1.本发明属于航天器控制技术领域,尤其涉及一种基于能力模型的航天器任务推演方法和系统。
背景技术:
2.传统航天器面向确定任务设计,面对复杂、动态、不确定环境的场景难以做出自主应变。未来航天器将面向动态不确定场景设计,控制系统由传统姿态轨道指令驱动转变为任务能力驱动。传统控制系统转变为包含场景、感知、决策、控制的广义控制系统。
3.面对任务级要求的控制需求,传统的指令控制方式已经逐渐无法满足。航天器能力模型是可直接衡量的、可反向设计的建模方法,能够对航天器的任务完成性能进行属性表征,亟需开展基于能力模型的航天器任务推演方法,以增强对动态不确定场景的自主应变能力。
技术实现要素:
4.本发明的技术解决问题:面向航天器面向不确定场景下的感知 (observation)
‑
演化(evolution)
‑
决策(decision)
‑
执行(action)闭环过程 (简称oeda),针对演化环节中的任务推演需求,克服现有技术的不足,提供一种基于能力模型的航天器任务推演方法,解决了航天器实现对自身能力的快速评估、任务级指令的快速响应以及能力资源的快速分配问题,增强了对动态不确定场景的自主应变能力。
5.为了解决上述技术问题,本发明公开了一种基于能力模型的航天器任务推演方法,包括:
6.步骤1,根据获取的空间环境信息,进行态势评估,得到态势判定结果和态势判定结果对应的基本能力指标集合;
7.步骤2,将态势判定结果作为初始态势,以n个1级期望态势为目标,规划得到各1级期望态势对应的1级任务序列;
8.步骤3,将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合,针对每一个1级任务序列进行基于能力模型的多目标优化求解,得到各 1级期望态势对应的1级基本能力指标集合;
9.步骤4,将各1级期望态势作为初始态势,各1级基本能力指标集合作为初始基本能力指标集合,以m个2级期望态势为目标,重复步骤2和步骤3,得到各2级期望态势对应的2级基本能力指标集合;依次类推,得到各k级期望态势对应的k级基本能力指标集合;
10.步骤5,选择最优态势发展支链,并根据得到的态势判定结果对应的基本能力指标集合和各1~k级期望态势对应的1~k级基本能力指标集合,得到基于能力模型的任务推演结果。
11.在上述基于能力模型的航天器任务推演方法中,根据获取的空间环境信息,进行态势评估,得到态势判定结果和态势判定结果对应的基本能力指标集合,包括:
12.对获取的空间环境信息进行融合处理,得到空间态势状态集;
13.对空间态势状态集进行场景认知判断,得到态势判定结果;
14.根据得到的态势判定结果进行能力评估,得到态势判定结果对应的基本能力指标集合。
15.在上述基于能力模型的航天器任务推演方法中于,对获取的空间环境信息进行融合处理,得到空间态势状态集,包括:
16.通过航天器感知系统的各敏感器测量得到多维度的空间环境信息;
17.对同类信息源的空间环境信息进行选择与合并,对不同类信息源的空间环境信息进行关联与融合,得到空间态势状态集;其中,空间态势状态集为所有态势感知状态的集合,记为φ1={态势感知状态1、态势感知状态2、
···
、态势感知状态n},各态势感知状态至少包括如下信息:变量名、描述、类型和数值。
18.在上述基于能力模型的航天器任务推演方法中,对空间态势状态集进行场景认知判断,得到态势判定结果,包括:
19.调用态势感知状态数据库;
20.将空间态势状态集与所述态势感知状态数据库进行特征分析和匹配计算,判断态势感知状态数据库中是否存在与空间态势状态集相匹配的态势信息;
21.若确定态势感知状态数据库中存在与空间态势状态集相匹配的态势信息,则根据态势感知状态数据库中已有的态势信息,生成态势判定结果;
22.若确定态势感知状态数据库中不存在与空间态势状态集相匹配的态势信息,则根据态势判定准则对空间态势状态集进行综合判断,得到态势判定结果;并将得到的态势判定结果更新至所述态势感知状态数据库中。
