基于ladrc的汽轮发电机控制系统及其静态补偿系数确定方法
技术领域
1.本发明涉及汽轮发电机技术领域,尤其涉及一种基于ladrc的汽轮发电机控制系统及其静态补偿系数确定方法。
背景技术:
2.随着现代电力系统规模和复杂性的不断增加,由系统振荡引起的广域停电的风险也在增加。因此,已有很多先进的控制方法被用于解决负荷频率控制问题,如惯性控制和下降速率控制策略、自适应模糊增益调度、滑模控制(sliding mode control,smc)方法和2
‑
自由度(two
‑
degree
‑
of
‑
freedom,tdf)内模控制(internal model control,imc)的pid(proportional
‑
integral
‑
derivative)整定方法(参考文献tan w. unified tuning of pid load frequency controller for power systems via imc[j]. ieee transactions on power systems, 2010, v25(1):341
‑
350)。但是,这些文献忽略了系统存在非线性特性的情况。而在汽轮发电机控制系统中,存在多种典型非线性特性,例如:调速器死区和发电速率约束(generation rate constraint,grc),它们会恶化系统的动态性能,甚至不稳定。目前也已有文献针对这些问题进行了研究。如模糊c均值聚类技术(fuzzy c
‑
means clustering technique,fcm)、细菌觅食优化算法(bacteria foraging optimization algorithm,bfoa)、万有引力搜索算法(gravitational search algorithm,gsa)和模式搜索法(pattern search,ps)和多变量模型预测控制(model based predictive control,mpc)方法(参考文献mojtaba s, mohammad r, ali m. robust multivariable predictive based load frequency control considering generation rate constraint[j]. electrical power and energy systems, 2013, 46: 405
–
413)。上述这些文献针对汽轮发电机控制系统存在的非线性问题,提出了多种控制策略给予解决,并进行参数优化整定。不过,其所设计的控制器结构相对复杂,计算量大,工业应用困难。
技术实现要素:
[0003]
针对目前的控制器结构相对复杂、计算量大的问题,本发明提供一种基于ladrc的汽轮发电机控制系统及其静态补偿系数确定方法。
[0004]
第一方面,本发明提供一种基于 ladrc的汽轮发电机控制系统,所述控制系统具有调速器死区,包括调速器、汽轮机、电力系统和线性扩张状态观测器,所述控制系统还包括:误差补偿模块;所述误差补偿模块,用于将调速器的理论输出与实际输出之间的误差反馈至线性扩张状态观测器,利用线性扩张状态观测器进行估计,使ladrc达到消除调速器死区的目的。
[0005]
进一步地,所述控制系统还包括:状态反馈增益模块;所述误差补偿模块包括上、下两个补偿分支;其中:
控制系统的输出为频率变化δf;将控制系统的输出作为线性扩张状态观测器的第一路输入信号;线性扩张状态观测器的输出与原始输入信号u作减法运算后作为状态反馈增益模块的输入;状态反馈增益模块的输出分两路:一路与控制系统的输出δf经1/r倍增益后的结果δf/r作减法运算后输出中间量u’;另一路作为误差补偿模块的下补偿分支的第一路输入信号;r为机组下降特性;将所述中间量u’直接作为误差补偿模块的上补偿分支的第一路输入信号,将调速器的实际输出直接作为误差补偿模块的上补偿分支的第二路输入信号;误差补偿模块的上补偿分支的第一路输入信号和第二路输入信号作减法运算后再经过k倍增益后作为误差补偿模块的下补偿分支的第二路输入信号;k为可手动调节的静态补偿系数;误差补偿模块的下补偿分支的第一路输入信号和第二路输入信号作减法运算后作为线性扩张状态观测器的第二路输入信号。
[0006]
进一步地,所述中间量u’经过调速器死区后还作为计算调速器的输入信号的第一参考量;调速器的实际输出还分别直接作为计算调速器的输入信号的第二参考量以及直接作为计算计算汽轮机的输入信号的第一参考量;其中,调速器的输入信号的第一参考量与第二参考量作减法运算后作为调速器的输入信号;汽轮机的输出分为两路,一路直接作为计算汽轮机的输入信号的第二参考量,另一路直接作为计算电力系统的输入信号的第一参考量;其中,汽轮机的输入信号的第一参考量与第二参考量作减法运算后作为汽轮机的输入信号;电力系统的输出分为两路,一路直接作为计算电力系统的输入信号的第二参考量,另一路经过k
p
倍增益后即为控制系统的输出δf;将负荷扰动δp
d
作为计算电力系统的输入信号的第三参考量;其中,电力系统的输入信号的第一参考量依次与第二参考量和第三参考量作减法运算后作为电力系统的输入信号;k
p
为发电机增益。
[0007]
第二方面,本发明还提供一种如上述的基于 ladrc的汽轮发电机控制系统的静态补偿系数确定方法,包括:步骤1:获得非线性元件的描述函数n(x),并绘出负倒描述函数
‑
1/n(x)的曲线,具体包括:具有死区非线性特性的描述函数n(x)如公式(1),其中,死区非线性的死区宽度和线性输出特性的斜率分别为0.1和1: (1)且有:其中,x表示非线性的振幅,k表示线性输出特性的斜率,δ表示死区非线性的死区宽度;步骤2:求传递函数g(jq),具体为:定义
其中,g
l
是ladrc的传递函数;jq表示频率特性,g1表示线性环节的总传递函数,g2表示调速器的传递函数,g3表示汽轮机的传递函数,g4表示电力系统的传递函数,g5表示机组下降特性的倒数,g6表示静态补偿系数k,t
g
表示调速器时间常数,t
t
表示汽轮机时间常数, t
p
表示发电机时间常数,s表示微分算子;然后通过信号流图和梅逊公式可以获得如公式(2)所示的传递函数g(jq):
ꢀꢀ
(2)步骤3:绘出传递函数g(jq)的奈奎斯特曲线,然后应用奈奎斯特稳定判据进行分析,具体为:将g(jq)的奈奎斯特曲线和
‑
1/n(x)的曲线绘制在同一个坐标系中,g(jq)的奈奎斯特曲线与负实轴的交点为 ,若g(jq)的奈奎斯特曲线不包围
‑
1/n(x)的曲线,即 ,则该系统稳定;若g(jq)的奈奎斯特曲线包围
‑
1/n(x)的曲线,即 ,则该系统不稳定。
[0008]
第三方面,本发明提供一种基于ladrc的汽轮发电机控制系统,所述控制系统具有汽轮机发电速率约束,包括调速器、汽轮机、电力系统和线性扩张状态观测器,所述控制系统还包括:误差补偿模块;所述误差补偿模块,用于将汽轮机的理论输出与实际输出之间的误差作为外部扰动反馈至线性扩张状态观测器,利用线性扩张状态观测器进行估计,使ladrc消除汽轮机发电速率约束的影响。
[0009]
进一步地,所述控制系统还包括:状态反馈增益模块;所述误差补偿模块包括上、下两个补偿分支;其中:控制系统的输出为频率变化δf;将控制系统的输出作为线性扩张状态观测器的第一路输入信号;线性扩张状态观测器的输出与原始输入信号u作减法运算后作为状态反馈增益模块的输入;状态反馈增益模块的输出分两路:一路与控制系统的输出δf经1/r 倍增益后的结果δf/r作减法运算后输出中间量u’;另一路作为误差补偿模块的下补偿分支的第一路输入信号;r为机组下降特性;将所述中间量u’依次经过 和 倍增益后作为误差补偿模块的上补偿分支的第一路输入信号,将汽轮机的实际输出直接作为误差补偿模块的上补偿分支的第二路输入信号;其中,t
