1.本发明涉及动化控制技术领域,具体涉及一种用于多轴伺服系统振动抑制的后置自适应输入整形方法。
背景技术:
2.在工业自动化生产加工过程中,往往应用各种各样的多轴伺服系统,如数控机床,4轴机器人,6轴机器人等。在具体的任务要求中,多轴伺服系统的末端需要安装具体的执行器,同时由于执行器存在固有的柔性,因此在末端停止时会产生较长时间的残余振动。这一现象会在多轴伺服系统高速运动急停的情况下更为明显,严重降低了末端执行器定位精度,延长了定位的等待时间,较大地降低了在批量自动化加工过程的工作效率。
3.输入整形器是一种抑制残余振动的前馈方法,但是该方法需要对系统参数如系统固有频率,阻尼比进行精确的辨识计算,才可以达到较好的抑振效果。实际工业上所用的多轴系统需要通过力锤激励实验进行测量得到系统参数,过程需要应用快速傅里叶变换,计算量繁复且由于部分多轴伺服系统如串联机器人的模态参数受到位姿影响,不同的轨迹模态参数会发生改变,因此无法通过力锤激励法测到最优的系统参数。同时,传统的输入整形器只能应用于单模态系统,在实际工业的多轴伺服系统往往是多模态的,因此抑振效果并不理想。
4.chu等人基于后置输入整形器的基本形式,在递归最小二乘过程中加入了恒定的遗忘因子,在迭代过程增加最近时刻观测数据在代价函数中的比重,提升了输入整形器的跟踪性能,但在实际环境噪声不稳定的情况下,恒定的遗忘因子无法确保优化得到最优的输入整形器(chu z,hu j.an improved recursive least square
–
based adaptive input shaping for zero residual vibration control of flexible system[j].advances in mechanical engineering,2016,8(4).)。
技术实现要素:
[0005]
为解决传统的前置输入整形器参数辨识困难以及部分多轴伺服系统模态参数随着位姿变化,无法准确辨识的问题,本发明提供了一种带自适应遗忘因子的后置输入整形器,在多轴伺服系统末端执行器上安装加速度传感器,将采集到的残余振动加速度信号作为输入,输入整形器最优系数向量作为输出,设计迭代优化算法,再根据代价函数对输入整形器系数向量的梯度向量设计自适应遗忘因子更新算法,提高算法在优化过程中跟踪性能,进而提升输入整形器的抑振效果。再由迭代优化输入整形器系数向量生成完整的输入整形器,并与期望轨迹进行卷积运算得到新的轨迹,最后将整形后的轨迹输入到控制系统中实现对残余振动的最优抑制。
[0006]
本发明的目的至少通过以下技术方案之一实现。
[0007]
一种多轴伺服系统振动抑制的后置自适应输入整形方法,包括以下步骤:
[0008]
s1、采集多轴伺服系统柔性末端在轨迹停止时的加速度传感器的信号;
…ꢀ
1]
t
,正学习速率α=5
×
10
‑5,遗忘因子上下限分别为λ
min
=0.855和λ
max
=0.975,其中n表示第n次迭代。
[0029]
进一步地,步骤s4中,归一化约束为g=[1 1
ꢀ…ꢀ
1]
t
,用于保证整形后的整形轨迹与原轨迹的幅值相同,起终点一致;自适应迭代算法以递归最小二乘(rls)为基础,再引入遗忘因子并基于其对于代价函数的标量梯度在rls迭代过程中嵌入遗忘因子的自适应更新算法,自适应迭代算法的流程包括以下步骤:
[0030]
s4.1、设定迭代变量λ(0),s(0),w(0)的初始值,并选定残余振动样本时间长度l;
[0031]
s4.2、更新增益向量k(n):
[0032][0033][0034]
s4.3、输入整形器输出先验估计:
[0035][0036]
s4.4、先验估计误差计算:
[0037][0038]
s4.5、更新输入整形器系数向量:
[0039][0040][0041]
s4.6、更新相关矩阵的逆矩阵
[0042][0043][0044]
s4.7、更新遗忘因子λ(n):
[0045][0046]
s4.8、逆相关矩阵对λ偏导数s(n)的更新:
[0047][0048]
