1.本实用新型涉及机器人技术领域,特别涉及一种消防机器人控制系统。
背景技术:
2.随着技术的发展,机器人的应用范围越来越大,例如可利用机器人进行消防等,从而保证消防人员的生命安全。消防机器人一般都是通过采集环境信息(例如火源、定位等)再输出相应的动作进行响应。
3.但信息的采集和动作信号的分析输出基本都是依靠一个mcu来进行的,这就有可能导致mcu处理性能下降,出现动作输出不及时的问题,降低了消防效率。
技术实现要素:
4.针对现有技术中消防机器人控制系统实时性较低的问题,本实用新型提出一种消防机器人控制系统,通过采用两个mcu,分别进行运动控制与传感采集,提高运动控制与传感采集的实时性。
5.为了实现上述目的,本实用新型提供以下技术方案:
6.一种消防机器人控制系统,控制器包括第一mcu和第二mcu;所述第一mcu用于控制传感器采集参数;所述第二mcu用于输出动作信号到对应设备。
7.优选的,所述传感器包括红外、超声和光电传感器。
8.优选的,所述传感器通过rs232和/或rs485与第一mcu双向连接。
9.优选的,所述动作信号包括ttl电平信号、数字信号、干节点信号和模拟信号。
10.优选的,还包括电源模块,所述电源模块包括降压芯片u2和正向低压降稳压器u3:
11.u2的bst端口与第二电容的一端连接,u2的sw端口和第二电容的另一端并联后分别与第四二极管的负极和第二电感的一端连接,第四二极管的正极接地;u2的gnd端口接地;
12.u2的vin端口分别与第九电阻的一端、第三电容的一端连接,第三电容的另一端接地;u2的en端口与第九电阻的另一端连接;
13.u2的fb端口分别和第十电阻的一端、第四电容的一端、第十三电阻的一端连接,第十三电阻的另一端和第十四电阻的一端连接,第十四电阻的另一端和第十五电阻的一端连接,第十五电阻的另一端接地;第十电阻的另一端和第十一电阻的一端连接,第十一电阻的另一端和第十二电阻的一端连接,第十二电阻的另一端和第四电容的另一端并联后分别和第二电感的另一端和第五电容的一端、第十六电阻的一端连接;第五电容的另一端接地;
14.第十六电阻的另一端分别与第六电容的一端、第七电容的一端和u3的vin端口连接;u3的gnd端口接地;u3的vout端口分别和第八电容的一端和3.3v电压连接;第八电容另一端、第六电容的另一端和第七电容的另一端并联后接地。
15.优选的,还包括抗干扰电路,所述抗干扰电路包括隔离收发模块u1、共模抑制线圈和气体放电管x1:
16.u1的rxd端口与第一电阻的一端连接,第一电阻的另一端与控制器的ecan_rx端口连接;u1的txd端口与第二电阻的一端连接,第二电阻的另一端与控制器的ecan_tx端口连接;u1的gnd端口接地;u1的vcc端口连接3.3v电压;
17.u1的canh端口与第三电阻的一端连接,第三电阻的另一端与共模抑制线圈的第一输入端连接;u1的canl端口与第四电阻的一端连接,第四电阻的另一端与共模抑制线圈的第二输入端连接;共模抑制线圈的第一输出端分别与第一二极管的负极、第二二极管的正极和第五电阻的一端连接,第五电阻的另一端分别与x1的第3端口、第七电阻的一端和ecan_h端口连接;共模抑制线圈的第二输出端分别与第三三极管的一端、第六电阻的一端连接;第一二极管的正极和第二二极管的负极并联后与第三三极管的另一端连接;第六电阻的另一端分别和x1的第1端口、第七电阻的另一端和ecan_l端口连接;
18.u1的cang端口与分别与第八电阻的一端和第一电容的一端连接,第八电阻的另一端和第一电容的另一端并联后分别与x1的第2端口和ecan_g端口连接。
19.综上所述,由于采用了上述技术方案,与现有技术相比,本实用新型至少具有以下有益效果:
20.本实用新型通过采用两个mcu,分别进行运动控制与传感采集,提高运动控制与传感采集的实时性,且提高消防机器人控制系统的处理效率,从而提高消防机器人控制系统的实时性。
附图说明:
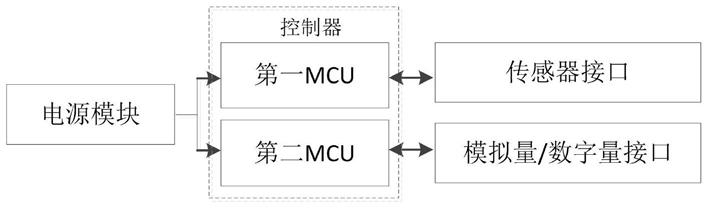
21.图1为根据本实用新型示例性的一种消防机器人控制系统示意图。
22.图2为根据本实用新型示例性的防干扰电路示意图。
23.图3为根据本实用新型示例性的电源模块电路示意图。
具体实施方式
24.下面结合实施例及具体实施方式对本实用新型作进一步的详细描述。但不应将此理解为本实用新型上述主题的范围仅限于以下的实施例,凡基于本
技术实现要素:
所实现的技术均属于本实用新型的范围。
