1.本发明涉及创建用于对被驱动装置进行定位控制的控制指令的控制数据创建装置、控制数据创建方法及控制数据创建程序。
背景技术:
2.伺服电动机等驱动装置使如旋转台这样的被驱动装置进行周期性的动作。在使被驱动装置按照旋转轴即主轴的旋转动作而周期性地驱动的情况下,创建表示主轴旋转1周的旋转角度和被驱动装置的动作位置的对应关系的波形,按照波形由驱动装置对被驱动装置进行驱动。
3.专利文献1所记载的控制装置,作为凸轮的移动位置的数据而准备出凸轮基准数据和时间基准数据,该凸轮基准数据对移动位置进行指示而作为凸轮旋转量的函数,该时间基准数据对移动位置进行指示而作为经过时间的函数。该控制装置在一系列的加工程序中,将基于凸轮基准数据的工序和基于时间基准数据的工序组合而执行。
4.专利文献1:国际公开第2002/091089号
技术实现要素:
5.但是,在上述专利文献1的技术中,针对凸轮基准数据进行基于凸轮旋转量的数据编辑,针对时间基准数据进行基于经过时间的数据编辑,因此无法针对凸轮基准数据进行基于经过时间的数据编辑,无法针对时间基准数据进行基于凸轮旋转量的数据编辑。例如,在希望针对凸轮基准数据进行基于经过时间的数据编辑的情况下,需要在用户使用计算机等将凸轮基准数据变换为时间基准数据后,针对该时间基准数据进行基于经过时间的数据编辑,将数据编辑后的时间基准数据再次重新变换为凸轮基准数据。同样地,在希望针对时间基准数据进行基于凸轮旋转量的数据编辑的情况下,需要在用户使用计算机等将时间基准数据变换为凸轮基准数据后,针对该凸轮基准数据进行基于经过时间的数据编辑,将数据编辑后的凸轮基准数据再次重新变换为时间基准数据。如上所述,存在下述问题,即,在编辑用于对凸轮进行定位控制的控制指令时变得繁琐。
6.本发明就是鉴于上述情况而提出的,其目的在于,得到能够容易地编辑用于对被驱动装置进行定位控制的控制指令的控制数据创建装置、控制数据创建方法及控制数据创建程序。
7.为了解决上述的课题,达到目的,本发明是一种控制数据创建装置,其创建用于将由驱动装置驱动的被驱动装置定位控制于与旋转轴即主轴的周期性的动作相对应的位置的控制指令,该控制数据创建装置具有:输入部,其对旋转信息及时间信息的至少一者进行接收,该旋转信息指定出主轴的旋转1周中的特定的旋转角度或者特定的旋转位置和被驱动装置的位置之间的对应关系,该时间信息指定出主轴的旋转1周中的特定的经过时间和被驱动装置的位置之间的对应关系;运算部,其基于旋转信息或者时间信息,对控制指令进行计算;以及显示控制部,其使由运算部计算出的控制指令在显示装置进行显示。本发明的
控制数据创建装置如果在显示装置显示出旋转信息的情况下输入部接收到对时间信息进行显示的指示,则运算部将旋转信息变换为时间信息,并且显示控制部使变换后的时间信息在显示装置进行显示,如果在显示装置显示出时间信息的情况下输入部接收到对旋转信息进行显示的指示,则运算部将时间信息变换为旋转信息,并且显示控制部使变换后的旋转信息在显示装置进行显示。
8.发明的效果
9.本发明所涉及的控制数据创建装置具有下述效果,即,能够容易地编辑用于对被驱动装置进行定位控制的控制指令。
附图说明
10.图1是表示实施方式所涉及的控制数据创建装置的结构的图。
11.图2是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第1例的图。
12.图3是表示通过实施方式所涉及的控制数据创建装置进行的定位控制数据的创建处理顺序的流程图。
13.图4是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第2例的图。
14.图5是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第3例的图。
15.图6是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第4例的图。
16.图7是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第5例的图。
17.图8是表示将实施方式所涉及的控制数据创建装置实现的硬件结构的图。
具体实施方式
18.下面,基于附图对本发明的实施方式所涉及的控制数据创建装置、控制数据创建方法及控制数据创建程序详细地进行说明。此外,本发明不受本实施方式限定。
19.实施方式.
