1.本发明涉及一种智能小车,尤其涉及一种基于arduino的智能小车。
背景技术:
2.现有智能小车多采用两轮或四轮亚力克底盘,车身没有悬挂,只能在平整路面行驶,地面稍有起伏就会有轮子悬空打滑,几乎没有越障能力。小车转向通过两侧车轮不同旋转方向实现,转向精度差,灵活性不强。用作动力的直流电机难以调速,各轮之间速度不同,小车难以走直线。由于现有智能小车在前进和转向方面存在缺陷,其超声波避障功能需要小车处于静止状态才能运行,且由于转向角度不能控制,经常出现前冲碰撞和原地瞎转的情况。现有智能小车动力来源依赖电池,更换麻烦,不环保。
技术实现要素:
3.发明目的:本发明的目的在于提供一种灵活、实用,适应复杂的地形并可连续避障的基于arduino的智能小车。
4.技术方案:本发明的基于arduino的智能小车,包括车身、控制模块、支撑模块、悬挂模块和驱动模块;所述车身前端安装有舵机,舵机上安装超声波传感器,车身两侧设有太阳能电池板支架;所述控制模块选用arduino单片机,所述支撑模块包括三个伞形齿轮、三个轴套、两个长支臂和一个短支臂;所述轴套固定在车身上,长支臂和短支臂分别穿过轴套,长支臂的一端连接伞形齿轮、另一端与悬挂模块连接,短支臂的一端与伞形齿轮连接;所述悬挂模块包括一层倒v形车架和二层倒v形车架,一层倒v形车架连接中轮和后轮,二层倒v形车架连接前轮、长支臂和一层倒v形车架,所述一层倒v形车架和二层倒v形车架与车轮连接处安装有转向舵机;所述驱动模块包括车轮和驱动舵机。
5.进一步地,所述太阳能电池板支架为插槽式支架。
6.进一步地,所述转向舵机为180度的转向舵机。
7.进一步地,所述一层倒v形车架和二层倒v形车架的材质为pla(聚乳酸)。
8.进一步地,所述arduino单片机连接有车载sd卡。
9.进一步地,所述arduino单片机安装在车身底板的后端。
10.进一步地,所述车身的材质为pla(聚乳酸)。
11.进一步地,所述超声波传感器的型号为hc
‑
sr04。
12.进一步地,所述车轮的直径为6
‑
8cm。
13.进一步地,所述车轮表面设有凸起的纹路。
14.有益效果:与现有技术相比,本发明具有如下显著优点:本发明的小车采用灵活、实用、低成本的悬挂系统,使得小车能适应复杂的地形,并可越过一定的障碍。每一个轮子都单独通过舵机控制车轮转向,可以实现多种转向方式。每一个轮子都单独通过类似伺服电机的舵机驱动,可以保证转速一致。得益于优秀的行驶性能,本款小车可通过算法实现不停车连续避障。本款小车有两块像翅膀一样的太阳能电池板,搭配充电电路模块,可实现充
电供电智能切换,自发电运作,低碳环保。
附图说明
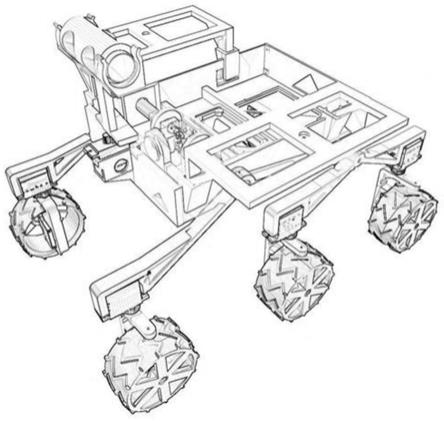
15.图1为本发明的总体结构示意图;
16.图2为本发明支撑模块的放大图;
17.图3为本发明悬挂模块部分的结构示意图;
18.图4为本发明舵机上安装的超声波传感器示意图;
19.图5为本发明驱动模块的结构示意图。
具体实施方式
20.下面结合附图对本发明的技术方案作进一步说明。
21.如图1所示,本发明的基于arduino的智能小车,包括车身、控制模块、支撑模块、悬挂模块和驱动模块。
22.如图2所示,其中,1
‑
支臂、2
‑
伞形齿轮、3轴套(与车体连接)、4
‑
16路舵机控制板安装位、5
‑
arduino uno安装位。中央支撑系统由三个伞形齿轮、轴套和支臂组成,当一侧车架受到地形影响发生旋转时,通过齿轮带动小车车体整体偏转,同时另一侧车架反向旋转,防止另一侧车轮悬空。当小车处于平地时,两侧车架不旋转,小车保持水平。
23.如图3所示,其中,6
‑
一层倒v形车架、7
‑
二层倒v形车架,双层级联倒v形车架,一层倒v形车架连接中轮和后轮,二层倒v形车架连接前轮和一层倒v形车架,车架可自由旋转,避免车轮悬空,贴合路面,更好适应崎岖地面。
24.如图4所示,其中8
‑
超声波传感器外壳、9
‑
超声波传感器支架、10
‑
太阳能电池板支架。车体前部安装舵机,舵机上安装超声波传感器,舵机带动超声波传感器从右到左旋转测量距离,通过算法连续避障。同时采用插槽式太阳能电池板支架,在保持太阳能电池板稳固的前提下,方便拆装。