g
表示调速器时间常数,t
t
表示汽轮机时间常数;误差补偿模块的上补偿分支的第一路输入信号和第二路输入信号作减法运算后再经过k1倍增益后作为误差补偿模块的下补偿分支的第二路输入信号;k1为可手动调节的静态补偿系数;误差补偿模块的下补偿分支的第一路输入信号和第二路输入信号作减法运算后作为线性扩张状态观测器的第二路输入信号。
[0010]
进一步地,所述中间量u’还直接作为计算调速器的输入信号的第一参考量;调速器的输出分为两路,一路直接作为计算调速器的输入信号的第二参考量,另一路直接作为计算汽轮机的输入信号的第一参考量;其中,调速器的输入信号的第一参考量与第二参考量作减法运算后作为调速器的输入信号;汽轮机的实际输出还分别直接作为计算汽轮机的输入信号的第二参考量以及直接作为计算电力系统的输入信号的第一参考量;其中,汽轮机的输入信号的第一参考量与第二参考量作减法运算后作为汽轮机的输入信号;电力系统的输出分为两路,一路直接作为计算电力系统的输入信号的第二参考量,另一路经过k
p
倍增益后即为控制系统的输出δf;将负荷扰动δp
d
作为计算电力系统的输入信号的第三参考量;其中,电力系统的输入信号的第一参考量依次与第二参考量和第三参考量作减法运算后作为电力系统的输入信号;k
p
为发电机增益。
[0011]
第四方面,本发明还提供一种如上述的基于ladrc的汽轮发电机控制系统的静态补偿系统确定方法,包括:步骤1:获得非线性元件的描述函数n1(x),并绘出负倒描述函数
‑
1/n1(x)的曲线,具体包括;具有饱和非线性特性的描述函数n1(x)如公式(3),其中,饱和非线性的线性区宽度和线性区特性的斜率分别为0.0017和1:
ꢀꢀ
(3)且有:其中,x表示非线性的振幅,k表示线性区特性的斜率,a表示饱和非线性的线性区宽度;步骤2:求传递函数g1(jq),具体为:定义其中,是ladrc的传递函数;jq表示频率特性,表示线性环节的总传递函数,表示调速器的传递函数,和均表示汽轮机的传递函数,表示电力系统的传递函数,表示电力系统的传递函数的倒数,表示调速器的传递函数与汽轮机的传递函数的乘积,表示机组下降特性的倒数,表示静态补偿系数k1,表示常数值1,t
g
表示调速器时间常数,t
t
表示汽轮机时间常数, t
p
表示发电机时间常数,s表示微分算子;然后通过信号流图和梅逊公式可以获得如公式(4)所示的传递函数g1(jq):
ꢀꢀ
(4)步骤3:绘出传递函数g1(jq)的奈奎斯特曲线,然后应用奈奎斯特稳定判据进行分析,具体为:将g1(jq)的奈奎斯特曲线和
‑
1/n1(x)的曲线绘制在同一个坐标系中,g1(jq)的奈奎斯特曲线与负实轴的交点为 ,若g1(jq)的奈奎斯特曲线不包围
‑
1/n1(x)的曲线,即 ,则该系统稳定;若g1(jq)的奈奎斯特曲线包围
‑
1/n1(x)的曲线,即 ,则该系统不稳定。
[0012]
本发明的有益效果:相对于其他控制算法来说,线性自抗扰控制算法(linear active disturbance rejection control, ladrc)是一种独立于被控对象模型的普适性控制结构,结构更简单且适用于各种非线性系统,特别地,线性自抗扰控制算法只需整定2个参数,因此很容易为控制工程师所理解。所以,针对存在调速器死区或汽轮机grc的汽轮发电机控制系统,本发明采用了线性自抗扰控制算法。
[0013]