20.图1是表示实施方式所涉及的控制数据创建装置的结构的图。图2是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第1例的图。控制数据创建装置10是创建用于将被驱动装置24定位控制于与旋转轴即主轴的周期性的动作相对应的位置的控制指令即定位控制数据的计算机。控制数据创建装置10具有针对用户对定位控制数据的创建进行辅助的功能。控制数据创建装置10是由创建定位控制数据的工程设计工具实现的。
21.控制数据创建装置10对定位控制数据进行计算而作为指定出被驱动装置24的位置的控制指令。被驱动装置24的例子为台车、旋转台。定位控制数据应用于伴随主轴的旋转而与从属轴连接的被驱动装置24的位置变化的机械。因此,定位控制数据是与主轴的位置(旋转角度)对应的被驱动装置24的位置。
22.控制数据创建装置10基于针对主轴的每个旋转位置所设定的被驱动装置24的位
置,对主轴的旋转1周中的旋转角度和被驱动装置24的位置之间的对应关系即定位控制数据的波形进行计算。
23.在图2中,示出了对定位控制数据进行显示的画面的初始状态即画面101。在画面101中对定位控制数据的波形201、将用于创建定位控制数据的信息进行输入的输入栏31~33等进行显示。图2所示的画面101及后面记述的图4至图7所示的画面102~105是创建定位控制数据的工程设计工具的画面。
24.控制数据创建装置10具有输入部11、要素选择切换部12、运算部13、运算结果存储部14、显示控制部15和显示内容切换部16。
25.控制数据创建装置10连接于显示装置30及控制器21。显示装置30是对由控制数据创建装置10创建出的定位控制数据进行显示的装置。显示装置30的例子为液晶监视器。定位控制数据通过将横轴设为主轴的旋转角度、将纵轴设为旋转台等被驱动装置24的位置的波形201进行显示。
26.控制器21与伺服放大器25连接,伺服放大器25与主轴电动机26连接。控制器21将与主轴电动机26对应的位置指令即电动机位置指令输出至伺服放大器25。
27.伺服放大器25按照电动机位置指令对主轴电动机26进行控制。伺服放大器25将电动机位置指令和从主轴电动机26发送来的电动机位置的反馈值进行比较,对主轴电动机26的运转状态(主轴的转速、主轴的扭矩等)进行调整,以使得反馈值成为与电动机位置指令相对应的值。
28.主轴电动机26具有主轴电机及主轴。主轴电动机26的主轴电机使主轴电动机26的主轴旋转。因此,电动机位置指令是指定出主轴电动机26的主轴的旋转角度的信息。
29.另外,控制器21与伺服放大器22连接,伺服放大器22与电动机23连接,电动机23与如旋转台这样的被驱动装置24连接。司令装置即控制器21使用发送至伺服放大器25的电动机位置指令和由控制数据创建装置10创建出的定位控制数据而向伺服放大器22输出位置指令。定位控制数据是将主轴的动作状态和向被驱动装置24的位置指令相关联的数据。因此,由控制器21输出至伺服放大器22的位置指令是与主轴的动作状态,即,发送至伺服放大器25的电动机位置指令(主轴的旋转角度)相对应的指令。主轴的动作状态通过主轴的旋转1周中的旋转角度或者主轴的旋转1周中的经过时间进行表示。定位控制数据内的位置指令是指定出被驱动装置24的位置的指令。控制器21从定位控制数据中提取与发送至伺服放大器25的电动机位置指令相对应的位置指令而输出至伺服放大器22。
30.控制装置即伺服放大器22按照来自控制器21的位置指令对电动机23进行控制。伺服放大器22将位置指令和从电动机23发送来的电动机位置的反馈值进行比较,对电动机23的运转状态进行调整,以使得反馈值成为与位置指令相对应的值。电动机23对被驱动装置24进行驱动。被驱动装置24具有使车架或者车轮这样的“进行动作的部件”移动的驱动传递装置的功能。例如,在被驱动装置24为台车的情况下,电动机23对台车进行驱动,由此车架进行动作。
31.此外,伺服放大器25及主轴电动机26的动作也可以由控制器21虚拟地计算。在该情况下,不需要伺服放大器25及主轴电动机26的配置。另外,伺服放大器25及主轴电动机26也可以由除了控制器21以外的其他控制器进行控制。在该情况下,控制器21使用从主轴电动机26向伺服放大器25发送来的反馈值和由控制数据创建装置10创建出的定位控制数据,
向伺服放大器22输出位置指令。
32.输入部11接收由用户输入的信息,输入至运算部13。在由用户输入至输入部11的信息中,存在用于创建定位控制数据的信息即创建设定信息。在创建设定信息中包含旋转台等被驱动装置24的1循环时间。另外,在创建设定信息中包含将主轴的旋转1周中的旋转的信息和被驱动装置24的位置之间的对应关系指定出的旋转信息、或者将主轴的旋转1周中的特定的经过时间和被驱动装置24的位置之间的对应关系指定出的时间信息。即,在创建定位控制数据时,用户将旋转信息或者时间信息输入至输入部11。旋转信息可以通过主轴的旋转1周中的特定的旋转角度(度)由用户指定,也可以通过主轴的旋转1周中的特定的旋转位置(mm或者英寸)等由用户指定。主轴的旋转1周中的特定的旋转角度示出通过1循环动作行进的角度,主轴的旋转1周中的特定的旋转位置示出通过1循环动作行进的距离(长度)。在对旋转信息进行指定时,对旋转信息的单位(度、英寸等)和1循环长度(角度或者距离)进行指定。控制数据创建装置10在旋转信息为旋转角度的情况下,将定位控制数据的横轴设为旋转角度,在旋转信息为旋转位置的情况下,将表示定位控制数据的图形的横轴设为旋转位置。在本实施方式中,对旋转信息通过主轴的旋转1周中的特定的旋转角度进行指定的情况进行说明。时间信息是主轴的旋转1周中的特定的时间,由用户指定。主轴的旋转1周中的特定的时间示出通过1循环动作行进的时间。
