1.本实用新型涉及无人驾驶技术领域,特别是涉及一种无人驾驶教育研发车辆平台。
背景技术:
2.无人驾驶技术发展迅速,并已经开始应用于某些特定行业、领域。目前,对于无人驾驶技术的相关产品,在开发前期,需要对不同的无人驾驶技术方案进行筛选,并需要进行多轮的迭代优化,导致前期开发时间和经济成本居高不下,无人驾驶技术的产品开发、商业化落地进展,相对于技术的快速发展进展缓慢。
3.现有的无人驾驶技术的产品开发落地,主要有两种模式,一种是根据现有车型或设备进行无人驾驶的改造,加装相关的传感器、控制器;另一种是研发一款新的车型(或机器人)等设备,在新产品的开发过程中同步进行无人驾驶相关功能的研发。
4.上述第一种研发模式,需要对现有车型或设备进行改造,例如对底盘进行线性控制改造,车内加装控制器,车辆上方等加装激光雷达等控制器,但是,由于车辆外形等已经确定,传感器并不一定能够加装在需要的位置上,从而使得传感器的布置与无人驾驶总体方案不完全匹配,导致方案达不到最优的效果,或者导致方案需要多轮次反复迭代,造成研发周期和成本的增加。
5.上述第二种研发模式,需要在新的车型(或机器人)等设备产品的开发过程中,并行进行无人驾驶相关开发,若未提前对相关无人驾驶方案进行匹配验证,则产品的开发存在很大的风险,甚至可能导致整个产品方案推翻重来,极大地影响了产品的开发周期,造成不必要的经济损失。
技术实现要素:
6.本实用新型的目的是针对现有技术存在的技术缺陷,提供一种无人驾驶教育研发车辆平台。
7.为此,本实用新型提供了一种无人驾驶教育研发车辆平台,其包括底盘和上装设备;
8.底盘的顶部,安装有上装设备;
9.其中,底盘,包括底盘车架总成、前桥总成、后桥总成和电池总成;
10.前桥总成和后桥总成,分别安装在底盘车架总成的前部和后部;
11.电池总成,安装在底盘车架总成的中部下方;
12.其中,上装设备,包括计算模块、定位模块、感知模块、通信模块和交互模块;
13.其中,计算模块包括主控制器和车身控制器;
14.主控制器,分别与定位模块、感知模块、通信模块和交互模块相连接;
15.车身控制器,分别与前桥总成中的eps控制器和后桥总成中的电机驱动器相连接。
16.优选地,底盘车架总成,包括车架框架、电池舱封板、设备舱左右封板、设备舱前后
封板、设备舱上封板、设备舱检修盖、检修盖合页和检修盖把手;
17.其中,车架框架的中部左右两侧,分别安装有一个设备舱左右封板;
18.车架框架的前后两侧,分别安装有一个设备舱前后封板;车架框架的上部,安装有设备舱上封板;
19.设备舱上封板的前后两端,分别开有一个设备舱检修盖安装孔,并且每个设备舱检修盖安装孔的一侧通过检修盖合页铰接有设备舱检修盖。
20.优选地,每个设备舱检修盖上,安装有一个检修盖把手。
21.优选地,前桥总成,包括前桥托架、eps总成、eps控制器、两个前桥减震器和两个前轮总成;
22.其中,eps总成的本体,安装于前桥托架上;
23.eps控制器,安装于所述底盘车架总成中的车架框架前部的底板上;
24.eps控制器的数据线,通过车架框架前部的底板上预留的开孔与eps总成相连接;
25.每个前桥减震器一端与前桥托架顶部相连接,另一端与所述底盘车架总成中的车架框架;
26.两个前轮总成,分别可转动地安装在前桥托架的左右两端。
27.优选地,后桥总成,包括后桥托架、后桥电机总成、电机驱动器、两个轮速计、两个后桥减震器和两个后轮总成;
28.其中,后桥电机总成,安装于后桥托架顶部;
29.后桥电机总成的左右两端输出轴上,分别安装有一个轮速计;
30.后桥电机总成的左右两端输出轴的轴端,分别安装有一个后轮总成;
