1.本发明涉及机器人技术领域,尤其涉及加油机器人、控制方法、系统及存储介质。
背景技术:
2.加油站传统加油是通过人工服务给汽车加油,伴随科技发展进步,人们生活水平提高近年加油站也兴起汽车自动加油技术研发,便有了加油站给车辆自动加油技术的沉淀,只是目前普遍技术止步在研发实验阶段,未能实现加油站投入自动加油使用。
3.现有自动加油技术:
4.1.现阶段已有多款设备实现车辆自动加油功能技术,但符合加油站高危工作环境具备防爆安全性能设备技术暂未有过。
5.2.现阶段技术对于单款车型外油箱盖开/关可成功实现,但对于多款车型外油箱盖开/关实现困难。
6.3.现阶段技术对于单款车型内油箱盖开/关可成功实现,但对于多款车型内油箱盖开/关实现困难。
7.4.现阶段技术实现从取枪、车辆加油、挂油枪这一过程,主流技术有4种方式
8.方式1:将油枪固定在机器人手爪上,视觉引导多关节机器人实现加油工作。
9.方式2:将油枪固定在油枪工装夹具内,机器人手爪抓取带枪工装夹具,视觉引导多关节机器人实现加油工作。
10.方式3:将特制可切换油号品种加油枪固定在机器人手爪上,视觉引导多关节机器人实现加油工作。
11.方式4:将油枪放置在特制枪托架上,多关节机器人夹爪抓取枪托架上油枪,视觉引导多关节机器人实现加油工作。
12.5.现阶段加油枪控油方式有3种方式:
13.方式一:采用特制工装夹具拨动油枪控油。
14.方式二:采用单气缸加拨杆拨动油枪控油。
15.方式三:特制油枪配专用气缸控油。
16.6.自动加油区域车辆停靠位置度、外油箱盖开/闭、内油箱盖开/闭、油枪取/给油/挂枪这一全过程,以及适应多车型自动加油,现阶段技术止步在单一车型实验测试阶段,且加油稳定可考性技术未成熟,设备造价成本高、工序编排较为分散、油品切换存在缺陷。
17.综上,背景技术主要存在如下缺陷:
18.1.自动加油设备防爆安全等级不符合加油站高危工作环境场所规范要求。
19.2.无法实现多款车型外油箱、内油箱盖开/关就无法满足油站多车型自动加油。
20.3.取枪、车辆加油、挂油枪技术问题及缺陷:
21.问题缺陷1:油枪固定在机器人手爪上,无法切换油号品种。
22.问题缺陷2:油枪固定在油枪工装夹具内,取、挂油枪定位精度高,制造成本高,工作效率低,后期维护成本高。
23.问题缺陷3:采用特制可切换油号品种加油枪固定在机器人手爪上,出油口管道易产生油号品种混油现象。
24.4.加油枪控油技术问题及缺陷:
25.问题缺陷1:采用特制工装夹具拨动油枪控油,应急情况下,如需快速切换为人工加油方式较为困难。
26.问题缺陷2:采用单气缸加拨杆拨动油枪控油,气缸推杆受力大,使用受命短不易维护,易发生油枪控油故障,加油稳定性差。
27.问题缺陷3:特制油枪配专用气缸控油,制造成本高。
28.5.自动加油设备对车辆停靠位置精准度要求过高,驾驶车辆司机不易操作;
29.6.由于现有自动加油技术各工序实现自动化技术不成熟,导致加油工序编排较为分散、整体自动加油设备成本高、维护费用高、加油稳定性差、工作效率低、无法实现多车型自动加油、安全等级低等一系列问题。
30.7.现有的理论仅仅做了油箱外盖的识别,离实现自动加油还有很大距离,同时油箱外盖外形变化很大:大小不一(车型不一大小不一),形状不一(有圆形,圆角方形等),以及车的油箱口位置也是有较大变化的,仅仅靠模版识别尚未能做到市场多款车的识别。
31.8.汽车停放位置姿态也没做任何考虑,汽车过来每次停放位置会有一定的差异的,这给相机的识别带来了困扰。
32.9.加油站是室外空间,光照的强度等外部因素也会影响到视觉识别的准确性。
技术实现要素:
33.本发明提供了一种加油机器人,包括机械臂、相机和加油执行机构,所述加油执行机构安装在所述机械臂上,由所述机械臂带动所述加油执行机构进行运动,所述相机对加油的汽车进行拍照,引导所述机械臂运动、及所述加油执行机构对汽车的加油。
34.作为本发明的进一步改进,所述加油执行机构包括油箱外盖打开及关闭装置、油枪抓取抠枪控油装置和油箱内盖打开及关闭装置,所述油箱外盖打开及关闭装置用于打开及关闭汽车油箱外盖,所述油箱内盖打开及关闭装置用于打开及闭合汽车内油箱盖,所述油枪抓取抠枪控油装置用于模仿人手握加油枪进行加油,所述油箱外盖打开及关闭装置、油枪抓取抠枪控油装置和油箱内盖打开及关闭装置安装在一起构成复合手爪,所述复合手爪上安装所述相机。