33.输入部11分别针对每个区间从用户对旋转信息或者时间信息进行接收。将主轴的旋转1周量的旋转角度或者经过时间进行分割而成为区间。在使用旋转信息的情况下,主轴的旋转1周量的旋转角度按照来自用户的指示,被分割为多个角度范围(特定的旋转角度)。在该情况下,各角度范围与区间相对应。在使用时间信息的情况下,主轴的旋转1周量的经过时间按照来自用户的指示,被分割为多个时间范围(特定的经过时间)。在该情况下,各时间范围与区间相对应。
34.主轴的旋转1周量的旋转角度按照来自用户的指示进行分割,以使得旋转角度的第1区间为0度至90度,第2区间为90度至180度,第3区间为180度至270度,第4区间为270度至360度。
35.主轴的旋转1周量的经过时间按照来自用户的指示进行分割,以使得经过时间的第1区间为0秒至15秒,第2区间为15秒至30秒,第3区间为30秒至45秒,第4区间为45秒至60秒。在主轴的旋转角度为0度时,经过时间为0。
36.如上所述,主轴的旋转1周量的旋转角度或者经过时间按照来自用户的指示被分为多个区间。各区间的旋转角度或者经过时间的范围是通过由用户向输入部11输入表示区间的边界的特定的旋转角度、或者表示区间的边界的特定的经过时间而设定的。输入部11针对1个区间,对旋转信息及时间信息中的任一者进行接收。在对区间设定旋转角度的情况下,输入部11对区间的开始点的旋转角度和结束点的旋转角度进行接收。在对区间设定经过时间的情况下,输入部11对区间的开始点的经过时间和结束点的经过时间进行接收。
37.被驱动装置24的1循环时间为主轴旋转1周所需的时间。即,主轴旋转1周的期间的时间和被驱动装置24的1循环时间相同。被驱动装置24的1循环时间的例子为凸轮循环时间,其表示旋转台进行1循环的动作期间的时间。
38.在画面101进行显示的输入栏的例子为用于输入1循环时间的输入栏31、用于输入旋转信息或者时间信息的输入栏33、用于指定作为横轴的标尺显示是否进行时间序列显示
(是否使经过时间进行显示)的输入栏32。
39.如果向输入栏32输入了勾选标记,则在横轴对经过时间进行显示,如果从输入栏32将勾选标记去除,则从横轴将经过时间删除。在对经过时间进行显示的情况下,经过时间与主轴的旋转角度一起在横轴进行显示。
40.在输入栏33,针对每个区间而存在对“输入数据形式”进行指定的栏、输入“开始点”的栏、输入“结束点”的栏、输入“行程”的栏、输入“凸轮曲线”的种类的栏。
41.对“输入数据形式”进行指定的栏是通过主轴的旋转角度或者经过时间对主轴的状态进行指定的栏。在对主轴的旋转角度进行指定的情况下,在“输入数据形式”的部位处对“位置”进行指定,在对经过时间进行指定的情况下,如后面所述对“时间”进行指定。
42.在“输入数据形式”的部位处指定出“位置”的情况下,将主轴的开始点及结束点进行输入的输入栏对主轴的位置即旋转角度进行接收。例如,在区间no.为“no.1”的区间,作为主轴的开始点而输入“0”,作为结束点而输入“90”。“输入数据形式”为“位置”的情况下的开始点及结束点的单位为表示角度的“度”。因此,在“no.1”的区间,作为主轴的开始点而输入0度,作为结束点而输入90度。
43.在图2中,示出了在“no.1”的区间输入0度至90度,在“no.2”的区间输入90度至180度,在“no.3”的区间输入180度至270度,在“no.4”的区间输入270度至0度(360度)的情况。
44.输入“行程”的栏是对被驱动装置24的结束点的位置(y坐标)进行指定的栏。向输入“行程”的栏,输入被驱动装置24的移动位置相对于被驱动装置24的最大的移动位置的比率。被驱动装置24的最大的移动位置为 100%或者-100%,因此向输入“行程”的栏,输入-100至 100为止之间的任意的数值。此外,向输入“行程”的栏,也能够通过实际上动作的位置(mm或者英寸)等进行指定。向输入“行程”的栏,输入行程的单位(%、英寸等)和行程量。控制数据创建装置10按照输入的行程的单位及行程的量,对表示定位控制数据的图形的纵轴进行显示。
45.输入“凸轮曲线”的种类的栏是对定位控制数据的波形201的种类进行指定的栏。在输入“凸轮曲线”的种类的栏,作为“凸轮曲线”的种类而输入“等加速度”、“等速度”、“5次”、“变形梯形”等。“等加速度”为等加速度曲线,“等速度”为等速度曲线,“5次”为5次曲线,“变形梯形”为变形梯形曲线。
46.此外,也可以在输入栏31取代1循环时间而输入主轴的旋转速度。控制数据创建装置10可以根据1循环时间对主轴的旋转速度进行计算,也可以根据主轴的旋转速度对1循环时间进行计算。