23.在上述基于能力模型的航天器任务推演方法中,态势判定结果用于指示空间态势状态集描述的所有项目集合,记为φ2={项目1、项目2、
···
、项目m}。
24.在上述基于能力模型的航天器任务推演方法中,态势判定准则为空间态势状态集的逻辑运算或数学运算结果。
25.在上述基于能力模型的航天器任务推演方法中,根据得到的态势判定结果进行能力评估,得到态势判定结果对应的基本能力指标集合,包括:
26.根据得到的态势判定结果,筛选得到面向当前场景的航天器基本能力指标,构建得到态势判定结果对应的基本能力指标集合;其中,态势判定结果对应的基本能力指标集合为态势判定结果下能够满足所有潜在任务需求的基本能力指标的最大集合,记为φ3={基本能力指标1、基本能力指标2、
···
、基本能力指标 p}。
27.在上述基于能力模型的航天器任务推演方法中,将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合,针对每一个1级任务序列进行基于能力模型的多目标优化求解,得到各1级期望态势对应的1级基本能力指标集合,包括:
28.将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合;
29.针对每一个1级任务序列面向任务对初始基本能力指标集合进行重组,生成对应的1级任务能力指标集合;
30.根据生成的1级任务能力指标集合,构建得到任务能力最优函数;
31.根据任务能力最优函数,以初始基本能力指标集合中的项为优化变量进行求解,
得到多个最优和次优的能力要素解;
32.根据得到的多个最优和次优的能力要素解,确定各1级期望态势对应的1 级基本能力指标集合。
33.在上述基于能力模型的航天器任务推演方法中,针对每一个1级任务序列面向任务对初始基本能力指标集合进行重组,生成对应的1级任务能力指标集合,包括:
34.根据航天器的具体任务序列,将初始基本能力指标集合中的项按照确定性指标和概率性指标进行划分,得到确定性基本能力指标和概率性基本能力指标;其中,确定性基本能力指标与任务需求能力的比较结果为1或0,1表示满足, 0表示不满足;概率性基本能力指标与任务需求能力的比较结果为0到1之间的数,表示除当前概率性基本能力指标外其余基本能力指标均满足任务需求能力的条件下子任务成功的概率;
35.根据得到的确定性基本能力指标和概率性基本能力指标,确定总任务完成率、任务成功率、总任务生存率和总任务消耗比;
36.根据确定的总任务完成率、任务成功率、总任务生存率和总任务消耗比,生成1级任务能力指标集合,记作φ4={总任务完成率、总任务成功率、总任务生存率、总任务消耗比}。
37.相应的,本发明还公开了一种基于能力模型的航天器任务推演系统,包括:
38.态势评估模块,用于根据获取的空间环境信息,进行态势评估,得到态势判定结果和态势判定结果对应的基本能力指标集合;
39.态势推演任务序列生成模块,用于将态势判定结果作为初始态势,以n个 1级期望态势为目标,规划得到各1级期望态势对应的1级任务序列;
40.多目标优化求解模块,用于将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合,针对每一个1级任务序列进行基于能力模型的多目标优化求解,得到各1级期望态势对应的1级基本能力指标集合;
41.推演态势和推演能力生成模块,用于将各1级期望态势作为初始态势,各1级基本能力指标集合作为初始基本能力指标集合,以m个2级期望态势为目标,重复态势推演任务序列生成模块和态势推演任务序列生成模块的执行,得到各2级期望态势对应的2级基本能力指标集合;依次类推,得到各k级期望态势对应的k级基本能力指标集合;
42.任务推演结果生成模块,用于选择最优态势发展支链,并根据得到的态势判定结果对应的基本能力指标集合和各1~k级期望态势对应的1~k级基本能力指标集合,得到基于能力模型的任务推演结果。
