本发明属于智能控制技术领域,具体涉及一种识别不同类型瓶盖的智能开瓶方法及智能开瓶器。
背景技术:
市场上销售的饮料(尤其是酒类)、调味品等,有的是采用螺旋瓶盖的瓶子包装,为了防止在运输和销售过程中瓶盖松动,大都拧得非常紧。遇到这种情况,人们一般使用开瓶器打开瓶盖。现有的开瓶器有普通塑料开瓶器,酒刀(小刀开瓶器),欧式开瓶器,t型开瓶器,合金开瓶器(蝴蝶开瓶器),真空开瓶器,电动开瓶器,台式开瓶器,墙挂式开瓶器和迷你开瓶器。其中,电动开瓶器可全自动操作,方便了用户进行开瓶操作;日常生活中瓶子的种类较多,各种瓶子的开启方式也不同,而现有的电动开瓶器仅仅能对一类型的瓶子进行开瓶。
技术实现要素:
有鉴于此,本发明提供了一种识别不同类型瓶盖的智能开瓶方法及智能开瓶器,用以解决现有开瓶器无法开启不同种类的瓶盖的技术问题。
本发明采用的技术方案是:
第一方面本发明提供了一种识别不同类型瓶盖的智能开瓶方法,所述方法包括:
确定有带有瓶盖的容器移动到开瓶盖的位置;
识别瓶盖的类型信息;
驱动与所述瓶盖的类型信息相匹配的开瓶机构移动到瓶盖上方;
依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离。
优选地,所述方法在依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离之后,还包括:
控制uvc光源对所述分离瓶盖后的所述容器的瓶口进行照射灭菌。
优选地,所述方法在所述识别瓶盖的类型信息之前还包括:
检测瓶所在位置的环境光亮度;
依据所述环境光亮度,控制瓶所在位置的光源调节光亮度以便于识别瓶盖的类型。
优选地,所述瓶盖的类型信息包括以下中的至少一种:饮料瓶盖和调味料瓶盖。
优选地,所述依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离包括:
当所述容器为饮料容器且为葡萄酒瓶时,识别所述葡萄酒瓶的品牌信息和瓶装容量;
根据所述葡萄酒瓶的品牌信息和瓶装容量,确定所述瓶盖类型信息,包括:瓶塞类别、瓶塞的材质、瓶塞的长度;
依据所述瓶塞在所述葡萄酒瓶上的位置以及所述瓶盖类型信息,控制所述开瓶机构以预设的力度和速度将瓶塞从所述葡萄酒瓶中分离出来。
优选地,所述依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型,控制所述开瓶机构将所述瓶盖从所述容器上分离包括:
当所述容器为调味料瓶时,确定所述调味料瓶的品牌信息、材质和瓶装容量;
依据所述调味料瓶的品牌信息和瓶装容量确定所述瓶盖在所述调味料瓶上的位置、瓶盖类别、大小及材质;
依据所述瓶盖在所述调味料瓶上的位置、瓶盖类别、大小及材质,控制所述开瓶机构以预设的力度和速度将瓶塞从所述调味料瓶中分离出来。
第二方面本发明提供了一种识别不同类型瓶盖的智能开瓶器,所述识别不同类型瓶盖的智能开瓶器包括:
容器位置确定模块,所述容器位置确定模块用于确定有带有瓶盖的容器移动到开瓶盖的位置;
瓶盖类型识别模块,所述瓶盖类型识别模块用于识别瓶盖的类型信息;
开瓶机构驱动模块,所述开瓶机构驱动模块用于驱动与所述瓶盖的类型信息相匹配的开瓶机构移动到瓶盖上方;
瓶盖分离控制模块,所述瓶盖分离控制控制模块用于依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离。
