1.本发明涉及电子电路领域,尤其涉及一种多轴控制器。
背景技术:
2.多轴控制系统是一种工业自动化控制系统,其主要用于控制机械臂等,可用于注塑、车床、冲压等行业。多轴控制系统包括示教器,用于用户的人机交互。
3.多轴控制器内部设置有cpu,cpu内部设置有flash存储器,flash存储器擦写次数有限,并且易受断电影响,导致多轴控制器的待存储数据丢失。
技术实现要素:
4.本发明实施例所要解决的技术问题在于,针对多轴控制器的cpu数据易丢失的问题,提供一种不易丢失数据的多轴控制器。
5.为了解决上述技术问题,本发明实施例提供了一种多轴控制系统,用于控制机械臂,其特征在于,包括中央处理器、单片机、示教器、驱动器和铁电存储器;所述中央处理器分别与所述驱动器、所述单片机、所述示教器电连接,所述单片机与所述铁电存储器电连接;所述单片机包括第一输出端口和第一输入端口;
6.所述中央处理器用于通过所述单片机的第一输入端口获取所述机械臂的实时状态信息,并根据所述机械臂的实时状态信息,确定所述机械臂的运动距离信息和运动模式信息;所述中央处理器用于向所述驱动器发送所述机械臂的运动距离信息,以使所述驱动器控制所述机械臂根据所述运动距离信息进行相应的距离的运动;所述中央处理器用于通过所述单片机的第一输出端口向所述机械臂发送运动模式信息;
7.所述中央处理器还用于通过所述单片机的第一输入端口获取机械臂的实时数据,并将所述实时数据发送至所述单片机,所述单片机将所述实时数据存储至所述铁电存储器;所述实时数据包括所述机械臂的运行数据和产量数据。
8.其中,所述中央处理器为intel j1900 cpu,所述单片机的型号为stm32f407,所述铁电存储器的型号为fm25v02
‑
gtr。
9.其中,所述中央处理器和所述单片机之间还依次串联有第一以太网控制器和第二以太网控制器;所述中央处理器和所述第一以太网控制器之间通过pcie端口连接,所述第一以太网控制器和第二以太网控制器之间通过ethernet端口连接,所述第二以太网控制器和所述单片机之间通过16位地址总线连接;
10.所述单片机和所述铁电存储器之间通过串行外设接口连接。
11.其中,所述第一输入端口和所述机械臂的控制器之间设置有光耦隔离器,所述机械臂的实时状态信息具体为开关量输入信号;所述第一输出端口和所述机械臂的控制器之间设置有光耦隔离器,所述运动模式信息具体为开关量输出信号;
12.所述单片机还包括第二输入端口和第二输出端口;所述机械臂的负载设备分别与所述第二输入端口、第二输出端口连接;
13.所述单片机用于接收所述负载设备的模拟量输入信号,并将所述模拟量输入信号转发至所述中央处理器;所述中央处理器用于通过所述单片机的所述第二输出端口发送所述模拟量输出信号至所述负载设备,以控制所述负载设备的工作状态;
14.所述负载设备和所述第二输入端口之间还连接有第一双运算放大器;所述负载设备和所述第二输出端口之间还连接有第二双运算放大器;所述负载设备为电焊机的控制器或喷涂设备的控制器。
15.其中,所述中央处理器和所述示教器之间还连接有第三以太网控制器;所述中央处理器和所述驱动器之间还连接有第四以太网控制器;
16.所述多轴控制系统还包括视觉设备、rs485收发器、rs232收发器、msata硬盘、vga连接头和usb连接头;所述中央处理器分别与所述视觉设备、所述rs485收发器、所述rs232收发器、所述msata硬盘、所述vga连接头、所述usb连接头连接。
17.其中,还包括数模转换器和二级运算放大器;
18.所述单片机通过spi接口与所述数模转换器的输入端连接,所述数模转换器的输出端与所述二级运算放大器的输入端连接,所述二级运算放大器的输出端与所述铁电存储器的输入端连接。
19.其中,所述数模转换器具体为ad5687rbuz芯片,所述ad5687rbuz芯片包括reset端;
