本发明涉及烟草加工领域,尤其涉及一种抽梗分梗机械臂。
背景技术:
在卷烟制造工序中,对于物料进行相关检测是极为重要的一环,例如需要对同一批次内的烟叶进行含梗率检测,而为了实现含梗率检测需要在检测前对烟叶进行抽梗分梗处理。
目前多采用如下两种方法进行抽梗分梗操作:
(一)打叶法
该方法是采用较为占具空间的打叶风分设备,将待测烟叶样品打碎至较小粒度,再通过风分箱将打碎的烟片和烟梗进行分离,最后由人工收集烟梗后采用多层筛分装置筛分出粗梗和细梗。
而在烟草工业对工艺质量指标检测、控制实时性、在线性和准确性等要求越来越高的背景下,该方法凸显以下不足:(1)打碎操作相对较为“粗暴”,可能导致造碎的烟片和烟梗过于零散,影响梗叶分离效果;(2)被破坏的检测样品难以回掺至原配方继续使用,增大原料消耗;(3)使用该方法处理后进行含梗率检测,其检测结果受打叶参数、风分参数、筛分参数等诸多因素的稳定性影响,尤其是收集及筛分粗细梗的过程也容易受到人工操作影响;(4)设备结构复杂,维护工作繁琐。
(二)手撕法
该方法是通过人工手撕将叶梗分离,然后人工采用卡尺等工具,区分出不同粗细的烟梗。相比前述打叶法,该方法相对更为精细,且避免了因造碎过程而丢失掉一部分应当用于含梗率计算的可用烟梗。但是,该方法的不足之处则在于人工效率较低且同样掺入人工影响因素,而且由于纯手工操作难免剥离不净,导致烟叶残留进而影响后续的检测。
技术实现要素:
鉴于上述,本发明旨在提供一种抽梗分梗机械臂,以辅助规避上述传统的抽梗分梗方式的不足。
本发明采用的技术方案如下:
一种抽梗分梗机械臂,其中包括:机械臂本体以及位于所述机械臂本体末端的手部,其特征在于,所述手部上设置有机构行进轨道以及由电控驱动单元控制的如下组件:用于夹持待处理烟叶的梗部的夹持机构、用于将待处理烟叶的叶片与烟梗分离的抽梗机构、用于将剥离叶片后的完整烟梗进行切割的分梗机构;
所述夹持机构固定设置在所述手部,且所述抽梗机构与所述分梗机构均在所述机构行进轨道上活动设置;或者,所述抽梗机构与所述分梗机构均固定设置在所述手部,且所述夹持机构在所述机构行进轨道上活动设置;
其中,所述夹持机构包括至少两个夹爪;所述抽梗机构包括能执行开合动作的第一上刀和第一下刀,且二者刀刃对向设置;所述分梗机构包括能执行开合动作的第二上刀和第二下刀,且二者刀刃对向设置。
在其中至少一种可能的实现方式中,所述抽梗机构还包括与所述第一上刀和/或所述第一下刀连接的第一弹性装置;
所述分梗机构还包括与所述第二上刀和/或所述第二下刀连接的第二弹性装置。
在其中至少一种可能的实现方式中,所述抽梗机构包括安装有所述第一上刀的第一上刀架,以及安装有所述第一下刀的第一下刀架,所述第一弹性装置设置在所述第一上刀架和/或所述第一下刀架中;
所述分梗机构包括安装有所述第二上刀的第二上刀架,以及安装有所述第二下刀的第二下刀架,所述第二弹性装置设置在所述第二上刀架和/或所述第二下刀架中。
在其中至少一种可能的实现方式中,在所述分梗机构上还设有用于检测第二上刀和第二下刀间距的光栅检测器。
在其中至少一种可能的实现方式中,所述第一上刀和所述第一下刀均为半环形结构。
在其中至少一种可能的实现方式中,所述第一上刀和所述第一下刀的刀刃均设为斜铲状。
在其中至少一种可能的实现方式中,所述机构行进轨道还设有限位装置。
在其中至少一种可能的实现方式中,在所述机构行进轨道的下沿还安装有用于承接叶片的收集装置。
在其中至少一种可能的实现方式中,所述抽梗机构与所述分梗机构集于一体。
在其中至少一种可能的实现方式中,所述夹爪的顶部的宽度小于所述夹爪的根部的宽度。
本发明的构思在于结合机器人技术,设计出专用于烟叶抽梗分梗操作的机械臂。具体是对机械臂的手部结构进行创新改良,以适应本发明应用场景的特定性。通过在机器臂的手部设置用于下述机构行进的轨道及由电控驱动单元控制的用于夹持烟叶梗部且具有夹爪结构的夹持机构、用于将叶片与烟梗分离且具备开合刀组的的抽梗机构以及用于切割完整烟梗且具备开合刀组的分梗机构,实现对烟叶抽梗分梗操作的自动化、拟人化,从而可以通过电控机器人的方式辅助进行抽梗分梗操作,不再需要打叶手撕等方式,本发明具有梗叶剥离彻底、烟梗切割便捷的显著优势,可为含梗率检测提供稳定、可靠的梗料。