43.本发明具有以下优点:
44.传统的航天器控制器设计往往追求单一控制效果,比如响应时间、机动时间,跟踪精度等低维度指标,无法对装备整体执行任务能力进行有效的评估和控制,造成任务规划应对动态不确定环境适应性差。本发明提出的一种基于能力模型的航天器任务推演方案,将态势评估、基本能力指标、任务能力指标作为任务推演的重要依据,实现对系统对自身能力的快速评估、任务级指令的快速响应以及能力资源的快速分配,较好的完成应用任务和行动,可作为航天器面向动态场景的任务规划设计工具。
附图说明
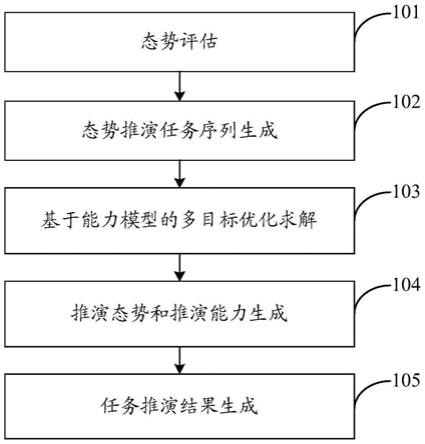
45.图1是本发明实施例中一种基于能力模型的航天器任务推演方法的步骤流程图;
46.图2是本发明实施例中一种推演态势和推演能力生成过程示意图;
47.图3是本发明实施例中一种基于能力模型的航天器任务推演系统的结构框图。
具体实施方式
48.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
49.未来航天器将在轨实现“感知
‑
演化
‑
决策
‑
执行”闭环过程,面向动态不确定场景设计,控制系统由传统姿态轨道指令驱动转变为任务能力驱动。面对任务级要求的控制需求,传统的指令控制方式已经逐渐无法满足。航天器能力模型是可直接衡量的、可反向设计的建模方法,能够对航天器的任务完成性能进行属性表征,亟需开展基于能力模型的航天器任务推演方法,以增强对动态不确定场景的自主应变能力。
50.基于上述思考,本发明公开了一种基于能力模型的航天器任务推演方法。
51.如图1,该基于能力模型的航天器任务推演方法,包括:
52.步骤101,态势评估:根据获取的空间环境信息,进行态势评估,得到态势判定结果和态势判定结果对应的基本能力指标集合。
53.在本实施例中,态势评估主要包括三个方面的处理:融合处理、场景认知判断和能力评估:
54.融合处理:
55.在本实施例中,融合处理是对获取的空间环境信息进行融合处理,得到空间态势状态集。具体的,可以通过航天器感知系统的各敏感器测量得到多维度的空间环境信息(如航天器所处环境、事件、时间、位置和能力模型等);然后,根据判决准则或主观意图,对同类信息源的空间环境信息进行选择与合并,对不同类信息源的空间环境信息进行关联与融合,进而得到空间态势状态集。
56.优选的,空间态势状态集为所有态势感知状态的集合,可以记为φ1={态势感知状态1、态势感知状态2、
···
、态势感知状态n},n表示态势感知状态的数量,可根据实际情况确定,本实施例对此不作限制。其中,各态势感知状态至少包括如下信息:变量名、描述、类型和数值。例如,一种空间态势状态集可表示为φ1={td、tae、tcv、dtcv、tcr、dtcr、
···
、wq}:
57.变量名描述类型数值td目标距离连续型100kmtae目标方位连续性[45
°
42
°
50
°
]tcv交会速度连续型10km/sdtcv交会速度增量连续型0.1km/stcr交会距离连续型10kmdtcr交会距离增量连续型0.1km
············
wq目标类型离散型{己方航天器、非合作航天器,碎片等}
[0058]
表1,空间态势状态集示意表
[0059]
场景认知判断:
[0060]
在本实施例中,场景认知判断是通过逻辑推断对当前场景的空间态势状态集进行认知判断,得到态势判定结果,此时得到的态势判定结果可以视为第0 级态势,可表示为态势0,如图2所示。具体的,可以调用态势感知状态数据库,将空间态势状态集与所述态势感知状态数据库进行特征分析和匹配计算,判断态势感知状态数据库中是否存在与空间态势状态集相匹配的态势信息。其中,若确定态势感知状态数据库中存在与空间态势状态集相匹配的态势信息,则根据态势感知状态数据库中已有的态势信息,生成态势判定结果。若确定态势感知状态数据库中不存在与空间态势状态集相匹配的态势信息,则根据态势判定准则对空间态势状态集进行综合判断,得到态势判定结果,并将得到的态势判定结果更新至所述态势感知状态数据库中。