35.本发明还公开了一种加油机器人的控制方法,包括如下步骤:
36.步骤1:通过相机对停在加油区域的汽车进行拍照,识别汽车油箱外盖,获取汽车油箱外盖位置;
37.步骤2:根据汽车油箱外盖的位置,控制油箱外盖打开及关闭装置打开汽车油箱外盖;
38.步骤3:通过相机对汽车进行拍照,判断汽车油箱外盖是否打开,若是,那么执行步骤4,否则返回执行步骤2;
39.步骤4:识别汽车内油箱盖,获取汽车内油箱盖位置,根据汽车内油箱盖的位置,控制油箱内盖打开及关闭装置打开汽车内油箱盖;
40.步骤5:通过相机对汽车进行拍照,判断汽车内油箱盖是否打开,若是,那么执行步
骤6,否则返回执行步骤4;
41.步骤6:获取注油口位置信息,根据注油口位置信息,控制油枪抓取抠枪控油装置拿起加油枪向注油口内加油;
42.步骤7:加油完成后,控制油枪抓取抠枪控油装置将加油枪放回加油机枪托内;
43.步骤8:控制油箱内盖打开及关闭装置将汽车内油箱盖盖好;
44.步骤9:通过相机对汽车进行拍照,判断汽车内油箱盖是否盖好,若是,那么执行步骤10,否则返回执行步骤8;
45.步骤10:控制油箱外盖打开及关闭装置将汽车油箱外盖盖好;
46.步骤11:通过相机对汽车进行拍照,判断汽车油箱外盖是否盖好,若是,那么结束,否则返回执行步骤10。
47.本发明提供了一种加油机器人的控制系统,包括:存储器、处理器以及存储在所述存储器上的计算机程序,所述计算机程序配置为由所述处理器调用时实现本发明所述的控制方法的步骤。
48.本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现本发明所述的控制方法的步骤。
49.本发明的有益效果是:本发明的加油机器人自动识别车辆油箱盖位置、自动打开车辆外油箱盖、自动打开车辆内油箱盖、自动在枪托内取油枪、自动加油、自动将油枪放回枪托内、自动关闭车辆内油箱盖、自动关闭车辆外油箱盖,加油机器人自动复位完成车辆自动加油工作。
附图说明
50.图1是机械臂结构示意图;
51.图2是关节模组分解结构示意图;
52.图3是关节模组结构示意图;
53.图4是关节模组剖面结构示意图;
54.图5是油箱外盖打开及关闭装置分解结构示意图;
55.图6是油箱外盖打开及关闭装置示意图,未安装护罩;
56.图7是油箱外盖打开及关闭装置示意图,已安装护罩;
57.图8是油箱外盖打开及关闭装置剖面图;
58.图9是油枪抓取抠枪控油装置剖面图;
59.图10是油枪抓取抠枪控油装置立体结构示意图;
60.图11是油枪抓取抠枪控油装置结构示意图;
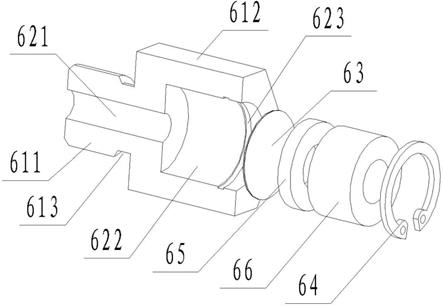
61.图12是油箱内盖打开及关闭装置结构示意图;
62.图13是油箱内盖打开及关闭装置剖面图;
63.图14是图13的a处放大图;
64.图15是油箱内盖打开及关闭装置分解结构示意图;
65.图16是夹头的打开状态结构示意图;
66.图17是夹头的闭合状态结构示意图;
67.图18是夹头的立体结构示意图;
68.图19是复合手爪结构示意图;
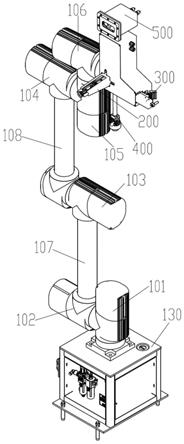
69.图20是加油机器人结构示意图;
70.图21是控制方法流程图。
具体实施方式
71.本发明公开了一种加油机器人,包括机械臂100、油箱外盖打开及关闭装置200、油枪抓取抠枪控油装置300和油箱内盖打开及关闭装置400。