20.所述多轴控制系统还包括第一电阻、二级管和第一电容;所述第一电阻的第一端连接电源,第二端连接第一电容的第一端;所述第一电容的第二端接地;所述二级管的阳级连接所述第一电阻的第二端,所述二级管的阴级连接所述第一电阻的第一端;所述reset端连接所述第一电阻的第二端。
21.其中,如权利要求5所述的多轴控制系统,其特征在于,还包括vga视频信号滤波器、vga视频信号调制编码差分放大驱动电路、vga差分放大视频信号输入端口、vga差分放大滤波器、vga差分解调转换电路、vga视频解码显示电路和vga视频解调信号滤波电路;
22.所述vga连接头的输出端连接所述vga视频信号滤波器的输入端,所述vga视频信号滤波器的输出端连接所述vga视频信号调制编码差分放大驱动电路的输入端,所述vga视频信号调制编码差分放大驱动电路的输出端连接所述vga差分放大视频信号输入端口,所述vga差分放大视频信号输入端口分别所述与所述vga差分放大滤波器、所述vga差分解调转换电路连接;所述vga差分解调转换电路的输出端与所述vga视频解码显示电路的输入端连接,所述vga视频解码显示电路的输出端与所述vga视频解调信号滤波电路连接。
23.9、如权利要求1所述的多轴控制系统,其特征在于,所述示教器包括从下至下依次层叠设置的面壳、胶圈、触摸屏、第一粘合层、第一泡棉、第二粘合层、lcd屏、第三粘合层、第二泡棉、压板、pcb板及底壳;
24.所述面壳和底壳共同形成第一容纳腔,用于容纳所述第一粘合层、所述第一泡棉、所述第二粘合层、lcd屏、所述第三粘合层、所述第二泡棉、所述压板和所述pcb板;
25.所述胶圈面对所述面壳的一面设置有至少3个条形凹槽;
26.所述pcb板相对所述底壳悬空,所述pcb板的四角和所述底壳之间通过螺钉固定;
27.所述压板的板内区域设置有多个第一螺孔,用于通过螺钉与所述pcb板固定连接;所述压板的周缘外的设置有多个第二螺孔,用于通过螺钉与面壳固定连接;所述压板的板
内区域还设置有多个通槽;
28.所述面壳上设置有用于容纳胶圈的容纳槽,所述胶圈设置在容纳槽中,且所述胶圈的厚度大于所述槽的深度,以使所述胶圈从所述容纳槽中凸出;
29.所述示教器还包括线缆、椎形橡胶结构、和设置于所述下壳体内部的线缆固定结构;所述线缆固定结构与所述下壳体共同形成封闭空间;所述线缆由所述椎形橡胶结构包裹后穿出,所述线缆固定结构为中空结构,所述椎形橡胶结构嵌入所述线缆固定结构中,且所述椎形橡胶结构与所述线缆固定结构过盈配合。
30.实施本发明实施例,具有如下有益效果:
31.本发明实施例通过设置铁电存储器将机械臂的运行数据和产量数据通过单片机存储至铁电存储器,可以不受掉电影响,在系统完全掉电之前完成对前述数据的存储。另外通过单片机可以形成对中央处理器的功能进行扩展。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
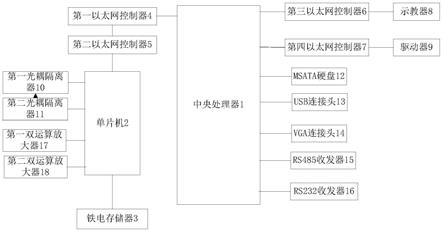
33.图1是本发明提供的多轴控制器的第一实施例的电路结构示意图;
34.图2是本发明提供的多轴控制器的第二实施例的电路结构示意图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.请参见图1,是本发明的多轴控制系统的结构示意图。
37.如图1所示,多轴控制系统包括:中央处理器1、单片机2、示教器8、驱动器和铁电存储器。中央处理器1分别与驱动器、单片机2、示教器8电连接,单片机2与铁电存储器电连接;单片机2包括第一输出端口和第一输入端口。具体地,中央处理器1为intel j1900 cpu,单片机2的型号为stm32f407,铁电存储器的型号为fm25v02
‑
gtr。
38.中央处理器1用于通过单片机2的第一输入端口获取机械臂的实时状态信息,并根据机械臂的实时状态信息,确定机械臂的运动距离信息和运动模式信息;中央处理器1用于向驱动器发送机械臂的运动距离信息,以使驱动器控制机械臂根据运动距离信息进行相应的距离的运动;中央处理器1用于通过单片机2的第一输出端口向机械臂发送运动模式信息。具体地,运动模式信息可以为抓、握、松开等。运动距离信息为机械臂需要移动的距离信息。实时状态信息可以为机械臂当前的位置信息,以及机械臂的当前的运动速度信息及当前的运动方向信息。
