1.本发明涉及工业自动控制领域,尤其涉及一种单连杆机械臂的模糊自适应控制方法、系统及存储介质。
背景技术:
2.近年来,随着机器人技术的发展,应用高速度、高精度、高负载自重比的机器人结构受到工业和航空航天领域的关注。在机械臂系统的实际控制过程中滞回现象普遍存在。这种滞后现象会降低系统的跟踪性能,影响控制系统的稳定性,因此如何补偿这种迟滞现象,使系统具有良好的性能是一个热点话题。此外,在实际的控制系统中,由于网络传输资源是非常有限,而系统要求的控制量相当大,因此在考虑输入迟滞的同时节约网络通信带宽也是一个迫切需要解决的问题。
3.术语解释
4.有限时间控制方法:指在设定时间的区间内,系统状态轨迹在预定的界限内达到平衡。
5.反步设计法:通过递归地构造闭环系统的lyapunov函数获得反馈控制器,选取控制律使得lyapunov函数沿闭环系统轨迹的导数具有某种性能,使闭环系统轨迹的有界性和收敛到平衡点,所选取的控制律就是系统镇定问题、跟踪问题、干扰抑制问题或者几种问题综合的解。
6.不确定非线性系统:指同时具有不确定系统和非线性系统特点的系统,即其输出不与其输入成正比,同时带有不确定参数、不确定动力学(系统摄动)及外干扰的系统。
7.时间触发:间隔固定的周期进行触发。
8.事件触发机制:根据系统当前的状态决定是否触发,如果系统状态满足触发条件才进行各种操作。
9.滞环:测量设备输出量与先前输入量顺序有关的一种特性。当输入量分别由增加方向、减小方向到达同一量时,两输出量之差称为滞后误差。
10.李雅普洛夫稳定性(lyapunov stability):在自动控制领域中,李雅普诺夫稳定性可用来描述一个动力系统的稳定性。如果此动力系统任何初始条件在平衡态附近的轨迹均能维持在平衡态附近,那么可以称为在处李雅普诺夫稳定。李雅普诺夫稳定性可用在线性及非线性的系统中。不过线性系统的稳定性可由其他方式求得,因此李雅普诺夫稳定性多半用来分析非线性系统的稳定性。李亚普诺夫稳定性的概念可以延伸到无限维的流形,即为结构稳定性,是考虑微分方程中一群不同但“接近”的解的行为。输入
‑
状态稳定性(iss)则是将李雅普诺夫稳定性应用在有输入的系统。若任何初始条件在平衡态附近的轨迹最后都趋近,那么该系统可以称为在处渐近稳定。指数稳定可用来保证系统最小的衰减速率,也可以估计轨迹收敛的快慢。
11.自适应补偿(adaptive compensation):是根据系统执行器的冗余情况,设计自适应补偿控制律,利用有效的执行器,达到跟踪参考模型运动的控制目的,同时保持较好的动
态和稳态性能的控制方法,其主要解决对于mimo非线性系统执行器故障的容错控制问题。
12.模糊逻辑系统(fuzzy logic systems,flss):模糊逻辑系统是指利用模糊概念和模糊逻辑构成的系统。当它被用来充当控制器时,就称为模糊逻辑控制器(fuzzy logic controller)。由于在选择模糊概念和模糊逻辑上的随意性,可以构造出多种多样的模糊逻辑系统。最常见的模糊逻辑系统有三类:纯模糊逻辑系统、高木
‑
关野模糊逻辑系统和具有模糊产生器以及模糊消除器的模糊逻辑系统。
13.芝诺行为(zeno behavior):指在事件触发控制中,控制在有限时间内发生无限次触发。
技术实现要素:
14.有鉴于此,本发明实施例的目的是提供单连杆机械臂的模糊自适应控制方法、系统及存储介质,能够实现迟滞的动态补偿,在有限时间内收敛且可以节省通信资源。
15.第一方面,本发明实施例提供了一种单连杆机械臂的模糊自适应控制方法,包括步骤:
16.建立单连杆机械臂的非线性模型及磁滞模型;所述非线性模型的输入为磁滞的线性函数;
17.根据误差模型及所述非线性模型确定虚拟控制器模型及虚拟自适应律;
18.根据所述非线性模型及事件触发模型确定模糊自适应触发控制器模型及触发自适应律;所述事件触发模型根据动态阈值进行更新;