25.如图5所示,其中,11
‑
转向舵机、12
‑
车轮驱动舵机、13
‑
车轮。每个车轮轮毂位置安装180度旋转舵机,每个车轮轮毂通过180度舵机与倒v形车架连接,实现六个轮子独立转向和旋转。
26.本款小车使用基于差速器原理的中央支撑系统,实现小车在平地上时车身保持水平,小车一侧地面不平时另一侧车架随之扭转,防止另一侧车轮悬空。双层级联倒v形车架形成悬挂系统,实现三个轮子更好贴合地面,防止车轮悬空。每个车轮轮毂位置安装180度旋转舵机,提供强力可控动力。每个车轮轮毂通过舵机与倒v形车架连接,实现车轮180度转向。基于arduino单片机的智能算法,实现连续测距、避障。插槽式太阳能电池板支架,在保持太阳能电池板稳固的前提下,方便拆装。
27.作为优选,车身和一层倒v形车架、二层倒v形车架的材质为pla(聚乳酸)。超声波传感器的型号为hc
‑
sr04。车轮的直径为6
‑
8cm。车轮表面设有凸起的纹路。
技术特征:
1.一种基于arduino的智能小车,其特征在于,包括车身、控制模块、支撑模块、悬挂模块和驱动模块;所述车身前端安装有舵机,舵机上安装超声波传感器,车身两侧设有太阳能电池板支架;所述控制模块选用arduino单片机,所述支撑模块包括三个伞形齿轮、三个轴套、两个长支臂和一个短支臂;所述轴套固定在车身上,长支臂和短支臂分别穿过轴套,长支臂的一端连接伞形齿轮、另一端与悬挂模块连接,短支臂的一端与伞形齿轮连接;所述悬挂模块包括一层倒v形车架和二层倒v形车架,一层倒v形车架连接中轮和后轮,二层倒v形车架连接前轮、长支臂和一层倒v形车架,所述一层倒v形车架和二层倒v形车架与车轮连接处安装有转向舵机;所述驱动模块包括车轮和驱动舵机。2.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述太阳能电池板支架为插槽式支架。3.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述转向舵机为180度的转向舵机。4.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述一层倒v形车架和二层倒v形车架的材质为pla。5.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述arduino单片机连接有车载sd卡。6.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述arduino单片机安装在车身底板的后端。7.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述车身的材质为pla。8.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述超声波传感器的型号为hc
‑
sr04。9.根据权利要求1所述的基于arduino的智能小车,其特征在于,所述车轮的直径为6
‑
8cm。10.根据权利要求1或9所述的基于arduino的智能小车,其特征在于,所述车轮表面设有凸起的纹路。
技术总结
本发明公开了一种基于arduino的智能小车,包括车身、控制模块、支撑模块、悬挂模块和驱动模块;车身前端安装有舵机,舵机上安装超声波传感器,车身两侧设有太阳能电池板支架;所述支撑模块包括三个伞形齿轮、三个轴套、两个长支臂和一个短支臂;悬挂模块包括一层倒V形车架和二层倒V形车架,所述一层倒V形车架和二层倒V形车架与车轮连接处安装有转向舵机;所述驱动模块包括车轮和驱动舵机。本发明的小车采用灵活、实用、低成本的悬挂系统,使得小车能适应复杂的地形,每一个轮子都单独通过舵机控制车轮转向,可以实现多种转向方式。每一个轮子都单独通过类似伺服电机的舵机驱动,可以保证转速一致,本款小车可通过算法实现不停车连续避障。连续避障。连续避障。
技术研发人员:刘海燕
受保护的技术使用者:淮阴工学院
技术研发日:2021.06.22
技术公布日:2021/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