第三方面,本发明提供了一种采用第一方面所述的识别不同类型瓶盖的智能开瓶方法的智能开瓶器,所述智能开瓶器包括:信号收发模块、控制电路、电源、指令输入模组、uvc光源、照明光源、环境光传感器及图像采集模组;
信号收发模块用于接收所述控制电路发出的指令或发送反馈信号至控制电路;
电源,用于对整个智能开瓶器提供电源;
指令输入模组用于接收用户输入的指令;
控制电路根据用户输入指令执行相应的控制;
uvc光源用于对瓶口进行灭菌操作;
环境光传感器用于采集瓶所在环境的光亮度,
照明光源,用于根据环境光亮度调节亮度照射到瓶上;
图像采集模组用于对瓶的标签图像和瓶身图像进行采集。
优选地,所述智能开瓶器还包括:底座,设于底座上的若干开瓶机构。
优选地,所述开瓶机构包括:夹持件和驱动件,所述夹持件用于夹持位于瓶口的瓶盖,所述驱动件驱动夹持件相对瓶口运动,以从瓶上分离瓶盖。
综上所述,本发明的有益效果如下:本发明的识别不同类型瓶盖的智能开瓶方法和智能开瓶器在待开启的瓶盖移动到开瓶位置后对瓶盖的类型进行识别,然后用于瓶盖类型相匹配的开瓶机构来开启瓶盖。在开启瓶盖时控制相应的开瓶机构根据容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息来开启瓶盖,因此针对不同的容器以及不同的瓶盖类型,本发明均可以用与该容器和瓶盖最匹配的开瓶机构和方式实现快速准确的开启。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单地介绍,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,这些均在本发明的保护范围内。
图1为本发明实施例1中识别不同类型瓶盖的智能开瓶方法的流程图;
图2为本发明实施例1中当容器为酒瓶时控制开瓶机构开瓶的方法的流程图;
图3为本发明实施例1中当容器为调味品时控制开瓶机构开瓶的方法的流程图;
图4为本发明实施例2中识别不同类型瓶盖的智能开瓶器的结构框图;
图5为本发明实施例3中识别不同类型瓶盖的智能开瓶器的结构示意图;
图6为图5中a-a处的剖视图;
图7为图5中b-b处的剖视图;
图8为本发明实施例3中识别不同类型瓶盖的智能开瓶器的电路模块示意图;
图9为本发明实施例4中开瓶机构的剖视结构示意图;
图10为本发明实施例4中开瓶机构处于开瓶状态下的结构示意图;
图11为本发明实施例4中开瓶机构取出瓶塞时的结构示意图。
图中零件部件及编号:
101、信号收发模块;102、控制电路;103、电源;104、指令输入模组;105、uvc光源;106、照明光源;107、环境光传感器;108、图像采集模组;500、第二开瓶机构;600、第一开瓶机构;610、外套;611、第一螺旋连接板;612、限位凸起;620、内套;621、第二螺旋连接板;622、支撑板;623、滑动板;624、限位槽;630、驱动件;631、双轴电机;632、第一螺旋轴;633、第二螺旋轴;640、夹持件;641、套筒;642、夹持连杆;643、夹持抵杆;650、打孔件;800、存储容器;810、瓶口;820、瓶塞;900、第三开瓶机构;1000、图像采集模块;1100、限位机构;1110、第一限位件;1120、第二限位件;1130、第一支撑件;114、第二支撑件;1150、第一弹簧;1160、第二弹簧;1200、驱动机构;1210、电机;1211、输出轴的轴线;1220、旋转支撑件;1300、底座;1310、支撑架。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。如果不冲突,本发明施例以及实施例中的各个特征可以相互结合,均在本实发明的保护范围之内。