19.根据所述虚拟控制器模型、所述虚拟自适应律、所述模糊自适应触发控制器模型及所述触发自适应律对单连杆机械臂的执行器进行控制。
20.可选地,所述磁滞模型根据输出信号相对时间的导函数及输入信号相对时间的导函数确定。
21.可选地,所述事件触发模型根据触发控制输入信号确定所述动态阈值。
22.可选地,所述虚拟控制器模型根据误差变量的指数函数及已知非线性系统函数确定。
23.可选地,所述根据所述非线性模型及事件触发模型确定模糊自适应触发控制器模型及触发自适应律,包括步骤:
24.根据非线性模型及误差变量确定事件触发函数;
25.根据所述事件触发函数及事件触发模型确定模糊自适应触发控制器模型及触发自适应律。
26.第二方面,本发明实施例提供了一种单连杆机械臂的模糊自适应控制系统,包括:
27.第一模型确定模块,用于建立单连杆机械臂的非线性模型及磁滞模型;所述非线性模型的输入为磁滞的线性函数;
28.第二模型确定模块,用于根据误差模型及所述非线性模型确定虚拟控制器模型及虚拟自适应律;
29.第三模型确定模块,用于根据所述非线性模型及事件触发模型确定模糊自适应触发控制器模型及触发自适应律;所述事件触发模型根据动态阈值进行更新;
30.综合控制模块,用于根据所述虚拟控制器模型、所述虚拟自适应律、所述模糊自适
应触发控制器模型及所述触发自适应律对单连杆机械臂的执行器进行控制。
31.第三方面,本发明实施例提供了一种单连杆机械臂的模糊自适应控制系统,包括:
32.至少一个处理器;
33.至少一个存储器,用于存储至少一个程序;
34.当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现第一方面实施例所述的模糊自适应控制方法。
35.第四方面,本发明实施例提供了一种存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行第一方面实施例所述的模糊自适应控制方法。
36.第五方面实施例一种单连杆机械臂的模糊自适应控制系统,包括控制器、执行器及单连杆机械臂,所述执行器连接所述控制器及所述单连杆机械臂,所述控制器包括:
37.至少一个处理器;
38.至少一个存储器,用于存储至少一个程序;
39.当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现第一方面实施例所述的模糊自适应控制方法。
40.实施本发明实施例包括以下有益效果:本发明实施例中的非线性模型考虑输入迟滞的影响,事件触发模型根据动态阈值进行更新,并根据误差模型及非线性模型确定虚拟控制虚拟控制器及虚拟自适应律,以及根据事件触发模型及非线性模型确定模糊自适应触发控制器模型及触发自适应律;从而实现迟滞的动态补充及节省通信资源,以及在有限时间内收敛。
附图说明
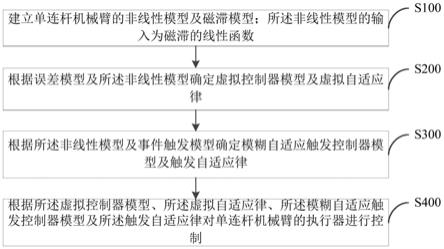
41.图1是本发明实施例提供的一种单连杆机械臂的模糊自适应控制方法的步骤流程示意图;
42.图2是本发明实施例提供的一种单连杆机械臂的模糊自适应控制系统的结构框图;
43.图3是本发明实施例提供的一种单连杆机械臂的模糊自适应控制系统的仿真流程图;
44.图4是本发明实施例提供的一种单连杆机械臂的模糊自适应控制系统的系统输出信号和参考输出信号的对比图;
45.图5是本发明实施例提供的一种单连杆机械臂的模糊自适应控制系统的跟踪误差图;
46.图6是本发明实施例提供的一种单连杆机械臂在一般情况下的控制输入和采用本发明实施例中的触发控制输入的信号对比图;
47.图7是本发明实施例提供的一种单连杆机械臂的模糊自适应控制系统的执行时间间隔图;
48.图8是本发明实施例提供的第二种单连杆机械臂的模糊自适应控制系统的结构框图;
49.图9是本发明实施例提供的第三种单连杆机械臂的模糊自适应控制系统的结构框
图。
具体实施方式