[0061]
优选的,态势判定结果用于指示空间态势状态集描述的所有项目集合,记为φ2={项目1、项目2、
···
、项目m},m表示项目的数量,可根据实际情况确定,本实施例对此不作限制。
[0062]
优选的,态势判定准则为空间态势状态集的逻辑运算或数学运算结果。例如,逻辑运算:对于项目1,若态势感知状态1>预设值,则项目1=1;若态势感知状态1≤预设值,则项目1=0。数学运算结果:项目1=(态势感知状态1的数值)*(态势感知状态2的数值)。
[0063]
在一个具体实例中,一种态势判定结果可表示为φ2={威胁等级、目标意图、
···
、空间优势},态势判定准则可描述为:
[0064]
威胁等级:若wq为己方航天器,威胁等级值为0;若wq为非合作航天器,威胁等级值为0.5;若wq为碎片,威胁等级值为0.7。
[0065]
目标意图:若wq为己方航天器,目标意图值为0;若wq为非合作航天器,目标意图值为dtcv
÷
0.5 tcv
÷
20;若wq为碎片,目标意图值为0。
[0066]
空间优势:空间优势=(td
÷
100)
÷
(tcv
÷
20)
×
(tcr
÷
10)。
[0067]
能力评估:
[0068]
在本实施例中,能力评估是根据态势判定结果进行能力评估,筛选得到面向当前场景的航天器基本能力指标,即态势判定结果对应的基本能力指标集合。其中,态势判定结果对应的基本能力指标集合为态势判定结果下能够满足所有潜在任务需求的基本能力指标的最大集合,记为φ3={基本能力指标1、基本能力指标2、
···
、基本能力指标p},p表示基本能力指标的数量,可根据实际情况确定,本实施例对此不作限制。例如,一种态势判定结果对应的基本能力指标集合可表示为φ3={寿命、机动性、感知精度、
···
、感知范围}。
[0069]
如前所述,态势判定结果可以视为第0级态势,则其对应的基本能力指标集合可以视为第0级基本能力指标集合,可表示为基本能力0,如图2所示。
[0070]
步骤102,态势推演任务序列生成:将态势判定结果作为初始态势,以n 个1级期望态势为目标,规划得到各1级期望态势对应的1级任务序列。
[0071]
在本实施例中,如图2,n个1级期望态势可以表示为态势1、态势2、
··
、态势n,n表示1级期望态势的数量。进一步的,针对态势1、态势2、
···
、态势n可以分别规划相应的任务序列,如,针对态势1规划任务序列1,针对态势2规划任务序列2,
···
,针对态势n规划
任务序列n。其中,任务序列是包含多个子任务过程的序列,如,任务序列1为[任务1a,任务1b,
···
]。
[0072]
步骤103,基于能力模型的多目标优化求解:将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合,针对每一个1级任务序列进行基于能力模型的多目标优化求解,得到各1级期望态势对应的1级基本能力指标集合。
[0073]
在本实施例中,步骤103具体可以包括如下子步骤:
[0074]
子步骤1031,将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合。即,此时将基本能力0作为初始基本能力指标。
[0075]
子步骤1032,针对每一个1级任务序列面向任务对初始基本能力指标集合进行重组,生成对应的1级任务能力指标集合。
[0076]
在本实施例中,重组的具体实现过程可以如下:
[0077]
