用于评估可远程控制的物料搬运车辆的车辆参数的系统和方法
相关申请的交叉引用
1.本技术基于2020年3月6日提交的题为“用于评估可远程控制的物料搬运车辆的车辆参数的系统和方法(systems and methods for evaluation of vehicle parameters of a remotely controllable material handling vehicle)”的美国临时专利申请no.62/986,299,并要求其优先权。关于联邦资助研究的说明
2.不适用。
背景技术:
3.仓库通常使用物料搬运车辆,具体地,操作员可以使用远程控制设备来控制物料搬运车辆在仓库内的行驶。
技术实现要素:
4.本公开大体涉及物料搬运车辆,并且更具体地,涉及在手动操作模式和行驶请求模式之间可切换的可远程控制的物料搬运车辆。
5.根据本公开的一些方面,提供了一种用于在手动模式和行驶请求模式之间可切换的可远程控制的物料搬运车辆的系统。该系统可以包括控制器,该控制器包括处理器和存储器,其中由该控制器先前评估的车辆状况数据可以存储在该存储器中。在一些方面,远程控制设备可以与该控制器进行通信,其中该远程控制设备上的行驶控制功能可以被配置为当该物料搬运车辆处于该行驶请求模式时,向该控制器提供行驶请求以使得该物料搬运车辆朝前移动。在一些方面,该控制器可以被配置为:接收该行驶请求;调用存储在该存储器中的至少一个先前评估的车辆状况数据;以及基于存储在该存储器中的该至少一个车辆状况数据,命令该物料搬运车辆朝前移动。
6.根据本公开的一些方面,提供了一种用于可远程控制的物料搬运车辆的系统。可以手动模式和行驶请求模式操作该物料搬运车辆,在该手动模式中操作员可正常地操控该物料搬运车辆,并且在该行驶请求模式中该操作员可远程地请求该物料搬运车辆朝前移动。该系统包括控制器,该控制器包括处理器和存储器,以及远程控制设备,该远程控制设备与该控制器进行通信。该控制器被配置为:连续地接收要存储在该存储器中的车辆状况数据;从该远程控制设备接收行驶请求;从该存储器中调用所存储的车辆状况数据;以及基于该所存储的车辆状况数据,命令该物料搬运车辆朝前移动。
7.根据本公开的一些方面,提供了一种用于以行驶请求模式远程地操作物料搬运车辆的方法。该方法可以包括:从与该物料搬运车辆进行通信的远程控制设备接收行驶请求;调用至少一个先前评估的车辆状况,以确定至少一个车辆状况是否适合于使该物料搬运车辆朝前移动;以及在确定该至少一个车辆状况合适时,命令该物料搬运车辆朝前移动。
8.本公开的先前以及其他方面和优点将根据以下描述而显现。在说明书中,参考了
形成其一部分且通过图示的方式示出了本公开的优选配置的附图。然而,此类配置并不一定表示本公开的全部范围,并因此参考权利要求书和本文以解释本公开的范围。
附图说明
9.当考虑到以下的具体实施方式时,本发明将会更好地被理解,并且除了上文阐述的那些特征、方面和优点之外的特征、方面和优点将变得显而易见。此类具体实施方式参考了以下附图。
10.图1是根据本公开的各方面的物料搬运车辆的非限制性示例的俯视、正视、左视等距视图。
11.图2是图1的物料搬运车辆的俯视、左侧视图。
12.图3是根据本公开的各方面的用于可远程控制的物料搬运车辆的系统的示意图。
13.图4是根据本公开的各方面的连续评估循环的方法的示意图。
14.图5是切换物料搬运车辆的操作模式的方法的示意图。
15.图6是在行驶请求模式下操作物料搬运车辆的方法的示意图。
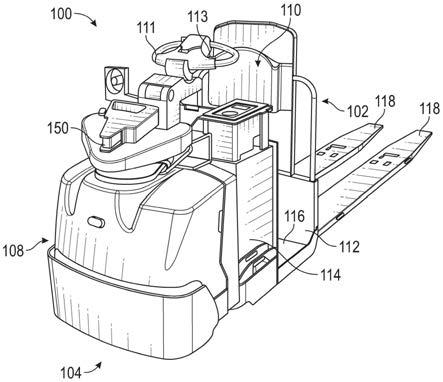
16.图7是与图1的物料搬运车辆进行通信的操作员控制的远程控制设备的示例性图示。