实施例1
如图1所示,本实施例公开一种识别不同类型瓶盖的智能开瓶方法,所述方法包括以下步骤:
s1:确定有带有瓶盖的容器移动到开瓶盖的位置;这里通常采用摄像头或者传感器来检测带有瓶盖的容器的移动位移,当移动到指定位置时,容器自身被固定,比如夹持件夹持住,或者其它固定机构如凹槽等或者粘性器件将容器粘在支撑面上或者真空吸附件将容器吸附固定住。
s2:识别瓶盖的类型信息;
其中,瓶盖的类型信息包括以下中的至少一种:饮料瓶盖和调味料瓶盖。当然本发明申请主要围绕家庭、厨房、餐饮、酒吧等场所中常用的饮料瓶盖和调味料瓶盖,这些瓶盖从材质来说,通常为玻璃瓶盖、塑料瓶盖、金属瓶盖等。形状也是多样,如易拉罐的拉环,也包括在本发明的金属瓶盖内。每一种类型的瓶盖可以根据需要设置相应的开瓶器,后面中会有相应举例。
s3:驱动与所述瓶盖的类型信息相匹配的开瓶机构移动到瓶盖上方;
例如当瓶塞为软质瓶塞时开瓶机构可以采用t形开瓶器。例如当瓶塞为强度较弱硬度较高的瓶塞时,开瓶机构可以采用蝶形开瓶器,蝶形开瓶器的钻头钻入软木塞,蝶形开瓶器的双臂也向上抬升,抬升到尽头后,只需要按下蝶形开瓶器的双臂,酒塞就被拔出了。例如当瓶盖为带有锡纸的瓶盖时开瓶机构可以采用海马刀开瓶器。例如当葡萄酒为年份久远的老酒时开瓶机构可以采用ah-so开瓶器,将ah-so开瓶器的两铁片插入软木塞和酒瓶边缘的缝隙,然后慢慢自右向左旋转并向上拨出软木塞。
s4:依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离。这里不同的容器以及瓶盖位置的差异以及瓶盖类型上的差异,都需要采取相对应的开瓶控制方法,有的如果开瓶时力度过大会导致瓶盖损坏,严重者甚至导致瓶口也损坏。
如图2所示,所述依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离包括:
s41:当所述容器为饮料容器且为葡萄酒瓶时,识别所述葡萄酒瓶的品牌信息和瓶装容量;由于葡萄酒瓶的瓶盖多样,不同品牌信息的葡萄酒采用的葡萄酒瓶不论是瓶容量还是瓶口的尺寸均存在差异,不同品牌信息的葡萄酒所采用的瓶盖也多样,市场上常见的葡萄酒瓶盖有软木塞、螺旋盖和玻璃盖等多种类型。当然本发明会预先收集各品牌信息葡萄酒的外观,容量等相关数据,建立相应的数据库,然后从品牌信息、葡萄酒瓶容量等方面入手。甚至于同一酒庄在主品牌下的子品牌不同,不同年份的葡萄酒瓶的瓶盖类型也有差异,尺寸也存在差异。
s42:根据所述葡萄酒瓶的品牌信息和瓶装容量,确定所述瓶盖类型信息,包括:瓶塞类别、瓶塞的材质、瓶塞的长度;通过将待开瓶的葡萄酒瓶的品牌信息以及瓶装容量与数据库预设的各葡萄酒瓶的品牌信息以及瓶装容量等进行比对分析,找出相应品牌信息与瓶装容量的葡萄酒瓶,然后获取其瓶盖类型信息。待开盖的葡萄酒瓶的品牌信息和瓶装容量信息是可以通过图像识别技术识别出来的。
s43:依据所述瓶塞在所述葡萄酒瓶上的位置以及所述瓶盖类型信息,控制所述开瓶机构以预设的力度和速度将瓶塞从所述葡萄酒瓶中分离出来。