附图说明
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
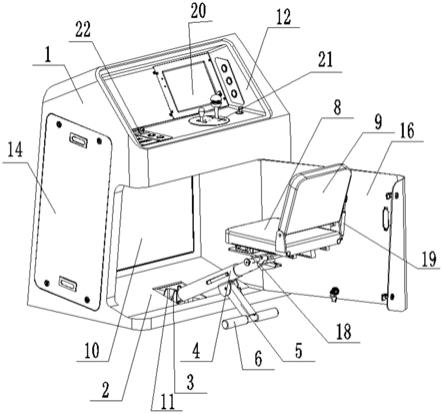
图1为本发明实施例提供的抽梗分梗机械臂的结构示意图;
图2为本发明实施例提供的抽梗分梗机械臂的局部侧视图;
图3为本发明实施例提供的机械臂的手部正视图。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
本发明提出了一种抽梗分梗机械臂的实施例,参照图1~图3所示,具体可以包括如下部件:机械臂本体100以及位于所述机械臂本体100末端的手部200(附图圈出示意),其中,所述手部200上设置有机构行进轨道4,以及由电控驱动单元(图中未示,本领域技术人员可以参考成熟的机器人电控方式,考虑采用一个或多个驱动部件对如下组件进行驱动控制)控制的如下组件:用于夹持待处理烟叶的梗部的夹持机构1、用于将待处理烟叶的叶片与烟梗分离的抽梗机构2、用于将剥离叶片后的完整烟梗进行切割的分梗机构3。其中,所述夹持机构1包括至少两个夹爪,优选地,为了更为方便地夹持住相对较细的烟叶梗部,所述夹爪的顶部的宽度可以小于所述夹爪的根部的宽度,更佳地,可以根据实际烟梗尺寸设计类似爪尖的结果。接着,所述抽梗机构2包括能执行开合动作的第一上刀和第一下刀,且二者刀刃对向设置;所述分梗机构3包括能执行开合动作的第二上刀和第二下刀,且二者刀刃对向设置。这里需说明的是本发明提及的上下,仅是便于描述及理解的相对方位措辞,而非必然处于绝对的上下位置。
还需指出的是所述夹持机构1可以固定设置在所述手部200,且所述抽梗机构2与所述分梗机构3均在所述机构行进轨道4上活动设置;或者,所述抽梗机构2与所述分梗机构3也可以均固定设置在所述手部200,而所述夹持机构1则在所述机构行进轨道4上活动设置。也即是说,夹持机构1夹持住梗部后,即可以在机构行进轨道4上移动,通过相对固定设置的上述刀组,实施抽梗、分梗操作;或者是,夹持机构1夹持住梗部后,处于相对固定的位置,通过在机构行进轨道4上移动所述抽梗机构2及所述分梗机构3,以实施抽梗、分梗操作。
考虑到夹持机构1还需要随着机械臂本体100旋转移动以夹持或释放烟叶梗部,因而图示中给出的是相对较优的,夹持机构1固定、抽梗机构2与分梗机构3移动的实施参考。
在实际操作中,为了便于更为干净彻底地将叶片从烟梗上分离,抽梗机构2的所述第一上刀和所述第一下刀均可以采用半环形结构,优选地,还可以配合特定结构的刀刃,例如在一些较佳实施例中,所述第一上刀和所述第一下刀的刀刃均设为斜铲状,使得最大切削直径可与烟叶样品适配甚至更佳,例如达到12mm。这里还需指出,抽梗机构2的主要目的是将叶片从烟梗上剥离,而非切断,因而所述第一上刀和所述第一下刀的刀刃的锋利程度可相对弱于前述第二上刀和第二下刀的刀刃的锋利程度,换言之,配合前述相对的半环形结构及斜铲状设计,可以理解为所述第一上刀和所述第一下刀属于刮刀类型,而分梗机构3的第二上刀和第二下刀则为切刀类型。
除此之外,还可以对上述实施例进行补充的,为了避免前述机构滑脱,可以在所述机构行进轨道4上设置限位装置,用于机构移动到位止动。进一步地,考虑到在进行抽梗操作时,剥离出的叶片有可能掉落,因而可以在所述机构行进轨道4的下沿安装至少一个用于承接叶片的收集装置(例如盒、篮等类似结构),也即是当上述夹持机构与抽梗机构配合将叶片剥离后,可以顺势掉落到轨道下方的收集装置中。以及,可以结合图示,将移动的所述抽梗机构2与所述分梗机构3集于一体,也即是构成双刀模组(模组之一可以理解为抽梗机构2的分离刀组,模组另一可以理解为分梗机构3的分段刀组)。
对于切割过程,也即是由分梗机构3执行的烟梗切段动作,可以预先按设置的一定长度或一定段数予以实施,这里提供了一种更佳的切段方式,即可以在所述分梗机构3上设置用于检测第二上刀和第二下刀间距的光栅检测器5。即通过检测第二上刀和第二下刀沿着完整烟梗表面行进过程中,上下刀刃空隙间隙得到烟梗直径,如果实测值与预设的烟梗直径值相等,则可以触发第二上刀和第二下刀执行剪切动作,得到了具有一定粗细的不同的烟梗段,此优选方案相比传统方法用卡具测量或目测,准确度具有极大的提升,例如当选用精度较高的光栅检测器(光栅尺)时甚至可以达到微米级检测。当然,此方案并非对本发明构思的限定,而是提供了一种可以配合分梗操作的硬件测量手段。
