技术特征:
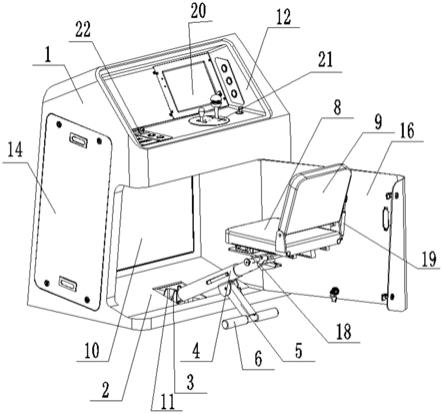
1.一种抽梗分梗机械臂,包括机械臂本体(100)以及位于所述机械臂本体(100)末端的手部(200),其特征在于,所述手部(200)上设置有机构行进轨道(4)以及由电控驱动单元控制的如下组件:用于夹持待处理烟叶的梗部的夹持机构(1)、用于将待处理烟叶的叶片与烟梗分离的抽梗机构(2)、用于将剥离叶片后的完整烟梗进行切割的分梗机构(3);
所述夹持机构(1)固定设置在所述手部(200),且所述抽梗机构(2)与所述分梗机构(3)均在所述机构行进轨道(4)上活动设置;或者,所述抽梗机构(2)与所述分梗机构(3)均固定设置在所述手部(200),且所述夹持机构(1)在所述机构行进轨道(4)上活动设置;
其中,所述夹持机构(1)包括至少一个夹爪;所述抽梗机构(2)包括能执行开合动作的第一上刀和第一下刀,且二者刀刃对向设置;所述分梗机构(3)包括能执行开合动作的第二上刀和第二下刀,且二者刀刃对向设置。
2.根据权利要求1所述的抽梗分梗机械臂,其特征在于,所述抽梗机构(2)还包括与所述第一上刀和/或所述第一下刀连接的第一弹性装置;
所述分梗机构(3)还包括与所述第二上刀和/或所述第二下刀连接的第二弹性装置。
3.根据权利要求2所述的抽梗分梗机械臂,其特征在于,所述抽梗机构(2)包括安装有所述第一上刀的第一上刀架,以及安装有所述第一下刀的第一下刀架,所述第一弹性装置设置在所述第一上刀架和/或所述第一下刀架中;
所述分梗机构(3)包括安装有所述第二上刀的第二上刀架,以及安装有所述第二下刀的第二下刀架,所述第二弹性装置设置在所述第二上刀架和/或所述第二下刀架中。
4.根据权利要求1所述的抽梗分梗机械臂,其特征在于,在所述分梗机构(3)上还设有用于检测第二上刀和第二下刀间距的光栅检测器(5)。
5.根据权利要求1所述的抽梗分梗机械臂,其特征在于,所述第一上刀和所述第一下刀均为半环形结构。
6.根据权利要求5所述的抽梗分梗机械臂,其特征在于,所述第一上刀和所述第一下刀的刀刃均设为斜铲状。
7.根据权利要求1~6任一项所述的抽梗分梗机械臂,其特征在于,所述机构行进轨道(4)还设有限位装置。
8.根据权利要求1~6任一项所述的抽梗分梗机械臂,其特征在于,在所述机构行进轨道(4)的下沿还安装有用于承接叶片的收集装置。
9.根据权利要求1~6任一项所述的抽梗分梗机械臂,其特征在于,所述抽梗机构(2)与所述分梗机构(3)集于一体。
10.根据权利要求1~6任一项所述的抽梗分梗机械臂,其特征在于,所述夹爪的顶部的宽度小于所述夹爪的根部的宽度。
技术总结
本发明公开了一种抽梗分梗机械臂,本发明的构思在于结合机器人技术,设计出专用于烟叶抽梗分梗操作的机械臂。具体是对机械臂的手部结构进行创新改良,以适应本发明应用场景的特定性。通过在机器臂的手部设置用于下述机构行进的轨道及由电控驱动单元控制的用于夹持烟叶梗部且具有夹爪结构的夹持机构、用于将叶片与烟梗分离且具备开合刀组的的抽梗机构以及用于切割完整烟梗且具备开合刀组的分梗机构,实现对烟叶抽梗分梗操作的自动化、拟人化,从而可以通过电控机器人的方式辅助进行抽梗分梗操作,不再需要打叶手撕等方式,本发明具有梗叶剥离彻底、烟梗切割便捷的显著优势,可为含梗率检测提供稳定、可靠的梗料。
技术研发人员:丁美宙;程东旭;马宇平;王瑞珍;孙觅;王鹏飞;崔廷;王浩宇
受保护的技术使用者:河南中烟工业有限责任公司
技术研发日:2021.04.20
技术公布日:2021.07.23
本文用于企业家、创业者技术爱好者查询,结果仅供参考。