然而,线性自抗扰控制算法作为一种一般控制结构,当系统存在非线性特性时,需要将ladrc转化为高阶控制器,但这样会破坏其固有的控制结构,可能会使其失去主动抗扰的特性。因此,针对存在调速器死区或汽轮机grc的汽轮发电机控制系统,本发明提出了采用基于线性自抗扰控制算法的误差补偿策略的新的汽轮发电机控制系统,使线性自抗扰控制算法能够快速地消除调速器死区或汽轮机grc的影响。另外,该补偿策略有一个可手动调节的静态补偿系数k或k1,但是,随着该补偿系数的变大,系统的控制性能也会受到影响,故需要确认该补偿系数的取值范围。所以,对应地还分别提出了采用描述函数法进行稳定验证和获取该补偿策略中静态补偿系数的取值范围。仿真结果显示,本发明提出的误差补偿策略对改善系统的控制性能有良好的表现,且采用描述函数法获取补偿系数的取值范围,为该系数的选取提供参考也是可行的。
附图说明
[0014]
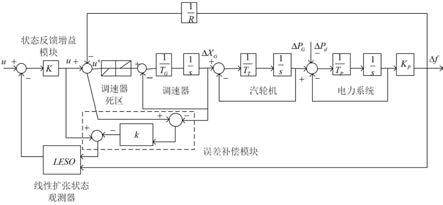
图1为本发明实施例提供的一种基于 ladrc的汽轮发电机控制系统的结构示意图之一;图2为本发明实施例提供的在采用误差补偿策略的ladrc的电力系统阶跃响应示意图之一;图3为本发明实施例提供的g(jq)的奈奎斯特曲线和
‑
1/n(x)的曲线示意图;图4为本发明实施例提供的在采用误差补偿策略的ladrc的电力系统阶跃响应之二;图5为本发明实施例提供的在采用误差补偿策略的ladrc的电力系统阶跃响应之三;图6为本发明实施例提供的一种基于 ladrc的汽轮发电机控制系统的结构示意图之二;图7为本发明实施例提供的在采用误差补偿策略的ladrc的电力系统阶跃响应示
意图之四;图8为本发明实施例提供的g1(jq)的奈奎斯特曲线和
‑
1/n1(x)的曲线示意图;图9为本发明实施例提供的在采用误差补偿策略的ladrc的电力系统阶跃响应示意图之五。
具体实施方式
[0015]
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0016]
实施例1在汽轮发电机控制系统中,调速器死区非线性是普遍存在的,因而会影响系统的控制性能。本发明实施例针对具有调速器死区非线性的汽轮发电机控制系统系统,将ladrc用到系统中。接着,在ladrc的基础上,提出了一种误差补偿策略,该补偿策略如图1所示。其思想是将调速器理论输出与实际输出的误差反馈回leso,利用leso进行估计,使ladrc达到消除死区的目的,从而使系统的控制性能快速地恢复和改善。
[0017]
如图1所示,本发明实施例提供一种基于 ladrc的汽轮发电机控制系统,所述控制系统具有调速器死区,包括调速器、汽轮机、电力系统和线性扩张状态观测器,所述控制系统还包括:误差补偿模块;所述误差补偿模块,用于将调速器的理论输出与实际输出之间的误差反馈至线性扩张状态观测器,利用线性扩张状态观测器进行估计,使ladrc达到消除调速器死区的目的,从而使控制系统的控制性能快速地恢复和改善。
[0018]
作为一种可实施方式,该控制系统还包括状态反馈增益模块;所述误差补偿模块包括上、下两个补偿分支;其中:控制系统的输出为频率变化δf;将控制系统的输出作为线性扩张状态观测器的第一路输入信号;线性扩张状态观测器的输出与原始输入信号u作减法运算后作为状态反馈增益模块的输入;状态反馈增益模块的输出分两路:一路与控制系统的输出δf经1/r倍增益后的结果δf/r作减法运算后输出中间量u’;另一路作为误差补偿模块的下补偿分支的第一路输入信号;为机组下降特性;将所述中间量u’直接作为误差补偿模块的上补偿分支的第一路输入信号,将调速器的实际输出直接作为误差补偿模块的上补偿分支的第二路输入信号;误差补偿模块的上补偿分支的第一路输入信号和第二路输入信号作减法运算后再经过k倍增益后作为误差补偿模块的下补偿分支的第二路输入信号;k为可手动调节的静态补偿系数;误差补偿模块的下补偿分支的第一路输入信号和第二路输入信号作减法运算后作为线性扩张状态观测器的第二路输入信号。
