1.本实用新型涉及一种云台,特别是一种智能巡检机器人的云台。
背景技术:
2.城市轨道交通的发展给市民的出行带来了极大的便利,也正因为该原因,轨道交通网络的安全就显得尤其的重要,需要频繁地对轨道交通网络及机房进行检查,以确保轨道交通网络工作的安全性。
3.现行的轨道交通网络主要依靠人工进行巡检,人工巡检需要耗费大量的人力和财力,且人工巡检的效率和准确性均存在一定的不足之处。在此背景下,智能巡检机器人应运而生。
4.智能巡检机器人配备有视频采集装置和行走装置,可以逐渐取代巡检的工人,完成对网络以及机房设备的日常巡检。智能巡检机器人已出现了若干不同的产品,但功能均较为单一,主要起到现场采集图像数据的作用,且主要通过红外设备采集现场数据,质量不佳。
技术实现要素:
5.本实用新型的发明目的在于:针对上述存在的问题,提供一种智能巡检机器人的云台,以提供一种允许巡检机器人配置普通相机采集清晰图像的配件,并且允许巡检机器人对现场设备进行简单操作。
6.本实用新型采用的技术方案如下:
7.一种智能巡检机器人的云台,包括云台仓体,云台仓体通过第一转动机构连接底部的云台托架;云台仓体相对的两侧分别设置有相机仓体和补光灯仓体,相机仓体和补光灯仓体的朝向一致,云台仓体通过第二转动机构连接相机仓体和补光灯仓体;云台仓体后侧连接有操作杆仓体,操作杆仓体上朝远离云台仓体的方向设置有操作杆,操作杆仓体通过第三传动机构连接操作杆。
8.相机仓体和补光灯仓体允许安装普通相机和补光灯,以允许巡检机器人采集饱和、清晰的场景图像。同时,云台配备的操作杆在第三传动机构作用下具有运动功能,能够对现场设备的按钮等进行简单的点击操作。
9.进一步的,第一转动机构包括第一电机和第一转轴,第一电机设置于云台仓体中,第一电机传动连接第一转轴,第一转轴连接云台托架。
10.进一步的,第二转动机构包括第二电机和第二转轴,第二电机和第二转轴均设置于云台仓体中,第二电机传动连接第二转轴,第二转轴两端分别连接相机仓体和补光灯仓体。
11.进一步的,第三传动机构包括第三电机和第三转轴,第三电机和第三转轴均设置于操作杆仓体中,第三电机轴向驱动第三转轴,第三转轴连接操作杆。
12.进一步的,相机仓体中设置相机,补光灯仓体中设置补光灯,相机和补光灯朝向一
致。
13.进一步的,操作杆仓体上朝远离云台仓体的方向还设置有照明灯和摄像头,照明灯和摄像头朝向一致。
14.进一步的,照明灯设置于操作杆上方,摄像头设置于操作杆下方。
15.进一步的,照明灯包括至少两个灯体,各灯体均匀分布于操作杆上方。
16.进一步的,照明灯包括两个灯体,两个灯体位于操作杆上方两侧。两个灯体从两侧照明,可以防止操作杆在摄像头上呈现出阴影。
17.进一步的,摄像头设置于操作杆正下方。
18.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
19.1、本设计的云台允许配置普通相机采集饱和、情绪的场景图像,并且允许巡检机器人现场对设备进行点击操作。
20.2、本设计的云台具备旋转和翻转功能,能够监控和操作的范围非常广泛。
21.3、本设计的云台能够配置于绝大多数巡检机器人上,并且安装极其方便。
附图说明
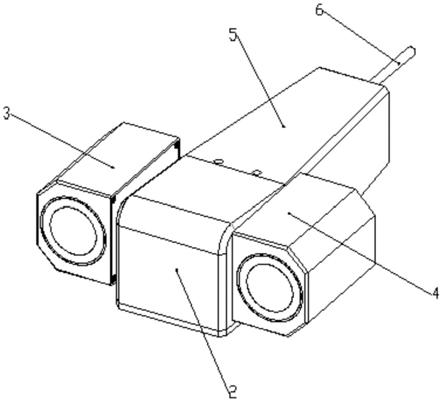
22.图1是云台右前方视图。
23.图2是云台右后方视图。
24.图3是云台正前方视图。
25.图4是云台正后方视图。
26.图中标记:1为云台托架,2为云台仓体,3为相机仓体,4为补光灯仓体,5为操作杆仓体,6为操作杆,7为照明灯,8为摄像头。
具体实施方式
27.下面结合附图,对本实用新型作详细的说明。
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.实施例一