具体实施方式
17.在详细解释本公开的任何方面之前,应当理解的是,本公开在其应用上不限于在以下说明书中阐述的或在以下附图中示出的构造细节和部件布置。本公开能够具有其他配置,并且能够以各种方式实践或执行。而且,应当理解的是,本文所使用的措辞和术语是为了描述的目的并且不应被视为限制性的。在本文中,“包括(including)”、“包括(comprising)”或“具有(having)”及其变体的使用意味着涵盖之后列出的条目和它们的等效物以及附加的条目。除非另外指定或限制,术语“安装”、“连接”、“支撑”和“耦合”及其变体被广泛地使用,并且涵盖直接和间接的安装、连接、支撑和耦合。此外,“连接”和“耦合”不仅限于物理的或机械的连接或耦合。
18.还应当理解的是,本文中使用诸如“第一”、“第二”等的指定的对元素的任何引述不限制这些元素的数量或次序,除非明确阐明此类限制。确切而言,这些指定可以在本文中用作区分两个或更多个元素或者元素实例的便捷方法。因此,对第一元素和第二元素的引述并不意味着这里仅可以采用两个元素或者第一元素必须以某种方式位于第二元素之前。
19.提供以下讨论以使本领域技术人员能够作出和使用本公开的各方面。对所示配置的各种修改对于本领域的技术人员而言将是显而易见的,并且本文中的一般原理可以应用于其他配置和应用中而不脱离本公开的各方面。因此,本公开的各方面并不旨在限于所示的配置,而是将被赋予与本文所公开的原理和特征相一致的最广泛的范围。参考附图阅读以下具体实施方式,其中不同附图中的相同要素具有相同的附图标记。不一定按比例绘制的附图描绘了所选的配置并且不旨在限制本公开的范围。本领域技术人员将认识到,本文中提供的非限制性示例具有许多有用的替代方案并且落入本公开的范围内。
20.应当理解的是,物料搬运车辆被设计为各种配置以执行各种任务。本文所描述的物料搬运车辆的各种配置以示例的方式示出。对于本领域技术人员来说将显而易见的是,
本发明不限于这些类型的车辆,并且还可以在各种其他类型的物料搬运车辆配置中提供,包括例如,订单拣选车(order picker)、前移式车辆(reach vehicle)、平衡车辆(counterbalanced vehicle)和任何其他物料搬运车辆。本文中所公开的各个方面适合用于驾驶员控制的、行人控制的、远程控制的和自主控制的物料搬运车辆中的全部。
21.图1和图2示出了根据本公开的物料搬运车辆100(“mhv”)的一个非限制性示例。物料搬运车辆100可以包括车辆框架102、牵引轮104、动力部分108和操作员舱110。动力部分108可以被设置在车辆框架102内,并且可以包括被配置为向物料搬运车辆100的各种部件供电的电池(未示出)。例如,电池可以向被设置在动力部分108内并被配置为驱动牵引轮104的电机(未示出)和/或变速器(未示出)供电。在所示的非限制性示例中,牵引轮104被布置在动力部分108下面。在其他非限制性示例中,牵引轮104可以被布置在车辆框架102下面的另一个位置中。
22.操作员舱110可以包括控制手柄111,该控制手柄111被配置为向操作员提供用户界面并允许操作员控制物料搬运车辆100行驶的速度和方向。在一些非限制性示例中,控制手柄111可以被配置为手动转向并控制到牵引轮104的功率。
23.在图1和图2所示的非限制性示例中,物料搬运车辆100包括被布置在动力部分108后面并且具有朝向物料搬运车辆100的横向侧面114打开的操作员开口112的操作员舱110。操作员舱110还可以包含地板垫116,物料搬运车辆100的操作员可以站在该地板垫116上。在一些非限制性示例中,物料搬运车辆100可以被设计为具有被不同地布置的操作员舱,例如,具有朝后打开的操作员开口112。在所示的非限制性示例中,物料搬运车辆100包括一对货叉118,该对货叉118可以响应于来自控制手柄111的命令而经由致动器(未示出)被升高或降低。