[0019]
作为一种可实施方式,所述中间量u’经过调速器死区后还作为计算调速器的输入
信号的第一参考量;调速器的实际输出还分别直接作为计算调速器的输入信号的第二参考量以及直接作为计算计算汽轮机的输入信号的第一参考量;其中,调速器的输入信号的第一参考量与第二参考量作减法运算后作为调速器的输入信号;汽轮机的输出分为两路,一路直接作为计算汽轮机的输入信号的第二参考量,另一路直接作为计算电力系统的输入信号的第一参考量;其中,汽轮机的输入信号的第一参考量与第二参考量作减法运算后作为汽轮机的输入信号;电力系统的输出分为两路,一路直接作为计算电力系统的输入信号的第二参考量,另一路经过k
p
倍增益后即为控制系统的输出δf;将负荷扰动δp
d
作为计算电力系统的输入信号的第三参考量;其中,电力系统的输入信号的第一参考量依次与第二参考量和第三参考量作减法运算后作为电力系统的输入信号;k
p
为发电机增益。
[0020]
实施例2上述实施例中的基于 ladrc的汽轮发电机控制系统中,存在一个可手动调节的静态补偿系数k,但是,随着该补偿系数的变大,系统的控制性能也会受到影响,故需要确认该补偿系数的取值范围。因此,对应上述实施例中的基于 ladrc的汽轮发电机控制系统,本发明实施例还提供一种基于 ladrc的汽轮发电机控制系统的静态补偿系数确定方法,本发明称之为描述函数法,该方法包括以下步骤:s101:获得非线性元件的描述函数n(x),并绘出负倒描述函数
‑
1/n(x)的曲线,具体包括:具有死区非线性特性的描述函数n(x)如公式(1),其中,死区非线性的死区宽度和线性输出特性的斜率分别为0.1和1:
ꢀꢀ
(1)且有:其中,x表示非线性的振幅,k表示线性输出特性的斜率,δ表示死区非线性的死区宽度。
[0021]
s102:求传递函数g(jq),具体为:对于图1所示的单区域汽轮发电机控制系统,定义其中,g
l
是ladrc的传递函数;jq表示频率特性,g1表示线性环节的总传递函数,g2表示调速器的传递函数,g3表示汽轮机的传递函数,g4表示电力系统的传递函数,g5表示机组下降特性的倒数,g6表示静态补偿系数k,t
g
表示调速器时间常数,t
t
表示汽轮机时间常数, t
p
表示发电机时间常数,s表示微分算子。
[0022]
然后通过信号流图和梅逊公式可以获得如公式(2)所示的传递函数g(jq):
ꢀꢀ
(2)s103:绘出传递函数g(jq)的奈奎斯特曲线,然后应用奈奎斯特稳定判据进行分
析,具体为:可通过matlab将g(jq)的奈奎斯特曲线和
‑
1/n(x)的曲线绘制在同一个坐标系中,g(jq)的奈奎斯特曲线与负实轴的交点为 ,若g(jq)的奈奎斯特曲线不包围
‑
1/n(x)的曲线,即 ,则该系统稳定;若g(jq)的奈奎斯特曲线包围
‑
1/n(x)的曲线,即 ,则该系统不稳定。
[0023]
为了证实本发明提出的控制系统及其补偿系数确定方法的可行性与准确性,本发明考虑具有如下模型参数的单区域电力系统:采用ladrc进行控制,其参数选取为:其中,w
c
是控制器带宽,w
o
是观测器带宽,补偿系数取为k=0.7,为了显示ladrc在该补偿策略下的控制效果,在t=1秒时加入阶跃信号δp
d
=0.01,且死区取值为0.1,系统的响应曲线如图2所示。其中,黑色虚线表示当系统存在调速器死区时的情况,黑色实线表示系统不存在调速器死区的情况,黑色点线表示系统采用了误差补偿策略后的情况。可以看到,在不采取误差补偿策略时,系统由于死区非线性的存在,其控制性能受到恶化,而在采用误差补偿策略后,系统的控制性能得到了较好的改善。因此,该补偿策略在消除死区非线性方面是切实有效。