47.在由用户向输入部11输入的信息中存在项目指定信息,该项目指定信息是在由显示装置30显示的显示画面内对输入数值等的项目进行指定的信息。项目指定信息是通过由鼠标对在显示画面内所显示的项目进行指定而输入的。
48.项目指定信息包含有是否应用在显示画面内所显示的项目的信息、及表示将显示画面内所显示的项目选择为数值的输入对象的信息。在显示画面内所显示的项目的例子为输入栏31~33等。
49.如果作为项目指定信息的输入处理而在输入栏32输入了勾选标记,则应用输入栏32的项目即时间序列显示。在显示画面内所显示的项目被选择为数值的输入对象的情况下,由用户执行数值的输入。例如,在作为项目指定信息而指定了输入栏33后,在输入栏33
输入旋转信息或者时间信息。另外,在作为项目指定信息而指定了输入栏31后,在输入栏31输入1循环时间。
50.输入部11如果接收到创建设定信息,则将创建设定信息发送至运算部13。另外,输入部11如果接收到项目指定信息,则将项目指定信息发送至运算部13。
51.要素选择切换部12接收种类切换指示,该种类切换指示是对由输入栏33接收的信息的种类进行切换的指示。种类切换指示通过鼠标等从用户输入。种类切换指示是对将由输入栏33接收的信息设为旋转信息还是设为时间信息进行了指定的指示。即,种类切换指示是对设定用于创建定位控制数据的信息的方法进行切换的指示。种类切换指示是从旋转信息向时间信息切换的指示或者从时间信息向旋转信息切换的指示的任意者。在种类切换指示为旋转信息的情况下,在“输入数据形式”的部位处由用户对“位置”进行指定,在种类切换指示为时间信息的情况下,在“输入数据形式”的部位处由用户对“时间”进行指定。
52.此外,旋转信息及时间信息所包含的被驱动装置24的位置在旋转信息和时间信息中是共通的。因此,种类切换指示也可以说是对将接收的信息是设为主轴的旋转角度、还是设为经过时间进行指定的指示。在下面的说明中,在对旋转信息进行说明时,有时省略旋转信息之中的被驱动装置24的位置的信息,将旋转信息作为主轴的旋转角度的信息而进行说明。另外,在对经过信息进行说明时,有时省略经过信息之中的被驱动装置24的位置的信息,将经过信息作为经过时间的信息而进行说明。
53.能够通过种类切换指示而进行区间的指定,能够针对每个区间对旋转信息或者时间信息进行指定。要素选择切换部12将指定出主轴的旋转角度的种类切换指示或者指定出经过时间的种类切换指示发送至运算部13。
54.运算部13如果接收到种类切换指示,则对接收的信息的种类进行切换。运算部13如果接收到指定出主轴的旋转角度的种类切换指示,则对主轴的旋转角度进行接收。另外,运算部13如果接收到指定出经过时间的种类切换指示,则对经过时间进行接收。如上所述,运算部13基于种类切换指示,将接收的信息设定为主轴的旋转角度或者经过时间。
55.运算部13在接收的信息的种类为主轴的旋转角度的情况下,如果在“开始点”或者“结束点”输入了设定值,则判断为该设定值是指定出主轴的旋转角度的信息,将设定值作为主轴的旋转角度进行接收。另外,运算部13在接收的信息的种类为经过时间的情况下,如果在“开始点”或者“结束点”输入了设定值,则判断为该设定值是指定出经过时间的信息,将设定值作为经过时间进行接收。
56.运算部13基于旋转信息或者时间信息,对定位控制数据的波形201进行计算。在由用户输入了包含有主轴的旋转角度的旋转信息的情况下,运算部13使用1循环时间及旋转信息,对定位控制数据的波形201进行计算。另外,在由用户输入了包含有经过时间的时间信息的情况下,运算部13使用1循环时间及时间信息,对定位控制数据的波形201进行计算。
57.具体地说,运算部13基于输入至“输入数据形式”、“开始点”、“结束点”、“行程”及“凸轮曲线”的信息和1循环时间,针对每个区间对定位控制数据的波形201进行计算。运算部13将横轴设定为主轴的旋转角度或者经过时间,将纵轴设定为旋转台等被驱动装置24的位置。运算部13将开始点的坐标设定为与前1个区间的结束点相同的坐标。运算部13针对“no.1”区间的开始点,例如设定(0,0)的坐标。此外,“no.1”区间的开始点也可以为(0,0)以外的坐标。
58.另外,运算部13基于行程对结束点的y坐标进行设定。运算部13通过旋转角度对开始点的y坐标进行设定,在“输入数据形式”为“时间”的情况下,通过经过时间对开始点的y坐标进行设定。另外,运算部13针对最终区间的结束点,例如设定(0,0)的坐标。此外,“no.1”区间的结束点也可以是(0,0)以外的坐标。
59.运算部13通过所指定出的凸轮曲线将针对每个区间的开始点至结束点为止连结。运算部13在“输入数据形式”为“位置”的情况下,基于1循环时间及凸轮曲线,对各区间内的波形进行计算。
60.运算部13如果在旋转角度或者经过时间被设定后接收到种类切换指示,则对旋转角度和经过时间进行切换。即,运算部13在显示出主轴的旋转角度的情况下,如果接收到种类切换指示,则将主轴的旋转角度变换为经过时间。另外,运算部13在显示出经过时间的情况下,如果接收到种类切换指示,则将经过时间变换为主轴的旋转角度。如上所述,运算部13具有在主轴的旋转角度和经过时间之间进行相互变换的功能。