31.电机驱动器安装于所述底盘车架总成中的车架框架的底板上;
32.电机驱动器的数据线,通过车架框架的底板上预留的开孔,与后桥电机总成连接;
33.每个后桥减震器的一端与后桥托架顶部相连接,另一端与车架框架相连接。
34.优选地,电池总成包括电池、充电机、直流电压转换器和保险盒;
35.其中,电池,安装在车架框架的中部下方;
36.电池的左右两侧,分别安装有一个电池舱封板,以形成电池舱;
37.充电机、直流电压转换器和保险盒,安装于车架框架内部的仪器舱底板上;
38.其中,充电机上的充电导线,通过所述仪器舱底板上预留的开孔,与电池相连接。
39.优选地,计算模块中的主控制器和车身控制器,均安装于车架框架内部的仪器舱底板上;
40.通信模块,安装于车架框架内部的仪器舱底板上。
41.优选地,定位模块,包括组合导航模块、两个gnss天线和两个天线支架;
42.定位模块中组合导航模块,车架框架内部的仪器舱底板上;
43.组合导航模块,分别与主控制器、gnss天线和后桥总成中的轮速计相连接;
44.底盘车架总成中的设备舱上封板顶部的前后两端,分别安装有一个天线支架;
45.每个天线支架上,安装有一个gnss天线。
46.优选地,感知模块,包括激光雷达、激光雷达支架、激光雷达支架底座、超声波雷达、超声波雷达支架、摄像头和摄像头支架;
47.其中,底盘车架总成中的设备舱上封板顶部,安装有中空的激光雷达支架底座;
48.该激光雷达支架底座中,插接有一个激光雷达支架;
49.激光雷达支架的顶部,安装有激光雷达;
50.其中,底盘车架总成中的两个设备舱前后封板上,分别安装有多个超声波雷达支架;
51.每个超声波雷达支架上,分别安装有一个超声波雷达;
52.其中,底盘车架总成中的设备舱上封板顶部前端,垂直安装有一个摄像头支架;
53.摄像头支架顶部左右两端,分别安装有一个摄像头。
54.优选地,交互模块,包括控制面板、显示屏、开关按钮、急停开关、调试接口、电脑托架、触碰开关和蜂鸣器;
55.其中,底盘车架总成中的设备舱上封板顶部后端,安装有控制面板;
56.控制面板上安装有显示屏、开关按钮、急停开关和调试接口;
57.其中,电脑托架安装于设备舱上封板的中部;
58.底盘车架总成中的车架框架的前后两端外部,分别安装有一个触碰开关;
59.蜂鸣器安装于车架框架内部的仪器舱底板上方。
60.由以上本实用新型提供的技术方案可见,与现有技术相比较,本实用新型提供了一种无人驾驶教育研发车辆平台,其设计科学,通过预先集成了无人驾驶所需的线控底盘、控制器、传感器等设备,实现预先集成无人驾驶相关的部分功能,可以根据不同的研发需求进行快速、低成本的改造,较快地对产品所需的无人驾驶方案进行迭代验证,可缩短前期研发周期,降低开发成本,具有重大的实践意义。
附图说明
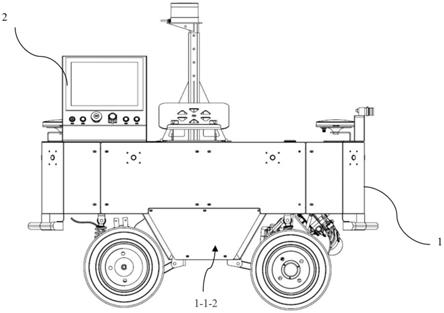
61.图1为本实用新型提供的一种无人驾驶教育研发车辆平台的整体结构示意图;
62.图2为本实用新型提供的一种无人驾驶教育研发车辆平台中,底盘的立体结构示意图;
63.图3为本实用新型提供的一种无人驾驶教育研发车辆平台中,底盘中的前桥总成的立体结构示意图;
64.图4为本实用新型提供的一种无人驾驶教育研发车辆平台中,底盘中的后桥总成的立体结构示意图;
65.图5为本实用新型提供的一种无人驾驶教育研发车辆平台中,在具有上装设备时的立体结构示意图;
66.图中,底盘:1,底盘车架总成:1
‑
1,前桥总成:1
‑
2,后桥总成:1
‑
3,电池总成:1
‑
4;