[0024]
为了确定补偿系数的取值范围,采用描述函数法进行稳定性分析,要使系统稳定,则需满足,进而可得的取值范围0<k<0.91。而当k=0.91时,g(jq)的奈奎斯特曲线包围
‑
1/n(x)的曲线,则系统不稳定,其结果如图3所示。接着,我们通过手动调节补偿系数k,来确认其的取值范围,仿真结果如图4、5所示。显而易见地,当k逐渐变大时,补偿效果逐渐提高,但是增加到0.91时,系统变得不稳定。仿真结果证实,采用描述函数法对具有调速器死区的汽轮发电机控制系统进行稳定性分析,获取静态补偿系数k的取值范围是可行的。
[0025]
实施例3在汽轮发电机控制系统中,汽轮机grc会影响系统的控制性能,出现不稳定。因此,本发明实施例在ladrc的基础上,提出了一种误差补偿策略,其补偿策略如图6所示。其思想是将汽轮机的理论输出与实际输出的误差作为外部扰动,加入leso进行估计,从而使ladrc消除grc的影响,使系统的控制性能可以快速地恢复和改善。
[0026]
如图6所示,本发明实施例提供一种基于ladrc的汽轮发电机控制系统,所述控制系统具有汽轮机发电速率约束,包括调速器、汽轮机、电力系统和线性扩张状态观测器,所述控制系统还包括:误差补偿模块;所述误差补偿模块,用于将汽轮机的理论输出与实际输出之间的误差作为外部扰动反馈至线性扩张状态观测器,利用线性扩张状态观测器进行估计,使ladrc消除汽轮机发电速率约束的影响。
[0027]
作为一种可实施方式,该控制系统还包括:状态反馈增益模块;所述误差补偿模块包括上、下两个补偿分支;其中:控制系统的输出为频率变化δf;将控制系统的输出作为线性扩张状态观测器的第一路输入信号;
线性扩张状态观测器的输出与原始输入信号u作减法运算后作为状态反馈增益模块的输入;状态反馈增益模块的输出分两路:一路与控制系统的输出δf经1/r 倍增益后的结果δf/r作减法运算后输出中间量u’;另一路作为误差补偿模块的下补偿分支的第一路输入信号;r为机组下降特性;将所述中间量u’依次经过 和 倍增益后作为误差补偿模块的上补偿分支的第一路输入信号,将汽轮机的实际输出直接作为误差补偿模块的上补偿分支的第二路输入信号;其中,t
g
表示调速器时间常数,t
t
表示汽轮机时间常数;误差补偿模块的上补偿分支的第一路输入信号和第二路输入信号作减法运算后再经过k1倍增益后作为误差补偿模块的下补偿分支的第二路输入信号;k1为可手动调节的静态补偿系数;误差补偿模块的下补偿分支的第一路输入信号和第二路输入信号作减法运算后作为线性扩张状态观测器的第二路输入信号。
[0028]
作为一种可实施方式,所述中间量u’还直接作为计算调速器的输入信号的第一参考量;调速器的输出分为两路,一路直接作为计算调速器的输入信号的第二参考量,另一路直接作为计算汽轮机的输入信号的第一参考量;其中,调速器的输入信号的第一参考量与第二参考量作减法运算后作为调速器的输入信号;汽轮机的实际输出还分别直接作为计算汽轮机的输入信号的第二参考量以及直接作为计算电力系统的输入信号的第一参考量;其中,汽轮机的输入信号的第一参考量与第二参考量作减法运算后作为汽轮机的输入信号;电力系统的输出分为两路,一路直接作为计算电力系统的输入信号的第二参考量,另一路经过k
p
倍增益后即为控制系统的输出δf;将负荷扰动δp
d
作为计算电力系统的输入信号的第三参考量;其中,电力系统的输入信号的第一参考量依次与第二参考量和第三参考量作减法运算后作为电力系统的输入信号;k
p
为发电机增益。
[0029]