61.例如,在1循环时间为60秒的情况下,主轴为了进行360度旋转而需要60秒。如果假定主轴以恒定的速度进行旋转,则每单位时间的主轴的旋转角度恒定。运算部13利用主轴的旋转角度和经过时间处于正比关系的情况,基于1循环时间而进行主轴的旋转角度和经过时间之间的相互变换。此外,在输入部11取代1循环时间而是从用户接受主轴的旋转速度的情况下,运算部13基于主轴的旋转速度对1循环时间进行计算,使用1循环时间进行主轴的旋转角度和经过时间之间的相互变换。
62.另外,运算部13如果针对由项目指定信息指定出的项目而接收到数值,则将接收到的数值设定于由项目指定信息所指定的项目。例如,运算部13如果在由项目指定信息指定出输入栏31的情况下接收到数值,则将接收到的数值设定为1循环时间。另外,运算部13在作为项目指定信息向输入栏32输入了勾选标记的情况下,将在对定位控制数据进行显示的图形的横轴使经过时间进行显示的指示发送至显示控制部15。在该情况下,运算部13将按照对定位控制数据进行显示的图形的横轴的刻度,使主轴的旋转1周中的旋转角度和经过时间以2段排列显示的指示发送至显示控制部15。
63.运算部13使从用户输入的创建设定信息、计算出的定位控制数据的波形201、变换后的主轴的旋转角度、变换后的经过时间、项目指定信息的内容及在项目指定信息中设定的数值存储于运算结果存储部14。
64.运算结果存储部14是对创建设定信息、定位控制数据的波形201、变换后的主轴的旋转角度、变换后的经过时间、项目指定信息的内容及在项目指定信息中设定的数值进行存储的存储器等。
65.显示内容切换部16接收对定位控制数据的显示内容进行切换的指示即显示切换指示。显示切换指示针对在显示装置30显示中的显示画面,由鼠标等从用户输入。显示切换指示是指定出是否使与定位控制数据相对应的速度、加速度、加加速度即跃度进行显示的指示。加加速度是对加速度进行微分得到的。显示内容切换部16将显示切换指示发送至显示控制部15。
66.显示控制部15使运算结果存储部14内的信息在显示装置30图形化地显示。显示控制部15使用用于对显示画面进行显示的数据而生成显示画面的数据,在该显示画面使运算结果存储部14内的信息进行显示。显示控制部15使定位控制数据的波形201在显示画面进
行显示,并且使在定位控制数据的波形201的计算时使用的主轴的旋转角度(由用户设定的主轴的旋转角度)在显示画面进行显示。另外,在主轴的旋转角度和经过时间被相互变换后的情况下,显示控制部15使变换后的主轴的旋转角度或者变换后的经过时间在显示画面进行显示。另外,显示控制部15使项目指定信息的内容及在项目指定信息中设定出的数值在显示画面进行显示。
67.另外,显示控制部15如果从运算部13接受到经过时间的显示指示,则在显示画面所显示出的图形的横轴对经过时间进行显示。另外,显示控制部15如果从显示内容切换部16接受到显示切换指示,则对定位控制数据的显示内容进行切换。显示控制部15对是否使定位控制数据、速度、加速度及加加速度分别显示进行切换。
68.如上所述,运算部13经由显示控制部15在显示画面对信息进行显示。此外,在下面的说明中,在对通过由运算部13向显示控制部15发送信息的显示指示,从而显示控制部15在显示画面对信息进行显示的处理进行说明时,有时省略显示控制部15的处理。即,有时将按照来自运算部13的指示由显示控制部15使显示画面对信息进行显示的处理,作为由运算部13使显示画面对信息进行显示的处理而进行说明。
69.图3是表示通过实施方式所涉及的控制数据创建装置进行的定位控制数据的创建处理顺序的流程图。控制数据创建装置10的输入部11对从用户输入的创建设定信息进行接收。具体地说,控制数据创建装置10的输入部11对从用户输入的1循环时间进行接收(步骤s10),对从用户输入的旋转信息或者时间信息进行接收(步骤s20)。
70.运算部13使用1循环时间,对定位控制数据的波形201进行计算显示(步骤s30)。在输入部11接收到旋转信息(主轴的旋转角度)的情况下,运算部13使用主轴的旋转角度和1循环时间,对定位控制数据的波形201进行计算。在输入部11接收到时间信息(经过时间)的情况下,运算部13使用经过时间和1循环时间,对定位控制数据的波形201进行计算。
71.运算部13对在创建定位控制数据时使用的信息的设定方法是否发生了变更进行判定。即,运算部13对在创建定位控制数据时使用的信息的设定方法是否从主轴的旋转角度变更为经过时间进行判定(步骤s40)。
72.在创建定位控制数据时使用的信息的设定方法从主轴的旋转角度变更为经过时间的情况下(步骤s40,yes),运算部13将主轴的旋转角度变换为经过时间(步骤s50)。变换后的经过时间储存于运算结果存储部14。显示控制部15从运算结果存储部14将变换后的经过时间读出而在显示装置30进行显示(步骤s60)。
73.在创建定位控制数据时使用的信息的设定方法没有从主轴的旋转角度变更为经过时间的情况下(步骤s40,no),运算部13对在创建定位控制数据时使用的信息的设定方法是否从经过时间变更为主轴的旋转角度进行判定(步骤s70)。
74.在创建定位控制数据时使用的信息的设定方法没有从经过时间变更为主轴的旋转角度的情况下(步骤s70,no),返回至步骤s40的处理。