关于上述抽梗机构2及分梗机构3,还可以具体参考如下示例进行优化设置,例如在一些较佳实施例中,所述抽梗机构2还可以包括与所述第一上刀和/或所述第一下刀连接的第一弹性装置,而所述分梗机构3同样地,可以包括与所述第二上刀和/或所述第二下刀连接的第二弹性装置。设计该弹性装置的目的是在进行抽梗、分梗操作时,可以使上刀和或下刀沿着烟梗直径的变化而自动调整上下刀的刀刃间距(烟叶的梗柄具有粗细渐变的客观属性,此属于常识,本发明不作赘述),以达到将烟叶与烟梗完全分离以及前述配合直径测量手段进行烟梗段切割时的操作精度。
基于此构思,更为具体地,所述抽梗机构2可以包括用于安装所述第一上刀的第一上刀架,以及用于安装所述第一下刀的第一下刀架,而所述第一弹性装置设置在所述第一上刀架和/或所述第一下刀架中;同理地,所述分梗机构3可以包括用于安装所述第二上刀的第二上刀架,以及用于安装所述第二下刀的第二下刀架,而所述第二弹性装置设置在所述第二上刀架和/或所述第二下刀架中。可以理解的是,设计刀架的目的既是可以装配上述弹性装置及刀具,也可以是与前文提及的电控驱动单元连接,即电控驱动单元通过控制刀架的上下位置,可以调整抽梗机构2及分梗机构3的初始状态、进刀状态等,而在抽梗分梗时的移动过程中,则可以由弹性装置调节上下刀距。
最后,结合前文内容,提供一种本发明的操作示例供实施参考,首先由机械臂本体的旋转移动以及固定设置在手部的夹持机构的旋转移动,夹住待处理的烟叶样品的梗部,接着前述双刀模组中的分离刀组(抽梗机构)按预设的间距初始值贴在烟叶梗部的粗端,并沿着行进轨道从烟叶梗部的粗端向细端移动以实现叶片剥离;此时双刀模组位于没有叶片的完整烟梗的细端外侧,接着双刀模组逆向运动,运动前双刀模组中的分段刀组(分梗机构),先闭合至预设的初始间距,由此初始间距接近并进入烟梗的细端,贴着烟梗向粗端移动,移动过程中分段刀组上下刀片由弹性装置的作用逐渐张开,与此同时光栅尺检测分段刀组上下刀之间的间距空隙,一旦检测达到预设直径值后,则双刀模组停止移动,且分段刀组迅速执行切断动作,第一个烟梗分段切下,之后再继续上述向细端的移动过程,以此类推,可以切下若干个烟梗分段。
需指出,上述操作工程仅是基于前述机械臂方案的一种可能的实现方式,在实际操作中,可以根据实际情况对机械臂的运转、手部运转、抽梗分梗动作等进行按需设计,此非本发明的侧重点,因而不作赘述和限定。
综上所述,本发明的构思在于结合机器人技术,设计出专用于烟叶抽梗分梗操作的机械臂。具体是对机械臂的手部结构进行创新改良,以适应本发明应用场景的特定性。通过在机器臂的手部设置用于下述机构行进的轨道及由电控驱动单元控制的用于夹持烟叶梗部且具有夹爪结构的夹持机构、用于将叶片与烟梗分离且具备开合刀组的的抽梗机构以及用于切割完整烟梗且具备开合刀组的分梗机构,实现对烟叶抽梗分梗操作的自动化、拟人化,从而可以通过电控机器人的方式辅助进行抽梗分梗操作,不再需要打叶手撕等方式,本发明具有梗叶剥离彻底、烟梗切割便捷的显著优势,可为含梗率检测提供稳定、可靠的梗料。
本发明实施例中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示单独存在a、同时存在a和b、单独存在b的情况。其中a,b可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项”及其类似表达,是指的这些项中的任意组合,包括单项或复数项的任意组合。例如,a,b和c中的至少一项可以表示:a,b,c,a和b,a和c,b和c或a和b和c,其中a,b,c可以是单个,也可以是多个。
以上依据图式所示的实施例详细说明了本发明的构造、特征及作用效果,但以上仅为本发明的较佳实施例,需要言明的是,上述实施例及其优选方式所涉及的技术特征,本领域技术人员可以在不脱离、不改变本发明的设计思路以及技术效果的前提下,合理地组合搭配成多种等效方案;因此,本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。