1.本发明属于自动化技术与现代控制领域,尤其涉及一种港口船舶承载量饱和的疏运控 制方法。
背景技术:
2.海洋运输是国际物流中最主要的运输方式,其通过使用船舶在不同国家和地区的港口 之间运送货物。海洋运输的主要技术设备包括船舶、航道、港口及通信、导航等设施,港 口作为海洋运输重要的交通基础设施,是具有水陆联运设备以及条件以供船舶安全进出和 停泊的运输枢纽,是海上运输工具的汇集点。近年来,我国海洋运输持续保持着高速发展 的态势,越来越多的大型和超大型船舶被投入使用。随着船舶的大型化趋势以及港口货物 吞吐量的逐年增加,需要进港的船舶数量随之不断增多,但许多港口由于码头泊位容量有 限,不足以同时满足船舶停靠和作业。因此,为防止船舶在航道以及港口内过度集中、超 过港口泊位容量等情况发生,需要及时对进出港口的船舶进行管控,避免大量船舶在港口 中拥塞,进而提升港口运作的效率。
3.本发明主要是动态获取进出港船舶的流量值,根据通航环境和船舶流量的变化趋势, 在确保通航安全的前提下,对港口船舶进行动态调度,提出一种可靠的港口船舶疏运控制 方法,对船舶的进出港采取必要的控制措施,使港口具有完善与畅通的集疏运系统。
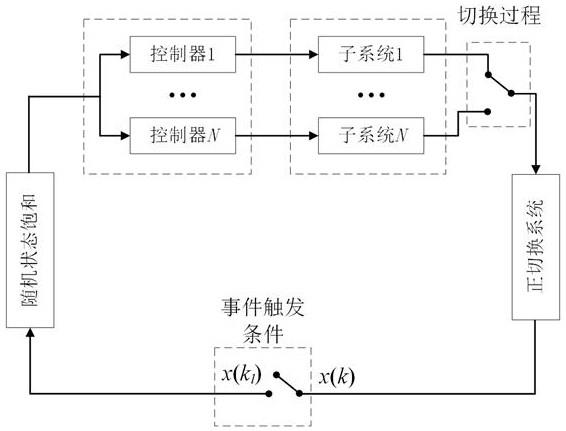
4.港内泊位的容量和进出港船舶的数量都是非负的,此时可利用非负变量来描述港口的 船流量。进而,用正系统对港口船舶疏运控制系统建模是合理的。同时考虑到切换系统在 多模系统中建模的有效性,用切换系统来描述这类由多个码头组成的港口船舶疏运控制系 统更为合适。图1给出了某港口的船舶进出港信息传输与控制过程示意图,其中,港口泊 位仅以a、b两个码头为例;图2是该发明中系统建模基于随机状态饱和的正切换系统的 事件触发控制框架示意图。由于部分港口受到自然条件约束或者考虑到航道建设费用使得 港内航道宽度受限、水深受限,船舶在狭水道内易发生碰撞、搁浅等事故,这些限制因素 往往会引起严重的船舶等候情况,船舶在港口的非作业时间延长,进而导致港口内船舶拥 塞。正如上海港,由于不确定的恶劣气候导致港口运作效率降低,船舶大量滞留在港内, 港内部分船舶无法及时驶离,且港口泊位容量有限,随着到港船舶数量不断增加,进而引 发严重的港口拥塞。因为各种不确定因素引起的港口拥塞现象具有随机性,此时,通过设 计事件触发条件能够有效解决港内船舶数量随机饱和的问题。事件触发控制策略是一种基 于事件的实时控制方法。在港内泊位容量即将饱和时,采用事件触发控制策略,可以迅速 采取对在港船舶合理调度、暂缓船舶进港等措施,使港口始终具有高效运作的能力。利用 基于事件触发机制的港口船舶疏运控制系统可以有效对船舶进行疏运,从而解决泊位容量 限制问题,防止港口拥堵。因此,本专利拟采用具有随机状态饱和正切换系统建模一类港 口船舶疏运控制系统,设计系统基于事件触发机制的控制方法,对港口船舶的流量进行实 时管控,确保港口安全高效的运作。
技术实现要素:
5.本发明目的在于提供一种港口船舶承载量饱和的疏运控制方法,以解决上述技术问题。
6.为解决上述技术问题,本发明的一种港口船舶承载量饱和的疏运控制方法的具体技术 方案如下:
7.一种港口船舶承载量饱和的疏运控制方法,包括如下步骤:
8.步骤1、建立具有随机状态饱和的港口船舶疏运控制系统的状态空间模型;
9.步骤2、构造港口船舶拥塞的事件触发控制条件;
10.步骤3、设计港口船舶疏运控制系统的控制器;
11.步骤4、在所述控制器下验证所构造的港口船舶疏运控制系统的正性;
12.步骤5、在所述控制器下验证所构造的港口船舶疏运控制系统的稳定性。
13.进一步地,所述步骤1包括如下具体步骤:
14.步骤1.1:首先对港口的船舶流量进行采集,利用采集的数据建立港口船舶疏运控制 系统的状态空间模型,形式如下:
15.x(k 1)=α
σ(k)
(k)sat(a
σ(k)
x(k) b
σ(k)
u(k)) (1
‑
α
σ(k)
(k))sat(a
σ(k)
x(k) b
σ(k)
u(k)),
16.其中,表示在第k个采样时刻港口的船舶数量,n表示 港口内的泊位数量,为港口船舶流量的控制信号,m表示港口码头的数量,函 数sat(
·
):是向量值的标准饱和函数,被定义为 sat(u)=[sat(u1),sat(u2),
…
,sat(u
m
)]
t
,sat(u
i
(k))=sgn(u
i
(k))min{1,|u
i
(k)|},i∈m,σ(k)是切换 信号,其取值在一个有限集s={1,2,
…
,j}中,j∈z
,和是已知的 系统矩阵,对于σ(k)=i,i∈s,有
[0017]
步骤1.2:随机发生的执行器饱受随机变量α(k)控制,其满足以下条件:
[0018][0019]
其中,
[0020]
进一步地,所述步骤2包括如下具体步骤:
[0021]
建立港口船舶拥塞的事件触发条件:
[0022]
‖e(k)‖1>δ‖x(k)‖1,
[0023]
其中,δ>0,是采样误差,表示采样状态,‖
·
‖1表示向量的1范数, 即向量中所有元素的绝对值之和。
[0024]
进一步地,所述步骤3包括如下具体步骤:
[0025]
步骤3.1:一个对称多面体l(h
i
)定义为:
[0026][0027]
其中,h
ip
是矩阵h
i
的第p行;
[0028]
引入一个锥域,具体如下:
[0029][0030]
其中,t表示转置符号,是n维实数列向量,且即向量v
i
每一个元素均是 正数;
[0031]
步骤3.2:所述港口船舶疏运控制系统采用状态饱和方法进行分析,其中饱和函数满足:
[0032][0033]
其中,u=[u1(k),u2(k),
…
,u
m
(k)]
t
,v=[v1(k),v2(k),
…
,v
m
(k)]
t
,并且|v
j
|≤1,j=1,2,
…
,m,是 m
×
m的对角矩阵,其对角元素为0或1,
[0034]
步骤3.3:设计事件触发控制律为:
[0035][0036]
其中,是控制器增益矩阵,且具体形式为:
[0037][0038]
其中,1
m
表示m维的元素全部为1的列向量,表示第ι个元素为1,其余元素均为0 的m维列向量,是n维列向量;
[0039]
步骤3.4:由步骤3.2可以得到:
[0040][0041]
其中,此外:
[0042][0043]
其中,h
i
是控制器辅助增益矩阵,且具体形式为:
[0044][0045]
步骤3.5、具有随机状态饱和的港口船舶疏运控制系统在事件触发机制下平稳运行的约束 条件设计如下:
[0046]
设计常数ρ1>0,ρ2>0,η1>0,η2>0,ζ>0,λ>1,如果存在n维向量>0,ζ>0,λ>1,如果存在n维向量使得下列不等式:
[0047]
[0048][0049][0050][0051][0052][0053][0054][0055][0056][0057][0058]
成立,那么在事件触发控制率和控制器辅助增益 矩阵h
i
下闭环系统是正的,且是稳定的,平均驻留时间条件满足τ
*
≥
‑
lnλ/lnμ;
[0059]
其中,θ1=i
‑
δ1
n
×
n
,θ2=i δ1
n
×
n
,对于n0=0, 从开始的系统状态将保持在界内。
[0060]
进一步地,所述步骤4包括如下具体步骤:
[0061]
步骤4.1:根据步骤1、步骤3.3和步骤3.4,有:
[0062][0063]
步骤4.2:依据步骤2中事件触发条件式,可以得到:
[0064][0065]
其中,1
n
×
n
表示元素全为1的n
×
n的矩阵;
[0066]