72.如图1所示,所述机械臂100包括关节模组、第一连接臂107和第二连接臂108,所述关节模组为六个,六个关节模组的结构原理相同,每个关节模组均能独立进行旋转运动,六个关节模组分别为第一关节模组101、第二关节模组102、第三关节模组103、第四关节模组104、第五关节模组105和第六关节模组106;所述第二关节模组102与所述第一关节模组101相连,所述第一关节模组101的转动带动所述第二关节模组102进行同步转动;所述第一连接臂107一端与所述第二关节模组102相连,所述第一连接臂107另一端与所述第三关节模组103相连,所述第二关节模组102通过所述第一连接臂107带动所述第三关节模组103进行同步转动;所述第二连接臂108与所述第四关节模组104相连,所述第三关节模组103驱动所述第二连接臂108进行转动;所述第四关节模组104与所述第五关节模组105相连,所述第四关节模组104驱动所述第五关节模组105进行转动;所述第五关节模组105与所述第六关节模组106相连,所述第五关节模组105驱动所述第六关节模组106进行转动。
73.如图2
‑
4所示,所述关节模组包括电机109、电机座110、底座111、电机保护盖112,所述电机保护盖112安装在所述电机座110上使其内部具有一腔体,所述电机109安装在所述腔体内,所述电机109用于驱动所述底座111进行转动。
74.所述关节模组还包括第一同步轮113、第二同步轮114和第一同步带115、第一减速器,所述电机109的输出轴与所述第一同步轮113相连,所述第一同步带115套于所述第一同步轮113外表面和所述第二同步轮114外表面,所述第一减速器与所述第二同步轮114相连,所述底座111与所述第一减速器安装在一起。
75.第一减速器为谐波减速器,谐波减速器包括刚轮116、柔轮117和波发生器118。
76.工作时,由外接的伺服驱动器控制电机109给电,电机109的输出轴带动第一同步轮113转动,经由第一同步带115带动第二同步轮114转动,通过第二同步轮114带动刚轮116和柔轮117转动,从而使底座111与电机座110进行相对旋转运动。第一同步带115优选为防静电第一同步带。
77.所述关节模组还包括电机固定板119、电机支撑板120,所述电机支撑板120安装在所述电机座110上,所述电机固定板119安装在所述电机支撑板120,所述电机109安装在所述电机固定板119上。
78.在安装第一同步带115时,为了方便安装第一同步带115,第一同步带115不是处于张紧状态,当第一同步带115安装完毕后,本发明通过张力调节件121和张力调节档条125完成第一同步带115张紧,具体为:电机支撑板120上安装张力调节档条125,第一同步轮113安装于所述电机固定板119下方,电机固定板119与电机支撑板120没有固定死,电机固定板119预紧在电机支撑板120上,此时电机固定板119可在电机支撑板120上移动,将张力调节件121卡于电机固定板119与所述张力调节档条125之间,那么便可以使电机固定板119向后
移动,进而带动第一同步轮113向后移动,从而张紧第一同步带115。
79.所述机械臂100还包括连接件129,所述第六关节模组106的底座111与所述连接件129相连,连接件129优选为法兰。
80.所述第二关节模组102的底座111与所述第一关节模组101的电机座110相连,所述第一连接臂107一端与所述第二关节模组102的电机座110相连,所述第一连接臂107另一端与所述第三关节模组103的电机座110相连,所述第三关节模组103的底座111与所述第二连接臂108一端相连,所述第二连接臂108另一端与所述第四关节模组104的电机座110相连,所述第四关节模组104的底座111与所述第五关节模组105的电机座110相连,所述第五关节模组105的底座111与所述第六关节模组106的电机座110相连。
81.所述机械臂100还包括机器人固定座130,所述第一关节模组101的底座111与所述机器人固定座130相连,所述机器人固定座130设有防爆接线盒。
82.所述电机109为隔爆伺服电机。
83.通过关节模组、第一连接臂107和第二连接臂108使连接件129进行x、y、z坐标运动。
84.本发明将隔爆伺服电机应用于机械臂中,达到加油机器人防爆等级,符合加油站安全规范。
85.如图5
‑
8所示,油箱外盖打开及关闭装置200包括吸盘固定座201、吸盘202,所述吸盘202与所述吸盘固定座201相连,所述吸盘202用于吸附汽车油箱外盖。
