1.本发明属于偏航系统领域,具体是一种风力发电机组偏航系统故障识别算法。
背景技术:
2.偏航系统是水平轴风电机组的重要系统,该系统的功能是使风轮保持合理的对风角度,提高风能利用率;由于风向变化的不确定性,风电机组的对风误差只能保持一个较小的范围内;只有当风向超过设定的实际和角度时,偏航系统才启动驱动风轮主动偏航寻找最佳对风角度;当系统不偏航时,偏航系统要通过偏航驱动系统和偏航刹车系统将风轮锁定避免风轮随风向变化发生摆动;(该原理类似汽车下坡过程要通过发动机制动和刹车制动同时工作降低车速)
3.为了捕捉更多的风能,风电机组的风轮直径越来越大,扫风面积也越来越大;与此同时,风轮的受力也越来越大,偏航系统的载荷也越来越大;近年来一些大风轮机组的偏航系统不断出现偏航驱动变速箱损坏,偏航齿轮断齿、摩擦片异常磨损等故障;由于这种故障目前没有被提前预警,等运维人员发现机组出现故障进行排查时,偏航系统已经出现严重损坏。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种风力发电机组偏航系统故障识别算法,解决现有具有大风轮机组的偏航系统在发生故障时无法得到提前预警,大致其损坏严重的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:
8.一种风力发电机组偏航系统故障识别算法,包括如下步骤:
9.s1、主控系统实时采集机舱位置信号,风电机组偏航卡钳压力信号,液压站主压力,风电机组机舱位置信号以及风速信号;各个信号采样间隔和风电机组plc采样间隔一致;
10.s2、求偏航卡钳压力和液压站主压力的比值,利用比值数据判断机组此刻处于偏航锁定或是启动阶段的状态;
11.s3、当判读机组处于偏航锁定状态时,此时系统输出偏航制动力不足预警,必要时安排维护或是停机维护;
12.当判读机组处于启动阶段的状态时,此时偏航驱动电机电磁刹车磨损预警,必要时安排维护或是停机维护。
13.进一步的,在所述s1中,
14.采样间隔的时间为:20ms。
15.进一步的,在所述s2中,
16.若是偏航卡钳压力和液压站主压力的比值大于等于0.6时,则说明机组此刻处于偏航锁定状态;
17.若是偏航卡钳压力和液压站主压力的比值小于0.6时,则说明机组处于偏航启动阶段。
18.进一步的,在所述s3中,
19.当判读机组处于偏航锁定状态时,若是此时风电机组机舱位置信号上一个采样点和下一个采样点之差大于0.02
°
,连续超过10个点,且此时风速小于12m/s,
20.此时系统输出偏航制动力不足预警,必要时安排维护。
21.进一步的,在所述s3中,
22.当判读机组处于偏航锁定状态时,若是此时风电机组机舱位置信号上一个采样点和下一个采样点之差大于0.1
°
,连续超过4个点,且此时风速小于12m/s,
23.此时系统输出偏航制动力不足报警,停机维护。
24.进一步的,在所述s3中,
25.当判读机组处于偏航启动状态时,风电机组机舱位置信号上一个采样点和下一个采样点之差大于1
°
,连续超过2个点,风速信号同步风速小于15m/s,
26.偏航驱动电机电磁刹车磨损预警,必要时安排维护。
27.进一步的,在所述s3中,
28.当判读机组处于偏航启动状态时,风电机组机舱位置信号上一个采样点和下一个采样点之差大于2
°
,连续超过2个点,风速信号同步风速小于15m/s,
29.偏航驱动电机电磁刹车磨损报警,需停机维护。
30.(三)有益效果
31.通过本发明风电机组可以自动对偏航系统故障进行识别被并预警,可以对发生的问题在早期进行及时发现,通过维护更换,降低故障损失,同时提高机组运行安全性。
附图说明
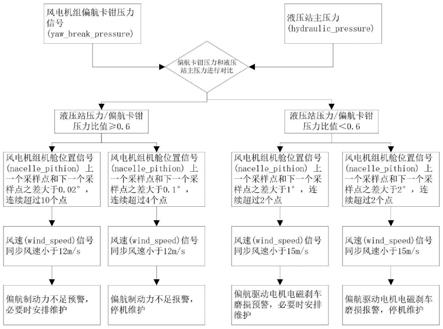
32.图1是本发明的偏航系统预警算法流程图。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。此外,下文为了描述方便,所引用的“上”、“下”、“左”、“右”等于附图本身的上、下、左、右等方向一致,下文中的“第一”、“第二”等为描述上加以区分,并没有其他特殊含义。
34.针对现有技术中存在的问题,本发明提供一种风力发电机组偏航系统故障识别算法,包括如下步骤:
35.s1、主控系统实时采集机舱位置信号,风电机组偏航卡钳压力信号,液压站主压力,风电机组机舱位置信号以及风速信号;各个信号采样间隔和风电机组plc采样间隔一致,本例中取20ms为采样间隔;
36.s2、求偏航卡钳压力和液压站主压力的比值,若是偏航卡钳压力和液压站主压力的比值大于等于0.6时,则说明机组此刻处于偏航锁定状态;
37.若是偏航卡钳压力和液压站主压力的比值小于0.6时,则说明机组处于偏航启动阶段;
38.s3、
39.①
当判读机组处于偏航锁定状态时,如果此时风电机组机舱位置信号上一个采样点和下一个采样点之差大于0.02
°
,连续超过10个点,且此时风速小于12m/s;
40.此时系统输出偏航制动力不足预警,必要时安排维护。
41.②
当判读机组处于偏航锁定状态时,如果此时风电机组机舱位置信号上一个采样点和下一个采样点之差大于0.1
°
,连续超过4个点,且此时风速小于12m/s;
42.此时系统输出偏航制动力不足报警,停机维护。
43.③
当判读机组处于偏航启动状态时,风电机组机舱位置信号上一个采样点和下一个采样点之差大于1
°
,连续超过2个点,风速信号同步风速小于15m/s,
44.偏航驱动电机电磁刹车磨损预警,必要时安排维护。
45.④
当判读机组处于偏航启动状态时,风电机组机舱位置信号上一个采样点和下一个采样点之差大于2
°
,连续超过2个点,风速信号同步风速小于15m/s,
46.偏航驱动电机电磁刹车磨损报警,需停机维护。
47.通过本发明风电机组可以自动对偏航系统故障进行识别被并预警,可以对发生的问题在早期进行及时发现,通过维护更换,降低故障损失,同时提高机组运行安全性。
48.上述算法原理为:
49.在背景技术中介绍,目前风电机组的偏航锁定都是依靠偏航制动器(摩擦片和摩擦盘组成,依靠液压系统提供的压力降摩擦片压紧在制动盘上产生制动力矩)和偏航驱动系统提供的制动力矩共同提供(当偏航系统处于锁定状态时,偏航驱动电机的电磁刹车启动,偏航驱动电机通过偏航减速机驱动小齿轮和驱动偏航齿圈啮合提供制动力矩)。
50.由于偏航制动器摩擦片的产生磨损,油污时摩擦副之间的摩擦系数会降低,该部分提供的制动力矩将会减小,此时减小部分的制动力矩就会传递至偏航啮合齿轮、偏航减速机以及偏航电机;
51.随着偏航制动器制动力矩的不断减小或者外载的增大,偏航驱动齿轮会发生磨损,偏航出现轻微滑移现象;通过大量的失效数据研究发现:偏航出现滑移是偏航系统发生故障的最早征兆,此时运维人员对摩擦片清洗或者更换,会大大降低偏航驱动系统的损坏。
52.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