步骤4.3、结合步骤4.1和步骤4.2可得如下不等式:
[0067][0068]
结合步骤3.5中的正性约束条件,当时,有通过递归法得出:对于 任意的初始状态有即闭环系统是正的。
[0069]
进一步地,所述步骤5包括如下具体步骤:
[0070]
步骤5.1:设计线性余正李雅普诺夫函数:
[0071]
v
i
(k)=x
t
(k)v
i
,
[0072]
其差分的数学期望为:
[0073][0074]
结合步骤4.2可得:
[0075][0076]
步骤5.2:根据步骤3.4和步骤3.5有:
[0077][0078]
步骤5.3:情况1:考虑矩阵时,有由步骤 5.2有:
[0079][0080]
因此,步骤5.1中e{δv
i
(k)}可以转化为:
[0081][0082]
情况2:考虑矩阵时,则由步骤3.4和步骤3.5有:
[0083][0084]
结合步骤5.1得出:
[0085][0086]
情况3:考虑矩阵且时,依据步骤3.5、步骤5.2和步骤5.3中情况2可以得 到:
[0087][0088]
步骤5.4、根据步骤5.1和步骤5.3情况3有:
[0089][0090]
将步骤5.3中考虑的三种情况下的e{δv
i
(k)}结合步骤3.5中条件,得如下不等式:
函数sat(
·
):是向量值的标准饱和函数,被定义为 sat(u)=[sat(u1),sat(u2),
…
,sat(u
m
)]
t
,sat(u
i
(k))=sgn(u
i
(k))min{1,|u
i
(k)|},i∈m,σ(k)是切换 信号,其取值在一个有限集s={1,2,
…
,j}中,j∈z
,和是已知的 系统矩阵,对于σ(k)=i,i∈s,有
[0111]
随机发生的执行器饱受随机变量α(k)控制,其满足以下条件:
[0112][0113]
其中,
[0114]
步骤2、建立港口船舶拥塞的事件触发条件:
[0115]
‖e(k)‖1>δ‖x(k)‖1,
[0116]
其中,δ>0,是采样误差,表示采样状态,‖
·
‖1表示向量的1 范数,即向量中所有元素的绝对值之和。
[0117]
步骤3、设计港口船舶疏运控制系统的事件触发控制器,其构建形式如下:
[0118]
步骤3.1、一个对称多面体l(h
i
)定义为:
[0119][0120]
其中,h
ip
是矩阵h
i
的第p行。
[0121]
进一步,考虑到港口码头泊位数的容量限制,引入一个锥域,具体如下:
[0122][0123]
其中,t表示转置符号,是n维实数列向量,且即向量v
i
每一个元素 均是正数。
[0124]
步骤3.2、所述港口船舶疏运控制系统采用状态饱和方法进行分析,其中饱和函数满 足:
[0125][0126]
其中,u=[u1(k),u2(k),
…
,u
m
(k)]
t
,v=[v1(k),v2(k),
…
,v
m
(k)]
t
,并且|v
j
|≤1,j=1,2,
…
,m, d
l
是m
×
m的对角矩阵,其对角元素为0或1,
[0127]
步骤3.3、设计事件触发控制律为:
[0128][0129]
其中,是控制器增益矩阵,且具体形式为:
[0130][0131]
其中,1
m
表示m维的元素全部为1的列向量,表示第ι个元素为1,其余元素均 为0的m维列向量,是n维列向量。
[0132]
步骤3.4、由步骤3.2可以得到:
[0133]
[0134]
其中,此外:
[0135][0136]
其中,h
i
是控制器辅助增益矩阵,且具体形式为:
[0137][0138]
步骤3.5、具有随机状态饱和的港口船舶疏运控制系统在事件触发机制下平稳运行的 约束条件设计如下:
[0139]
设计常数ρ1>0,ρ2>0,η1>0,η2>0,ζ>0,λ>1,如果存在n维向量>0,ζ>0,λ>1,如果存在n维向量使得下列不等式:
[0140][0141][0142][0143][0144][0145][0146][0147][0148][0149][0150][0151]
i≠j,ι=1,2,
…
,m成立,那么在事件触发控制率和控制器辅助 增益矩阵h
i
下闭环系统是正的,且是稳定的,平均驻留时间条件满足τ
*
≥
‑
lnλlnμ。
[0152]
其中,θ1=i
‑
δ1
n
×
n
,θ2=i δ1
n
×
n
,此外,对 于n0=0,从开始的系统状态将保持在界内。
[0153]
进一步地,所述步骤4验证所构造的船舶疏运控制系统在事件触发条件下的正性,包 含如下步骤:
[0154]
步骤4.1、根据步骤1、步骤3.3和步骤3.4,有:
[0155][0156]
步骤4.2、依据步骤2中事件触发条件式,可以得到:
[0157][0158]
其中,1
n
×
n
表示元素全为1的n
×
n的矩阵。
[0159]
步骤4.3、结合步骤4.1和步骤4.2可得如下不等式:
[0160][0161]
结合步骤3.5中的正性约束条件,当时,有于是可以通过递归 法得出:对于任意的初始状态有即闭环系统是正的。
[0162]
步骤5、在所述控制器下验证所构造的港口船舶疏运控制系统的稳定性,其验证过程 如下:
[0163]
步骤5.1、设计线性余正李雅普诺夫函数:
[0164]
v
i
(k)=x
t
(k)v
i
,
[0165]
其差分的数学期望为:
[0166][0167]
结合步骤4.2可得:
[0168][0169]
步骤5.2、根据步骤3.4和步骤3.5有:
[0170][0171]
步骤5.3、情况1:考虑矩阵时,有由 步骤5.2有:
[0172][0173]
因此,步骤5.1中e{δv
i
(k)}可以转化为:
[0174]
[0175]
情况2:考虑矩阵时,则由步骤3.4和步骤3.5有:
[0176][0177]
结合步骤5.1得出:
[0178][0179]
情况3:考虑矩阵且时,依据步骤3.5、步骤5.2和步骤5.3中情况2 可以得到:
[0180][0181]
步骤5.4、根据步骤5.1和步骤5.3情况3有:
[0182][0183]
将步骤5.3中考虑的三种情况下的e{δv
i
(k)}结合步骤3.5中条件,可得如下不等式:
[0184]
e{δv
i
(k)}≤
‑
(1
‑
μ)v
i
(k).
[0185]
因此
[0186][0187]
步骤5.5、假设是σ(k)在区间[0,k)内的切换时间 序列,根据步骤3.5中切换条件,有:
[0188][0189]
进一步
[0190][0191]
其中,φ=e
(lnμ (lnλ)/τ)
,χ1和χ2分别是v
i
,中最小、最大的元 素。
[0192]
根据平均驻留时间条件可以得到:0<φ<1,因此闭环系统是稳定的。
[0193]
进一步地,还包括如下步骤,用于证明在所设计的控制器下系统状态的不变性:
[0194]
对于有x
t
(k)v
i
≤1,即进一步,由步骤3.5, 因此,即
[0195]
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离 本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外, 在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱 离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本 申请的权利要求范围内的实施例都属于本发明所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