24.在图2所示的非限制性示例中,物料搬运车辆100还可以包括皮套119。皮套119可以,例如,附接到物料搬运车辆100的一部分。在所示的非限制性示例中,皮套119附接到物料搬运车辆100的横向侧面114。皮套119可以被配置为当远程控制设备122没有被操作员持有时临时持有或存储远程控制设备122。在一些实施例中,皮套119可以包括用于远程控制设备122的集成充电器121,使得远程控制设备122可以在被存储在皮套119中的同时被充电。在一些非限制性示例中,当操作员将远程控制设备122放置在皮套119中时,远程控制设备122可以与物料搬运车辆100解除配对。
25.图3示出了用于可远程控制的物料搬运车辆的系统120的一个非限制性示例,该系统120可以例如在图1所示的物料搬运车辆100中实现。系统120包括与物料搬运车辆100进行通信的远程控制设备122。远程控制设备122可由物料搬运车辆100的操作员操作,并且可以包括行驶控制功能124和i/o功能126。行驶控制功能124和i/o功能126可以被配置为第一和第二可手动操作功能,该第一和第二可手动操作功能可以通过,例如,位于远程控制设备122上的按钮或切换器来操作。例如,行驶控制功能124可以通过远程控制设备122上的第一按钮125来操作,并且i/o功能126可以通过远程控制设备122上的第二按钮127来操作(参见图7)。行驶控制功能124和i/o功能126可以与远程控制设备122内的发射器128进行电通信。远程控制设备122上的发射器128可以经由位于物料搬运车辆100上的接收器130与物料搬运车辆100无线通信,如虚线132所表示的。在一些非限制性示例中,远程控制设备122可以在几分钟的不活动之后关闭。
26.如将在本文中所描述的,行驶控制功能124可以被配置为将第一信号从发射器128发送到位于物料搬运车辆100上的接收器130。第一信号可以被配置为当操作员操作远程控制设备122上的行驶控制功能124时,指示物料搬运车辆100在仓库内从一个位置朝前移动到下一个位置。例如,操作员可能期望物料搬运车辆100沿着仓库内的货架在过道中从一个拣选位置移动到下一个拣选位置,而无需操作员频繁地进入/离开物料搬运车辆100上的操作员舱110。相反,操作员可以从操作员舱110外部操作远程控制设备122上的行驶控制功能124,以移动物料搬运车辆100。也就是说,当由操作员致动时,行驶控制功能124向物料搬运车辆100提供朝前移动的请求。在一些非限制性示例中,可以通过将行驶控制功能124保持在致动状态来控制物料搬运车辆朝前移动的持续时间。例如,操作员可以通过按住并保持行驶控制功能124来控制物料搬运车辆100移动的持续时间。在一些非限制性示例中,在保持行驶控制功能124之后释放行驶控制功能124可以导致物料搬运车辆100停止朝前移动和/或滑行至停止。
27.在一些非限制性示例中,可以保持行驶请求功能124有限的持续时间(例如,在10秒之后,或大于或小于10秒之后),在此之后,物料搬运车辆100的行驶可以停止。在该特定的非限制性示例中,如果操作员需要“重置”该有限的持续时间,则行驶请求功能124的快速“释放并重新保持”(例如,在2.5秒内,或大于或小于2.5秒内)可以“重置”该有限的持续时间,而不会使物料搬运车辆100停止。
