1.本发明涉及一种车辆自动驾驶技术,尤其是涉及一种用于网联车自动驾驶的交叉口引导方法及装置。
背景技术:
2.交通运输领域是全世界能源消耗和污染排放的主要来源之一。2014年,交通运输行业所造成的二氧化碳排放占全球总量的20.5%,仅次于电力与热力产业。 2016年,交通运输行业所消耗的能源占全球能源需求总量的26%,并且至今这一比例仍在不断上升。道路交通的能源消耗和二氧化碳排放更是占到整个交通运输业的72%和80%。因此,解决交通能耗和污染排放问题刻不容缓。生态驾驶辅助系统的研发是当前解决交通能耗和污染问题的主要应对措施。生态驾驶辅助系统以网联自动驾驶技术为基础,通过优化行驶间距、调节行车速度、减少停车次数等方法来节省燃油消耗。生态驾驶主要分为生态巡航驾驶以及交叉口绿色速度引导。前者适用于无信号灯控制的场景,如高速公路、快速路。后者则考虑交叉口信号灯的影响,通过协调网联自动驾驶汽车的加速度、速度和交叉口信号配时,从而实现节约油耗的目的。随着车路协同技术的发展,网联自动驾驶车辆能够实时获得信号配时信息,这为交叉口绿色速度引导技术的发展起到了巨大推动作用。
3.现有实现交叉口绿色速度引导的生态驾驶辅助系统主要采用优化控制的方法,但是目前的方法存在以下缺陷:
4.现有的生态驾驶辅助只能实现网联自动驾驶汽车的纵向自动化,车辆的换道和超车需要驾驶员介入,当前方有慢速车辆阻碍时,网联自动驾驶车辆只能降速跟驰,这时生态驾驶辅助系统几乎完全失效。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于网联车自动驾驶的交叉口引导方法、装置及介质,可自动换道超车,安全性高,节能环保。
6.本发明的目的可以通过以下技术方案来实现:
7.一种用于网联车自动驾驶的交叉口引导方法,具体为:
8.获取第一网联车和第二网联车的交通数据,所述的第二网联车为与第一网联车之间的距离在设定距离内的网联车,所述的交通数据包括位置、速度和偏航角;
9.建立第一网联车的车辆系统动力学模型该模型具体为:
[0010][0011]
其中,z为系统状态向量,包括第一网联车的交通数据以及第一网联车和第二网联车之间的距离,该距离根据交通数据获取,u为系统控制输入,包括第一网联车的纵向加速度a
x
和方向盘转角δ
f
,ω为随机噪声,包括第二网联车的速度,a、 b和d分别为系统矩阵、控制矩阵和噪声矩阵;
[0012]
建立双目标成本函数,通过双目标成本函数求解a
x
和δ
f
,根据求解的a
x
和δ
f
控制第
一网联车行驶,基于车辆系统动力学模型以及获取的系统控制输入获取第一网联车的最佳行驶轨迹,根据第一网联车的纵向加速度a
x
和方向盘转角δ
f
,通过 vt
‑
micro模型计算第一网联车的油耗量;
[0013]
通过控制a
x
和δ
f
,可实现对第一网联车的纵横向耦合控制,使得第一网联车通过交叉口时具有自动换道超车的功能,避免了在第一网联车遭遇前方有慢行车辆阻碍时生态驾驶辅助系统失效的问题,同时加入了随机噪声,考虑了实际道路交通环境的不确定性,将第一网联车的行驶状态视为服从一定概率分布的随机变量,把具有不确定性的碰撞约束转化为线性概率约束,提高了自动控制的准确性,安全性高。
[0014]
进一步地,以第一网联车的燃油消耗和行车速度为目标,建立双目标成本函数,减少车辆行驶机动性的损失,双目标成本函数表述为拉格朗日问题,所述的双目标成本函数具体为:
[0015][0016]
其中,t0为第一网联车到达交叉口停止线的时刻,t
f
为车辆通过交叉口停止线的时刻,β为权重系数。
[0017]
建立双目标成本函数的行驶时间约束和线性碰撞约束;
[0018]
获取交叉口信号配时信息,该信息包括信号周期t、红灯时长t
r
和绿灯时长t
g