67.底盘车架总成:1
‑
1,车架框架:1
‑1‑
1,电池舱封板:1
‑1‑
2,设备舱左右封板:1
‑1‑
3,设备舱前后封板:1
‑1‑
4,设备舱上封板:1
‑1‑
5,设备舱检修盖:1
‑1‑
6,检修盖合页:1
‑1‑
7,检修盖把手:1
‑1‑
8;
68.前桥总成:1
‑
2,前桥托架:1
‑2‑
1,eps总成:1
‑2‑
2,eps控制器:1
‑2‑
3,前桥减震器:1
‑2‑
4,前轮总成:1
‑2‑
5;
69.后桥总成:1
‑
3,后桥托架:1
‑3‑
1,后桥电机总成:1
‑3‑
2,电机驱动器:1
‑3‑
3,轮速计:1
‑3‑
4,后桥减震器:1
‑3‑
5,后轮总成:1
‑3‑
6;
70.电池总成:1
‑
4,电池:1
‑4‑
1,充电机:1
‑4‑
2,直流电压转换器(dc
‑
dc):1
‑4‑
3,保险
盒:1
‑4‑
4;
71.上装设备:2,计算模块:2
‑
1,定位模块:2
‑
2,感知模块:2
‑
3,通信模块:2
‑
4,交互模块:2
‑
5;
72.计算模块:2
‑
1,主控制器:2
‑1‑
1,车身控制器:2
‑1‑
2;
73.定位模块2
‑
2,组合导航模块:2
‑2‑
1,gnss天线:2
‑2‑
2,天线支架:2
‑2‑
3;
74.感知模块:2
‑
3,激光雷达:2
‑3‑
1,激光雷达支架:2
‑3‑
2,激光雷达支架底座:2
‑3‑
3,超声波雷达:2
‑3‑
4,超声波雷达支架:2
‑3‑
5,摄像头:2
‑3‑
6,摄像头支架:2
‑3‑
7;
75.交互模块:2
‑
5,控制面板:2
‑5‑
1,显示屏:2
‑5‑
2,开关按钮:2
‑5‑
3,急停开关:2
‑5‑
4,调试接口:2
‑5‑
5,电脑托架:2
‑5‑
6,触碰开关:2
‑5‑
7,蜂鸣器:2
‑5‑
8。
具体实施方式
76.为使本实用新型实现的技术手段更容易理解,下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关申请,而非对该申请的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分。
77.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
78.需要说明的是,在本技术的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
79.此外,还需要说明的是,在本技术的描述中,除非另有明确的规定和限定,术语“安装”等应做广义理解,例如,可以是固定安装,也可以是可拆卸安装。
80.对于本领域技术人员而言,可根据具体情况理解上述术语在本技术中的具体含义。
81.参见图1至图5,本实用新型提供了一种无人驾驶教育研发车辆平台,包括底盘1和上装设备2;
82.底盘1的顶部,安装有上装设备2;
83.其中,底盘1,包括底盘车架总成1
‑
1、前桥总成1
‑
2、后桥总成1
‑
3和电池总成1
‑
4;
84.前桥总成1
‑
2和后桥总成1
‑
3,分别安装在底盘车架总成1
‑
1的前部和后部;
85.电池总成1
‑
4,安装在底盘车架总成1
‑
1的中部下方;
86.其中,上装设备2,包括计算模块2
‑
1、定位模块2
‑
2、感知模块2
‑
3、通信模块2
‑
4和交互模块2
‑
5;
87.其中,计算模块2
‑
1包括主控制器2
‑1‑
1和车身控制器2
‑1‑
2;
88.主控制器2
‑1‑
1,分别与定位模块2
‑
2、感知模块2
