1.本发明涉及卷烟生产自动化智能化技术领域,尤其涉及一种烟梗智能上料控制系统及控制方法。
背景技术:
2.目前在烟草制丝车间,烟梗的上料绝大部分均是通过人工操作完成:装有烟梗的烟梗包由运输车运送至指定区域无规则堆放,利用遥控器对挂钩(目前为三个钩)实现东西方向、上下方向移动。操作工利用遥控器将挂钩移至需开烟梗包处,人工手动将三个钩子分别勾上三袋烟梗包(南北方向的烟梗包需人工拉着钩子移至该处进行勾包)。勾包完成后,操作遥控器将烟梗包移动至与除尘罩等高位置时,操作人员一只手固定烟梗包,另一只手操作切割刀划开烟梗包底部后,附加人工抖动,使烟梗完全落入传送皮带(其他两个烟梗包为同样的操作,但中间有转动挂钩寻找未开烟梗包的过程)。开包完成后,将空烟梗包人工放至规定处。
3.为提升整体自动化程度并实现减员增效,在满足生产工艺要求的前提下,拟通过使用自动化设备、机器人来实现生产的自动化。
技术实现要素:
4.本发明的目的在于提供一种烟梗智能上料控制系统及控制方法,能保证基于移动视觉技术的烟梗智能上料系统动作执行及路径优化。
5.为实现上述目的,本发明采用如下技术方案:
6.一种烟梗智能上料控制系统,包括双轴桁架机器人子控制系统、视觉系统移动子控制系统、烟梗包卸车码垛机构子控制系统、烟梗包破包卸料机构子控制系统、烟梗包上料防尘机构子控制系统、空烟梗包回收桶机构子控制系统及plc主控制系统;
7.所述双轴桁架机器人子控制系统、所述视觉系统移动子控制系统、所述烟梗包卸车码垛机构子控制系统、所述烟梗包破包卸料机构子控制系统、所述烟梗包上料防尘机构子控制系统及所述空烟梗包回收桶机构子控制系统均分别与所述plc主控制系统通讯连接。
8.进一步的,所述双轴桁架机器人子控制系统包括双轴桁架机器人控制器、第一伺服电机控制器、第二伺服电机控制器及接近开关,所述双轴桁架机构人控制器与所述plc主控制器双向通讯连接,所述双轴桁架机器人分别与第一伺服电机控制器、第二伺服电机控制器及接近开关电信号连接。
9.进一步的,所述视觉系统移动子控制系统包括视觉控制器、第一相机、第三伺服电机及触发传感器;所述视觉控制器与所述plc主控制器双向通讯连接,所述第一相机、所述第三伺服电机及所述触发传感器均分别与所述视觉控制器电信号连接。
10.进一步的,所述烟梗包卸车码垛机构子控制系统包括所述视觉控制器、第三伺服电机、第一相机、第一转向电机、第二转向电机、第三转向电机、激光传感器、第一气缸及第
一重量传感器;
11.所述激光传感器及所述第一重量传感器均分别与所述视觉控制器及所述plc主控制器电信号连接;
12.所述第三伺服电机、所述第一相机、所述第一转向电机、所述第二转向电机、所述第三转向电机及所述第一气缸均与所述视觉控制器电信号连接。
13.进一步的,所述烟梗包破包卸料机构子控制系统包括梗包破包卸料控制器、第二气缸、第三气缸、第四气缸、第五气缸、第六气缸、第七气缸及第一电机;
14.所述梗包破包卸料控制器与所述plc主控制器通讯连接,所述第二气缸、所述第三气缸、所述第四气缸、所述第五气缸、所述第六气缸、所述第七气缸及所述第一电机电信号连接。
15.进一步的,所述烟梗包上料防尘机构子控制系统包括上料防尘控制器及第八气缸,所述上料防尘控制器与所述plc主控制器电信号连接,所述第八气缸与所述上料防尘控制器电信号连接。
16.进一步的,所述空烟梗包回收桶机构子控制系统包括回收桶控制器及第九气缸;所述回收桶控制器与所述plc主控制器电信号连接,所述第九气缸与所述回收桶控制器电信号连接。
17.一种烟梗智能上料控制方法,使用上述任一项的烟梗智能上料控制系统,包括以下控制方法:
18.s1、烟梗智能上料系统启动,视觉系统移动子控制系统的视觉控制器控制电磁阀保持通气达到防尘的功能;
19.s2、当运输车依靠在固定位置时,触发传感器将检测到的信号传递给视觉控制器及plc主控制器;
20.所述plc主控制器将控制信号传递给双轴桁架机器人子控制系统,控制双轴桁架机器人的运动轴一进行相应的动作;视觉系统移动子控制系统的视觉控制器控制第三伺服电机在移动轨道上移动,使得第一相机到达指定位置进行拍照检测,然后移动至烟梗包码垛指定位置进行数据采集并记录,并将拍照图片及采集的数据通过视觉控制器传递给plc主控制器;