,为确保第一网联车在绿灯期间顺利通过交叉口,故基于交叉口信号配时信息,以及速度和加速度限制对第一网联车的行驶时间进行约束,所述的行驶时间约束具体为:
[0019]
若第一网联车在交叉口的红灯期间到达,则:
[0020]
t
r
‑
t
ar
≤t
f
≤t
‑
t
ar
[0021]
若第一网联车在交叉口的绿灯期间到达,则:
[0022][0023]
其中,t
ag
为第一网联车在绿灯期间的到达时刻,t
*
为在最大加速度和最大速度的限制下第一网联车的极限行驶时间;
[0024]
由于第二网联车的驾驶人员的行为存在不确定性,故设第二网联车的速度以及位置服从正态分布,设定车辆之间的安全间距以及未发生碰撞的概率值p,建立线性碰撞约束,所述的线性碰撞约束具体为:
[0025]
满足第一线性碰撞约束条件或第二线性碰撞约束条件;
[0026]
所述的第一线性碰撞约束条件为:
[0027][0028]
所述的第二线性碰撞约束条件为:
[0029][0030]
其中,为纵向运动梯度,为横向运动梯度,z
d
为确定性状态向量,
为第一网联车与第i辆第二网联车的纵向安全间距,为第一网联车与第i辆第二网联车的横向安全间距,为纵向反分布函数参数,为横向反分布函数参数。
[0031]
双目标成本函数兼顾第一网联车的燃油消耗以及驾驶机动性,实现第一网联车经过交叉口的油耗和行驶时间的双目标优化,在节约行车油耗,实现节能减排的同时,使第一网联车的车辆机动性能的损失尽可能小,保障车辆的行驶既环保又高效。
[0032]
进一步地,所述的ω、a、b和d的计算公式为:
[0033][0034][0035][0036][0037]
其中,z为系统状态向量,u为系统控制输入,ω为随机噪声,表示第i辆第二网联车的纵向速度,表示第i辆第二网联车的横向速度,m为第一网联车的质量,表示第一网联车的纵向速度,c
f
和c
r
分别为第一网联车的前轮和后轮的侧偏刚度,l
f
和l
r
分别为第一网联车的前轴和后轴到第一网联车重心的距离,i
z
为转动惯量,κ为道路坡度。
[0038]
进一步地,通过最优控制律求解目标函数,所述的最优控制律具体为:
[0039][0040][0041]
其中,a
xmin
为纵向最大减速度,a
xmax
为纵向最大加速度,λ1为纵向速度的协态变量,δ
fmin
为方向盘向左最大转角,δ
fmax
为方向盘向右最大转角,λ2为横向速度的协态变量,λ3为偏航角速度的协态变量。
[0042]
进一步地,根据第一网联车的纵向加速度a
x
和方向盘转角δ
f
,通过vt
‑
micro 模型计算第一网联车的油耗量。
[0043]
一种采用所述的交叉口引导方法的交叉口引导装置,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器调用所述程序指令能够执行任一所述的交叉口引导方法。
[0044]
一种计算机可读存储介质,包括计算机程序,所述计算机程序能够被处理器执行以实现任一所述的交叉口引导方法。
[0045]
与现有技术相比,本发明具有以如下有益效果:
[0046]
(1)本发明建立第一网联车的车辆系统动力学模型,该模型的系统状态向量包括第一网联车的交通数据以及第一网联车和第二网联车之间的距离,该模型的系统控制输入,包括第一网联车的纵向加速度a
x
和方向盘转角δ
f
,通过双目标成本函数求解a
x
和δ
f
,根据求解的a
x
和δ
f
控制第一网联车行驶,可实现对第一网联车的纵横向耦合控制,使得第一网联车通过交叉口时具有自动换道超车的功能,避免了在第一网联车遭遇前方有慢行车辆阻碍时生态驾驶辅助系统失效的问题;
[0047]