‑
3、通信模块2
‑
4和交互模块2
‑
5相连接(例如通过数据线);
89.车身控制器2
‑1‑
2,分别与前桥总成1
‑
2中的eps(电动助力转向系统)控制器1
‑2‑
3和后桥总成1
‑
3中的电机驱动器1
‑3‑
3相连接(例如通过数据线)。
90.在本实用新型中,具体实现上,参见图2所示,底盘车架总成1
‑
1,包括车架框架1
‑
1
‑
1、电池舱封板1
‑1‑
2、设备舱左右封板1
‑1‑
3、设备舱前后封板1
‑1‑
4、设备舱上封板1
‑1‑
5、设备舱检修盖1
‑1‑
6、检修盖合页1
‑1‑
7和检修盖把手1
‑1‑
8;
91.其中,车架框架1
‑1‑
1的中部左右两侧,分别安装有一个设备舱左右封板1
‑1‑
3;在图2中,只画出左侧的设备舱左右封板1
‑1‑
3;
92.车架框架1
‑1‑
1的前后两侧,分别安装有一个设备舱前后封板1
‑1‑
4;
93.在图2中,只画出前侧的设备舱前后封板1
‑1‑
4;
94.车架框架1
‑1‑
1的上部,安装有设备舱上封板1
‑1‑
5;
95.设备舱上封板1
‑1‑
5的前后两端,分别开有一个设备舱检修盖安装孔,并且每个设备舱检修盖安装孔的一侧通过检修盖合页1
‑1‑
7铰接有设备舱检修盖1
‑1‑
6。
96.具体实现上,每个设备舱检修盖1
‑1‑
6上,安装有一个检修盖把手1
‑1‑
8。
97.需要说明的是,设备舱左右封板1
‑1‑
3、设备舱前后封板1
‑1‑
4、设备舱上封板1
‑1‑
5和设备舱检修盖1
‑1‑
6一起,形成设备舱。
98.还需要说明的是,设备舱检修盖1
‑1‑
6一端通过两个检修盖合页1
‑1‑
7与设备舱上封板1
‑1‑
5连接,另一端装有检修盖把手1
‑1‑
8,可以通过扣动检修盖把手1
‑1‑
8,打开设备舱检修盖1
‑1‑
6,方便对设备舱内的设备进行调试检修。
99.在本实用新型中,具体实现上,参见图3所示,前桥总成1
‑
2,包括前桥托架1
‑2‑
1、eps总成1
‑2‑
2、eps控制器1
‑2‑
3、两个前桥减震器1
‑2‑
4和两个前轮总成1
‑2‑
5;
100.其中,eps总成1
‑2‑
2的本体,安装于前桥托架1
‑2‑
1上;
101.方向机(即车辆转向器)输出端,连接前轮总成1
‑2‑
5,从而带动前轮转向;
102.eps控制器1
‑2‑
3,安装于所述底盘车架总成1
‑
1中的车架框架1
‑1‑
1前部的底板上;
103.eps控制器1
‑2‑
3的数据线,通过车架框架1
‑1‑
1前部的底板上预留的开孔与eps总成1
‑2‑
2相连接,用于控制转向;
104.每个前桥减震器1
‑2‑
4一端与前桥托架1
‑2‑
1顶部相连接,另一端与所述底盘车架总成1
‑
1中的车架框架1
‑1‑
1(具体为底板)相连接,起到支撑减振的作用;
105.两个前轮总成1
‑2‑
5,分别可转动地安装在前桥托架1
‑2‑
1的左右两端。
106.需要说明的是,对于本实用新型,前桥总成1
‑
2通过前桥托架1
‑2‑
1和前桥减震器1
‑2‑
4,安装在底盘车架总成1
‑
1的车架框架1
‑1‑
1的前部。
107.需要说明的是,对于本实用新型,前桥总成1
‑
2,包括前桥托架1
‑2‑
1、eps总成1
‑2‑
2、eps控制器1
‑2‑
3、两个前桥减震器1
‑2‑
4和两个前轮总成1
‑2‑
5为现有技术成熟的功能模块,为现有的设备,在此不再赘述。
108.在本实用新型中,具体实现上,参见图4所示,后桥总成1
‑
3,包括后桥托架1
‑3‑
1、后桥电机总成1
‑3‑