21.s3、plc主控制器根据视觉系统移动子控制系统采集的数据控制烟梗包卸车码垛机构子控制系统及双轴桁架机器人子控制系统将烟梗包摆放至相应的位置;
22.s4、plc主控制器控制双轴桁架机器人子控制系统及烟梗包破包卸料机构子控制系统完成在烟梗输送机构的烟梗包上料防尘机构内的烟梗包破包及卸料;
23.s5、在步骤s4双桁架机器人子控制系统控制第二伺服电机动作将烟梗包移动至烟梗包上料防尘机构内时,烟梗包上料防尘机构子控制系控制烟梗包上料防尘机构动作,以使得烟梗包破包卸料机构在烟梗包上料防尘机构内完成破包及卸料;
24.s6、当烟梗包破包卸料机构在烟梗包上料防尘机构内完成破包及卸料后,所述plc主控制系统控制空烟梗包回收桶机构子控制系统完成空烟梗包落入空烟梗包回收桶内。
25.本方案中双轴桁架机器人既可以完成从运输车抓包放在指定区域,也可以完成从指定区域抓包、开包到输送带上,可实现整体的自动化;由一套移动视觉系统完成了运输车上的烟梗包定位、摆放区域的烟梗包定位以及火星检测;运动轴二移动至上料防尘机构内
才进行开包,保证烟梗不会洒落。
26.本发明的有益效果是:
27.本技术方案的智能系统完全替代了人工操作,实现了烟梗包从运输车至指定区域、从指定区域至烟梗输送机的移载以及烟梗包的破包卸料、空烟梗包的回收的所有流程,真正实现了烟梗上料的自动化智能化。
附图说明
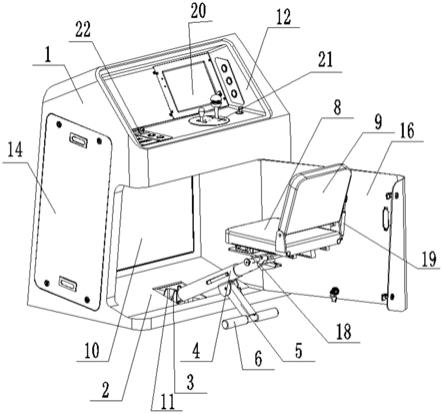
28.图1为烟梗智能上料系统示意图;
29.图2为烟梗智能上料控制方法拓扑图;
30.图3为视觉系统移动子控制系统结构示意图;
31.图4为烟梗包卸车码垛机构子控制系统结构示意图;
32.图5为烟梗包破包卸料机构子控制系统结构示意图;
33.图6为上料防尘机构子控制系统结构示意图;
34.图7为空烟梗包回收桶子控制系统结构示意图。
具体实施方式
35.以下通过实施例对本发明的技术方案进行详细的说明,以下的实施例仅是示例性的,仅能用来解释和说明本发明的技术方案,而不能解释为是对本发明技术方案的限制。
36.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为是对本发明的限制,此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,也可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
38.通过下面具体的实施例并结合附图对本发明的技术方案进一步详细描述。
39.如图1至图7所示,一种烟梗智能上料控制系统,包括双轴桁架机器人子控制系统1、视觉系统移动子控制系统2、烟梗包卸车码垛机构子控制系统3、烟梗包破包卸料机构子控制系统4、烟梗包上料防尘机构子控制系统5、空烟梗包回收桶机构子控制系统6等,各个子控制系统间通过基于移动视觉技术的烟梗智能上料系统plc主控制系统通讯,相互配合动作实现系统功能。
40.所述双轴桁架机器人子控制系统1,双轴桁架机器人有两个运动轴,即运动轴一(包含y轴及z轴)和运动轴二(包含y轴及z轴),运动轴一实现烟梗包卸车码垛的功能,运动轴二实现烟梗包破包卸料的功能;运动轴一和运动轴二共用桁架机器人x轴,设置运动轴一及运动轴二的y轴初始位置为x轴两端,控制伺服电机正反转圈数达到控制运动轴一及运动轴二的y轴在x轴上位置,两个伺服电机(分别为第一伺服电机和第二伺服电机)正反转圈数
设置互锁功能达到防碰撞的功能;同时,运动轴一及运动轴二的y轴上安装接近开关,当两个y轴达到阈值距离时给出信号,控制两个伺服电机停止转动;双重控制下实现桁架机器人双轴防碰撞的功能;双轴桁架机器人在x方向、y方向、z方向的运动距离通过控制伺服电机的转动实现。
41.所述视觉系统移动子控制系统2,移动轨道滑块上安装相机,相机整体安装在根据相机视角设计的防尘机构中,当基于移动视觉技术的烟梗智能上料系统启动时,视觉系统移动子控制系统2控制电磁阀保持通气达到防尘的功能;当运输车停靠固定位置准备卸包时触发信号给视觉系统移动子控制系统2,视觉系统移动子控制系统2控制第三伺服电机8在移动轨道上移动,使得第一相机到达指定位置进行拍照检测;然后移动至烟梗包码垛指定位置进行数据采集并记录,采集指定摆放区域烟梗包摆放情况,包括可摆放的位置及每个位置上的烟梗包数量;运动轴一完成一次码垛后系统将该烟梗包摆放情况修订并保存,便于控制运动轴二的抓取。