75.在创建定位控制数据时使用的信息的设定方法从经过时间变更为主轴的旋转角度的情况下(步骤s70,yes),运算部13将经过时间变换为主轴的旋转角度(步骤s80)。变换后的主轴的旋转角度储存于运算结果存储部14。显示控制部15从运算结果存储部14将变换后的主轴的旋转角度读出,在显示装置30进行显示(步骤s90)。此外,运算部13也可以在步骤s40前执行步骤s70的处理。
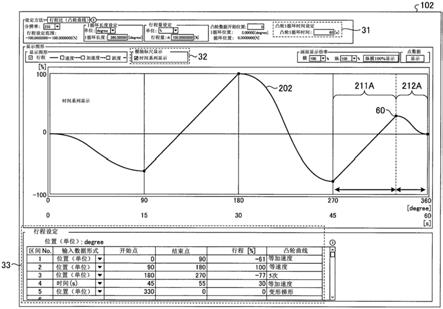
76.图4是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第2例的图。在图4中,示出了对定位控制数据进行显示的图形的任意区间被分割的情况下的画面102。在画面102中,通过波形202示出了定位控制数据的波形。
77.如果用户在输入栏32输入了勾选标记,则输入部11对由用户指定出输入栏32的项目指定信息进行接收,发送至运算部13。运算部13将在对定位控制数据进行显示的图形的横轴使经过时间进行显示的指示发送至显示控制部15。在图4中,运算部13将按照对定位控制数据进行显示的图形的横轴的刻度使主轴的旋转角度和经过时间以2段排列显示的指示发送至显示控制部15,示出了显示控制部按照横轴的刻度使主轴的旋转1周中的旋转角度和经过时间以2段排列显示的情况。在画面102中,在旋转角度为0度的部位,作为经过时间而显示出0秒,在旋转角度为360度的部位,作为经过时间而显示出60秒。另外,在画面102中,在旋转角度为90度的部位,作为经过时间而显示出15秒,在旋转角度为180度的部位,作为经过时间而显示出30秒,在旋转角度为270度的部位,作为经过时间而显示出45秒。
78.另外,在图2的画面101中,如果波形201的任意部位被点击,则运算部13将点击的部位设定为新的开始点。在图4中,作为波形202上的位置,示出了主轴的旋转角度为270度至360度为止的区间(“no.4”的区间)上的点60的位置被指定出的情况。在该情况下,运算部13以点60的位置为边界对主轴的旋转角度为270度至360度的区间进行分割。而且,运算部13将主轴的旋转角度为270度的位置至点60的位置为止设定为“no.4”的区间,将点60的位置至主轴的旋转角度为360度的位置为止设定为“no.5”的区间。即,运算部13将“no.4”的区间分割为新的“no.4”的区间和新的“no.5”的区间。此外,运算部13在对“no.1”的区间进行分割的情况下,分割为新的“no.1”的区间和新的“no.2”的区间,将原来的“no.2”及其以后的区间编号分别错后1个。
79.另外,运算部13将用于针对新的“no.4”的区间及新的“no.5”的区间而输入创建设定信息的输入栏设定于输入栏33内,使设定的输入栏在画面102进行显示。在点60的位置为330度的情况下,运算部13将新的“no.4”的区间的开始点设定为270度,将结束点设定为330度,使设定后的旋转角度在画面102进行显示。另外,运算部13将新的“no.5”的区间的开始点设定为330度,将结束点设定为0度,使设定后的旋转角度在画面102进行显示。
80.如果针对输入栏33的新的“no.4”的区间,由鼠标等对“输入数据形式”的栏进行了指定,则要素选择切换部12接收针对“输入数据形式”的种类切换指示。在“输入数据形式”的栏中设定有主轴的旋转角度的情况下,如果“输入数据形式”的栏由鼠标等指定为“经过时间”,则要素选择切换部12将指定出经过时间的种类切换指示发送至运算部13。
81.运算部13将“no.4”的区间的“输入数据形式”设定为经过时间,使设定后的输入栏33在画面102进行显示。此时,运算部13将“no.4”的区间的主轴的旋转角度变换为经过时间。“no.4”的区间的主轴的旋转角度设为是270度至330度。即,点60的位置的旋转角度设为是330度。在该情况下,运算部13将主轴的旋转角度即270度变换为与270度相对应的经过时间即45秒,将主轴的旋转角度即330度变换为与330度相对应的经过时间即55秒。运算部13将经过时间的45秒设定为“no.4”的区间的“开始点”,将经过时间的55秒设定为“no.4”的区间的“结束点”,使设定后的输入栏33在画面102进行显示。
82.用户对输入栏33输入新的经过时间,由此能够对经过时间的45秒及55秒进行变更。在“no.4”的区间的经过时间变更后的情况下,运算部13对变更后的经过时间进行登记,
使变更后的输入栏33在画面102进行显示。
83.在由用户对“no.4”的区间的“凸轮曲线”进行了变更的情况下,运算部13对“no.4”的区间的“凸轮曲线”的设定进行变更,使变更后的输入栏33在画面102进行显示。在画面102中,示出了“no.4”的区间的“凸轮曲线”从“变形梯形”变更为“等加速度”的情况。在“凸轮曲线”变更后的情况下,运算部13对波形202进行变更,以使得与变更后的“凸轮曲线”相对应。
