1.本发明涉及管道漏损检测领域,尤其涉及一种漏损定位的不确定性评估方法及系统。
背景技术:
2.目前,供水管网漏损的探查及定位是供水管理中不可或缺的一部分。互相关法是漏损定位中的常用方法,其基本原理是利用漏损点产生的漏损噪声来计算出漏损位置。但是,漏损噪声是一种随机信号,其产生机理十分复杂,且传播过程中易受干扰,因此,我们测到的信号必然是随机信号的几个样本,给漏损定位带来了不确定性。此外,由于漏损检测相关仪的算法、硬件本身不可避免存在误差,也有可能影响漏损定位的精度。因此,受限于漏损噪声的随机性本质特征,计算所得的漏损位置并非实际管道中真正的漏损位置,且现有的漏损位置定位过程中仅能得出“漏损误差与哪种因素有关”的模糊结论,这一模糊性也使得用户在无法顺利找到漏点的时候,难以判断是由于仪器固有的误差导致的定位错误,还是漏损本身不存在。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的之一在于提供一种漏损定位的不确定性评估方法,可输出漏损位置及其置信区间,为用户提供专业化的结果分析功能。
4.本发明的目的之二在于提供一种漏损定位的不确定性评估系统。
5.本发明的目的之三在于提供一种电子设备。
6.本发明的目的之四在于提供一种存储介质。
7.本发明的目的之一采用如下技术方案实现:
8.一种漏损定位的不确定性评估方法,包括:
9.接收输入的管路参数,根据管路参数获取当前管路所对应的声速数据及其置信区间;
10.多次采集当前管路上漏损位置所产生的噪声信号,根据噪声信号计算出漏损噪声传播时间差及其置信区间;
11.调用声速数据和漏损噪声传播时间差以计算当前管路的漏损位置,并根据声速数据的置信区间以及时间差的置信区间推算出管路漏损位置的置信区间进行输出。
12.进一步地,计算漏损噪声传播时间差的方法为:
13.在同一管路上设有至少两个采样点,并在每个采样点所在位置上装设有传感器,利用两个传感器测量位于两个传感器之间的漏损位置所产生的噪声信号;
14.计算两个传感器采集到漏损位置所产生的噪声信号的时间间隔以获得漏损噪声传播时间差。
15.进一步地,所述传感器为布置在管壁表面的加速度传感器或将探头置入管路液体中的水听器。
16.进一步地,所述漏损位置的计算公式为:
[0017][0018]
其中,d为管路数据中的管路长度;v为噪声传播速度;t
d
为漏损噪声传到两个传感器的时间差。
[0019]
进一步地,计算管路漏损位置的置信区间的公式为:
[0020][0021]
其中v
l
和v
u
分别为漏损噪声传播速度所对应置信区间的上限值和下限值;t
l
和t
u
分别为噪声传播时间差所对应置信区间的上限值和下限值。
[0022]
进一步地,计算漏损噪声传播速度的置信区域的方法为:
[0023]
预先定义不同管材不同管径的定义声速
[0024]
对不同管材不同管径的管路进行多次声速实际测量以获得实测声速v
ij
,根据实测声速v
ij
和定义声速之间的差值获得声速误差公式:
[0025]
根据声速误差公式计算出声速的置信区间为[v
l
,v
u
]=[v~ v~[μ
‑
t1‑
p/2
(n)
·
s],v~ v~[μ t1‑
p/2
(n)
·
s];
[0026]
其中μ为ε
ij
的样本均值s为ε
ij
的样本均方根值t1‑
p/2
(n)是预设显著性水平p下t分布的值,n为所采用的样本容量。
[0027]
进一步地,计算噪声传播时间差的置信区间的方法为:
[0028]
对同一管路进行多次测试以获得多个时间差样本;
[0029]
将多个时间差样本作为误差样本值推算出时间差的置信区间为[t
l
,t
u
]=[m
‑
t1‑
p/2
(m)
·
s,m t1‑
p/2
(m)
·
s];
[0030]
其中,其中m为t
di
的样本均值s为t
di
的样本均方根值t1‑
p/2
(n)是预设显著性水平p下t分布的值,m为测试次数。
[0031]
本发明的目的之二采用如下技术方案实现:
[0032]
一种漏损定位的不确定性评估系统,执行如上述的漏损定位的不确定性评估方法,包括:
[0033]
声速计算模块,用于预先对不同管路的声速数据及其对应的置信区间进行计算;
[0034]
时间差计算模块,用于采集当前管路上漏损位置所产生的噪声信号,根据噪声信号计算出漏损噪声传播时间差及其置信区间;
[0035]
漏损处理模块,用于根据当前管路的声速数据和漏损噪声传播时间差计算出当前管路的漏损位置,并根据声速数据的置信区间及时间差的置信区间获得管路漏损位置的置信区间进行输出。
[0036]
本发明的目的之三采用如下技术方案实现:
[0037]
一种电子设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的漏损定位的不确定性评估方法。
[0038]
本发明的目的之四采用如下技术方案实现:
[0039]
一种存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的漏损定位的不确定性评估方法。
[0040]
相比现有技术,本发明的有益效果在于:
[0041]
本发明根据声速数据及漏损噪声传播时间差计算出漏损位置的具体数值外,还对漏损位置的置信区间进行计算,以获得漏损位置对应的误差范围,确定漏损定位的不确定性因素,辅助操作者决策开挖或使用听音杆重点检测的范围。
附图说明
[0042]
图1为本发明两个传感器对管路进行测试的示意图。
[0043]
图2为本发明两个传感器的信号传输示意图。
[0044]
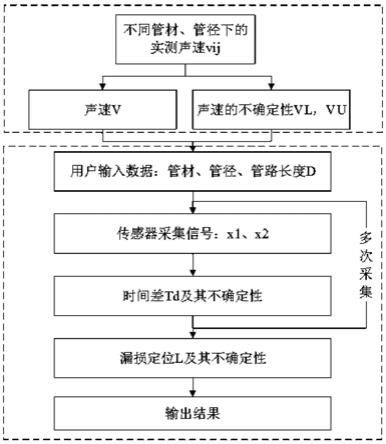
图3为本发明漏损定位系统的模块示意框图。
具体实施方式
[0045]
下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
[0046]
实施例一
[0047]
本实施例提供一种漏损定位的不确定性评估方法,通过该漏损定位方法可输出漏损位置的具体数值以判断漏损位置,同时也可输出漏损位置的置信区间,以辅助操作者决策开挖或使用听音杆重点检测的范围,并在无法顺利找到漏点的情况下可以对原因有一个初步预判,以提高漏损位置检测的准确性。
[0048]
如图3所示,本实施例的漏损定位的不确定性评估方法具体包括如下步骤:
[0049]
步骤s1:接收输入的管路参数,根据管路参数获取当前管路所对应的声速数据及其置信区间;其中,用户输入管路参数包括管材、管径及管路长度等;
[0050]
步骤s2:多次采集当前管路上漏损位置所产生的噪声信号,根据噪声信号计算出漏损噪声传播时间差及其置信区间;
[0051]
步骤s3:根据声速数据和漏损噪声传播时间差计算出当前管路的漏损位置,并根据声速数据及时间差的置信区间获得管路漏损位置的置信区间。
[0052]
本实施例使用相关法进行漏损定位的基本原理是:如图1所示,将至少两个传感器布置在一段管路上,本实施例以两个传感器对同一管路进行测量的方式来测量漏损位置。本实施例中传感器可以是布置在管壁表面的加速度传感器,也可以是探头投入管路水中的水听器。
[0053]
如图2所示,本实施例的两个传感器分别布设在同一管路上,每个传感器对应连接一台发射机,用于将检测到的噪声信号经发射机发送至接收机上,接收机通过无线天线接
收信号后对其进行数字信号处理,并通过互相关法进行漏损定位,将结果通过接收机上的触摸屏展示出来。
[0054]
本实施例中若两传感器测到的噪声信号分别为x1(t)和x2(t),计算其互相关函数可得:
[0055][0056]
该互相关函数取到峰值的时间τ=t
d
就是漏损噪声传到两个传感器的时间差。
[0057]
获得漏损噪声传播时间差t
d
后,根据用户输入的待测管路的管路参数以获取管路长度d,并结合漏损噪声在待测管路中的传播速度v,即可反推出待测管路的漏损位置:
[0058][0059]
而本实施例中漏损位置中,d、v、t
d
的误差都会成为漏损定位的误差。
[0060]
其中,管路长度d的误差来源主要来自人为误差,用户可根据自己获取这一误差的手段对误差进行初判,若存在人为误差,则可将该输入误差增加到最终漏损位置的定位误差结果中;若不存在人为误差,则可忽略该输入误差。其中输入误差为:
[0061][0062]
而声速v的误差主要来源于管路本身的材质,即在管路生产、制造过程中包括尺寸和材料误差,此外,管道的使用年限不同,其老化程度也不同,不同老化程度的管路对于声音在管路内的传播速度也存在差异;再加上实际涉及的管路型号较多,因此本实施例的漏损定位方法在实际应用之前,可预先对不同管材、不同管径的管路进行声速测试,预先获知不同管路所对应的声速数据及其对应置信区间;在实际应用时只需根据用户输入的管路参数即可直接调用该管路对应的声速数据,从而节省反复测量的时间,从而提高效率。
[0063]
本实施例对于不同管路的声速计算方法为:
[0064][0065]
其中c是声速,k、ρ分别是水的压缩体积模量和密度,e为管壁材料的杨氏模量,d为管壁内径,e为管壁厚度,c是修正系数,对充水管路在无试验数据的情况下通常取1。
[0066]
而不同管路的声速数据所对应的置信区间的方法为:
[0067]
预先定义不同管材不同管径的定义声速
[0068]