42.所述烟梗包卸车码垛机构子控制系统3,根据视觉系统所取得的烟梗包的位置、角度、形状等数据,当运动轴一移动至运输车抓取位置时,根据视觉系统所采集的烟梗包的角度,即烟梗包在三维坐标系中xy/xz/yz平面内的角度,第一转向电机9调整烟梗包卸车码垛机构在xy平面内的角度,第三转向电机12调整烟梗包卸车码垛机构在xz平面内的角度,第二转向电机11调整烟梗包卸车码垛机构在yz平面内的角度;根据位移激光传感器获取的与烟梗包的距离调整双轴桁架机器人运动轴一在z方向的高度;第一气缸14缩回使得夹爪抱夹烟梗包,之后双轴桁架机器人运动轴一提升使得烟梗包离开运输车,第一称重传感器10获取该烟梗包的重量并存储,根据视觉系统获取的指定摆放区域的摆放位置,由双轴桁架机器人运动轴一移动摆放至相应的位置。
43.所述烟梗包破包卸料机构子控制系统4,双轴桁架机器人运动轴二根据数据库所存储的双轴桁架机器人运动轴一所摆放的烟梗包的位置、重量等信息至所要取烟梗包相应的位置,根据位移激光传感器获取的与烟梗包的距离调整双轴桁架机器人运动轴二在z方向的高度,第五气缸19、第七气缸22运动调整四个挂钩的的间距以适应相应烟梗包的尺寸;挂钩翻转勾住烟梗包四个角,第二气缸15缩回使得夹爪抱夹烟梗包,双轴桁架机器人运动轴二提升并移动至烟梗包上料防尘机构内;第六气缸21缩回使得刀片勾住烟梗包,第七气缸22移动划开烟梗包,然后第六气缸21、第七气缸22相继复位;第一气缸15伸出使得夹爪松开,第四气缸18伸出使得烟梗包有足够的翻转空间,第一电机23旋转使得烟梗包整体旋转180
°
,开口朝下,烟梗自动从烟梗包内掉落至上料防尘机构中,同时第三气缸17不停地往复运动捶打烟梗包使得烟梗卸料快速干净,由于烟梗包四个角有挂钩勾住,烟梗掉落干净。
44.所述烟梗包上料防尘机构子控制系统5,当双轴桁架机器人运动轴二夹取烟梗包至机构内时,双轴桁架机器人运动轴二给出信号,烟梗包上料防尘机构子控制系统5控制第八气缸24关闭,烟梗包破包卸料机构在上料防尘机构中执行相应的动作。
45.所述空烟梗包回收桶机构子控制系统6,当当双轴桁架机器人运动轴二完成烟梗包破包卸料的动作后,第三气缸17给出信号,第八气缸24缩回打开上料防尘机构,双轴桁架机器人运动轴二带着空烟梗包移动至空烟梗包回收桶机构上方,下移至固定位置,四个第九气缸25闭合夹住空烟梗包,挂钩复位完成空烟梗包的脱包,之后双轴桁架机器人运动轴二上移,电机旋转复位;四个第九气缸25同时打开使得空烟梗包自动掉落至回收桶内。
46.本发明包括双轴桁架机器人子控制系统1、视觉系统移动子控制系统2、烟梗包卸车码垛机构子控制系统3、烟梗包破包卸料机构子控制系统4、烟梗包上料防尘机构子控制系统5、空烟梗包回收桶机构子控制系统6等。
47.方案整体动作流程:
48.运输车停靠在固定位置,传感器检测到信号,传输给视觉系统移动子控制系统2;
49.第一相机移动至指定位置采集运输车烟梗种类编号信息及车上烟梗包信息,通过视觉算法确定取包顺序,烟梗包卸车码垛机构子控制系统3根据顺序进行烟梗包的取包;
50.双轴桁架机器人的运动轴一根据视觉系统给定顺序取包称重后摆放至指定区域;
51.双轴桁架机器人的运动轴二根据视觉系统给定的烟梗包摆放区域信息移动至对应位置取包,烟梗包破包卸料机构子控制系统4控制完成烟梗包的夹取;
52.双轴桁架机器人的运动轴二再移动至烟梗输送机的上料防尘机构内,烟梗包破包卸料机构子控制系统4进行破包、抖动卸料;
53.双轴桁架机器人的运动轴二最后移动至空烟梗包回收桶固定位置,空烟梗包回收桶机构子控制系统6执行卸空烟梗包动作;
54.(7)重复执行上述动作流程,进行生产。
55.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的发明范围内。本发明要求保护范围由所附的权利要求书及等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。