28.i/o功能126可以被配置为将第二信号从发射器128发送到位于物料搬运车辆100上的接收器130。在一些非限制性示例中,第二信号可以导致一系列事件发生,诸如将远程控制设备122与物料搬运车辆100解除配对,并使物料搬运车辆100停止朝前移动。例如,当由操作员致动时,i/o功能126将远程控制设备122与物料搬运车辆100解除配对。
29.物料搬运车辆100还可以包括车辆管理器134(“vm”)。在所示的非限制性示例中,车辆管理器可以与转向控制系统136和牵引控制器138进行电通信。车辆管理器134可以被配置为发出命令并控制转向控制系统136。例如,车辆管理器134可以向转向控制系统136发送信号以执行转向操控(maneuver)或发出转向命令。基于接收到的信号,转向控制系统136可以随后执行所发出的转向命令。车辆管理器134可以被配置为发出命令并控制牵引控制器138。例如,车辆管理器134可以向牵引控制器138发送信号以移动、定位、加速、减速,或以其他方式改变物料搬运车辆100的速度。牵引控制器138可以随后(例如,经由电通信)与制动器140或动力单元142通信以改变物料搬运车辆的速度。另外,车辆管理器134可以被配置为根据转向控制系统136和牵引控制器138来评估车辆状况数据。在一个非限制性示例中,转向控制系统136可以感测(例如,经由传感器)物料搬运车辆100的转向角度。在另一个非限制性示例中,牵引控制器138可以感测(例如,经由传感器)物料搬运车辆100的速度。在任何一种情况下,物料搬运车辆100的感测到的转向角度或速度都可以被传递到车辆管理器134。
30.仍然参考图3,物料搬运车辆100还可以包括行驶请求控制器144(“trc”)。行驶请求控制器144可以具有存储器146和处理器148。存储器146可以被配置为存储可以由处理器148执行的多个可执行指令。另外,如将在本文中所描述的,处理器148可以执行连续评估循环,以连续地评估,例如,物料搬运车辆100的车辆状况数据,以及将其存储在存储器146中。处理器148可以被配置为使用存储在存储器146上的车辆状况数据来解读和执行计算。
31.行驶请求控制器144可以与接收器130进行电通信,使得接收器130可以从远程控制设备122上的发射器128接收第一信号和第二信号,并将该第一信号和第二信号传送到行驶请求控制器144以对该第一信号和第二信号进行解读。如将在本文中所描述的,行驶请求控制器144还可以与车辆管理器134进行电通信,使得可以在行驶请求控制器144和车辆管理器134之间发送或传递信号、命令和车辆数据。例如,行驶请求控制器144可以连续地(例如,约每20毫秒,或更多或更少地)将车辆命令信息传递到车辆管理器134。在一个非限制性示例中,可以经由过程数据对象(“pdo”)消息将车辆命令信息从行驶请求控制器144传送到车辆管理器134。从行驶请求控制器144连续地递送的车辆命令信息可以包括行驶命令(例如,车辆朝前运动的请求)、货叉118升高或降低命令、喇叭激活命令、停止命令和控制模式请求(例如,转换到手动模式或行驶请求模式/从手动模式或行驶请求模式转换的请求)。另外,当物料搬运车辆100处于行驶请求模式时,行驶请求控制器144可以向车辆管理器134发送转向命令,或者行驶请求控制器144可以通过车辆管理器134设置最大车辆速度限制或加速度限制(例如,在远程操作期间将物料搬运车辆的最大速度限制为步行速度等)。
32.物料搬运车辆100还可以具有传感器150(例如,位于车辆的前端处,参见图1
‑
图2)。在一个非限制性示例中,传感器150可以是飞行时间相机或2d或3d lidar扫描仪,然而还设想了其他具有障碍物检测能力的传感器,诸如本领域已知的任何其他障碍物检测传感器。传感器150可以与行驶请求控制器144进行电通信,并且可以被配置为感测或检测位于车辆的行驶路径中或附近的障碍物。在一个非限制性示例中,传感器150还可以被配置为检测沿着物料搬运车辆100的横向侧面114定位的货架。