2、电机驱动器1
‑3‑
3、两个轮速计1
‑3‑
4、两个后桥减震器1
‑3‑
5和两个后轮总成1
‑3‑
6;
109.其中,后桥电机总成1
‑3‑
2,安装于后桥托架1
‑3‑
1顶部;
110.后桥电机总成1
‑3‑
2的左右两端输出轴上,分别安装有一个轮速计1
‑3‑
4;
111.后桥电机总成1
‑3‑
2的左右两端输出轴的轴端,分别安装有一个后轮总成1
‑3‑
6;
112.电机驱动器1
‑3‑
3安装于所述底盘车架总成1
‑
1中的车架框架1
‑1‑
1的底板上;
113.电机驱动器1
‑3‑
3的数据线,通过车架框架1
‑1‑
1的底板上预留的开孔,与后桥电
机总成1
‑3‑
2连接,用于驱动电机运行,控制车辆纵向运动。
114.每个后桥减震器1
‑3‑
5的一端与后桥托架1
‑3‑
1顶部相连接,另一端与车架框架1
‑1‑
1相连接,起到支撑减振的作用。
115.需要说明的是,对于本实用新型,后桥总成1
‑
3通过后桥托架1
‑3‑
1和后桥减震器1
‑2‑
5,安装在底盘车架总成1
‑
1的车架框架1
‑1‑
1的后部。
116.需要说明的是,对于本实用新型,后桥托架1
‑3‑
1、后桥电机总成1
‑3‑
2、电机驱动器1
‑3‑
3、两个轮速计1
‑3‑
4、两个后桥减震器1
‑3‑
5和两个后轮总成1
‑3‑
6为现有技术成熟的功能模块,为现有的设备,在此不再赘述。
117.在本实用新型中,具体实现上,参见图2所示,电池总成1
‑
4包括电池1
‑4‑
1、充电机1
‑4‑
2、直流电压转换器(dc
‑
dc)1
‑4‑
3和保险盒1
‑4‑
4。
118.其中,电池1
‑4‑
1,安装在车架框架1
‑1‑
1的中部下方;
119.电池1
‑4‑
1的左右两侧,分别安装有一个电池舱封板1
‑1‑
2,以形成电池舱;
120.充电机1
‑4‑
2、直流电压转换器(dc
‑
dc)1
‑4‑
和保险盒1
‑4‑
4,安装于车架框架1
‑1‑
1内部的仪器舱底板1
‑1‑1‑
0上,从而打开设备舱检修盖1
‑1‑
6即可检修;
121.其中,充电机1
‑4‑
2上的充电导线,通过所述仪器舱底板1
‑1‑1‑
0上预留的开孔,与电池1
‑4‑
1相连接。
122.需要说明的是,充电机1
‑4‑
2,具体通过直流电压转换器(dcdc)1
‑4‑
3和保险盒1
‑4‑
4(用于安装汽车保险丝的盒子),与电池1
‑4‑
1相连接。
123.需要说明的是,在充电时,打开设备舱检修盖1
‑1‑
6,插上充电线即可对电池1
‑4‑
1进行充电。
124.需要说明的是,对于本实用新型,充电机1
‑4‑
2、直流电压转换器(dcdc)1
‑4‑
3和保险盒1
‑4‑
4为现有技术成熟的功能模块,为现有的设备,相互连接的连接方式为现有公知连接方式,在此不再赘述。
125.在本实用新型中,具体实现上,对于计算模块2
‑
1,计算模块2
‑
1中的主控制器2
‑1‑
1和车身控制器2
‑1‑
2,均安装于车架框架1
‑1‑
1内部的仪器舱底板1
‑1‑1‑
0上(即车架框架1
‑1‑
1与各封板形成的设备舱内的底板上);
126.需要说明的是,主控制器2
‑1‑
1,分别与定位模块2
‑
2、感知模块2
‑
3通信模块2
‑
4和交互模块2
‑
5相连接(通过数据线),用于收集传感器相关信息并进行自动驾驶运算。
127.需要说明的是,车身控制器2
‑1‑
2,分别与前桥总成1
‑
2中的eps(电动助力转向系统)控制器1
‑2‑
3和后桥总成1
‑
3中的电机驱动器1
‑3‑