86.该油箱外盖打开及关闭装置200还包括负压产生机构、吸盘连接杆203,所述吸盘连接杆203一端与所述吸盘固定座201相连,所述吸盘连接杆203另一端与所述吸盘202相连,所述吸盘连接杆203设有孔,所述吸盘连接杆203的孔与所述吸盘202连通,所述吸盘连接杆203上安装有气嘴204,所述气嘴204与所述吸盘连接杆203的孔连通,所述负压产生机构通过连接管与所述气嘴204相连,所述空压机用于产生负压。负压产生机构由空压机、以及与空压机相连的真空发生器相连。通过负压使吸盘202吸住汽车油箱外盖,便于打开汽车油箱外盖。
87.该油箱外盖打开及关闭装置200还包括按压头205,所述按压头205为两个,所述吸盘202位于两个按压头205之间。加油完毕后,通过按压头205关闭汽车油箱外盖。
88.按压头205优选由聚氨酯材料制成。
89.该油箱外盖打开及关闭装置200还包括摆杆支架206、摆臂件207、伸缩摆杆208、拉簧209,摆臂件207能够在所述摆杆支架206上进行摆动(例如,摆臂件207通过转轴安装在摆杆支架206上,从而使摆臂件207能够进行摆动),所述拉簧209一端与所述摆臂件207相连,所述拉簧209另一端与所述摆杆支架206相连,摆臂件207设有腔体,所述伸缩摆杆208伸入所述摆臂件207的腔体内,且伸缩摆杆208能够在所述摆臂件207的腔体内进行移动,所述伸缩摆杆208一端与所述吸盘固定座201相连。
90.为了使伸缩摆杆208能够顺畅的在摆臂件207的腔体内进行纵向移动,伸缩摆杆208外表面套装有直线轴承216、压缩弹簧210。
91.如果吸盘固定座201发生转动,那么连接管也会跟着转动,为了防止吸盘固定座201和连接管产生转动,那么,本发明通过防旋转机构防止吸盘固定座201发生转动。
92.所述防旋转机构包括防旋转限位块211,所述防旋转限位块211一端与所述吸盘固
定座201安装在一起,所述防旋转限位块211另一端贴靠在所述摆臂件207上面,从而防止所述吸盘固定座201转动。
93.马鞍型尼龙扎带固定座212安装在防旋转限位块211上,马鞍型尼龙扎带固定座212用于固定连接管。
94.该油箱外盖打开及关闭装置200还包括按压头固定件213,所述按压头固定件213为两个,两个按压头固定件213分别安装在所述摆杆支架206两侧,两个按压头205分别安装在两个按压头固定件213上。
95.该油箱外盖打开及关闭装置200还包括固定座板214和护罩215,所述护罩215安装在所述固定座板214上,所述护罩215开设有两个孔,两个所述按压头205分别从护罩215的两个孔中伸出。摆杆支架206安装在所述固定座板214上。
96.油箱外盖打开及关闭装置200由控制系统控制运动,由按压头205按压汽车油箱外盖表面使油箱外盖弹开,由吸盘202吸附在汽车油箱外盖表面弹起部位区域,由装有吸盘202的自摆臂机构随油箱外盖翻转角度过程吸盘202一直吸附在油箱外盖表面,成功实现拉开汽车油箱外盖功能,此时装有吸盘202的自摆臂机构自动复位。
97.关外油箱盖由控制系统控制油箱外盖打开及关闭装置200运动,由按压头205拨动油箱外盖回位,由按压头205按压汽车油箱外盖表面弹开部位区域,实现关闭油箱外盖功能。
98.由于多车型油箱外盖种类繁多,采用装有吸盘202的自摆臂机构随油箱外盖翻转角度过程吸盘202一直吸附在油箱外盖表面,降低加油机器人精度要求,提高了吸盘202吸附效果,实用多车型油箱外盖开盖。吸盘自摆臂机构具有自动复位功能,开盖过程方便吸盘202定位吸附,关盖时不易与油箱外盖产生触碰干涉而影响关盖。
99.油箱外盖打开及关闭装置200安装在机械臂100上,具体为固定座板214与连接件129安装在一起。
100.如图9
‑
11所示,油枪抓取抠枪控油装置300包括基板301、第一驱动模块302、第二驱动模块303、油枪夹持静件304、油枪夹持动件305、控油抠枪杆306,所述油枪夹持静件304安装在所述基板301上,所述第一驱动模块302安装在所述基板301上,所述第一驱动模块302与所述油枪夹持动件305相连,所述第一驱动模块302用于驱动所述油枪夹持动件305与所述油枪夹持静件304进行扣合或分离,当所述油枪夹持动件305与所述油枪夹持静件304扣合在一起时用于夹紧加油枪的手柄,所述第二驱动模块303用于驱动所述控油抠枪杆306运动,所述控油抠枪杆306用于扣动加油枪的扳手进行加油。