39.中央处理器1还用于通过单片机2的第一输入端口获取机械臂的实时数据,并将实时数据发送至单片机2,单片机2将实时数据存储至铁电存储器;实时数据包括机械臂的运
行数据和产量数据。中央处理器1通过获取机械臂的工作量数据,进而能够确定机械臂工作时产生的产品的产量数据。
40.本发明实施例通过设置铁电存储器将机械臂的运行数据和产量数据通过单片机2存储至铁电存储器,可以不受掉电影响,在系统完全掉电之前完成对前述数据的存储。另外通过单片机2可以形成对中央处理器1的功能进行扩展。例如单片机2可以支持提供can总线通讯端口、编码器通讯端口、模拟量输入输出端口。而很多类型的中央处理器1如x86架构的cpu则不支持上述端口。
41.优选地,中央处理器1和单片机2之间还依次串联有第一以太网控制器4和第二以太网控制器5;中央处理器1和第一以太网控制器4之间通过pcie端口连接,第一以太网控制器4和第二以太网控制器5之间通过ethernet端口连接,第二以太网控制器5和单片机2之间通过16位地址总线连接;单片机2和铁电存储器之间通过串行外设接口连接。第一以太网控制器4的型号为intel i211。第二以太网控制器5的型号为w5300。第一以太网控制器4和第二以太网控制器5之间的通过100m ethernet通讯。值得注意的是,本发明的单片机2和x86cpu之间还预留有uart串口通讯端口。
42.其中,第一输入端口和机械臂的控制器之间设置有第一光耦隔离器10,机械臂的实时状态信息具体为开关量输入信号;第一输出端口和机械臂的控制器之间设置有第二光耦隔离器11,运动模式信息具体为开关量输出信号;单片机2还包括第二输入端口和第二输出端口;机械臂的负载设备分别与第二输入端口、第二输出端口连接;单片机2用于接收负载设备的模拟量输入信号,并将模拟量输入信号转发至中央处理器1;中央处理器1用于通过单片机2的第二输出端口发送模拟量输出信号至负载设备,以控制负载设备的工作状态。负载设备和第二输入端口之间还连接有第一双运算放大器17;负载设备和第二输出端口之间还连接有第二双运算放大器18;中央处理器1可以通过单片机2的第二输出端口接收来自负载设备的模拟量输出信号。具体地,上述模拟量输出信号和模拟量输入信号可以为功率信息,中央处理器1可以实时获取负载设备的功率信息,并根据获取的机械臂的运行数据和产量数据,在预设负载设备的功率数据库,查询对应的负载设备下一阶段的输出功率信息,并通过单片机2的第二输出端口将该输出功率信息发送至负载设备,以使负载设备输出对应的功率。负载设备可以为电焊机的控制器或喷涂设备的控制器。其中开关量输入信号可以为24路输入。开关量输出信号可以为16路输入。负载设备的控制器可以固定设置在机械臂上。
43.其中,中央处理器1和示教器8之间还连接intel i211有第三以太网控制器6;中央处理器1和驱动器之间还连接有第四以太网控制器7。第三以太网控制器6和第四以太网控制器7的型号为均为intel i211。x86cpu和第三以太网控制器6之间通过pcie端口连接。第三以太网控制器6和示教器8之间通过ethernet网络通讯。86cpu和第四以太网控制器7之间通过pcie端口连接,第四以太网控制器7和驱动器之间可以通过ethercat网络通讯。
44.多轴控制系统还包括视觉设备、rs485收发器15、rs232收发器16、msata硬盘12、vga连接头14和usb连接头13;中央处理器1分别与视觉设备、rs485收发器15、rs232收发器16、msata硬盘12、vga连接头14、usb连接头13连接。msata硬盘12用于存储系统数据,具体来讲为系统运行数据和功能参数数据。
45.其中,多轴控制系统还包括数模转换器和二级运算放大器;单片机2通过spi接口