3相连接(例如通过数据线),用于通过接收主控制器2
‑1‑
1发来的控制信息,来控制整个底盘1的横向和纵向运行。
128.需要说明的是,对于本实用新型,主控制器2
‑1‑
1和车身控制器2
‑1‑
2为现有无人驾驶汽车上的控制模块,为现有的设备,在此不再赘述。
129.在本实用新型中,具体实现上,参见图5所示,定位模块2
‑
2,包括组合导航模块2
‑2‑
1、两个gnss天线2
‑2‑
2和两个天线支架2
‑2‑
3;
130.定位模块2
‑
2中组合导航模块2
‑2‑
1,车架框架1
‑1‑
1内部的仪器舱底板1
‑1‑1‑
0上(即车架框架1
‑1‑
1与各封板形成的设备舱内的底板上);
131.组合导航模块2
‑2‑
1,分别与主控制器2
‑1‑
1、gnss天线2
‑2‑
2和后桥总成1
‑
3中的轮速计1
‑3‑
4相连接(例如通过数据线),用于融合传感器的定位信息并输出给主控制器2
‑
1
‑
1;
132.底盘车架总成1
‑
1中的设备舱上封板1
‑1‑
5顶部的前后两端,分别安装有一个天线支架2
‑2‑
3;
133.每个天线支架2
‑2‑
3上,安装有一个gnss天线2
‑2‑
2。
134.需要说明的是,gnss天线2
‑2‑
2的位置可调,可以验证自动驾驶对天线位置的不同方案要求。
135.需要说明的是,对于本实用新型,组合导航模块2
‑2‑
1为现有无人驾驶汽车上的模块,为现有的设备,在此不再赘述。
136.在本实用新型中,具体实现上,参见图5所示,感知模块2
‑
3,包括激光雷达2
‑3‑
1、激光雷达支架2
‑3‑
2、激光雷达支架底座2
‑3‑
3、超声波雷达2
‑3‑
4、超声波雷达支架2
‑3‑
5、摄像头2
‑3‑
6和摄像头支架2
‑3‑
7;
137.其中,底盘车架总成1
‑
1中的设备舱上封板1
‑1‑
5顶部,安装有中空的激光雷达支架底座2
‑3‑
3;
138.该激光雷达支架底座2
‑3‑
3中,插接有一个激光雷达支架2
‑3‑
2;
139.激光雷达支架2
‑3‑
2的顶部,安装有激光雷达2
‑3‑
1。
140.具体实现上,需要说明的是,对于本实用新型,感知模块2
‑
3中的激光雷达2
‑3‑
1,安装于激光雷达支架2
‑3‑
2的顶部,激光雷达支架2
‑3‑
2插入激光雷达支架底座2
‑3‑
3的方管内,激光雷达支架2
‑3‑
2和激光雷达支架底座2
‑3‑
3上可开有间距相同的若干孔,通过螺丝,来固定不同对应的孔位,可以调节激光雷达2
‑3‑
1的高度,进而可以验证不同方案对激光雷达高度的要求。
141.其中,底盘车架总成1
‑
1中的两个设备舱前后封板1
‑1‑
4上,分别安装有多个超声波雷达支架2
‑3‑
5;
142.每个超声波雷达支架2
‑3‑
5上,分别安装有一个超声波雷达2
‑3‑
4。
143.具体实现上,需要说明的是,对于本实用新型,具体实现上,超声波雷达2
‑3‑
4共有12个,前后正向各2个,左前、右前、左后、右后45
°
各1个,分别通过超声波雷达支架2
‑3‑
5安装在设备舱前后封板1
‑1‑
4上,左右两侧各2个,分别通过超声波雷达支架2
‑3‑
5安装在设备舱左右封板1
‑1‑
3上。超声波雷达2
‑3‑
4的高度、间距等位置可调,数量也可以增减,可以对不同的自动驾驶方案进行验证。
144.其中,底盘车架总成1
‑
1中的设备舱上封板1
‑1‑
5顶部前端,垂直安装有一个摄像头支架2
‑3‑
7;
145.摄像头支架2
‑3‑
7顶部左右两端,分别安装有一个摄像头2
‑3‑
6。
146.具体实现上,需要说明的是,摄像头2