(2)本发明车辆系统动力学模型加入了随机噪声,由于人工驾驶车辆的的驾驶行为存在随机性,会对生态驾驶辅助产生不确定性干扰,影响驾驶安全,随机噪声考虑了实际道路交通环境的不确定性,将第一网联车的行驶状态视为服从一定概率分布的随机变量,把具有不确定性的碰撞约束转化为线性概率约束,提高了自动控制的准确性,安全性高;
[0048]
(3)本发明双目标成本函数兼顾第一网联车的燃油消耗以及驾驶机动性,实现第一网联车经过交叉口的油耗和行驶时间的双目标优化,在节约行车油耗,实现节能减排的同时,使第一网联车的车辆机动性能的损失尽可能小,保障车辆的行驶既环保又高效。
附图说明
[0049]
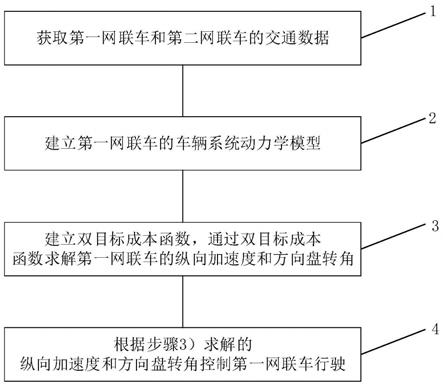
图1为本发明的方法流程图;
[0050]
图2为最佳行驶轨迹示意图;
[0051]
图3为第一网联车的δ
f
‑
t图;
[0052]
图4为第一网联车的a
x
‑
t图。
具体实施方式
[0053]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0054]
实施例1
[0055]
一种用于网联车自动驾驶的交叉口引导方法,如图1,具体为:
[0056]
1)通过gps技术获取第一网联车的交通数据,通过v2i通信获得第二网联车的交通数据,第二网联车为与第一网联车之间的距离在设定距离内的网联车,交通数据包括位置、速度和偏航角;
[0057]
2)建立第一网联车的车辆系统动力学模型该模型具体为:
[0058][0059]
其中,z为系统状态向量,包括第一网联车的交通数据以及第一网联车和第二网联车之间的距离,该距离根据交通数据获取,u为系统控制输入,包括第一网联车的纵向加速度a
x
和方向盘转角δ
f
,ω为随机噪声,包括第二网联车的速度,a、 b和d分别为系统矩阵、控制矩阵和噪声矩阵;
[0060]
3)建立双目标成本函数,通过双目标成本函数求解a
x
和δ
f
;
[0061]
4)根据步骤3)求解的a
x
和δ
f
控制第一网联车行驶;
[0062]
基于车辆系统动力学模型以及获取的系统控制输入获取第一网联车的最佳行驶轨迹,根据第一网联车的纵向加速度a
x
和方向盘转角δ
f
,通过vt
‑
micro模型计算第一网联车的油耗量;
[0063]
通过控制a
x
和δ
f
,可实现对第一网联车的纵横向耦合控制,使得第一网联车通过交叉口时具有自动换道超车的功能,避免了在第一网联车遭遇前方有慢行车辆阻碍时生态驾驶辅助系统失效的问题,同时加入了随机噪声,考虑了实际道路交通环境的不确定性,将第一网联车的行驶状态视为服从一定概率分布的随机变量,把具有不确定性的碰撞约束转化为线性概率约束,提高了自动控制的准确性,安全性高。
[0064]
第二网联车与交叉口的路侧设备进行v2i通信,v2i通信范围为交叉口前300m,第一网联车通过路侧设备获取第二网联车的交通数据。
[0065]
以第一网联车的燃油消耗和行车速度为目标,建立双目标成本函数,减少车辆行驶机动性的损失,双目标成本函数表述为拉格朗日问题,双目标成本函数具体为:
[0066][0067]
其中,t0为第一网联车到达交叉口停止线的时刻,t
f
为车辆通过交叉口停止线的时刻,β为权重系数,可通过调整a
x
和δ
f
的权重,调整油耗和车辆机动性的优先权。
[0068]
建立双目标成本函数的行驶时间约束和线性碰撞约束;
[0069]
通过v2i通信获取交叉口信号配时信息,该信息包括信号周期t、红灯时长t
r
和绿灯时长t
g
,为确保第一网联车在绿灯期间顺利通过交叉口,故基于交叉口信号配时信息,以
及速度和加速度限制对第一网联车的行驶时间进行约束,行驶时间约束具体为:
[0070]
若第一网联车在交叉口的红灯期间到达,则:
[0071]
t
r
‑
t
ar
≤t
f
≤t
‑
t
ar
[0072]
若第一网联车在交叉口的绿灯期间到达,则:
[0073][0074]