当瓶盖为较硬的木塞时,开瓶机构预设的力度和速度较大,而当瓶盖为较软的木塞时,开瓶机构预设的力度和速度则较小。这里,开瓶机构预设的力度和速度为在厂商出厂前采集确定,当然也可在出厂后用户在智能开瓶器上去做相应的设置,比如在不损害瓶盖和瓶口的前提下,把开瓶力度和速度适当加大。
如图3所示,所述依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离包括:
s44:当所述容器为调味料瓶时,确定所述调味料瓶的品牌信息、材质和瓶装容量;如采用老干妈品牌的辣椒瓶为玻璃,但瓶盖为金属,因此对调味料瓶的开盖方式就不同,由于玻璃易碎,而金属盖需要采取旋转拧开,这就对开瓶机构在夹持玻璃瓶时要求力度不用过大,而开瓶机构在开瓶盖时需要对应的开瓶方法。又如常见的采用塑料的酱油瓶,有的瓶盖也是塑料制成,而且瓶盖需要在倒完酱油后,继续拧紧到酱油瓶上,这就使得对酱油瓶盖的开启时尽量不要损害瓶盖,力度不能过大。还有一些如料酒瓶等其也是有自身的瓶盖设计特点。但总体的开瓶控制方法都在本发明的构思内。
s45:依据所述调味料瓶的品牌信息和瓶装容量确定所述瓶盖在所述调味料瓶上的位置、瓶盖类别、大小及材质;先采用图像识别技术识别出调味料瓶的品牌信息和瓶装容量,然后根据与数据库中的进行比对,查找到该调味料品牌信息和瓶装容量后,再获取数据库中预先存储的瓶盖信息。
s46:依据所述瓶盖在所述调味料瓶上的位置、瓶盖类别、大小及材质,控制所述开瓶机构以预设的力度和速度将瓶塞从所述葡萄酒瓶中分离出来。
例如当瓶盖为金属瓶盖时可以采用不锈钢起子作为开瓶机构,且预设的力度和速度较大。例如当瓶盖为塑料瓶盖时,可以采用铝合金起子作为开瓶机构,且预设的力度和速度较大较小,也可以采用金属小到作为开瓶机构划开塑料瓶盖。
由于环境光的影响,容易造成无法准确识别出瓶盖的类型(主要是指对瓶的品牌信息和瓶装容量无法准确采集),导致这些的原因是有时瓶的颜色、瓶上的标签较小,品牌文字、瓶装容量的文字等较难识别,品牌名称如英文、法文、意大利文等文字的识别难度,瓶装容量的数字较小或者数字字体原因,对此,本发明实施例在上述智能开瓶的过程中,还进一步进行了改进,在所述识别瓶盖的类型信息之前还包括:
s01:检测瓶所在位置的环境光亮度;这里采用普通的亮度传感器即可检测出。
s02:依据所述环境光亮度,控制瓶所在位置的光源调节光亮度以便于识别瓶盖的类型。本步骤主要包括:
输入环境光亮度信息;
获取瓶的品牌信息和瓶装容量所在区域的颜色信息;
根据环境光亮度信息以及颜色信息,控制光源的发光亮度;
对瓶的品牌信息和瓶装容量进行图像采集;
识别出瓶的品牌信息和瓶装容量;
根据所述品牌信息和瓶装容量确定出所述瓶盖的类型。
本实施例根据环境光亮度来调节光源的亮度,使最终照射至瓶盖的光可以清晰地将瓶盖照亮,这样瓶盖识别的准确性可以得到进一步地提高。
瓶盖打开后,如果容器内的饮品在饮用或者倾倒至其它容器的过程中流经容器的瓶口,则容易被留存在瓶口处的细菌、病毒等微生物污染,对此在本实施例中,所述方法在依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离之后,还包括:控制uvc光源对所述分离瓶盖后的所述容器的瓶口进行照射灭菌。其中短波紫外线简称uvc,是波长200~280nm(纳米)的紫外光线,该波段的紫外光线可以有效杀灭细菌和病毒等微生物。