101.所述油枪夹持静件304和所述油枪夹持动件305均呈c形,所述油枪夹持动件305与所述油枪夹持静件304扣合在一起时,其内部呈空心的圆弧形。
102.所述油枪夹持动件305与所述基板301为活动连接,具体为所述油枪夹持动件305与所述基板301通过转轴307相连。。
103.所述第一驱动模块302为第一气缸,所述第一气缸输出轴与所述油枪夹持动件305相连,所述第一驱动模块302驱动所述油枪夹持动件305在所述基板301上进行转动。
104.所述油枪夹持静件304由胶条材料制成。
105.该油枪抓取抠枪控油装置300还包括油枪控油拉杆308,所述第二驱动模块303为第二气缸,所述第二气缸输出轴与所述油枪控油拉杆308相连,所述控油抠枪杆306安装在
所述油枪控油拉杆308上。
106.所述第二气缸输出轴通过第一气缸转接头309与所述油枪控油拉杆308相连,所述控油抠枪杆306通过螺钉安装在所述油枪控油拉杆308上。
107.所述油枪控油拉杆308上安装有拉杆盖板310和防护盖311,控所述油抠枪杆306与所述油枪夹持静件304位置邻近。
108.油枪抓取抠枪控油装置300实现的功能是:由控制系统控制实现自动取加油枪、自动控制给油、自动将油枪挂放在加油机枪托内。
109.油枪抓取抠枪控油装置300模仿人手握枪加油过程,手撑结合大拇指握油枪手法、实指与中指抠油枪手法,用精简小巧机构实现这两项功能,而实用与现阶段通用加油机改造,成本低实用性强。
110.如图12
‑
15,油箱内盖打开及关闭装置400包括设备本体、夹头403,所述设备本体包括第一驱动单元401、第二驱动单元402,所述第一驱动单元401用于驱动所述夹头403转动,所述第二驱动单元402用于使所述夹头403打开或闭合。
111.该油箱内盖打开及关闭装置400还包括套管404、拉杆405,所述拉杆405伸入所述套管404内,且所述拉杆405外表面与所述套管404内表面之间具有间隙,所述第一驱动单元401用于驱动所述套管404进行转动,所述夹头403与所述套管404安装在一起,所述第二驱动单元402用于驱动所述拉杆405进行运动,通过所述拉杆405使所述夹头403打开或闭合。
112.所述第一驱动单元401为伺服电机,所述伺服电机用于驱动所述套管404进行转动,该伺服电机优选为隔爆伺服电机。
113.所述设备本体还包括第二减速器406、第三同步轮407、第四同步轮408、第二同步带409,所述伺服电机输出轴与所述第二减速器406相连,所述第二减速器406带动所述第三同步轮407转动,所述第二同步带409套于所述第三同步轮407外表面和所述第四同步轮408外表面,通过所述第二同步带409实现所述第四同步轮408与所述第三同步轮407进行同步转动,所述套管404与所述第四同步轮408安装在一起,所述套管404与所述第四同步轮408进行同步转动。
114.所述第二驱动单元402为第三气缸,所述第三气缸用于驱动所述拉杆405进行运动。
115.所述设备本体还包括浮动接头410、第二气缸转接头411,所述第三气缸输出轴与所述浮动接头410相连,所述第二气缸转接头411一端与所述浮动接头410相连,所述第二气缸转接头411另一端与所述拉杆405相连。当拉杆405随着夹头403转动时,第三气缸输出轴与浮动接头410相连,根据浮动接头410的结构原理,浮动接头410随着拉杆405转动时,第三气缸输出轴不会跟随浮动接头410转动。
116.所述设备本体还包括轴承412,所述轴承412套装于所述套管404外表面。
117.所述设备本体还包括电机座板413、对接板414、调节顶板415、固定底板416、气缸固定座426,在安装第二同步带409时,为了方便安装第二同步带409,第二同步带409不是处于张紧状态,当第二同步带409安装完毕后,本发明通过调节顶板415完成第二同步带409张紧,具体为:第二减速器406安装在电机座板413上,所述电机座板413安装在气缸固定座426上,电机座板413与气缸固定座426没有固定死,电机座板413预紧在气缸固定座426上,此时电机座板413可在气缸固定座426上移动,将调节顶板415安装在所述电机座板413上,调节
