1.本发明涉及无人机技术领域,特别涉及一种运动无人机音频仿真合成方法。
背景技术:
2.近年来,无人机市场蓬勃发展,越来越多的无人机广泛应用于国防、测绘、警用、航拍、遥感、环保、电力、农业等诸多领域,尤其是以“低慢小”为主要特征多旋翼小型民用无人机迅速占领广大市场。随着无人机的平民化、普及化,目前缺乏对无人机的有效管制,无人机很容易成为非法活动的载体,被用来从事侦测、走私、运毒、恐怖袭击、泄密等活动,已经严重威胁到安防与民生。世界各地的无人机的“黑飞”、“滥飞”事件频发,严重危害个人隐私安全与国家社会安全。
3.无人机种类繁多,其尺寸、形状及运动特性的不同导致目标具有不同的雷达散射特性和多普勒特性,是典型的“低慢小”目标,具有低可观测性。具体体现在:
4.(1)目标尺寸较小,散射截面积(radar cross section,rcs)小,速度较慢,目标回波藏匿于强杂波或噪声背景中,信杂比低;
5.(2)目标机动飞行导致多普勒扩散,目标回波难以积累;
6.(3)雷达回波微弱,目标特征提取和估计难;
7.(4)雷达精细化处理过程面临挑战,目标分类识别难度大。
8.针对无人机的上述特点,相继出现了雷达探测、射频探测、视觉探测、音频探测和融合探测等多种探测方法。音频探测具有能检测、定位的优点,尽管小型无人机声音功率较小,作用距离有限(500m以内),但是可以通过增加声阵列数量增大有效覆盖面积,提升检测和定位的距离。同时声阵列能够实现近距离下的高精度无人机声源定位,配合采样率较高的数据采集卡,可以实现厘米级的定位精度。在成本方面,雷达和射频设备的成本最高,其次是摄像头和声音传感器,利用声音传感器配合多通道的数据采集卡,可以搭建一个声阵列网络,实现对受保护区域的有效覆盖。而使用声阵列也可以提供良好的近场辅助探测方案,为其他探测手段提供近距离下的精准定位,配合反制手段自动实现对“黑飞”无人机的干扰。
9.然而,无人机的声阵列音频数据的采集存在以下难点:因无人机的实际位置与飞行速度不易确定、旋翼转速未知,采集到的信号信噪比难以获得,不适宜定量分析。
技术实现要素:
10.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
11.为此,本发明的目的在于提出一种运动无人机音频仿真合成方法,该方法利用声音合成技术,可以通过计算机模拟生成大量音频,为统计分析提供足够多的数据样本。
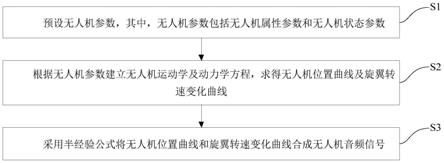
12.为达到上述目的,本发明一方面实施例提出了运动无人机音频仿真合成方法,包括以下步骤:步骤s1,预设无人机参数,其中,所述无人机参数包括无人机属性参数和无人机状态参数;步骤s2,根据所述无人机参数建立无人机运动学及动力学方程,求得无人机位
置曲线及旋翼转速变化曲线;步骤s3,采用半经验公式将所述无人机位置曲线和所述旋翼转速变化曲线合成无人机音频信号。
13.本发明实施例的运动无人机音频仿真合成方法,基于气动声学、螺旋桨声学、空气动力学以及运动学相关理论方程对无人机音频的生成过程进行建模,将无人机的几何参数、动力参数及运动参数均考虑在内,解决了无人机的实际位置与飞行速度不易确定、旋翼转速未知,难以获得信号信噪比的技术问题,可用于合成相对于参考点悬停、匀速运动、变速运动等各种运动状态的无人机声音,可为基于音频的无人机目标检测、定位追踪等提供足量的验证数据样本。
14.另外,根据本发明上述实施例的运动无人机音频仿真合成方法还可以具有以下附加的技术特征:
15.进一步地,在本发明的一个实施例中,所述无人机属性参数包括无人机质量、臂长、单个旋翼叶片数目、旋翼直径和引擎功率,所述无人机状态参数包括旋翼数目、起始坐标和运动速度曲线。