‑3‑
6共有2个,安装于摄像头支架2
‑3‑
7上,摄像头支架2
‑3‑
7安装于设备舱上封板1
‑1‑
5的前端。摄像头支架2
‑3‑
7上开有相同间距的若干孔,使得摄像头2
‑3‑
6的高度和间距可调,以便对验证不同自动驾驶方案。
147.在本实用新型中,具体实现上,参见图5所示,通信模块2
‑
4,安装于车架框架1
‑1‑
1内部的仪器舱底板1
‑1‑1‑
0上(即车架框架1
‑1‑
1与各封板形成的设备舱内的底板上),用于负责与外界的通信,打开设备舱检修盖1
‑1‑
6,即可以方便地进行检修。
148.需要说明的是,对于本实用新型,通信模块2
‑
4为现有无人驾驶汽车上的模块,为现有的设备,在此不再赘述。
149.在本实用新型中,具体实现上,参见图5所示,交互模块2
‑
5,包括控制面板2
‑5‑
1、显示屏2
‑5‑
2、开关按钮2
‑5‑
3、急停开关2
‑5‑
4、调试接口2
‑5‑
5、电脑托架2
‑5‑
6、触碰开关2
‑5‑
7和蜂鸣器2
‑5‑
8;
150.其中,底盘车架总成1
‑
1中的设备舱上封板1
‑1‑
5顶部后端,安装有控制面板2
‑5‑
1;
151.控制面板2
‑5‑
1上安装有显示屏2
‑5‑
2、开关按钮2
‑5‑
3、急停开关2
‑5‑
4和调试接口2
‑5‑
5,从而可以方便对车辆平台进行调试操作;
152.其中,电脑托架2
‑5‑
6安装于设备舱上封板1
‑1‑
5的中部,可以调节高度和角度,方便测试时放置笔记本电脑。
153.具体实现上,底盘车架总成1
‑
1中的车架框架1
‑1‑
1的前后两端外部,分别安装有一个触碰开关2
‑5‑
7,即共有两个触碰开关2
‑5‑
7。对于触碰开关2
‑5‑
7,当触碰障碍物时,会输出急停信号,从而触发使得车辆停车。
154.具体实现上,蜂鸣器2
‑5‑
8安装于车架框架1
‑1‑
1内部的仪器舱底板1
‑1‑1‑
0上方(即安装于车架框架1
‑1‑
1与封板形成的设备舱内),用于在车辆进行倒车等操作时,通过鸣笛提醒行人。
155.在本实用新型中,需要说明的是,本实用新型提供的无人驾驶教育研发车辆平台的前桥总成1
‑
2和后桥总成1
‑
3,具备无人驾驶所需要的车辆横向和纵向线控需求,在研发使用时,无需再对底盘进行改造。
156.其中,后桥总成1
‑
3中预先集成轮速计1
‑3‑
4,同样无需再进行相关改造。定位模块2
‑
2中的gnss天线2
‑2‑
2、感知模块2
‑
3中的激光雷达2
‑3‑
1、超声波雷达2
‑3‑
4和摄像头2
‑3‑
6的位置均可以方便的进行调整,其中,超声波雷达2
‑3‑
4和摄像头2
‑3‑
6的数量也可方便的进行增减,可以方便快速地验证不同的无人驾驶定位、传感方案。
157.基于以上技术方案可知,对于本实用新型提供的一种用于无人驾驶教育研发的车辆平台,预先集成了底盘的横纵向线控,其定位、传感器方案可以方便的进行调整,可以辅助无人驾驶相关技术的教育研发,帮助无人驾驶产品进行快速方案研发迭代,降低研发成本,缩短研发周期。
158.综上所述,与现有技术相比较,本实用新型提供的一种无人驾驶教育研发车辆平台,其设计科学,通过预先集成了无人驾驶所需的线控底盘、控制器、传感器等设备,实现预先集成无人驾驶相关的部分功能,可以根据不同的研发需求进行快速、低成本的改造,较快地对产品所需的无人驾驶方案进行迭代验证,可缩短前期研发周期,降低开发成本,具有重大的实践意义。
159.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