33.现在参考图1
‑
图3,物料搬运车辆100可以被配置为在手动模式和行驶请求模式之间转换。在一个非限制性示例中,物料搬运车辆100可以具有切换器151(例如,可手动操作的切换器,参见图2),该切换器151可以位于操作员舱110内或操作员舱110附近以供物料搬运车辆100的操作员接取(access)。例如,切换器可以位于控制手柄111上、显示器115旁边或控制面板117上,并且可由操作员接取。在另一个非限制性示例中,切换器可以位于物料搬运车辆100的外侧上。例如,切换器可以位于物料搬运车辆100的横向侧面114中的一个或两个上或车辆框架102上。在另一个非限制性示例中,在远程控制设备122与物料搬运车辆100配对时,或在激活行驶控制功能124时,可以由行驶请求控制器144发起手动模式和行驶请求模式之间的转换。
34.既然已经描述了系统120的部件,那么将参考图1
‑
图3在下面的段落中描述远程控制的物料搬运车辆100的操作。当物料搬运车辆100处于手动模式时,操作员可以正常地操作物料搬运车辆100。例如,操作员可以使用物料搬运车辆100上的控制手柄111,通过使用位于控制手柄111上的油门或制动按钮/操纵杆来加速、减速、转向或以其他方式手动地操控物料搬运车辆100。在一个非限制性示例中,控制手柄111可以包括一个或多个点动按钮113,该一个或多个点动按钮113被配置为在接合时使物料搬运车辆100以步行速度行驶。在释放点动按钮113后,物料搬运车辆100可以滑行至停止。
35.当物料搬运车辆100处于手动模式时,远程控制设备122可以与物料搬运车辆100配对、解除配对、或以其他方式连接/断连。然而,由远程控制设备122生成的行驶或i/o命令(例如,分别为第一和第二信号)可以不由行驶请求控制器144执行或不被传递给车辆管理器134。例如,当物料搬运车辆100处于手动模式时,操作员不能够使用远程控制设备122来
操控物料搬运车辆100。根据一些实施例,由远程控制设备122递送的i/o命令仍然可以被发送到行驶请求控制器144以与远程控制设备122解除配对。
36.相反,当物料搬运车辆100处于行驶请求模式时,由远程控制设备122生成的行驶或i/o信号(例如,分别为第一和第二信号)经由行驶请求控制器144被传递到车辆管理器134。例如,当物料搬运车辆100处于行驶请求模式时,操作员可以使用行驶控制功能124使物料搬运车辆100朝前移动,并且可以使用远程控制设备122上的i/o功能126使物料搬运车辆100与远程控制设备122解除配对。附加地,当物料搬运车辆100处于行驶请求模式时,操作员不能够使用控制手柄111来操控物料搬运车辆100。例如,来自控制手柄111的转向或油门输入,包括来自点动按钮113的输入,可能不会被传递给车辆管理器134或被车辆管理器134忽略。例如,可以防止控制手柄111上的油门控制物料搬运车辆100的速度。在一些实施例中,点动按钮113可以维持功能。例如,当物料搬运车辆100处于行驶请求模式位置,并且远程控制设备122尚未配对时,点动按钮113可以维持功能。如果远程控制设备122随后与物料搬运车辆100配对,则点动按钮113可能不再起作用。在一些非限制性示例中,喇叭按钮(未示出)可以位于控制手柄111上,并且当物料搬运车辆100处于手动模式或行驶请求模式中的任一种时,喇叭按钮可以维持活跃并且可由操作员使用。当物料搬运车辆100处于行驶请求模式时,操作员可能也不能够使用控制手柄111来操控货叉118。例如,当远程控制设备122与物料搬运车辆100配对时,操作员可能无法操控(例如,升高或降低)货叉118。