16.进一步地,在本发明的一个实施例中,所述步骤s2具体包括:步骤s201,分别对所述无人机状态参数中的运动速度曲线进行积分和微分处理,得到无人机位移曲线和无人机加速度曲线;步骤s202,根据所述无人机状态参数中的旋翼数目和所述无人机加速度曲线计算无人机旋翼升力曲线;步骤s203,获取当前空气密度,根据所述当前空气密度、所述无人机旋翼升力曲线以及所述无人机属性参数中的旋翼直径计算无人机旋翼角频率曲线。
17.进一步地,在本发明的一个实施例中,所述基波频率f0(t)为:
[0018][0019]
其中,b为单个旋翼叶片数目,ω(t)为无人机旋翼角频率曲线。
[0020]
进一步地,在本发明的一个实施例中,所述步骤s3具体包括:步骤s301,根据所述旋翼转速变化曲线和所述无人机属性参数的单个旋翼叶片数目计算载荷噪声的基波频率;步骤s302,根据所述无人机属性参数计算载荷噪声各谐波分量强度以合成载荷噪声,所述载荷噪声各谐波分量强度由参考声压级、转速修正系数和方位修正系数计算;步骤s303,通过在旋翼叶片上到旋翼中心不同距离的多个位置设置声源,从中心到叶尖均匀放置7个声源,计算每个声源的基频和每个声源的频率成分,并将所述每个声源的基频和所述每个声源的频率成分合成涡旋噪声;步骤s304,将所述载荷噪声和所述涡旋噪声相加得到无人机音频信号。
[0021]
进一步地,在本发明的一个实施例中,所述步骤s302具体包括:步骤s3021,根据所述无人机属性参数的引擎功率计算与旋翼输入功率相关的参考声压级;步骤s3022,根据所述无人机属性参数的单个旋翼叶片数目、旋翼直径及叶尖的马赫数求解转速修正系数;步骤s3023,根据实际方位变化计算方位修正系数;步骤s3024,根据所述参考声压级、所述转速修正系数、所述方位修正系数计算各次谐波的线性增益值,以合成载荷噪声。
[0022]
进一步地,在本发明的一个实施例中,当无人机相对麦克风发生运动时,将产生多普勒频移,设观测点接收到的音频信号为m(t),则有:
[0023][0024]
其中,d(t)为无人机到观测点的距离,c为声速,s(t)为无人机音频信号。
[0025]
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0026]
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
[0027]
图1是旋翼气动噪声来源示意图;
[0028]
图2是本发明一个实施例的运动无人机音频仿真合成方法的流程图;
[0029]
图3是本发明一个实施例的运动无人机音频仿真合成方法的具体执行图;
[0030]
图4是合成音频的频谱示意图。
具体实施方式
[0031]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0032]
需要说明的是,如图1所示,无人机属于螺旋桨驱动飞机,此类飞机产生的噪声有:旋翼气动噪声谐波及次谐波、发动机噪声、机身振动声等,最主要的噪声来源是旋翼的气动噪声。
[0033]
气动噪声的一个主要来源是载荷噪声。当空气经过旋翼时,旋翼叶片周围的气压会产生声音,有一个推力分量是垂直于旋翼旋转平面的压力分量,还有一个扭矩分量是旋翼平面内的压力分量。在平衡的条件下,这两个力相对于叶片是稳定的。当从旋转的旋翼平面上的一个静止的参考点观察时,当叶片通过这一点时,压力将发生波动,这将产生一个频率为叶片通过频率的谐波声源。
[0034]
厚度噪声是当叶片迫使空气向叶片平面两侧扩散时产生的声音,而主要的宽带源是涡旋噪声,由叶片切割空气产生,当旋翼叶片穿过空气时,涡流以给定的频率产生,该频率取决于物体上方空气的速度。湍流声是由空气和旋翼相互作用形成的涡流产生的随机噪声。相对于载荷噪声,这种声音很小,可以忽略不计。
[0035]
主要的宽带源是涡旋噪声,由叶片切割空气产生。关于物体在空气中移动时所产生的漩涡以及声音,已经进行了大量的研究。当旋翼叶片穿过空气时,涡流以给定的频率产生,这取决于物体上方空气的速度。
