1.本发明涉及货运列车自动驾驶系统技术领域,更具体地说,涉及货运列车自动驾驶仿真测试系统及方法。
背景技术:
2.列车自动驾驶技术作为轨道交通装备智能化的前沿技术和典型应用,已经在轨道交通行业中得到充分关注与快速发展。列车自动驾驶技术所带来的的便利性、高效率、绿色环保等优势给轨道交通领域带来极大的技术变革。通过将司机所执行的工作完全由自动化、高度集中的控制系统替代,提升了列车安全性、准点性、平稳性、舒适性及节能性。
3.目前,通过现场测试的方式,对货运列车自动驾驶系统进行性能测试;现场测试的方式需要投入大量的人力、物力、财力等,且需要的时间较长。
技术实现要素:
4.有鉴于此,本发明提出货运列车自动驾驶仿真测试系统及方法,欲实现对货运列车自动驾驶系统的仿真测试,进而减少货运列车自动驾驶系统测试的人力、物力和财力等,以及提高货运列车自动驾驶系统的性能测试效率。
5.为了实现上述目的,现提出的方案如下:
6.第一方面,提供一种货运列车自动驾驶仿真测试系统,包括:信号系统仿真子系统、货运列车控制网络仿真子系统和货运列车运行仿真子系统;
7.所述货运列车控制网络仿真子系统包括实物设备、仿真设备和陪试转换模块;
8.所述实物设备包括中央控制单元、存储记录单元和司机显示单元;
9.所述仿真设备包括制动控制系统、牵引电传动系统和货运列车控制网络输入输出;
10.所述实物设备与所述仿真设备之间的通信,通过所述陪试转换模块进行协议转换;
11.所述信号系统仿真子系统,用于为待测货运列车自动驾驶系统提供线路数据、线路信号信息、货运列车位置和货运列车速度;
12.所述货运列车控制网络仿真子系统,用于根据所述待测货运列车自动驾驶系统输出的控制目标值,生成对应的控制指令并传输至所述货运列车运行仿真子系统;
13.所述货运列车运行仿真子系统,用于根据预设的货运列车参数生成货运列车仿真模型,并根据所述控制指令对所述货运列车仿真模型施加对应的操作;
14.所述货运列车运行仿真子系统,还用于根据货运列车仿真模型输出的当前速度,预设的线路数据,以及货运列车的编组类型和组成,计算得到货运列车运行数据,并将所述货运列车运行数据通过所述货运列车控制网络仿真子系统传输至所述待测货运列车自动驾驶系统。
15.可选的,所述信号系统仿真子系统还包括:
16.人机交互单元,用于供用户对线路、线路信号、货运列车位置和货运列车速度进行设定。
17.可选的,所述实物设备之间通过mvb进行通信;
18.所述虚拟设备之间通过以太网进行通信;
19.所述货运列车控制网络仿真子系统与所述待测货运列车自动驾驶系统之间通过mvb进行通信。
20.可选的,所述司机显示单元,用于实时显示所述货运列车运行数据,所述货运列车运行数据包括加速度、速度和合力。
21.可选的,所述货运列车控制网络仿真子系统还包括:
22.人机交互单元,用于供用户对线路、线路信号、货运列车位置和货运列车速度的设定,以及供用户进行仿真启动和停止的触发。
23.可选的,所述货运列车运行仿真子系统还包括:
24.人机交互单元,用于供用户对所述制动控制系统、所述牵引电传动系统和所述货运列车控制网络输入输出进行控制。
25.第二方面,提供一种基于第一方面中的货运列车自动驾驶仿真测试系统的货运列车自动驾驶仿真测试方法,包括:
26.信号系统仿真子系统为待测货运列车自动驾驶系统提供线路数据、线路信号信息、货运列车位置和货运列车速度;
27.货运列车控制网络仿真子系统根据所述待测货运列车自动驾驶系统输出的控制目标值,生成对应的控制指令并传输至货运列车运行仿真子系统;
28.所述货运列车运行仿真子系统根据预设的货运列车参数生成货运列车仿真模型,并根据所述控制指令对所述货运列车仿真模型施加对应的操作;