37.现在参考图4,示出了连续评估循环200的示例性示意图。如本文先前所述,例如,连续评估循环200可以在物料搬运车辆100处于操作(例如,当物料搬运车辆100“开启”时,无论车辆处于何种模式)的同时,由处理器148以预定的离散时间间隔(例如,约每20毫秒到约每1秒,或大于1秒或小于20毫秒)连续地执行。当行驶请求控制器144从车辆管理器134接收到车辆状况数据时,连续评估循环200可以开始,如输入框202所示。在一个非限制性示例中,可以经由过程数据对象将车辆状况数据从车辆管理器134传递到行驶请求控制器144。在一个非限制性示例中,车辆状况数据可以包括物料搬运车辆100的转向角度和车辆速度中的一个或两个。例如,转向控制系统136可以感测物料搬运车辆100的转向角度,并且牵引控制器138可以感测物料搬运车辆100的速度。物料搬运车辆100的感测到的转向角度和速度可以被传递到车辆管理器134,并且车辆管理器134可以随后将车辆状况数据传递到行驶请求控制器144。
38.在另一个非限制性示例中,从车辆管理器134传递到行驶请求控制器144的车辆状况数据可以进一步包括物料搬运车辆100正在其中操作的当前模式(例如,手动模式或行驶请求模式)。在另一个非限制性示例中,车辆状况数据可以进一步包括制动器应用状态。例如,车辆管理器134可以通过牵引控制器138通信以确定制动器140的状态,并将该状态传递到行驶请求控制器144。
39.在步骤204处,行驶请求控制器144可以将车辆状况数据(例如,转向角度、车辆速度等)存储在行驶请求控制器144中的存储器146上。在步骤206处,行驶请求控制器144可以随后确定物料搬运车辆的车辆状况,诸如运动状况。例如,行驶请求控制器144可以确定物料搬运车辆100是否停止。例如,行驶请求控制器144可以使用从车辆管理器134接收的车辆速度或存储在存储器146中的车辆速度,并将车辆速度与为停止的车辆定义的阈值(例如,近似0mph)进行比较,以确定物料搬运车辆100的运动状况。在一个非限制性示例中,阈值可
以是0mph。如果行驶请求控制器144确定车辆速度大于阈值,则行驶请求控制器144(例如,在存储器146中)存储物料搬运车辆100处于“运动中”(或其他可以指示车辆未停止的表示性标志),如步骤208所指示的。相反,如果行驶请求控制器144确定车辆速度等于或小于阈值,则行驶请求控制器144存储物料搬运车辆100“停止”(或其他可以指示车辆已停止的表示性标志),如步骤210所指示的。
40.如前所述,连续评估循环200可以以离散的时间间隔连续地运行,这可以使得,例如,行驶请求控制器144的存储器146能够将近期和准确的车辆状况数据存储在该存储器146上。在一个非限制性示例中,可以由行驶请求控制器144约每20毫秒执行连续评估循环200。在另一个非限制性示例中,可以在约每秒、20毫秒到1秒之间的任何时间段、或者大于1秒或小于20毫秒的任何时间段执行连续评估循环200。本领域的普通技术人员容易地认识到,所选择的特定时间段可以是应用特定的,并且不旨在以任何方式限制。
41.如将在以下段落中更详细地描述的,行驶请求控制器144可以执行连续评估循环200,使得行驶请求控制器144可以在接收到由远程控制设备122上的行驶控制功能124或i/o功能126给出的行驶命令或停止命令时评估存储在存储器146中的最近的车辆状况数据。在一个非限制性示例中,只有最近的车辆状况数据可以存储在存储器146中。例如,当行驶请求控制器144执行连续评估循环200时,可以在存储器146中存储一个数据点并且然后连续地更新(例如,覆写)。在另一个非限制性示例中,车辆状况数据的历史可以存储在存储器146中。