顶板415的螺纹孔内安装有调节螺丝428,通过调节螺丝428顶住对接板414,那么便可以使电机座板413向后移动,进而带动第三同步轮407向后移动,从而张紧第二同步带409。
118.所述设备本体400还包括感应器固定片417、光电开关418、感应器419,所述感应器固定片417与所述固定底板416相连,所述光电开关418与所述感应器固定片417相连,所述套管404外表面安装有挡光片427,所述光电开关418与所述挡光片427配合用于检测套管404是否复位转到原点;感应器419安装在所述第三气缸上,所述感应器419用于感应第三气缸输出轴的状态,检测第三气缸输出轴是推还是拉的状态。
119.该油箱内盖打开及关闭装置400还包括壳体425,所述设备本体安装于所述壳体425内,所述夹头403从所述壳体425中伸出,所述壳体425由组装在一起的盖体420和盖板421构成。
120.壳体425上安装有转接板422,气缸固定件423安装在壳体内部,第三气缸安装在气缸固定件423上。
121.如图16
‑
18所示,所述夹头403包括夹头本体4031、夹持部件,所述夹持部件为两个,所述夹持部件包括第一连接杆4032、第二连接杆4033、第三连接杆4034、夹持块4035、夹持头4036、第一连接部件4037、第二连接部件4038、第三连接部件4039、第四连接部件4040,所述第一连接杆4032一端与所述拉杆405为转动连接,所述第一连接杆4032另一端通过所述第一连接部件4037与所述夹头本体4031实现转动连接,所述第二连接杆4033一端与所述第一连接杆4032另一端相连,所述第二连接杆4033另一端通过所述第四连接部件4040与所述夹持块4035实现转动连接,所述第三连接杆4034一端通过所述第二连接部件4038与所述夹头本体4031实现转动连接,所述第三连接杆4034另一端通过所述第三连接部件4039与所述夹持块4035实现转动连接,所述第一连接部件4037、所述第二连接部件4038、所述第三连接部件4039、所述第四连接部件4040呈平行四边形排列,所述第二连接杆4033与所述第三连接杆4034平行排布,所述夹持头4036与所述夹持块4035安装在一起,通过两个夹持头4036夹持汽车内油箱盖424的扭柄。
122.当拉杆405向下推时,带动两个夹持块4035向外移动,从而使夹头403打开。当拉杆405向上拉时,带动两个夹持块4035向内移动,从向使夹头403闭合,卡紧汽车内油箱盖424的扭柄。
123.汽车内油箱盖424的扭柄的形状可能各不相同,为了使夹持块4035更好的贴紧扭柄,所以,夹持头4036与夹持块4035为活动连接,夹持头4036能够在夹持块4035上进行摆动,例如夹持头4036安装在夹持块4035的转轴上,这样夹持头4036就能更好的贴紧夹持扭柄。
124.第一连接杆4032一端与拉杆405为转动连接是指第一连接杆4032一端与拉杆405相连,且第一连接杆4032一端能够在拉杆405上转动。
125.第一连接杆4032另一端通过第一连接部件4037与夹头本体4031实现转动连接是指第一连接杆4032另一端通过第一连接部件4037能够在夹头本体4031上转动,例如,该第一连接部件4037为转轴。
126.第二连接杆4033和第一连接杆4032可以是两个部件相连,当然第二连接杆4033和第一连接杆4032也可以是一体成型。
127.第二连接杆4033另一端通过第四连接部件4040与夹持块4035实现转动连接是指
第二连接杆4033另一端通过第四连接部件4040能够夹持块4035上转动,例如,第四连接部件4040为转轴。
128.所述第三连接杆4034一端通过所述第二连接部件4038与所述夹头本体4031实现转动连接是指第三连接杆4034一端通过第二连接部件4038能够夹头本体4031上转动,例如,第二连接部件4038为转轴。