实施例2
本发明实施例2对应于本发明实施例1公开了一种识别不同类型瓶盖的智能开瓶器,该开瓶器包括:
容器位置确定模块,用于确定有带有瓶盖的容器移动到开瓶盖的位置;
瓶盖类型识别模块,用于识别瓶盖的类型信息;
开瓶机构驱动模块,用于驱动与所述瓶盖的类型信息相匹配的开瓶机构移动到瓶盖上方;
瓶盖分离控制模块,用于依据所述容器的信息、所述瓶盖在所述容器上的位置以及瓶盖的类型信息,控制所述开瓶机构将所述瓶盖从所述容器上分离。
该开瓶器还包括第一开瓶机构和第二开瓶机构,第一开瓶机构用于对第一种存储容器进行开瓶,第二开瓶机构用于对第二种存储容器进行开瓶,第一种存储容器的开瓶方式与第二种存储容器的开瓶方式不同。当然,本发明并不仅有第一开瓶机构和第二开瓶机构,也可针对瓶盖类型的需求增设多个开瓶机构,每一开瓶机构对应相应的瓶盖开启方式不同。
所述瓶盖的类型信息包括以下中的至少一种:饮料瓶盖和调味料瓶盖。当所述容器为饮料容器且为葡萄酒瓶时,该瓶盖分离控制模块进一步包括:
用于识别所述葡萄酒瓶的品牌信息和瓶装容量的单元;
用于根据所述葡萄酒瓶的品牌信息和瓶装容量,确定所述瓶盖类型信息,包括:瓶塞类别、瓶塞的材质、瓶塞的长度的单元;
用于依据所述瓶塞在所述葡萄酒瓶上的位置以及所述瓶盖类型信息,控制所述开瓶机构以预设的力度和速度将瓶塞从所述葡萄酒瓶中分离出来的单元。
当所述容器为调味料瓶时,该瓶盖分离控制模块进一步包括:
用于确定所述调味料瓶的品牌信息、材质和瓶装容量的单元;
用于依据所述调味料瓶的品牌信息和瓶装容量确定所述瓶盖在所述调味料瓶上的位置、瓶盖类别、大小及材质的单元;
用于依据所述瓶盖在所述调味料瓶上的位置、瓶盖类别、大小及材质,控制所述开瓶机构以预设的力度和速度将瓶塞从所述葡萄酒瓶中分离出来的单元。
本实施例中识别不同类型瓶盖的智能开瓶器可适用于不同类型瓶盖进行智能开启。当需要开启某一类型瓶盖时,在获取到瓶盖所在瓶的相关信息(如品牌信息、瓶装容量)后,从数据库中查询瓶盖的信息,然后控制对应的开瓶机构(第一开瓶机构或第二开瓶机构)以预设的力度和速度将瓶盖(包括瓶塞)从瓶中分离出来。
实施例3
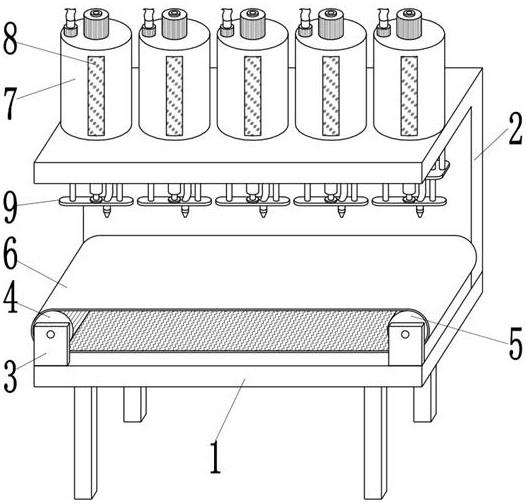
请参见图5至图7所示,本发明实施例3公开了一种采用上述实施例1中的识别不同类型瓶盖的智能开瓶方法的智能开瓶器。该智能开瓶器包括底座1300、第一开瓶机构600、第二开瓶机构500、第三开瓶机构900、限位机构1100、驱动机构1200。如图8所示,该智能开瓶器还进一步包括:信号收发模块101、控制电路102、电源103、指令输入模组104、uvc光源105、照明光源106、环境光传感器107、图像采集模组108。
第一开瓶机构600用于对第一种存储容器800进行开瓶,第二开瓶机构500用于对第二种存储容器800进行开瓶,第三开瓶机构900用于对第三种存储容器800进行开瓶;第一种存储容器800的开瓶方式与第二种存储容器800的开瓶方式不同,第一种存储容器800的开瓶方式与第三种存储容器800的开瓶方式不同,第二种存储容器800的开瓶方式与第三种存储容器800的开瓶方式不同。