根据航天器的具体任务序列,将初始基本能力指标集合(φ3)中的项按照确定性指标和概率性指标进行划分,得到确定性基本能力指标和概率性基本能力指标。其中,确定性基本能力指标与任务需求能力的比较结果为1或0,1 表示满足,0表示不满足。概率性基本能力指标与任务需求能力的比较结果为0 到1之间的数,表示除当前概率性基本能力指标外其余基本能力指标均满足任务需求能力的条件下子任务成功的概率。进一步的,根据得到的确定性基本能力指标和概率性基本能力指标,确定总任务完成率、任务成功率、总任务生存率和总任务消耗比。最后,根据确定的总任务完成率、任务成功率、总任务生存率和总任务消耗比,生成1级任务能力指标集合,任务能力指标集合是航天器针对总任务的完成能力的表征,可记作φ4={总任务完成率、总任务成功率、总任务生存率、总任务消耗比}。其中,总任务完成率表示在规定时间内总任务完成进度与任务目标的比值,总任务成功率表示在规定时间内达到最大完成率的概率,总任务生存率表示在规定时间内任务成功或失败但生存的概率,总任务消耗比表示在规定时间内达到最大完成率的航天器能力折损。
[0078]
例如,对于某一态势感知子任务,确定性基本能力指标={寿命、态势感知、感知范围},概率性基本能力指标={可靠性、精度、稳定性、机动性、对地}。针对某一态势感知子任务,若所有确定性基本能力指标与该态势感知子任务需求能力的比较结果为1,则该态势感知子任务能完成,否则该态势感知子任务不能完成。对所有概率性基本能力指标设计概率函数有{1
×
可靠性,0.95
×
精度, 0.98
×
稳定性,0.90
×
机动性,1},比较结果为1的条件下,态势感知子任务成功概率为0.8379
×
可靠性
×
精度
×
稳定性
×
机动性。
[0079]
假设总任务数为16个,态势感知子任务完成比较结果为1的个数为15个,则:总任务完成率为0.9375;总任务成功率=(态势感知子任务1成功概率
×
态势感知子任务2成功概率
×
···
×
态势感知子任务16成功概率)
×
100%;总任务生存率=成功率 (1
‑
成功率)
×
存活概率
×
100%,存活概率由具体任务过程得出,默认为0.5;总任务消耗比=(任务前基本能力指标
‑
任务后基本能力指标)/任务前基本能力指标
×
100%。
[0080]
子步骤1033,根据生成的1级任务能力指标集合,构建得到任务能力最优函数。
[0081]
在本实施例中,如前所述,1级任务能力指标集合为:φ4={总任务完成率、总任务成功率、总任务生存率、总任务消耗比},则任务能力最优函数f可表示为f=总任务完成率
×
总任务成功率 总任务生存率
‑
总任务消耗比。
[0082]
子步骤1034,根据任务能力最优函数,以初始基本能力指标集合φ3中的项为优化
变量进行求解,得到多个最优和次优的能力要素解,确定各1级期望态势对应的1级基本能力指标集合。
[0083]
在本实施例中,该最优解问题为一个多约束、离散/连续混合非线性优化问题,可采用遍历寻优等方式进行求解,得到最优的任务能力指标,记为任务能力a
‑
b,进而得到任务执行过程航天器的基本能力指标的解,记为基本能力a
‑
b,其中,任务前能力指标记为基本能力a,任务后的能力指标记为基本能力b。例如,对于态势0到态势1的任务序列,任务能力0
‑
1={总任务完成率100%,总任务成功率95%,总任务生存率100%,总任务消耗比20%}。任务能力最优函数值f=2.75。任务前能力指标基本能力0={寿命0.9、机动性0.8、感知精度0.8、
···
、感知范围0.7},经过优化任务过程中的基本能力指标基本能力0
‑
1={寿命0.85、机动性0.9、感知精度0.9、
···
、感知范围0.9},任务后能力指标基本能力1={寿命0.87、机动性0.8、感知精度0.8、
···
、感知范围0.7}。
[0084]
步骤104,推演态势和推演能力生成:将各1级期望态势作为初始态势,各1级基本能力指标集合作为初始基本能力指标集合,以m个2级期望态势为目标,重复步骤102和步骤103,得到各2级期望态势对应的2级基本能力指标集合;依次类推,得到各k级期望态势对应的k级基本能力指标集合。
