块。处理器通过运行存储在存储器中的软件程序、指令以及模块,从而移动机器人的各种功能应用以及数据处理,即实现上述的移动机器人的控制方法。
175.存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序;存储数据区可存储根据终端的使用所创建的数据等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实例中,存储器可进一步包括相对于处理器远程设置的存储器,这些远程存储器可以通过网格连接至移动机器人。上述网格的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
176.实施例四
177.本技术实施例五还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在由计算机处理器执行时用于执行一种移动机器人的控制方法,该方法包括:
178.当所述激光雷达获得的距离信息发生有效距离变化时,预测前方路段相对所述移动机器人当前所在路面的倾斜角度;
179.基于所述倾斜角度和惯性测得单元测得的俯仰角度,确定前方路段的坡度;
180.根据所述坡度、所述坡度与所述移动机器人的坡度阈值的比较结果,控制所述移
动机器人运动;
181.将所述前方路段在坡度地图上标记为坡度区域,所述坡度地图用于当所述移动机器人经过所述坡度区域,根据所述坡度区域,控制所述移动机器人发出爬坡警示信息。
182.当然,本技术实施例所提供的一种包计算机可读存储介质,其计算机程序不限于如上所述的方法操作,还可以执行本技术任意实施例所提供的移动机器人的控制方法中的相关操作。
183.通过以上关于实施方式的描述,所属领域的技术人员可以清楚地了解到,本技术可借助软件及必需的通用硬件来实现,当然也可以通过硬件实现,但很多情况下前者是更佳的实施方式。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如计算机的软盘、只读存储器(read
‑
only memory,rom)、随机存取存储器(random access memory,ram)、闪存(flash)、硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网格设备等)执行本技术各个实施例所述的方法。
184.值得注意的是,上述移动机器人的控制装置的实施例中,所包括的各个单元和模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本技术的保护范围。
185.注意,上述仅为本技术的较佳实施例及所运用技术原理。本领域技术人员会理解,本技术不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本技术的保护范围。因此,虽然通过以上实施例对本技术进行了较为详细的说明,但是本技术不仅仅限于以上实施例,在不脱离本技术构思的情况下,还可以包括更多其他等效实施例,而本技术的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