42.现在参考图5,将会描述将物料搬运车辆100从手动模式切换到行驶请求模式的方法300。该过程可以从步骤302开始,在此处可以发起从手动模式转换到行驶请求模式的请求(例如,经由本文先前所述的方法中的一个)。在步骤304处,行驶请求控制器144随后可以调用存储在存储器146上的最近的车辆状况数据(例如,在先前的连续评估循环200执行时更新的车辆状况数据)中的至少一个,并确定所存储的车辆状况是否适合从手动模式转换到行驶请求模式。以此方式,行驶请求控制器144可以使用先前已更新的车辆状况数据和运动状况信息来确定车辆状况是否适合于转换模式。例如,行驶请求控制器144可以确保存储器146中存储的最近的运动状况是“停止”。另外,在一些非限制性示例中,在步骤304处,行驶请求控制器144还可以检查物料搬运车辆100的其他方面。例如,行驶请求控制器144可以查询车辆管理器134以确保在手动模式下操作物料搬运车辆100。行驶请求控制器144还可以检查以确保远程控制设备122上的i/o功能126当前没有被操作员致动。如果行驶请求控制器144确定车辆状况不适合从手动模式转换到行驶请求模式,则行驶请求控制器不采取动作并且继续评估车辆状况(例如,通过执行连续评估循环200)。
43.在步骤306处,当行驶请求控制器144基于先前存储的车辆状况数据确定车辆状况适合时,行驶请求控制器144可以随后向车辆管理器134发送信号,以请求从手动模式转换到行驶请求模式。在步骤308处,响应于从行驶请求控制器144发送到车辆管理器134的信号,车辆管理器134可以随后使得物料搬运车辆能够切换到行驶请求模式。当物料搬运车辆100处于行驶请求模式时,操作员使用远程控制设备122对物料搬运车辆100的远程操作随后被启用。例如,操作员可以使用远程控制设备122以将信号发送到行驶请求控制器144,如本文先前所述。行驶请求控制器144可以随后生成车辆命令,然后将那些车辆命令传递到车辆管理器134以供执行。
44.操作员可以将物料搬运车辆100从行驶请求模式切换回手动模式(例如,通过致动切换器151,参见图1)。根据一个非限制性示例,如果车辆管理器134检测到导致切换回手动模式的车辆状况,则车辆管理器134可以将物料搬运车辆从行驶请求模式切换回手动模式。
45.现在参考图3和图6,示出了当物料搬运车辆100处于行驶请求模式时,使用远程控制设备122远程操作物料搬运车辆100的方法400。在下文的示例性讨论中,将描述订单拣选操作的示例,其中物料搬运车辆100的操作员可能期望在仓库内的过道中并沿着货架从一个拣选位置移动到下一个拣选位置。本领域的普通技术人员容易地认识到,这只是操作的一个示例,并不旨在以任何方式限制。
46.方法400可以从步骤402开始,其中操作员可以致动远程控制设备122上的行驶控制功能124或i/o功能126中的一个,从而分别生成第一信号或第二信号。在步骤404处,发射器128可以经由与发射器128进行通信的接收器130将第一和/或第二信号无线地传递到行驶请求控制器144。
47.如果操作员致动行驶控制功能124,则在步骤406处,行驶请求控制器144可以随后调用存储在存储器146上的最近的车辆状况数据(例如,在先前/最近的连续评估循环200执行时更新的车辆状况数据)中的至少一个,并确定所存储的车辆状况是否适合于执行由远程控制设备122发出的行驶请求。例如,行驶请求控制器144可以确保存储器146中存储的最近的运动状况是“停止”。以此方式,行驶请求控制器144使用先前在确定车辆状况是否适合于行驶/停止命令时已更新的车辆状况数据和运动状况信息。