[0085]
在本实施例中,如图2所示,通过重复步骤102和步骤103的过程,可以得到下一级态势的子分支和下一级的基本能力指标。如,态势1的下一级态势包括态势11、态势12
···
、态势2的下一级态势包括态势21、态势22、
····
等;以及,态势11对应的基本能力指标11,态势12对应的基本能力指标12等。
[0086]
步骤105,任务推演结果生成:选择最优态势发展支链,并根据得到的态势判定结果对应的基本能力指标集合和各1~k级期望态势对应的1~k级基本能力指标集合,得到基于能力模型的任务推演结果。
[0087]
在本实施例中,可以根据态势推演结果、任务能力指标满足情况、剩余能力指标结果进行综合判断,从所有态势分支中选取最优态势发展支链,如对图 2中的三级态势进行评估,依据每次态势推演的任务能力指标和最终的基本能力指标,选定态势12为最优态势,即推演最优态势发展结果为态势0
‑
态势1
‑ꢀ
态势12。按照选定的最优态势发展结果生成最优任务序列,即任务1
‑
任务12,最终得到基于能力模型的任务推演结果,作为航天器应对态势的任务规划结果。例如,对图2中第三级态势进行比较,态势12和态势22为可选择的最优态势结果。进一步的,态势0
‑
态势1
‑
态势12的两次任务能力最优函数值分别为 f=2.75、2.6,态势0
‑
态势2
‑
态势22的两次任务能力最优函数值分别为f=2.73、 2.5,因此,从任务完成能力的角度选择态势0
‑
态势1
‑
态势12作为最终的推演最优态势发展结果。任务推演结果为任务1
‑
任务12。
[0088]
综上所述,本发明所述的基于能力模型的航天器任务推演方法,适用于航天器能力评估、学习训练、智能控制领域。航天器能力建模作为航天器面向动态场景的能力分析与评估工具,为航天器自主决策控制算法提供可控维数、准确高效的模型输入。基于能力模型的航天器任务推演,是能力模型应用的具体体现,主要包括态势评估、态势推演、能力模型求解和能力推演过程,得到当前时刻下最优或次优的若干能力要素解,对态势发展进行推演,得出航天器应对态势需求的最优系统配置和最优任务序列。
[0089]
在上述实施例的基础上,本发明还公开了一种基于能力模型的航天器任务推演系
统,如图3,该系统包括:态势评估模块301,用于根据获取的空间环境信息,进行态势评估,得到态势判定结果和态势判定结果对应的基本能力指标集合。态势推演任务序列生成模块302,用于将态势判定结果作为初始态势,以n个1级期望态势为目标,规划得到各1级期望态势对应的1级任务序列。多目标优化求解模块303,用于将态势判定结果对应的基本能力指标集合作为初始基本能力指标集合,针对每一个1级任务序列进行基于能力模型的多目标优化求解,得到各1级期望态势对应的1级基本能力指标集合。推演态势和推演能力生成模块304,用于将各1级期望态势作为初始态势,各1级基本能力指标集合作为初始基本能力指标集合,以m个2级期望态势为目标,重复态势推演任务序列生成模块302和态势推演任务序列生成模块303的执行,得到各 2级期望态势对应的2级基本能力指标集合;依次类推,得到各k级期望态势对应的k级基本能力指标集合。任务推演结果生成模块305,用于选择最优态势发展支链,并根据得到的态势判定结果对应的基本能力指标集合和各1~k级期望态势对应的1~k级基本能力指标集合,得到基于能力模型的任务推演结果。
[0090]
对于系统实施例而言,由于其与方法实施例相对应,所以描述的比较简单,相关之处参见方法实施例部分的说明即可。
[0091]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0092]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