129.所述第三连接杆4034另一端通过所述第三连接部件4039与所述夹持块4035实现转动连接是指第三连接杆4034另一端通过第三连接部件4039能够在夹持块4035上转动,例如,第三连接部件4039为转轴。
130.油箱内盖打开及关闭装置400工作时,由伺服电机驱动器控制隔爆伺服电机给电旋转,隔爆伺服电机输出轴端部联接在第二减速器406,由第二减速器406输出轴端部带动第三同步轮407旋转,经由第二同步带409传动,带动第四同步轮408旋转将旋转力传递给套管404带动夹头403旋转,实现扭松/扭紧汽车内油箱盖424旋转运动,由光电开关418检测校对夹头403回起始原点位置,借助机器人运动、视觉识别汽车内油箱盖424位置特征,将夹头403对准汽车内油箱盖424的扭柄,由第三气缸驱动拉杆405进行运动,通过拉杆405使夹头403夹紧汽车内油箱盖424的扭柄或松开汽车内油箱盖424的扭柄。通过夹头403打开或闭合、夹头403的旋转及机械臂运动实现汽车内油箱盖424旋转开盖或旋转关盖功能。
131.该油箱内盖打开及关闭装置400具有如下技术特点:
132.1.旋转汽车内油箱盖424过程扭力可控。
133.2.通过视觉识别机构方式能自动对准汽车内油箱盖424的扭柄。
134.3.夹头403体积小巧,旋转汽车内油箱盖424过程不易与车辆油箱口内部边沿产生触碰干涉,具备适应多车型油箱内盖扭内盖空间条件。
135.4.油箱内盖打开及关闭装置400使用机械运动,提高了安全等级。
136.如图19所示,将油箱外盖打开及关闭装置200、油枪抓取抠枪控油装置300和油箱内盖打开及关闭装置400安装在一起构成复合手爪。壳体425上的转接板422与连接件129相连,从而实现将复合手爪安装在第六关节模组106的底座111上。
137.复合手爪有利于实现加油机器人自动加油运动控制、做到动作精简、降低设备制造成本,提高工作效率。
138.如图20所示,加油机器人还包括相机500,相机500安装在复合手爪上,复合手爪安装在机械臂100上。
139.本发明的加油机器人可满足加油站高危环境现场作业,实现多车型智能自动加油功能。
140.由后台智能电控设备程序(控制系统)触发本发明的加油机器人自动识别车辆油箱盖位置、自动打开车辆外油箱盖、自动打开车辆内油箱盖、自动在枪托内取油枪、自动加油、自动将油枪放回枪托内、自动关闭车辆内油箱盖、自动关闭车辆外油箱盖,加油机器人自动复位完成车辆自动加油工作。
141.如图21所示,本发明还公开了一种加油机器人的控制方法,包括如下步骤:
142.步骤1:通过相机500对停在加油区域的汽车进行拍照,识别汽车油箱外盖,获取汽车油箱外盖位置;
143.步骤2:根据汽车油箱外盖的位置,控制油箱外盖打开及关闭装置200打开汽车油
箱外盖;
144.步骤3:通过相机500对汽车进行拍照,判断汽车油箱外盖是否打开,若是,那么执行步骤4,否则返回执行步骤2;
145.步骤4:识别汽车内油箱盖424,获取汽车内油箱盖424位置,根据汽车内油箱盖424的位置,控制油箱内盖打开及关闭装置400打开汽车内油箱盖424;
146.步骤5:通过相机500对汽车进行拍照,判断汽车内油箱盖424是否打开,若是,那么执行步骤6,否则返回执行步骤4;
147.步骤6:获取注油口位置信息,根据注油口位置信息,控制油枪抓取抠枪控油装置300拿起加油枪向注油口内加油;
148.步骤7:加油完成后,控制油枪抓取抠枪控油装置300将加油枪放回加油机枪托内;
149.步骤8:控制油箱内盖打开及关闭装置400将汽车内油箱盖424盖好;
150.步骤9:通过相机500对汽车进行拍照,判断汽车内油箱盖424是否盖好,若是,那么执行步骤10,否则返回执行步骤8;
151.步骤10:控制油箱外盖打开及关闭装置200将汽车油箱外盖盖好;
152.步骤11:通过相机500对汽车进行拍照,判断汽车油箱外盖是否盖好,若是,那么结束,否则返回执行步骤10。