84.在由用户输入了“no.4”的区间的“行程”的情况下,运算部13将输入的值设定为“行程”,使设定后的输入栏33在画面102进行显示。在画面102中,示出了在“no.4”的区间的“行程”设定有“30”的情况。在“行程”变更后的情况下,运算部13对波形202进行变更以使得与变更后的“行程”相对应。在画面102的图形中,将“no.4”的新的区间通过区间211a示出,将“no.5”的新的区间通过区间212a示出。
85.另外,能够针对通过图2的画面101显示出的输入栏33,由用户输入区间的分割指示。例如,如果针对输入栏33的“no.4”的区间输入了分割指示,则运算部13将输入栏33的“no.4”的区间分割为“no.4”的区间和“no.5”的区间。在该情况下,运算部13例如将270度至360度的“no.4”的区间分割为270度至未定角度(空栏)的新的“no.4”的区间和未定角度(空栏)至360度的新的“no.5”的区间。而且,如果由用户对“no.4”的区间的结束点的旋转角度进行了变更,则运算部13对“no.5”的区间进行变更,以使得“no.4”的区间的结束点的旋转角度和“no.5”的区间的开始点的旋转角度成为相同。
86.另外,在“no.4”的区间的“输入数据形式”变更为经过时间的情况下,如果由用户对“no.4”的区间的结束点的经过时间进行了变更,则运算部13对“no.5”的区间进行变更,以使得“no.5”的区间的开始点的旋转角度与“no.4”的区间的结束点的经过时间相对应。
87.图5是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第3例的图。在图5中,示出了使对定位控制数据进行显示的波形的任意点移动时的画面103。在画面103中,将所要显示的定位控制数据的波形通过波形203示出。
88.针对通过画面103显示出的波形203,用户能够通过鼠标等对波形203上的点进行指定。在图5中,示出了通过波形203的“no.4”的区间指定出波形203上的点70的位置的情况。在图5的例子中,波形203内的区间211a和区间212a的边界位置成为点70的位置。指定出的点70通过在画面103内被拖动而能够移动。
89.图6是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第4例的图。在图6中,示出了图5所示的波形203的点70的位置移动后的画面104。在画面104中,将所要显示的定位控制数据的波形通过波形204示出。
90.运算部13如果对被拖动的点70进行绘制,则将绘制出的位置变更为波形204上的点61。由此,运算部13将波形203内的区间211a变更为波形204内的区间211b,将波形203内的区间212a变更为波形204内的区间212b。即,将“no.4”的区间变更为区间211a至区间211b,将“no.5”的区间变更为区间212a至区间212b。点61的位置为区间211b和区间212b的边界。
91.在波形204中,点61的位置的经过时间设为是50秒。在该情况下,运算部13将输入栏33中的“no.4”的区间的开始点保持45秒不变,将结束点从55秒变更为50秒。另外,运算部13将输入栏33中的“no.5”的区间的开始点设定为与“no.4”的区间的结束点相同。“no.4”的
区间的结束点是经过时间为50秒,因此运算部13作为与经过时间的50秒相对应的旋转角度而将300度设定为“no.5”的区间的开始点。运算部13使设定后的输入栏33在画面104进行显示。
92.图7是表示实施方式所涉及的控制数据创建装置所显示的定位控制数据的第5例的图。在图7中,示出了将根据定位控制数据而计算出的速度等数据显示出的画面105。在图7中,将画面105所显示的定位控制数据的波形与图5同样地通过波形203示出。
93.如果显示内容切换部16接收到显示切换指示,则运算部13基于波形203对由显示切换指示指定出的数据进行计算。
94.在通过显示切换指示指定出速度的显示的情况下,运算部13通过对定位控制数据的波形203进行微分,从而对与定位控制数据相对应的速度数据的波形进行计算。在画面105中,将与定位控制数据相对应的速度数据的波形通过波形231示出。
95.在通过显示切换指示指定出加速度的显示的情况下,运算部13通过对速度数据的波形231进行微分,从而对与定位控制数据相对应的加速度数据的波形进行计算。在画面105中,将与定位控制数据相对应的加速度数据的波形通过波形232示出。此外,运算部13也可以通过对定位控制数据的波形203进行2次微分,从而对与定位控制数据相对应的加速度数据的波形进行计算。
96.在通过显示切换指示指定出加加速度的显示的情况下,运算部13通过对加速度数据的波形232进行微分,从而对与定位控制数据相对应的加加速度数据的波形进行计算。在画面105中,将与定位控制数据相对应的加加速度数据的波形通过波形233示出。此外,运算部13也可以通过对定位控制数据的波形203进行3次微分,从而对与定位控制数据相对应的加加速度数据的波形进行计算,通过对速度数据的波形231进行2次微分,从而对与定位控制数据相对应的加加速度数据的波形进行计算。
97.控制数据创建装置10能够使定位控制数据的波形203、速度数据的波形231、加速度数据的波形232及加加速度数据的波形233在1个绘制区域排列而显示。即,显示控制部15能够将定位控制数据的波形203、速度数据的波形231、加速度数据的波形232及加加速度数据的波形233设为复合图形而同时地显示。