48.在步骤408处,在基于先前所存储的车辆状况数据确定车辆状况合适时,行驶请求控制器144随后可以基于在步骤404处接收到的信号向车辆管理器134发送请求(例如,车辆命令)。例如,如果操作员致动远程控制设备122上的行驶控制功能124(例如,通过按住远程控制设备122上的第一按钮125,参见图7),则行驶请求控制器144可以向车辆管理器134发送行驶命令,以指示物料搬运车辆100移动,或者以其他方式朝前行驶。根据另一个示例,如果操作员致动远程控制设备122上的i/o功能126,则解除配对命令被发送到行驶请求控制器144以请求物料搬运车辆100与远程控制设备122解除配对,并且停止命令可以从行驶请求控制器144被发送到车辆管理器134,以指示物料搬运车辆100停止。
49.在步骤410处,响应于接收到的命令,车辆管理器134可以与牵引控制器138通信以操作动力单元142,以使得物料搬运车辆100能够行驶或停止(例如,如果分别接收到行驶命令或停止命令)。例如,物料搬运车辆100可以位于仓库过道内的第一拣选位置处,并且操作员可以期望物料搬运车辆100行驶到该过道内的第二拣选位置。由车辆管理器134执行的行驶命令可以使物料搬运车辆能够从第一拣选位置朝前行驶到第二拣选位置。
50.当物料搬运车辆100行驶时,行驶请求控制器可以监控传感器150以确定物料搬运车辆100是否应当转向或停止。在传感器150提供物料搬运车辆100应当转向的指示的情况下,行驶请求控制器144可以向车辆管理器134发送转向命令以请求转向操控。响应于接收到的转向命令,车辆管理器134可以与转向控制系统136通信以操控物料搬运车辆100(例如,使物料搬运车辆100转向以沿着货架结构行驶)。在传感器150提供物料搬运车辆100应当停止的指示的情况下(例如,响应于检测到物料搬运车辆100的行驶路径中的障碍物),行驶请求控制器可以向车辆管理器134发送停止命令,以请求物料搬运车辆100停止。响应于接收到的停止命令,车辆管理器134可以与牵引控制器138通信以使物料搬运车辆100停止
(例如,如果传感器150检测到物料搬运车辆100的行驶路径中的障碍物,则使物料搬运车辆100停止)。
51.对于某些类型的车辆,有各种政府机构、法律、法规和条例规定的训练要求。例如,美国劳工部职业安全与健康管理局(osha)规定雇主有义务训练和监督各种类型的物料搬运车辆的操作员。还需要每三年重新认证一次。在某些实例中,必要时应向操作员提供相关主题的进修训练。在所有实例中,在执行任何动作期间,操作员维持对物料搬运车辆的控制。此外,仓库管理员维持对仓库环境内的物料搬运车辆的车队的控制。仓库管理员提供的对操作员的训练和监督要求有适当的操作实践,包括操作员维持对物料搬运车辆的控制、注意操作环境、以及始终注意行驶方向等。
52.在本说明书内,已经以使得能够书写清楚且简洁的说明书的方式描述了实施例,但是旨在并将被理解的是,实施例可以是以不同方式组合的或分离的而不背离本发明。例如,应当理解,本文所描述的所有优选特征都可适用于本文所描述的发明的所有方面。
53.因此,虽然已经结合特定实施例和示例描述了本发明,但是本发明不必受如此限制,并且许多其他实施例、示例、使用、修改以及对所述实施例、示例和使用的偏离旨在被所附权利要求所涵盖。本文引述的每一项专利和出版物的全部公开内容通过引用并入本文,如同每一项此类专利或出版物通过引用单独并入本文。
54.在所附权利要求中阐述了本发明的各种特征和优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