50.下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
51.如图1所示,本发明实施例提供了一种单连杆机械臂的模糊自适应控制方法,其包括的步骤如下所示。
52.s100、建立单连杆机械臂的非线性模型及磁滞模型;所述非线性模型的输入为磁滞的线性函数。
53.可选地,所述磁滞模型根据输出信号相对时间的导函数及输入信号相对时间的导函数确定。
54.具体地,考虑如下单连杆机械臂系统,考虑以下一类不确定的非线性系统:
[0055][0056]
其中,x=[x1,
…
,x
n
]
t
∈r
n
是系统的状态变量;u(t)是系统的输入信号;f
i
(
·
)∈r,(i=1,
…
,n)是系统中的不确定非线性函数,是系统中已知的光滑非线性函数;q∈r表示未知的常量参数。
[0057]
考虑到系统中存在输入磁滞,将系统输出响应表示为v
c
=b(u
c
),其中u
c
为所设计的控制器。磁滞模型可以表示为:
[0058][0059]
其中a,和b是常量,且由此可以得到:
[0060][0061]
其中p(u
c
)表示有界变量。设p=p(u
c
),输入磁滞的模型可以表示为:
[0062][0063]
s200、根据误差模型及所述非线性模型确定虚拟控制器模型及虚拟自适应律。
[0064]
可选地,所述虚拟控制器模型根据误差变量的指数函数及已知非线性系统函数确定。
[0065]
综上所述,设计单连杆机械臂的非线性系统为:
[0066][0067]
其中,x1表示位移,x2表示速度,i是惯性,m是质量,g是重力加速度,l为质心到关节的长度,b是粘性摩擦系数,d
k
是未知的干扰。
[0068]
具体地,引入以下误差方程:
[0069][0070]
式中α
i
(i=1,2)为虚拟控制律,z
i
(i=1,2)为误差变量。在设计程序之前,定义设计过程如下所示。
[0071]
步骤1设计虚拟控制律为
[0072][0073]
式中,c1是一个正常量,ξ1(
·
):r
n
→
r
r
是已知的γ阶(γ≥1)光滑非线性函数,β是一个常量,满足是未知参数变量θ1的估计值,即γ1是一个r
×
r阶的正定矩阵。
[0074]
设计自适应律为:
[0075][0076]
步骤2设计虚拟控制律α2为:
[0077][0078]
s300、根据所述非线性模型及事件触发模型确定模糊自适应触发控制器模型及触发自适应律;所述事件触发模型根据动态阈值进行更新;
[0079]
可选地,所述事件触发模型根据触发控制输入信号确定所述动态阈值。
[0080]
具体地,由于通信信道带宽和计算能力的限制,为了节省通信网络的网络资源,考虑以下事件触发方案:
[0081][0082]
其中t
k
,k∈r
表示控制器的触发时刻,t
k 1
为下一个触发时刻。w(t)为事件触发控制器的输入,f
e
(
·
)是变化的阈值。
[0083]
可选地,所述根据所述非线性模型及事件触发模型确定模糊自适应触发控制器模型及触发自适应律,包括步骤:
[0084]
根据非线性模型及误差变量确定事件触发函数;
[0085]
根据所述事件触发函数及事件触发模型确定模糊自适应触发控制器模型及触发自适应律。
[0086]
具体地,在控制策略中,采用模糊逻辑系统(fls)逼近未知的连续函数。
[0087]
k
t
γ(x)表示flss中的估计参数向量;k=(k1,k2,
…
,k
n
)
t
是参数变量;γ(x)=(γ1(x),γ2(x),
…
,γ
n
(x))表示已知的模糊基函数向量;n表示模糊规则的个数;x=[x1,x2,
…
,x
k
]是近似器的输入向量。设区域中心为则模糊基函数γ
i
(x)为:
[0088][0089]
假设1、q的方向已知但大小未知,q≠0,
[0090]
假设2、期望信号r已知且有界,存在3阶导数。
[0091]
具体地,事件触发通信方案的触发条件基于控制信号u
c
(t)的变化,是一种非周期性的事件触发机制。当控制信号u