153.因为汽车是人工开到指定的停车位置的,每次停车的位置都是有比较大的误差,但是如果汽车的位置变化,而相机500的位置固定的话会导致拍照不全或者无法拍到需要的信息,或者因为汽车的位置姿态变化太大无法获取到精准的汽车油箱外盖等信息的位置。因此本发明相机500是不在固定地方拍照,比如车量倾斜了,相机500安装在复合手爪上,通过控制复合手爪,预先拍照确定汽车的位置以及姿态,然后控制复合手爪把相机500的拍照位置移动到与汽车的位置姿态平行(拍照的最佳位置姿态),保证在最高的精度的视觉识别下来做视觉的识别,相机500的每次识别拍照都是根据汽车的位置姿态来做自动调整,这样可以纠正停车不规范所带来的问题,保证识别的精度及稳定度,具体的实施例如下:
154.在步骤1中,首先通过相机500对进入加油区域的汽车进行拍照(例如,可以控制机械臂100和/或复合手爪的运动带动相机500运动,在多个位置拍摄多张照片),计算出汽车相对于复合手爪的位置姿态,从而得到拍照的最佳位置姿态,控制复合手爪到达最佳位置姿态,通过相机500对汽车进行拍照识别出汽车油箱外盖,获取汽车油箱外盖位置;
155.在步骤2中,根据汽车油箱外盖的位置,控制油箱外盖打开及关闭装置200打开汽车油箱外盖;
156.在步骤3中,首先控制复合手爪到达最佳位置姿态(拍照位置在车注油口的正前上方保证了精度要求),然后通过相机500对汽车进行拍照,判断汽车油箱外盖是否打开,若是,那么执行步骤4,否则返回执行步骤2;
157.在步骤4中,识别汽车内油箱盖424,获取汽车内油箱盖424位置,根据汽车内油箱盖424的位置,控制油箱内盖打开及关闭装置400打开汽车内油箱盖424;
158.在步骤5中,首先控制复合手爪到达最佳位置姿态,通过相机500对汽车进行拍照,判断汽车内油箱盖424是否打开,若是,那么执行步骤6,否则返回执行步骤4;
159.在步骤6中,获取注油口位置信息,根据注油口位置信息,控制油枪抓取抠枪控油
装置300拿起加油枪向注油口内加油;
160.在步骤7中,加油完成后,控制油枪抓取抠枪控油装置300将加油枪放回加油机枪托内,
161.在步骤8中,控制油箱内盖打开及关闭装置400将汽车内油箱盖424盖好;
162.在步骤9中,首先控制复合手爪到达最佳位置姿态,通过相机500对汽车进行拍照,判断汽车内油箱盖424是否盖好,若是,那么执行步骤10,否则返回执行步骤8;
163.在步骤10中,控制油箱外盖打开及关闭装置200将汽车油箱外盖盖好;
164.在所述步骤11中,首先控制复合手爪到达最佳位置姿态,通过相机500对汽车进行拍照,判断汽车油箱外盖是否盖好,若是,那么结束,否则返回执行步骤10。
165.现有的市场车辆的汽车油箱外盖有方形、圆形、圆角方形等大小形状不一,而且汽车内油箱盖424也有不同的大小和形状,这就给识别汽车油箱外盖和汽车内油箱盖424带来了极大的挑战,为了解决这一技术问题,本发明使用模糊识别,具体为:识别汽车油箱外盖和/或汽车内油箱盖424时,首先提取出汽车油箱外盖和/或汽车内油箱盖424的轮廓,识别轮廓大小以及形状构成特征数据,将特征数据与数据库中的数据进行比对,智能判断是否为汽车油箱外盖和/或汽车内油箱盖424,每智能判断一次,就将特征数据存储至数据库一次,这样数据库中存储的数据就越来越多,为下一次识别带来了便利,提高了准确性。
166.因为现有的视觉在光线变化时出来的图像变化很大,比如晚上和白天,有阳光与没阳光的天气都是影响很大的,单一的曝光等参数是无法识别出来的,甚至无法看到任何图像,为了解决这一技术问题,本发明使用光强度传感器检测外部光线的强度,根据外部光线的强度调整相机500的曝光值;同时根据当时的日照时间,通过深度学习神经算法生成该时刻最优的曝光值参数,使得相机500获得最优的图片,保证识别率以及识别效果,能适应环境的光线变化,天气变化等外部干扰。同时,相机500的镜头前增加偏振光玻璃,在一定情度上减低外部光线的干扰。
167.在进行工作时,用户(司机)可以通过手机app进行下单,下单时填写好油品(例如92号汽油)、加油的钱数,加油机器人会根据用户的下单信息对汽车进行自动加油。
168.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。