如图5所示,在底座1300上设有支撑架1310、限位机构1100和图像采集模块1000。该限位机构1100用于限制存储容器800位于开瓶位置,该限位机构1100包括第一限位件1110、第二限位件1120、第一支撑件1130、第二支撑件114、第一弹簧1150和第二弹簧1160,其中第一支撑件1130和第二支撑件114分别设于存储容器800的相对两侧,且第一支撑件1130、第二支撑件114固定连接在底座1300上。上述第一限位件1110、第二限位件1120位于第一支撑件1130与第二支撑件114之间,且第一限位件1110和第二限位件1120分别设于存储容器800的相对两侧,第一限位件1110、第二限位件1120上相对存储容器800的侧面设有内凹的圆弧面。第一支撑件1130与第一限位件1110之间通过第一弹簧1150连接,第二支撑件114与第二限位件1120之间通过第二弹簧1160连接,第一弹簧1150、第二弹簧1160均为压簧。则本实施中将存储容器800限位在开瓶位置的原理为:用户驱动第一限位件1110背离第二限位件1120运动,第一弹簧1150压缩;然后将存储容器800放置于第一限位件1110和第二限位件1120之间,缓慢释放第一限位件1110,使得第一弹簧1150伸长带动第一限位件1110朝向第二限位件1120运动,从而将存储容器800限位在开瓶位置。
如图5所示,支撑架1310向底座1300上方延伸连接驱动机构1200,该驱动机构1200包括第一电机1210和旋转支撑件1220,第一电机1210为步进电机,该第一电机1210的输出轴竖直向下设置,且旋转支撑件1220与第一电机1210的输出轴连接。如图6所示旋转支撑件1220分别与连接。第一开瓶机构600、第二开瓶机构500、第三开瓶机构900在旋转支撑件1220上,沿第一电机1210的输出轴的轴线1211圆形阵列分布。本实施例中上述开瓶位置位于第一开瓶机构600的正下方,则通过第一电机1210输出轴的转动可带动第一开瓶机构600、第二开瓶机构500、第三开瓶机构900依次运动至开瓶位置的上方,依次使得第一开瓶机构600、第二开瓶机构500、第三开瓶机构900与存储容器800的瓶口810相对。
在本实施例中信号收发模块101可接收控制电路102发出的指令,也可发送反馈信号至控制电路102。电源103对整个智能开瓶器提供电源。指令输入模组104接收用户输入的指令,控制电路102根据用户输入指令执行相应的控制。uvc光源105对瓶口进行灭菌操作,减少瓶口处细菌对食品污染或降低细菌进入人口中。环境光传感器107采集瓶所在环境的光亮度,控制电路102根据环境光亮度控制照明光源106调节亮度照射到瓶上,具体是照射到瓶的带有品牌信息和/或瓶装容量的标签处。图像采集模组108对瓶的标签图像和瓶身图像进行采集,然后通过信号收发模块101发送服务器进行识别存储容器800的种类,在本实施例存储容器800的种类(图像信息)包括瓶盖存在差异的第一种存储容器、第二种存储容器和第三种存储容器。当然也可是图像采集模组108自身带有处理器,可以不依赖网络来识别出标签上的品牌信息和瓶装容量,。采用本发明实施例1中的方法识别出瓶盖类型后,控制电路102通过信号收发模块101发送控制指令控制电机1210驱动第一开瓶机构600、第二开瓶机构500、第三开瓶机构900中的一个工作。具体的处理方式请参见实施例1,在此不再赘述。
实施例4
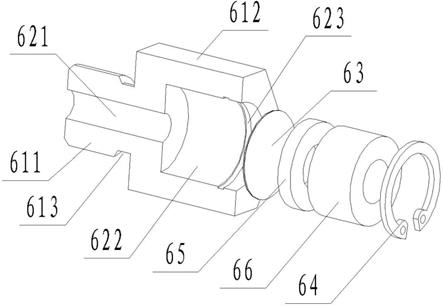