[0036]
湍流声是由空气和旋翼相互作用形成的涡流产生的随机噪声。这种噪声通常来自低效率源,与其他来源相比可忽略不计。
[0037]
因此,无人机的噪声主要为载荷噪声和涡旋噪声,本发明实施例目的在于求解载
荷噪声和载荷噪声,并将两者进行仿真合成。
[0038]
下面参照附图描述根据本发明实施例提出的运动无人机音频仿真合成方法。
[0039]
图2是本发明一个实施例的运动无人机音频仿真合成方法的流程图。
[0040]
如图2所示,该运动无人机音频仿真合成方法包括以下步骤:
[0041]
在步骤s1中,预设无人机参数,其中,无人机参数包括无人机属性参数和无人机状态参数。
[0042]
其中,无人机属性参数包括无人机质量m、臂长、单个旋翼叶片数目b、旋翼直径d、旋翼数目p和引擎功率p,无人机状态参数包括起始坐标x0和运动速度曲线v(t)。
[0043]
在步骤s2中,根据无人机参数建立无人机运动学及动力学方程,求得无人机位置曲线及旋翼转速变化曲线。
[0044]
进一步地,如图2所示,步骤s2具体包括:
[0045]
步骤s201,分别对无人机状态参数中的运动速度曲线进行积分和微分处理,得到无人机位移曲线和无人机加速度曲线,从而可以得到无人机的实时运动状态,例如参考点悬停、匀速运动、变速运动等各种运动状态。
[0046]
具体地,对运动速度曲线v(t)积分得到位移曲线x(t),具体为:
[0047][0048]
对运动速度曲线v(t)微分得到加速度曲线a(t),具体为:
[0049][0050]
步骤s202,根据无人机状态参数中的旋翼数目和无人机加速度曲线计算无人机旋翼升力曲线。
[0051]
具体地,忽略空气阻力影响,计算无人机旋翼升力曲线f
l
(t),即无人机旋翼升力f
l
(t)与重力满足:
[0052]
pf
l
(t) mg=ma(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0053]
其中,p为旋翼数目,g为重力加速度,m为无人机质量,a(t)为无人机加速度曲线。
[0054]
步骤s203,获取当前空气密度,根据当前空气密度、无人机旋翼升力曲线以及无人机属性参数中的旋翼直径计算无人机旋翼角频率曲线。
[0055]
具体地,先获取当前空气密度ρ,再根据当前空气密度、无人机旋翼升力曲线以及无人机属性参数中的旋翼直径计算无人机旋翼角频率曲线ω(t),其中,旋翼升力大小f
l
(t)=|f
l
(t)|与角频率ω(t)(单位为rad/s)存在以下关系:
[0056][0057]
其中,ρ为空气密度,d为旋翼直径,c
l
为旋翼升力系数,由旋翼形状决定,为无量纲常数,通常在0.01
‑
0.06之间。
[0058]
在步骤s3中,采用半经验公式将无人机位置曲线和旋翼转速变化曲线合成无人机音频信号。
[0059]
进一步地,在本发明的一个实施例中,如图3所示,步骤s3具体包括:
[0060]
步骤s301,根据旋翼转速变化曲线和无人机属性参数的单个旋翼叶片数目计算载
荷噪声的实际基波频率f0(t),提高精准度,具体为:
[0061][0062]
其中,b为单个旋翼叶片数目,ω(t)为无人机旋翼角频率曲线。
[0063]
步骤s302,根据所述无人机属性参数计算载荷噪声各谐波分量强度以合成载荷噪声,所述载荷噪声各谐波分量强度由参考声压级、转速修正系数和方位修正系数计算。
[0064]
具体地,步骤s3021,根据无人机属性参数的引擎功率计算与旋翼输入功率相关的参考声压级l
α
,具体为:
[0065][0066]
其中,p(t)为引擎功率,单位为马力;b为叶片数,d为旋翼直径。
[0067]
步骤s3022,根据无人机属性参数的单个旋翼叶片数目、旋翼直径及叶尖的马赫数求解转速修正系数l
β
,具体为:
[0068][0069]
其中,m
t
(t)为叶尖的马赫数,d为旋翼直径。