分别对不同管材不同管径的管路进行多次声速实际测量,多次测量所得的实测声速v
ij
分别为将多个实测声速v
ij
作为误差样本值用于计算声速数据所对应的置信区间;其中某一种管材/管径下的实测数据量m
i
可以为1甚至0;
[0069]
根据实测声速v
ij
和定义声速之间的差值获得声速误差公式:
[0070][0071]
根据可信区间=阳性样本平均值
±
标准差的定义推论出计算误差的置信区间为:
[0072]
[μ
‑
t1‑
p/2
(n)
·
s,μ t1‑
p/2
(n)
·
s]
ꢀꢀꢀ
(公式6);
[0073]
其中μ为ε
ij
的样本均值s为ε
ij
的样本均方根值t1‑
p/2
(n)是一定显著性水平p下t分布的值,可通过查表得到,n是所采用的样本容量。
[0074]
再根据公式(5),计算声速v的置信区间为:
[0075]
[v
l
,v
u
]=[v
~
v
~
[μ
‑
t1‑
p/2
(n)
·
s],v
~
v
~
[μ t1‑
p/2
(n)
·
s]]
ꢀꢀ
(公式7);
[0076]
其中,v
l
和v
u
分别为漏损噪声传播速度所对应置信区间的上限值和下限值。
[0077]
本实施例在计算管路声速数据所对应置信区间过程中,若是对某一管材/管径下进行了较多次的实验,对该管材/管径下的不确定性度量可以使用对应管材、管径的测试数据进行;如果某一管材下针对部分管径进行了较多实验,通过实验外推或拟合确定该管材其他管径的值,则对该管材的不确定性度量可使用该管材下所有数据的管径作为基础数据样本;如果某一管材的数据较少或缺乏,则可使用所有管材、管径下可获得的测试数据作为基础样本进行不确定性度量。
[0078]
而本实施例t
d
在实际使用过程中,根据现场测试的噪声数据进行互相关法运算得到。其误差/分散性来源包括:1)采样本身是随机过程的样本,因此根据样本计算的结果也是实际t
d
的抽样值;2)由于通信过程中的各种硬件误差,二者采集到的测试数据可能不是完全同步的;3)算法本身由于理论简化而存在误差。
[0079]
事实上,尽管来源2)、3)的误差物理本质并非随机采样带来,但是不同的采样样本对其影响是非系统的,否则很容易通过对公式2)中的系数进行修正来消除。因此,通过多次采样来获取其概率分布。
[0080]
故本实施例中计算噪声传播时间差的置信区间的方法为:
[0081]
对同一管路进行多次测试以获得多个时间差样本;假设对同一段被侧管路进行了m次测试,得到了m个t
d
的样本{t
d1
,t
d2
,...,t
dm
};
[0082]
将多个时间差样本作为误差样本值推算出时间差的置信区间为:
[0083]
[t
l
,t
u
]=[m
‑
t1‑
p/2
(m)
·
s,m t1‑
p/2
(m)
·
s]
ꢀꢀ
(公式8);
[0084]
其中,其中m为t
di
的样本均值s为t
di
的样本均方根值t1‑
p/2
(n)是预设显著性水平p下t分布的值,可通过查表获得,m为测试次数。
[0085]
本实施例计算出时间差t
d
和声速v的置信区间后,即可合并得到定位l的置信区间为:
[0086][0087]
实施例二
[0088]
本实施例提供一种漏损定位的不确定性评估系统,本实施例的系统执行如实施例一所述的漏损定位的不确定性评估方法,漏损定位的不确定性评估系统具体包括:
[0089]
声速计算模块,用于预先对不同管路的声速数据及其对应的置信区间进行计算;
[0090]
时间差计算模块,用于采集当前管路上漏损位置所产生的噪声信号,根据噪声信号计算出漏损噪声传播时间差及其置信区间;
[0091]
漏损处理模块,用于根据当前管路的声速数据和漏损噪声传播时间差计算出当前管路的漏损位置,并根据声速数据及时间差的置信区间获得管路漏损位置的置信区间。
[0092]
实施例三
[0093]
本实施例提供一种电子设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例一中的漏损定位的不确定性评估方法;另外,本实施例还提供一种存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的漏损定位的不确定性评估方法。
[0094]
本实施例中的设备及存储介质与前述实施例中的方法是基于同一发明构思下的两个方面,在前面已经对方法实施过程作了详细的描述,所以本领域技术人员可根据前述描述清楚地了解本实施例中的系统的结构及实施过程,为了说明书的简洁,在此就不再赘述。
[0095]
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。