c
(t)的变化超过一个阈值时,才对触发器的输出信号进行更新,使更新间隔变长,从而节省资源的目的。在系统运行过程中,随着系统状态逐渐趋于稳定,触发器更新的频率逐渐减小,然后只需消耗更小的资源便能保持系统稳定。事件触发方案的定义如下:
[0092][0093]
其中,t
k
>0,k∈z
,γ1=|w(t)
‑
u
c
(t)|,σ>0,m1>0,0<δ<1,m1为常数型参数。
[0094]
u是控制律,定义为:
[0095][0096]
其中,参数和
p
在实际情况中是存在的,但是未知,这使得后续的分析十分复杂。为解决这问题,本文设为的估计值,为的估计值,其中,
[0097]
设计自适应律为:
[0098][0099][0100][0101]
s400、根据所述虚拟控制器模型、所述虚拟自适应律、所述模糊自适应触发控制器模型及所述触发自适应律对单连杆机械臂的执行器进行控制。
[0102]
如图2所示,虚拟控制器模型应用于虚拟控制器,虚拟控制器包含有自适应律;模糊自适应触发控制器模型应用于模糊自适应触发控制器,模糊自适应触发控制器包含有触发自适应律;本发明实施例中单连杆机械臂包括虚拟控制器及其对应的虚拟自适应律、模糊自适应触发控制器及其对应的触发自适应律共同组成控制器,控制器对执行器进行控制。
[0103]
实施本发明实施例包括以下有益效果:本发明实施例中的非线性模型考虑输入迟滞的影响,事件触发模型根据动态阈值进行更新,并根据误差模型及非线性模型确定虚拟控制虚拟控制器及虚拟自适应律,以及根据事件触发模型及非线性模型确定模糊自适应触发控制器模型及触发自适应律;从而实现迟滞的动态补充及节省通信资源,以及在有限时间内收敛。
[0104]
本发明实施例的系统稳定性分析如下。
[0105]
首先,选择lyapunov函数v
i
可表示为可表示为根据理论分析,对于任意0<κ
i
<1,存在一个正的常量其中a
i
和b
i
是常量,设
[0106][0107]
其中,0<κ
i
<1,0<β<1,当时,结合虚拟控制律和自适应律分析,根据理论分析可以得到
[0108][0109]
由式(18)可以推导出v
i
是有界的。z
i
,和都是有界的,另外θ
i
,τ和k都是常量,因此和也是有界的。同时,z1=y
‑
r和r是有界的,表明y是有界的。可以看出,x1在概率上是半全局一致有界的。α1由z1和组成,因此α1有界,意味着x1也是有界的。同理,x2都是有界的。这意味这控制律也有界。因此,闭环系统的所有输出和跟踪误差都是有界的。此外,上述结果需要满足根据上述分析,可以证明本技术提出的方法可以在有限时间内,使得所有的输出y1,y2都能定位到给定信号r1,r2的一个小区域。
[0110]
因为e(t
k
)=0,根据拉格朗日中值定理可以分析得到因此,在保证时间区间t
*
的下界满足情况下,系统可以有效地避免zeno行为。
[0111]
下面以一个具体实施例进行说明。
[0112]
参照图3的仿真流程图,首先确定参考输入r、初始跟踪误差、及控制器参数c1、c2;然后确定单连杆机械人手臂模型,初始化部分参数及确定触发自适应律然后确定跟踪误差模型,虚拟控制器的虚拟控制律α1α2;然后确定模糊自适应触发控制器的、
[0113]
控制律将上述确定的模型作用于事件触发器并进行迭代,迭代次数满足要求则仿真结束。
[0114]
设置干扰障碍为d
k
=sin(t);参考信号为r=sin(t)。
[0115]
模糊自适应控制器隶属度函数如下:
[0116][0117]
选择参数:γ1=γ2=1,q=1,γ1=γ2=1,a1=1,a2=10,ζ=1,λ1=0.8,λ2=0.8,c1=10,c2=15,σ=40,δ=0.2,m1=0.6,q=1;m=1;g=9.8;l=0.4;b=1;初始值x1(0)=0.3。
[0118]
图4
‑