[0070]
步骤s3023,根据实际方位变化计算方位修正系数l
γ
,具体为:
[0071]
l
γ
=
‑
5.3
×
10
‑3θ2(t) 1.19θ(t)
‑
62.32
‑
20log(3.375d(t)
‑
1)
ꢀꢀꢀ
(8)
[0072]
其中,θ(t)是声源与观测者之间的方位角曲线,若无人机位置x(t)=[x(t) y(t) z(t)],假设观测者位置为x
b
=[x
b y
b z
b
],则d(t)=|x(t)
‑
x
b
|是观测者和声源之间的距离,单位是米。
[0073]
步骤s3024,根据参考声压级l
α
、转速修正系数l
β
、方位修正系数l
γ
计算各次谐波的线性增益值g(n),以合成载荷噪声ld(t),具体地,
[0074][0075]
其中,m
t
为叶尖的马赫数,a(n)为各谐波的大气吸收近似值,见表1,n为谐波次数。
[0076]
表1不同频带大气吸收近似值
[0077]
[0078][0079]
每个谐波通过窄带带通滤波器滤波的噪声来实现并加和,其中滤波器的通带中心频率为基波及各谐波频率nf0(t),n=1,2,l,n,谐波增益值设置为式(9)中计算的值,合成载荷噪声ld(t)。
[0080]
步骤s303,通过在旋翼叶片上到旋翼中心不同距离的多个位置设置声源,从中心到叶尖均匀放置7个声源,计算每个声源的基频和每个声源的频率成分,并将每个声源的基频和每个声源的频率成分合成涡旋噪声。
[0081]
具体地,通过在旋翼叶片上到旋翼中心不同距离的多个位置设置声源来实现,从中心到叶尖均匀放置7个声源,每个声源的基频通过下式计算:
[0082][0083]
其中,cl为旋翼中心到叶尖的距离,u(t)为空气速度,可通过声源速度估计:
[0084]
u(t)≈ω(t)r
s
ꢀꢀꢀ
(11)
[0085]
其中,ω(t)为旋翼角频率,r
i
,i=1,2,l,7为声源到旋翼中心的距离。
[0086]
每个声源的频率成分如表2所示,其中
[0087][0088]
其中,m(t)为马赫数,c为声速,θ和分别为俯仰角和方位角,d(t)为声源到观测点的距离。每个频率分量仍然按照步骤s309的方法实现并加和,合成涡旋噪声vt(t)。
[0089]
表2涡旋噪声频率成分
[0090][0091][0092]
步骤s304,将载荷噪声和涡旋噪声相加得到无人机音频信号,即参考点悬停、匀速运动、变速运动等各种运动状态的无人机声音,公式为:
[0093]
s(t)=ld(t) vt(t)
ꢀꢀꢀ
(12)
[0094]
最后,当无人机相对麦克风发生运动时,将产生多普勒频移,假设有m个麦克风阵元,位置分别为r
i
,i=1,2,l,m,接收到的音频信号分别为m
i
(t),i=1,2,l,m,设观测点接收到的音频信号为m(t),如图4所示,则有:
[0095][0096]
其中,d(t)为无人机到观测点的距离,c为声速,s(t)为无人机音频信号。
[0097]
根据本发明实施例提出的运动无人机音频仿真合成方法,基于气动声学、螺旋桨声学、空气动力学以及运动学相关理论方程对无人机音频的生成过程进行建模,将无人机的几何参数、动力参数及运动参数均考虑在内,解决了无人机的实际位置与飞行速度不易确定、旋翼转速未知,难以获得信号信噪比的技术问题,可用于合成相对于参考点悬停、匀速运动、变速运动等各种运动状态的无人机声音,可为基于音频的无人机目标检测、定位追踪等提供足量的验证数据样本。
[0098]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0099]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0100]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