实施例4上述实施例中的基于 ladrc的汽轮发电机控制系统中,存在一个可手动调节的静态补偿系数k1,但是,随着该补偿系数的变大,系统的控制性能也会受到影响,故需要确认该补偿系数的取值范围。因此,对应上述实施例中的基于 ladrc的汽轮发电机控制系统,本发明实施例还提供一种基于ladrc的汽轮发电机控制系统的静态补偿系统确定方法,包括以下步骤:s201:获得非线性元件的描述函数n1(x),并绘出负倒描述函数
‑
1/n1(x)的曲线,具体包括;具有饱和非线性特性的描述函数n1(x)如公式(3),其中,饱和非线性的线性区宽度和线性区特性的斜率分别为0.0017和1:
ꢀꢀ
(3)且有:
其中,x表示非线性的振幅,k表示线性区特性的斜率,a表示饱和非线性的线性区宽度。
[0030]
s202:求传递函数g1(jq),具体为:对于图6所示单区域汽轮发电机控制系统,定义其中,是ladrc的传递函数;jq表示频率特性,表示线性环节的总传递函数,表示调速器的传递函数,和均表示汽轮机的传递函数,表示电力系统的传递函数,表示电力系统的传递函数的倒数,表示调速器的传递函数与汽轮机的传递函数的乘积,表示机组下降特性的倒数,表示静态补偿系数k1,表示常数值1,t
g
表示调速器时间常数,t
t
表示汽轮机时间常数, t
p
表示发电机时间常数,s表示微分算子。
[0031]
然后通过信号流图和梅逊公式可以获得如公式(4)所示的传递函数g1(jq):
ꢀꢀ
(4)s203:绘出传递函数g1(jq)的奈奎斯特曲线,然后应用奈奎斯特稳定判据进行分析,具体为:可通过matlab将g1(jq)的奈奎斯特曲线和
‑
1/n1(x)的曲线绘制在同一个坐标系中,g1(jq)的奈奎斯特曲线与负实轴的交点为 ,若g1(jq)的奈奎斯特曲线不包围
‑
1/n1(x)的曲线,即 ,则该系统稳定;若g1(jq)的奈奎斯特曲线包围
‑
1/n1(x)的曲线,即 ,则该系统不稳定。
[0032]
为了证实本发明提供的控制系统及其补偿系数确定方法的可行性与准确性,本发明考虑具有如下模型参数的单区域电力系统:ladrc参数选取如下:其中,w
c
是控制器带宽,w
o
是观测器带宽,补偿系数取为k1=1.14,为了显示ladrc在该补偿策略下的控制效果,当grc=0.0017mw/s时,在t=1秒时加入阶跃信号δp
d
=0.01,系统的响应曲线如图7所示。黑色点线表示系统采用了误差补偿策略后的情况,黑色实线表示系统没有采用误差补偿策略的情况。可以看到,在不采取误差补偿策略时,系统由于受到汽轮机grc的影响,其控制性能受到恶化,变得不稳定,而在采用误差补偿策略后,系统的控制性能得到了很好的改善和恢复。因此,该补偿策略是切实有效的。
[0033]
为确定补偿系数的取值范围,先采用描述函数法进行稳定性分析,要使系统稳定,
则需满足,进而可得k1的取值范围0< k1<1.24。而当k1=1.24时,g1(jq)的奈奎斯特曲线包围
‑
1/n1(x)的曲线,则系统不稳定,其结果如图8所示。我们通过手动调节补偿系数k1,来确认其的取值范围,仿真结果如图9所示。可以看到,当k1逐渐变大到1.24时,系统变得不稳定。仿真结果证实,采用描述函数法对具有汽轮机grc的汽轮发电机控制系统进行稳定性分析,从而获取静态补偿系数的取值范围是可行的。
[0034]
本发明针对存在调速器死区或汽轮机grc的汽轮发电机控制系统,分别提出了基于线性自抗扰控制算法的误差补偿策略,使线性自抗扰控制算法能够快速地消除调速器死区或汽轮机grc的影响。同时,也分别对应地提出采用描述函数法进行验证和获取该补偿策略中静态补偿系数的取值范围。仿真结果显示,本发明提出的误差补偿策略对改善系统的控制性能有良好的表现,且采用描述函数法获取补偿系数的取值范围,为该系数的选取提供参考也是可行的。
[0035]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