29.所述货运列车运行仿真子系统根据货运列车仿真模型输出的当前速度,预设的线路数据,以及货运列车的编组类型和组成,计算得到货运列车运行数据,并将所述货运列车运行数据通过所述货运列车控制网络仿真子系统传输至所述待测货运列车自动驾驶系统。
30.可选的,所述货运列车控制网络仿真子系统的实物设备之间通过mvb进行通信;
31.所述货运列车控制网络仿真子系统的虚拟设备之间通过以太网进行通信;
32.所述货运列车控制网络仿真子系统与所述待测货运列车自动驾驶系统之间通过mvb进行通信。
33.可选的,所述货运列车控制网络仿真子系统的司机显示单元实时显示所述货运列车运行数据,所述货运列车运行数据包括加速度、速度和合力
34.与现有技术相比,本发明的技术方案具有以下优点:
35.上述技术方案提供的一种货运列车自动驾驶仿真测试系统及方法,系统包括信号系统仿真子系统、货运列车控制网络仿真子系统和货运列车运行仿真子系统;货运列车控制网络仿真子系统包括实物设备、仿真设备和陪试转换模块;实物设备包括中央控制单元、存储记录单元和司机显示单元。三个子系统的对外接口及运行软件可根据不同的货运列车车型的自动驾驶系统进行更改,从而实现对各种货运列车自动驾驶系统进行测试,减少了货运列车自动驾驶系统测试的人力、物力和财力等,以及提高了货运列车自动驾驶系统的性能测试效率。进一步的,对于中央控制单元和存储记录单元,可根据货运列车车型选择对
应的实物设备,尽可能还原了货运列车自动驾驶系统的外部关联系统及通信环境,进而可以精确排查出与通信有关的一些故障和缺陷。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
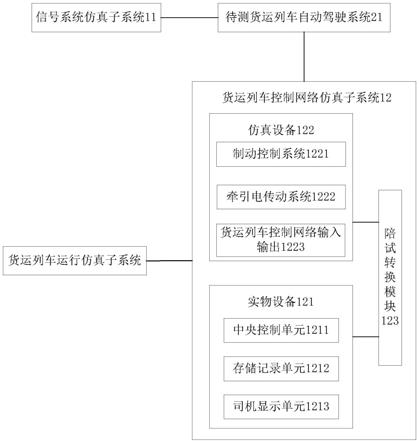
37.图1为本发明实施例提供的一种货运列车自动驾驶仿真测试系统的示意图。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.参见图1,为本实施例提供的一种货运列车自动驾驶仿真测试系统,该系统包括信号系统仿真子系统11、货运列车控制网络仿真子系统12和货运列车运行仿真子系统13。
40.货运列车控制网络仿真子系统12包括实物设备121、仿真设备122和陪试转换模块123。实物设备121与仿真设备122之间的通信,通过陪试转换模块123进行协议转换;实物设备121包括中央控制单元1211、存储记录单元1212和司机显示单元1213等;仿真设备122包括制动控制系统1221、牵引电传动系统1222和货运列车控制网络输入输出1223。在一个具体实施例中,实物设备之间通过mvb进行通信;虚拟设备之间通过以太网进行通信。
41.司机显示单元1213,用于实时显示货运列车运行数据,货运列车运行数据包括加速度、速度和合力。
42.信号系统仿真子系统11,用于为待测货运列车自动驾驶系统21提供线路数据、线路信号信息、货运列车位置和货运列车速度等信息。信号系统仿真子系统11包括机车信号系统仿真设备和相应的信号仿真软件。信号系统仿真子系统11还可以包括人机交互单元,用于供用户对线路、线路信号、货运列车位置和货运列车速度进行设定。
43.货运列车控制网络仿真子系统12,用于根据待测货运列车自动驾驶系统21输出的控制目标值,生成对应的控制指令并传输至货运列车运行仿真子系统13。具体的,待测货运列车自动驾驶系统21通过mvb与货运列车控制网络仿真子系统12通信,以进行数据交互。待测货运列车自动驾驶系统21向货运列车控制网络仿真子系统12输出牵引控制目标值或电制动控制目标值,列车管减压目标值,机车制动缸控制目标值和工况,中央控制单元根据牵引控制目标值或电制动控制目标值,以及工况控制输出对应的牵引力或电制力,制动控制系统1221根据列车管减压目标值和机车制动缸控制目标值进行列车管和机车制动缸压力控制。