请参见图9至图11,本发明实施例4中的识别不同类型瓶盖的智能开瓶器在实施例1至实施例3的基础上进行进一步改进。具体是本实施例中第一开瓶机构600包括夹持件640和驱动件630,该夹持件640用于夹持位于存储容器800瓶口810的瓶盖,本实施例中瓶盖可为密封在存储容器800瓶口810的瓶盖、位于存储容器800瓶口810内的瓶塞820等。驱动件630驱动夹持件640相对存储容器800瓶口810运动,以将瓶塞820与存储容器800分离,从而实现对存储容器800开瓶。
以本实施例中第一种存储容器为葡萄酒瓶为例说明,则第一种存储容器的开瓶方式是将葡萄酒瓶瓶口内的瓶塞拔出,则第一开瓶机构600用于葡萄酒进行开瓶,葡萄酒瓶的开瓶方式已被本领域技术人员所熟知,在此不作详细说明。第一开瓶机构600还包括外套610、内套620和打孔件650,同时本实施例中夹持件640包括双轴电机631、第一螺旋轴632和第二螺旋轴633,驱动件630包括套筒641、夹持连杆642和夹持抵杆643。上述外套610套设在内套620外部,且外套610与内套620的轴线同轴,在外套610的内壁上设有限位凸起612,在内套620的外壁上设有限位槽624,该限位凸起612卡接于限位槽624内,保证外套610与内套620之间无法相对转动。在内套620的内部固定连接有滑动板623,上述双轴电机631设于内套620的内部,且双轴电机631与滑动板623滑动连接,从而使得双轴电机631可在滑动板623上滑动;该双轴电机631的输出轴的轴线与内套620的轴线平行。
在双轴电机631的其中一个输出轴上同轴固定连接有第一螺旋轴632,在双轴电机631的另一个输出轴上同轴固定连接有第二螺旋轴633和打孔件650,在本实施例中打孔件650为钻头,且在第二螺旋轴633上还同轴套设有套筒641,套筒641与第二螺旋轴633转动连接,第二螺旋轴633上设有轴肩以限位套筒641在第二螺旋轴633上轴向的位置,使得套筒641只能在第二螺旋轴633上转动。第一螺旋轴632上设有第一外螺纹,第二螺旋轴633上设有第二外螺纹,第一外螺纹和第二外螺纹的旋向相反,该第一外螺纹、双轴电机631、第二外螺纹、套筒641、打孔件650从上至下依次设置。
在外套610内部固定设有第一螺旋连接板611,该第一螺旋连接板611上设有螺纹孔,在螺纹孔内设有内螺纹,第一螺旋轴632上的第一外螺纹与第一螺旋连接板611上的螺纹孔螺纹连接。在内套620内部固定设有第二螺旋连接板621,该第二螺旋连接板621上设有螺纹孔,在该螺纹孔内设有内螺纹,第二螺旋轴633上的第二外螺纹与第二螺旋连接板621上的螺纹孔螺纹连接。在内套620内部还设有支撑板622,该支撑板622位于第二螺旋连接板621下方,第二螺旋轴633穿过支撑板622,且套筒641位于支撑板622的下方。上述夹持连杆642的一端转动连接在支撑板622上,夹持连杆642的另一端与夹持抵杆643的一端转动连接,夹持抵杆643的另一端转动连接在套筒641的外壁上,且夹持连杆642与夹持抵杆643之间的夹角为锐角。在本实施例中夹持连杆642和夹持抵杆643为若干个,每个夹持连杆642转动连接一个夹持抵杆643,且若干夹持连杆642沿套筒641的圆周方向均布设置在套筒641外部。