s4.9、输入整形器系数向量对λ导数w(n)的更新:
[0049]
w(n)=[i
‑
k(n)ψ
t
(n)]w(n
‑
1) s(n)ψ(n)e(n);
[0050]
s4.10、令n=n 1,若n<l,则返回步骤s4.2进行下一次更新,否则算法结束并选择跟踪过程中最优的输入整形器系数向量。
[0051]
进一步地,步骤s4.10中,在算法结束后通过最小化期望输入整形器输出y
d
(n)与
输入整形器整形输出w(n)
t
x(n)的均方误差选择跟踪过程中最优的输入整形器系数向量:
[0052]
w
opt
(l)=[w0,w1,...,w
2n
]
t
。
[0053]
进一步地,步骤s5中,最优输入整形器具体如下:
[0054][0055]
其中,最优输入整形器作用的对象为多轴伺服系统各轴关于时间t的原始期望轨迹r(t);δ为单位脉冲函数,t
d
为脉冲时滞时间,根据具体多轴伺服系统,t
d
在一定范围内选择,将步骤s4中的优化得到的最优输入整形器系数向量代入公式(3)中,得到带自适应遗忘因子的后置输入整形器;
[0056]
应用该带自适应遗忘因子的后置输入整形器与原始轨迹进行卷积运算,从而得到新的整形轨迹,将整形轨迹输入到多轴伺服系统的控制器中,从而实现对多轴伺服系统末端柔性执行器残余振动的抑制。
[0057]
相对于现有技术,本发明的优势在于:
[0058]
(1)本发明提出的后置自适应输入整形方法,以残余振动信号作为算法输入,优化得到最优的输入整形器系数向量,再应用最优输入整形器对原轨迹进行整形。区别于传统输入整形器前馈的方式,采用反馈控制方式,避免了繁复的参数辨识过程,使得输入整形器抑振效果不再受参数辨识结果的精确度影响。
[0059]
(2)本发明在后置自适应输入整形方法中引入了遗忘因子,在迭代过程中对于最新的样本在代价函数中设置较大的权重,提高了输入整形器的跟踪性能。
[0060]
(3)本发明在引入遗忘因子的同时又引入遗忘因子在环境噪声未知情况下的自适应更新算法,进一步提升了后置输入整形器跟踪性能,并提升了输入整形器的适用性及抑振效果。
附图说明
[0061]
图1为本发明多轴伺服系统示意图;
[0062]
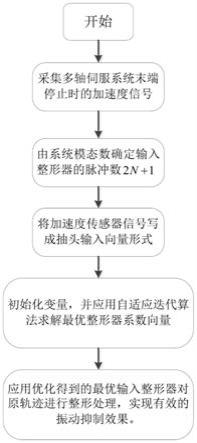
图2a为本发明一种用于多轴伺服系统的后置自适应输入整形方法流程示意图;
[0063]
图2b为本发明自适应迭代算法的流程图;
[0064]
图3为本发明后置自适应输入整形器应用流程图。
具体实施方式
[0065]
为进一步理解本发明,下面结合附图和实施例对本发明做进一步的说明,但是需要说明的是,本发明要求保护的范围并不局限于实施例表述的范围。
[0066]
实施例:
[0067]
一种多轴伺服系统振动抑制的后置自适应输入整形方法,如图2a所示,包括以下步骤:
[0068]
s1、采集多轴伺服系统柔性末端在轨迹停止时的加速度传感器的信号;
[0069]
如图1所示,在多轴伺服系统柔性末端安装加速度传感器,并在多轴伺服系统柔性末端的轨迹运行停止时延长加速度传感器的采样时间,采集多轴伺服系统柔性末端急停后
的残余振动对应的加速度传感器的信号。
[0070]
s2、确定输入整形器的脉冲数;
[0071]
根据多轴伺服系统实际结构确定模态数,假设多轴伺服系统有n个模态,则输入整形器的脉冲数设置为2n 1。
[0072]
s3、将加速度传感器信号滤波处理后写成抽头输入向量形式;
[0073]
应用巴特沃斯低通滤波器对加速度传感器的电压信号进行滤波处理,过滤掉加速度传感器本身存在的高频噪声,并按照公式对电压信号进行换算,电压信号换算加速度信号的公式为:
[0074][0075]
其中,g为重力加速度,v
a
为加速度传感器经过低通滤波后的电压值,单位为v,v
a0
为加速度传感器静止时对应的电压值,a为加速度值,单位为m/s2。
[0076]
残余振动的加速度信号的形式如下:
[0077]
ψ(i)=[a(i) a(i
‑
t
d
)
ꢀ…ꢀ
a(i
‑
kt
d
)]
t
;
ꢀꢀꢀ
(2)
[0078]