98.在这里,对控制数据创建装置10的硬件结构进行说明。图8是表示将实施方式所涉及的控制数据创建装置实现的硬件结构的图。控制数据创建装置10由处理器301、存储器302、输入装置303及接口电路304实现。处理器301对存储器302、输入装置303及接口电路304进行控制。输入装置303的例子为鼠标、键盘。输入装置303对来自用户的指示进行接收而输入至处理器301。接口电路304将通过处理器301得到的数据处理的结果向显示装置30输出。
99.处理器301的例子为cpu(也称为central processing unit、中央处理装置、处理装置、运算装置、微处理器、微型计算机、处理器、dsp(digital signal processor))或者系统lsi(large scale integration)。存储器302的例子为ram(random access memory)或者rom(read only memory)。
100.输入部11、要素选择切换部12及显示内容切换部16是使用输入装置303而实现的。运算部13、运算结果存储部14及显示控制部15是使用处理器301及存储器302而实现的。运算结果存储部14和控制器21之间的通信是使用接口电路304而实现的。
101.控制数据创建装置10是处理器301通过将存储器302所存储的用于执行控制数据创建装置10的动作的程序读出并执行而实现的。另外,该程序也可以说使计算机执行控制数据创建装置10的顺序或者方法。存储器302还使用于处理器301执行各种处理时的暂时存储器。
102.处理器301执行的程序是具有计算机可读取且非易失性的(non
‑
transitory)记录介质的计算机程序产品,该记录介质包含能够由计算机执行的、用于进行数据处理的多个命令。处理器301执行的程序使计算机针对多个命令而执行数据处理。
103.另外,可以将控制数据创建装置10通过专用的硬件实现。另外,关于控制数据创建装置10的功能,可以将一部分通过专用的硬件实现,将一部分通过软件或者固件实现。
104.另外,在没有将主轴的旋转角度和经过时间进行相互变换的功能的情况下,用户为了从基于旋转角度而创建出的定位控制数据取得动作中途的经过时间,需要使用定位控制数据而手动地对经过时间进行计算。
105.另外,在创建与主轴的旋转角度对应的机械凸轮模式(旋转台等的动作模式)时,创建将横轴设为主轴的旋转角度、将纵轴设为机械凸轮的动作位置的图形,但由于横轴为主轴的单位系统,因此难以根据主轴的特定的旋转角度而对经过了某一定时间后的机械凸轮的动作位置进行设定。
106.另外,在没有将主轴的旋转角度和经过时间进行相互变换的功能的情况下,在创建整个区间的定位控制数据后,无法进行再编辑以使得针对每个区间对主轴的旋转角度和动作经过时间进行变更。因此,无法针对每个区间对主轴的旋转角度和动作经过时间进行选择而使设定内容进行显示。
107.另一方面,实施方式所涉及的控制数据创建装置10具有对被驱动装置24的1循环时间进行接收的接口,因此能够使用1循环时间对被驱动装置24的动作中途的经过时间进行计算。由此,不进行手动计算,就能够对被驱动装置24的动作中途的经过时间进行确认。另外,能够容易地设定从1循环的动作中途起的特定时间的被驱动装置24的动作位置,因此定位控制数据的创建效率提高。
108.另外,能够将定位控制数据图形化地显示、设定,因此能够直观地掌握主轴旋转1周期间的被驱动装置24的经过时间。另外,能够将速度数据、加速度数据、加加速度数据作为相同时间序列图形的波形而同时进行显示。因此,能够容易地掌握各波形数据的关系性,能够有效地对驱动装置即电动机23进行机械调整。
109.如上所述,在实施方式中,控制数据创建装置10如果接收到在显示出旋转信息的情况下对时间信息进行显示的指示,则将旋转信息变换为时间信息,并且使变换后的时间信息在显示装置30进行显示。另外,控制数据创建装置10如果接收到在显示出时间信息的情况下对旋转信息进行显示的指示,则将时间信息变换为旋转信息,并且使变换后的旋转信息在显示装置30进行显示。由此,用户能够容易地确认动作的中途阶段的主轴的旋转角度及动作中途的经过时间。因此,能够容易地编辑定位控制数据。
110.以上的实施方式所示的结构,表示本发明的内容的一个例子,也能够与其他公知技术进行组合,在不脱离本发明的主旨的范围,也能够对结构的一部分进行省略、变更。
111.标号的说明
112.10控制数据创建装置,11输入部,12要素选择切换部,13运算部,14运算结果存储
部,15显示控制部,16显示内容切换部,21控制器,22、25伺服放大器,23电动机,24被驱动装置,26主轴电动机,30显示装置,31~33输入栏,60、61、70点,101~105画面,201~204、231~233波形,211a、211b、212a、212b区间,301处理器,302存储器,303输入装置,304接口电路。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