其中,t
ag
为第一网联车在绿灯期间的到达时刻,t
*
为在最大加速度和最大速度的限制下第一网联车的极限行驶时间;
[0075]
由于第二网联车的驾驶人员的行为存在不确定性,故设第二网联车的速度以及位置服从正态分布,设定车辆之间的安全间距以及未发生碰撞的概率值p,建立线性碰撞约束,线性碰撞约束具体为:
[0076]
满足第一线性碰撞约束条件或第二线性碰撞约束条件;
[0077]
第一线性碰撞约束条件为:
[0078][0079]
第二线性碰撞约束条件为:
[0080][0081]
其中,为纵向运动梯度,为横向运动梯度,z
d
为确定性状态向量,为第一网联车与第i辆第二网联车的纵向安全间距,为第一网联车与第i辆第二网联车的横向安全间距,为纵向反分布函数参数,为横向反分布函数参数,和通过概率值p以及概率分布函数确定。
[0082]
双目标成本函数兼顾第一网联车的燃油消耗以及驾驶机动性,实现第一网联车经过交叉口的油耗和行驶时间的双目标优化,在节约行车油耗,实现节能减排的同时,使第一网联车的车辆机动性能的损失尽可能小,保障车辆的行驶既环保又高效。ω、a、b和d的计算公式为:
[0083]
[0084][0085][0086][0087]
其中,表示第i辆第二网联车的横向速度,m为第一网联车的质量,表示第一网联车的纵向速度,c
f
和c
r
分别为第一网联车的前轮和后轮的侧偏刚度,l
f
和l
r
分别为第一网联车的前轴和后轴到第一网联车重心的距离,i
z
为转动惯量,κ为道路坡度。
[0088]
通过最优控制律求解目标函数,最优控制律基于pontryagin极小值原理,具体为:
[0089][0090][0091]
其中,a
xmin
为纵向最大减速度,a
xmax
为纵向最大加速度,λ1为纵向速度的协态变量,
δ
fmin
为方向盘向左最大转角,δ
fmax
为方向盘向右最大转角,λ2为横向速度的协态变量,λ3为偏航角速度的协态变量。
[0092]
车辆系统动力学模型为时域优化控制模型,将车辆系统动力学模型转化为空间域优化控制模型,将车辆第一网联车纵向位置作为底层变量,时间作为模型状态变量,车辆系统动力学模型从末态自由问题转化为末态固定问题,便于求解,转化公式如下:
[0093][0094]
基于最优控制律和空间域优化控制模型,根据最优控制律,采用动态规划算法进行求解,获取第一网联车的纵向加速度和方向盘转角,控制第一网联车在通过交叉口时保持较小的油耗和机动性能损失。
[0095]
如图2,根据步骤3)求解的a
x
和δ
f
生成第一网联车的最佳行驶轨迹,图3和图4分别为该第一网联车的a
x
‑
t图和δ
f
‑
t图。
[0096]
实施例2
[0097]
一种采用交叉口引导方法的交叉口引导装置,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器调用所述程序指令能够执行实施例1任一所述的交叉口引导方法。
[0098]
实施例3
[0099]
一种计算机可读存储介质,包括计算机程序,所述计算机程序能够被处理器执行以实现实施例1任一所述的交叉口引导方法。
[0100]
实施例1、实施例2和实施例3提出了一种用于网联车自动驾驶的交叉口引导方法、装置及介质,建立第一网联车的车辆系统动力学模型以及双目标成本函数,通过最优控制律进行求解第一网联车的纵向加速度a
x
和方向盘转角δ
f
,可实现对第一网联车的纵横向耦合控制,使第一网联车具有自动换道超车,车辆系统动力学模型加入了随机噪声,提高了自动控制的准确性和安全性,双目标成本函数兼顾第一网联车的燃油消耗以及驾驶机动性,保障第一网联车的行驶既环保又高效。
[0101]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