本实施例中第一开瓶机构600的工作原理为:第一开瓶机构600旋转至开瓶位置,第一开瓶机构600内套620的下端抵接在存储容器800的瓶口810上,此时打孔件650与瓶口810内的瓶塞820相对;然后控制模块200控制双轴电机631的输出轴正转从而带动第一螺旋轴632、第二螺旋轴633和打孔件650正转,由于内套620的下端抵接在存储容器800的瓶口810上,则第一螺旋轴632相对第一螺旋连接板611转动,从而带动外套610相对双轴电机631向下运动;第二螺旋轴633相对第二螺旋连接板621转动,从而带动双轴电机631相对内套620向下运动。在双轴电机631相对内套620向下运动的过程中打孔件650转动,同时打孔件650向下运动在瓶塞820上打出抵接孔。同时在双轴电机631相对内套620向下运动的过程中套筒641相对支撑板622向下运动,从而带动夹持连杆642与夹持抵杆643之间的夹角增大。当双轴电机631相对内套620向下运动至第二外螺纹与第二螺旋连接板621分离时,夹持抵杆643的一端与抵接孔的内壁抵接;若干夹持抵杆643的端部抵持在抵接孔的内壁上,若干夹持抵杆643夹持住瓶塞820,从而使得第二螺旋轴633与瓶塞820固定连接,此时外套610的下端也抵接在存储容器800的瓶口810上。
然后,双轴电机631继续正转从而带动第一螺旋轴632、第二螺旋轴633和打孔件650正转,由于第二螺旋轴633上的第二外螺纹与第二螺旋连接板621分离,则第二螺旋轴633转动不在带动双轴电机631相对内套620向下运动。而第一螺旋轴632上的第一外螺纹仍与第一螺旋连接板611螺纹连接,则通过第一螺旋轴632转动可带动双轴电机631相对外套610向上运动(此时外套610的下端抵接在存储容器800的瓶口810上),因此双轴电机631带动第二螺旋轴633及瓶塞820向上运动,从而将瓶塞820从存储容器800的瓶口810中取出。
当瓶塞820从存储容器800的瓶口810中取出后,用户可再按动开瓶信号接收模块按钮,控制模块200控制双轴电机631的输出轴反转从而带动第一螺旋轴632和第二螺旋轴633反转,由于内套620的自重使得内套620有向下运动的力,可使得第二螺旋轴633上第二螺旋螺纹与第二螺旋连接板621再次螺纹连接;第二螺旋螺纹与第二螺旋连接板621螺纹连接,且第二螺旋轴633反转,从而使得双轴电机631相对内套620向上运动。在双轴电机631相对内套620向上运动的过程中套筒641相对支撑板622向上运动,从而带动夹持连杆642与夹持抵杆643之间的夹角减小,使得各夹持抵杆643的一端不在与抵接孔的内壁抵接,最终将瓶塞820与第二螺旋轴633分离。而第一螺旋轴632反转从而带动双轴电机631与外套610恢复初始的状态,以便下次使用。当然,在葡萄酒瓶的瓶口在空气中暴露过久后,会有细菌等吸附于瓶口,则控制uvc光源对瓶口杀菌一定时间,这个时间可以用户自行设定,通常15分钟至30分钟。
在本实施例中第二种存储容器可为玻璃容器,其上有金属瓶盖,如老干妈辣酱瓶,这时,由于需要将瓶盖旋转拧出,在开始时,先控制第二开瓶机构对玻璃容器的瓶口处稍微加热数十秒,然后再控制第二开瓶机构进行旋转拧出。
综上所述,本发明上述实施例可以较好地实现对容器瓶盖的智能开启,降低了瓶盖开启难度,对于家庭尤其是厨房工作人员而言,可以较为便捷地自动开启各种调味料瓶和葡萄酒瓶,而无需其它各种辅助工具,省心、省时、省力。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。