其中,ψ(i)为i时刻的抽头输入向量,a(i)为i时刻残余振动的加速度信号,k 1为输入整形器脉冲数,t
d
为离散时滞时间点数。
[0079]
s4、进行变量初始化,并应用自适应迭代算法迭代求解最优的输入整形器系数向量;
[0080]
首先定义遗忘因子构成的对角矩阵为:
[0081][0082]
再定义抽头输入向量x(n):
[0083]
x(n)=[ψ(1) ψ(2)
ꢀ…ꢀ
ψ(n)];
[0084]
则d
λ
(n)=x(n)λ(n)x
t
(n)称为抽头输入矩阵的时间平均相关矩阵,简称为相关矩阵。
[0085]
变量初始化如下:
[0086]
初始化相关矩阵的逆矩阵d0为恒定值,d0=107;
[0087]
输入整形器系数向量的初始值遗忘因子λ(n)的初始值λ(0)=0.975,中间变量相关矩阵的逆矩阵对λ偏导数s(n)的初始值s(0)=i,其中i为单位矩阵,输入整形器系数向量w(n)对λ的导数w(n)的初始值w(0)=[1 1
ꢀ…ꢀ
1]
t
,正学习速率α=5
×
10
‑5,遗忘因子上下限分别为λ
min
=0.855和λ
max
=0.975,其中n表示第n次迭代。
[0088]
归一化约束为g=[1 1
ꢀ…ꢀ
1]
t
,用于保证整形后的整形轨迹与原轨迹的幅值相同,起终点一致;自适应迭代算法以递归最小二乘(rls)为基础,再引入遗忘因子并基于其
对于代价函数的标量梯度在rls迭代过程中嵌入遗忘因子的自适应更新算法,如图2b所示,自适应迭代算法的流程包括以下步骤:
[0089]
s4.1、设定迭代变量λ(0),s(0),w(0)的初始值,并选定残余振动样本时间长度l;
[0090]
s4.2、更新增益向量k(n):
[0091][0092][0093]
s4.3、输入整形器输出先验估计:
[0094][0095]
s4.4、先验估计误差计算:
[0096][0097]
s4.5、更新输入整形器系数向量:
[0098][0099][0100]
s4.6、更新相关矩阵的逆矩阵
[0101][0102][0103]
s4.7、更新遗忘因子λ(n):
[0104][0105]
s4.8、逆相关矩阵对λ偏导数s(n)的更新:
[0106][0107]
s4.9、输入整形器系数向量对λ导数w(n)的更新:
[0108]
w(n)=[i
‑
k(n)ψ
t
(n)]w(n
‑
1) s(n)ψ(n)e(n);
[0109]
s4.10、令n=n 1,若n<l,则返回步骤s4.2进行下一次更新,否则算法结束并通过最小化期望输入整形器输出y
d
(n)与输入整形器整形输出w(n)
t
x(n)的均方误差选择跟踪过程中最优的输入整形器系数向量:
[0110]
w
opt
(l)=[w0,w1,...,w
2n
]
t
。
[0111]
s5、将优化得到的最优输入整形器与原始轨迹进行卷积运算得到新的整形轨迹,再将整形轨迹输入到多轴伺服系统中实现对柔性末端残余振动的有效抑制。
[0112]
最优输入整形器具体如下:
[0113][0114]
其中,最优输入整形器作用的对象为多轴伺服系统各轴关于时间t的原始期望轨迹r(t);δ为单位脉冲函数,t
d
为脉冲时滞时间,根据具体多轴伺服系统,t
d
在一定范围内选择,将步骤s4中的优化得到的最优输入整形器系数向量代入公式(3)中,得到带自适应遗忘因子的后置输入整形器;
[0115]
如图3所示,应用该带自适应遗忘因子的后置输入整形器与原始轨迹进行卷积运算,从而得到新的整形轨迹,将整形轨迹输入到多轴伺服系统的控制器中,从而实现对多轴伺服系统末端柔性执行器残余振动的抑制。
[0116]
本发明的上述实施例仅仅是为清楚地说明本发明所做的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实时方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替代和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