25.在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.如图1所示,本实用新型提供一种消防机器人控制系统,包括电源模块、控制器、传感器接口和模拟量/数字量接口;电源模块的输出端与控制器的输入端连接,控制器分别和传感器接口和模拟量/数字量接口双向连接。
27.本实施例中,控制器包括第一mcu和第二mcu。第一mcu和传感器接口双向连接,用于控制传感器采集对应参数,参数包括定位、热能等;第二mcu和模拟量/数字量接口双向连接,用于输出动作信号到对应设备以执行响应的消防动作,例如拍照、行驶等。
28.通过采用两个mcu,分别进行运动控制与传感采集,提高运动控制与传感采集的实
时性,且提高消防机器人控制系统的处理效率,从而提高消防机器人工作实时性。
29.本实施例中,传感器接口可通过标准rs232、rs485与控制器双向连接,传感器包括任意i/o型的红外、超声、光电等传感器等。模拟量/数字量接口包括24v高速ttl、数字量输入、干节点输入、24v高速ttl数字量输出、4
‑
20ma模拟量输入。即控制系统具有丰富的接口,便于数据的传输。
30.本实施例中,各个模块用于完成不同的硬件功能,高度集成化、模块化,减少各个模块板间线路,增强了信息传输的可靠性。
31.本实施例中,如图2所示,还包括抗干扰电路,采用共模抑制线圈,可屏蔽大部分外界干扰,提高通讯稳定性,具体电路如下:
32.隔离收发模块u1(td301mcan)的rxd端口与第一电阻r1的一端连接,第一电阻r1的另一端与控制器(第二mcu)的ecan_rx端口连接;隔离收发模块u1的txd端口与第二电阻r2的一端连接,第二电阻r2的另一端与控制器(第二mcu)的ecan_tx端口连接;u1的gnd端口接地;u1的vcc端口连接3.3v电压;
33.u1的canh端口与第三电阻r3的一端连接,第三电阻r3的另一端与共模抑制线圈l1的第一输入端连接;u1的canl端口与第四电阻r4的一端连接,第四电阻r4的另一端与共模抑制线圈l1的第二输入端连接;共模抑制线圈l1的第一输出端分别与第一二极管d1的负极、第二二极管d2的正极和第五电阻r5的一端连接,第五电阻r5的另一端分别与气体放电管x1(b3d090l
‑
c)的第3端口、第七电阻r7的一端和ecan_h端口连接;共模抑制线圈l1的第二输出端分别与第三三极管(双向二极管)d3的一端、第六电阻r6的一端连接,第一二极管d1的正极和第二二极管d2的负极并联后与第三三极管d3的另一端连接;第六电阻r6的另一端分别和气体放电管x1的第1端口、第七电阻r7的另一端和ecan_l端口连接;
34.u1的cang端口与分别与第八电阻r8的一端和第一电容c1的一端连接,第八电阻r8的另一端和第一电容c1的另一端并联后分别与气体放电管x1的第2端口和ecan_g端口连接。
35.本实施例中,电源模块为超宽电压输入,18
‑
72v宽电压输入,可适配标准12v、24v、48v电池系统。如图3所示,电源模块电路包括降压芯片u2(mp2451dt
‑
lf
‑
z)和正向低压降稳压器u3(ams1117
‑
3.3):
36.u2的bst端口与第二电容c2的一端连接,u2的sw端口和第二电容c2的另一端并联后分别与第四二极管d4的负极和第二电感l2的一端连接,第四二极管d4的正极接地;u2的gnd端口接地;
37.u2的vin端口分别与第九电阻r9的一端、第三电容c3的一端连接,第三电容c3的另一端接地;u2的en端口与第九电阻r9的另一端连接;
38.u2的fb端口分别和第十电阻r10的一端、第四电容c4的一端、第十三电阻r13的一端连接,第十三电阻r13的另一端和第十四电阻r14的一端连接,第十四电阻r14的另一端和第十五电阻r15的一端连接,第十五电阻r15的另一端接地;第十电阻r10的另一端和第十一电阻r11的一端连接,第十一电阻r11的另一端和第十二电阻r12的一端连接,第十二电阻r12的另一端和第四电容c4的另一端并联后分别和第二电感l2的另一端和第五电容c5的一端、第十六电阻r16的一端连接;第五电容c5的另一端接地;
39.第十六电阻r16的另一端分别与第六电容c6的一端、第七电容c7的一端和u3的vin
端口连接;u3的gnd端口接地;u3的vout端口分别和第八电容c8的一端和3.3v电压连接;第八电容c8另一端、第六电容c6的另一端和第七电容c7的另一端并联后接地。
40.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