图7为对应的仿真结果,仿真结果表明:该控制方法实现了单连杆机械臂的跟踪控制,且实现系统的全局一致有界状态,保证系统在有限时间内的性能。从图4和图5可以看出,在输出初值为0.3状态下,系统可以在有限时间内实现快速跟踪,使跟踪误差从0.3迅速接近与0,并保持在0.05的预期误差范围内波动,后续系统输出与参考输入几乎重合,实现精准跟踪。在图6中,虚线为连续控制信号输入,实线为阶梯式事件触发控制输入,由此可见,可以很好的节省带宽资源。图7中的结果显示,最低宽带为0.04s,最高宽带为0.31s,说明触发频率较低,可有效节省带宽资源。从表1可以看出,它在0到2秒之间节省了85.5%的带宽,在2到4秒之间节省了87%的带宽,在4到6秒之间节省了90.5%的带宽,在6到8秒之间节省了88%的带宽,在8到10秒之间节省了86.5%的带宽。它在10秒内节省87.5%的带宽。由此可以看出,该控制方法既实现了单臂的跟踪控制,又达到了节省带宽的效果。
[0119]
表1、单连杆机械臂随时间的触发次数
[0120]
时间(s)0
‑
22
‑
44
‑
66
‑
88
‑
10触发次数2926192427
[0121]
如图8所示,本发明实施例提供了一种单连杆机械臂的模糊自适应控制系统,包括:
[0122]
第一模型确定模块,用于建立单连杆机械臂的非线性模型及磁滞模型;所述非线性模型的输入为磁滞的线性函数;
[0123]
第二模型确定模块,用于根据误差模型及所述非线性模型确定虚拟控制器模型及虚拟自适应律;
[0124]
第三模型确定模块,用于根据所述非线性模型及事件触发模型确定模糊自适应触发控制器模型及触发自适应律;所述事件触发模型根据动态阈值进行更新;
[0125]
综合控制模块,用于根据所述虚拟控制器模型、所述虚拟自适应律、所述模糊自适应触发控制器模型及所述触发自适应律对单连杆机械臂的执行器进行控制。
[0126]
可见,上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0127]
如图9所示,本发明实施例还提供了一种单连杆机械臂的模糊自适应控制系统,包括:
[0128]
至少一个处理器;
[0129]
至少一个存储器,用于存储至少一个程序;
[0130]
当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述方法实施例所述的单连杆机械臂的模糊自适应控制方法步骤。
[0131]
可见,上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0132]
此外,本技术实施例还公开了一种计算机程序产品或计算机程序,计算机程序产品或计算机程序存储在计算机可读存介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机程序,处理器执行该计算机程序,使得该计算机设备执行上述单连杆机械臂的模糊自适应控制的方法。同样地,上述方法实施例中的内容均适用于本存储介质实施例中,本存储介质实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0133]
如图2所示,本发明实施例还提供了一种单连杆机械臂的模糊自适应控制系统,包括控制器、执行器及单连杆机械臂,所述执行器连接所述控制器及所述单连杆机械臂,所述控制器包括:
[0134]
至少一个处理器;
[0135]
至少一个存储器,用于存储至少一个程序;
[0136]
当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述的模糊自适应控制方法。
[0137]
可见,上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0138]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