与数模转换器的输入端连接,数模转换器的输出端与二级运算放大器的输入端连接,二级运算放大器的输出端与铁电存储器的输入端连接。
46.其中,数模转换器具体为ad5687rbuz芯片,ad5687rbuz芯片包括reset端;多轴控制系统还包括第一电阻、二级管和第一电容;第一电阻的第一端连接电源,第二端连接第一电容的第一端;第一电容的第二端接地;二级管的阳级连接第一电阻的第二端,二级管的阴级连接第一电阻的第一端;reset端连接第一电阻的第二端。
47.多轴控制系统还包括vga视频信号滤波器17、vga视频信号调制编码差分放大驱动电路18、vga差分放大视频信号输入端口19、vga差分放大滤波器21、vga差分解调转换电路10、vga视频解码显示电路22和vga视频解调信号滤波电路23。
48.如图2的所示,vga连接头14的输入端连接中央处理器,其输出端连接vga视频信号滤波器17的输入端。vga视频信号滤波器17的输出端连接vga视频信号调制编码差分放大驱动电路18的输入端,vga视频信号调制编码差分放大驱动电路18的输出端连接vga差分放大视频信号输入端口19,vga差分放大视频信号输入端口19分别与vga差分放大滤波器21、vga差分解调转换电路20连接;vga差分解调转换电路20的输出端与vga视频解码显示电路22的输入端连接,vga视频解码显示电路22的输出端与vga视频解调信号滤波电路23连接。通过上述差分电路的加入,可以减少vga连接头至vga视频解调信号滤波电路之间的干扰信号,提高本系统中vga视频解调信号的抗干扰能力。
49.此外,多轴控制器的示教器8包括从下至下依次层叠设置的面壳、胶圈、触摸屏、第一粘合层、第一泡棉、第二粘合层、lcd屏、第三粘合层、第二泡棉、压板、pcb板及底壳;面壳和底壳共同形成容纳腔,用于容纳第一粘合层、第一泡棉、第二粘合层、lcd屏、第三粘合层、第二泡棉、压板和pcb板;胶圈面对面壳的一面设置有至少3个条形凹槽;pcb板相对底壳悬空,pcb板的四角和底壳之间通过螺钉固定;压板的板内区域设置有多个第一螺孔,用于通过螺钉与pcb板固定连接;压板的周缘外的设置有多个第二螺孔,用于通过螺钉与面壳固定连接;压板的板内区域还设置有多个通槽;面壳上设置有用于容纳胶圈的容纳槽,胶圈设置在容纳槽中,且胶圈的厚度大于槽的深度,以使胶圈从容纳槽中凸出。示教器8还包括线缆、椎形橡胶结构、和设置于下壳体内部的线缆固定结构;线缆固定结构与下壳体共同形成封闭空间;线缆由椎形橡胶结构包裹后穿出,线缆固定结构为中空结构,椎形橡胶结构嵌入线缆固定结构中,且椎形橡胶结构与线缆固定结构过盈配合。
50.通过胶圈的多个条形凹槽的凹槽壁部可以形成多道密封防护,加强密封性;同时胶圈还能起到抗震作用;同时第一泡棉、第二泡棉都能起到缓冲抗震作用,可以保护触摸屏、lcd屏;此外pcb板一面悬空,另一面通过螺钉与压板固定连接,压板的板内区域还设置有多个通槽,可以增加压板的韧性,防止变型,从而进一步增加pcb板的保护能力。
51.其中,示教器8正面设置触控显示屏,背面设置有两个对称的凸起结构,一手柄连接在两个凸起结构之间;手柄为中间对称结构,其包括依次连接的第一导角部,弧形连接部和第二导角部,弧形连接部为长条形;凸起结构、第一导角部和第二导角部的均为轮廓重叠一致的弧形导角结构;弧形连接部与第一导角部的之间夹角在85至115度之间;一凸起结构的相对两侧分别设置有usb出口和安全开关出口,凸起结构的内部形成容纳腔,用于容纳usb接口和安全开关;安全开关用于控制及保护多轴控制系统。
52.本发明实施例的凸起结构一方面为手柄提供了支撑作用,同时,还可以用于容纳
usb接口和安全开关,增加了示教器的内部存储空间。同时将usb接口设置在凸起结构上起到了如下有益效果:通过在凸起结构上设置usb连接器的出口,可以起到很好的防尘作用,同时这种隐藏式设计可以保护安全开关与usb端口不容易碰撞损坏。
53.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