44.货运列车控制网络仿真子系统12还可以包括:人机交互单元,用于供用户对所述制动控制系统、所述牵引电传动系统和所述货运列车控制网络输入输出进行控制。
45.货运列车运行仿真子系统13,用于根据预设的货运列车参数生成货运列车仿真模
型,并根据控制指令对货运列车仿真模型施加对应的操作;以及根据货运列车仿真模型输出的当前速度,预设的线路数据,以及货运列车的编组类型和组成,计算得到货运列车运行数据,并将货运列车运行数据通过货运列车控制网络仿真子系统12传输至待测货运列车自动驾驶系统21,作为待测货运列车自动驾驶系统21的输入。
46.线路数据包括线路坡道(包含坡道长度和坡道值)、线路弯道(包含弯道半径和长度)、隧道长度、桥梁长度,货运列车运行仿真子系统13根据货运列车的当前速度,货运列车的编组类型和组成,将线路数据转换为相应的坡道阻力,进而计算货运列车当前的加速度、合力、速度等货运列车运行数据。
47.货运列车的编组类型包括单元列车、1 1编组、2 0编组、2 2编组和3 0编组等。根据货运列车的编组类型确定货运列车中的机车个数,选择《牵引计算规程》中对应的数据建立机车牵引计算模型,即机车模型。根据货运列车的编组类型确定货运列车中包含车辆的个数和类型,选择《牵引计算规程》中对应的数据建立车辆计算模型,即车辆模型。将机车模型和车辆模型按照货运列车的编组类型进行组合形成货运列车仿真模型。
48.货运列车运行仿真子系统13还可以包括人机交互单元,用于供用户对供用户对线路、线路信号、货运列车位置和货运列车速度的设定,以及供用户进行仿真启动和停止的触发。操作人员通过货运列车运行仿真子系统13的人机交互单元选择与信号系统仿真子系统11一致的线路数据和货运列车位置等,然后开始仿真,即可进行货运列车运行状态的仿真和计算。
49.待测货运列车自动驾驶系统21,用于作为测试对象,通过自身对外接口与信号系统仿真子系统11和货运列车控制网络仿真子系统12进行数据交互,并通过自身的人机交互单元展示自动驾驶实时数据和获取人工操作指令。展示的自动驾驶实时数据包括但不限于示当前控车模式(即自动或人工)、运行模式(即慢行、点单或赶点)、当前速度、当前限速、时间、规划曲线和文本提示信息等。
50.本实施例还提供一种基于上述货运列车自动驾驶仿真测试系统的货运列车自动驾驶仿真测试方法,该货运列车自动驾驶仿真测试方法可以包括以下步骤:
51.(1)信号系统仿真子系统11为待测货运列车自动驾驶系统21提供线路数据、线路信号信息、货运列车位置和货运列车速度。
52.(2)货运列车控制网络仿真子系统12根据待测货运列车自动驾驶系统21输出的控制目标值,生成对应的控制指令并传输至货运列车运行仿真子系统13。
53.(3)货运列车运行仿真子系统13根据预设的货运列车参数生成货运列车仿真模型,并根据控制指令对货运列车仿真模型施加对应的操作。
54.(4)货运列车运行仿真子系统13根据货运列车仿真模型输出的当前速度,预设的线路数据,以及货运列车的编组类型和组成,计算得到货运列车运行数据,并将货运列车运行数据通过货运列车控制网络仿真子系统12传输至待测货运列车自动驾驶系统21。
55.以上所描述的系统实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
56.在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
57.本说明书中各个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
58.对本发明所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