30.一种智能巡检机器人的云台,如图1
‑
4所示,包括云台仓体2,该云台仓体2通过第一转动机构连接底部的云台托架1,云台仓体2可在第一转动机构的作用下绕该云台托架1进行360
°
的旋转。云台仓体2上分别设置有相机仓体3、补光灯仓体4和操作杆仓体5。相机仓体3和补光灯仓体4分别位于云台仓体2相对的两侧,且相机仓体3和补光灯仓体4的朝向(透光方向)一致。云台仓体2通过第二转动机构连接所述相机仓体3和补光灯仓体4,相机仓体3和补光灯仓体4可在第二转动机构的作用下分别绕云台仓体2进行俯仰转动。操作杆仓体5设置于云台仓体2的后侧,操作杆仓体5上朝远离云台仓体2的方向设置有操作杆6,操作杆仓体5通过第三传动机构连接该操作杆6,该操作杆6可在第三传动机构作用下相对于操作杆仓体5进行伸缩。
31.第一转动机构、第二转动机构、第三传动机构均连接于控制组件上,控制组件为控制电路部分的总称,包括mcu控制板、驱动器等,muc控制板控制驱动器驱动各电机。第一转
动机构包括第一电机,和由第一电机传动连接的第一转轴,第一电机设置于云台仓体2中,第一转轴连接云台托架1。第一电机和第一转轴之间可通过联轴器等公知的传动机构连接。第二转动机构包括第二电机,和由第二电机传动连接的第二转轴,第二电机和第二转轴均设置于云台仓体2中,第二转轴两端分别连接相机仓体3和补光灯仓体4。第二电机和第二转轴之间可通过伞齿轮或者蜗杆
‑
涡轮结构实现传动连接。第三传动机构包括第三电机,和由第三电机轴向驱动的第三转轴,第三转轴与操作杆6相连接(可固定连接,也可通过更多的传动组件进行连接)。第三电机和第三转轴间通过公知的周向转轴向运动的机构
‑
如丝杠
‑
连接。
32.相机仓体3中设置相机31,用于设备拍摄照片和实时设备视频信息,例如设置200万像素30倍光学变焦的相机。补光灯仓体4中设置补光灯41,例如设置led柔光补光灯。相机31和补光灯41的朝向一致。
33.操作杆仓体5上朝远离云台仓体2的方向还设置有照明灯7和摄像头8;照明灯7和摄像头8朝向一致。照明灯7用于为摄像头8采集的场景打光,摄像头8用于定位场景中具体的位置(如故障位置),操作杆6则通过伸缩来点击要操作的按钮。照明灯7设置于操作杆6的上方,摄像头8设置于操作杆6的下方。照明灯7在一些实施例中,为无影灯。在一个具体实施方式中,照明灯7包括至少两个灯体,各灯体均匀分布于操作杆6上方,摄像头8设置于操作杆6正下方。
34.实施例二
35.一种智能巡检机器人的云台,如图1
‑
4所示,包括云台仓体2,云台仓体2上分别设置有相机仓体3、补光灯仓体4和操作杆仓体5。相机仓体3和补光灯仓体4分别位于云台仓体2的两对两侧,且相机仓体3和补光灯仓体4的朝向(透光方向)一致,操作杆仓体5设置于云台仓体2的后侧,操作杆仓体5上朝远离云台仓体2的方向设置有操作杆6。
36.在云台仓体2中,设置有第一电机和第二电机,第一电机通过其传动连接的第一转轴连接设置于云台仓体2底部的云台托架1;第二电机传动连接第二转轴,第二转轴两端分别连接相机仓体3和补光灯仓体4,第二转轴位于云台仓体2内。操作杆仓体5中设置有第三电机和第三转轴,第三电机通过其轴向驱动的第三转轴连接所述操作杆6。
37.相机仓体3中设置相机31,补光灯仓体4中设置补光灯41,相机31和补光灯41的朝向一致,并在第二转轴的带动下同步俯仰运动。
38.操作杆仓体5上朝远离云台仓体2的方向还设置有照明灯7和摄像头8,照明灯7和摄像头8朝向一致。照明灯7包括两个灯体,两个灯体分别位于操作杆6上方两侧。摄像头8设置于操作杆6正下方。
39.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

