1.本发明涉及一种蒎烯领域,尤其涉及一种蒎烯提取原料连翘果实分类提取方法。
背景技术:
2.目前,现有技术中在连翘成熟后,需要将连翘采摘,然后将连翘中的连翘种子和连翘壳分离,其分别具有不同的用途,在收获季节,连翘的水分也会丧失,变得干硬,一部分连翘尖端会张开口,另一部分不会张开口,大量采摘得到的连翘中包含有尖端开口和尖端未开口的两种,尖端开口的较为成熟,其内部的种子也较为成熟,价值更高,未开口的则生长不够成熟,其内部含有的有效成分也较少,未成熟的无效成分较多,但是开口的和未开口的混合在一起,如果直接进行敲碎处理,则不同成熟度的连翘种子和连翘壳会混在一起,直接进行使用,则导致后续提取物的无效成分较多,提取物的杂质较多,若采用人工进行分离,则效率低下,工作繁琐。
3.针对上述问题,我们提出了一种蒎烯提取原料连翘果实分类提取方法。
技术实现要素:
4.为了克服现有技术中在连翘成熟后,需要将连翘采摘,然后将连翘中的连翘种子和连翘壳分离,其分别具有不同的用途,在收获季节,连翘的水分也会丧失,变得干硬,一部分连翘尖端会张开口,另一部分不会张开口,大量采摘得到的连翘中包含有尖端开口和尖端未开口的两种,尖端开口的较为成熟,其内部的种子也较为成熟,价值更高,未开口的则生长不够成熟,其内部含有的有效成分也较少,未成熟的无效成分较多,但是开口的和未开口的混合在一起,如果直接进行敲碎处理,则不同成熟度的连翘种子和连翘壳会混在一起,直接进行使用,则导致后续提取物的无效成分较多,提取物的杂质较多,若采用人工进行分离,则效率低下,工作繁琐的缺点,技术问题为:提供一种蒎烯提取原料连翘果实分类提取方法。
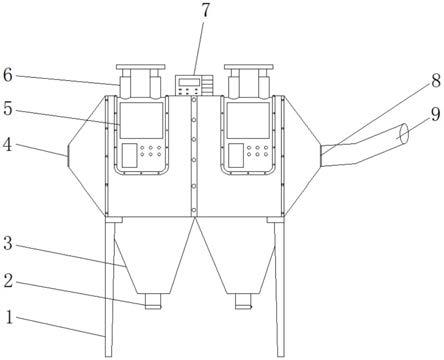
5.一种蒎烯提取原料连翘果实分类提取方法,该蒎烯提取原料连翘果实分类提取方法采用如下加工设备,该加工设备包括有机箱架、支撑脚板、工作承载台、收集槽台、分选系统、分裂系统、下料斜板、运行控制屏、收纳箱和可拆卸阀门板;机箱架下方与支撑脚板进行焊接;机箱架与工作承载台进行焊接;机箱架与收集槽台进行焊接;机箱架内侧安装有分选系统;机箱架内侧安装有分裂系统,并且分裂系统位于分选系统下方;分裂系统下方连接于工作承载台;机箱架与下料斜板进行焊接;工作承载台顶部安装有运行控制屏;工作承载台顶部安装有收纳箱;机箱架与可拆卸阀门板进行螺栓连接;分选系统可将开口的连翘和未开口的连翘分类收集;分裂系统可将开口的连翘向两侧掰开。
6.作为本发明的优选技术方案,分选系统包括有安装集合板、电动升降伸缩柱、底部托板、异形孔位板、第一支撑侧板、第二支撑侧板、第一电动转板、第二电动转板、第一电动滑轨柱、第二电动滑轨柱、滑动长杆、第一阻尼限位滑动座、第二阻尼限位滑动座、第一t型滑动架、第二t型滑动架、第一限位滑动卡块、拨动压线、第二限位滑动卡块和弹性拨动条;
安装集合板与机箱架进行固接;安装集合板顶部安装有电动升降伸缩柱;电动升降伸缩柱顶部安装有底部托板;底部托板上方设置有异形孔位板;异形孔位板与第一支撑侧板进行固接;异形孔位板与第二支撑侧板进行固接;机箱架内侧安装有第一电动转板;机箱架内侧安装有第二电动转板;第一电动滑轨柱与机箱架进行固接;第二电动滑轨柱与机箱架进行固接;滑动长杆一侧与第一电动滑轨柱进行滑动连接,滑动长杆另一侧与第二电动滑轨柱进行滑动连接;滑动长杆底部与第一阻尼限位滑动座进行固接;滑动长杆底部与第二阻尼限位滑动座进行固接;第一t型滑动架与第一阻尼限位滑动座进行滑动连接;第二t型滑动架与第二阻尼限位滑动座进行滑动连接;第一限位滑动卡块与第一t型滑动架进行固接;拨动压线与第一限位滑动卡块进行固接;第二限位滑动卡块与拨动压线进行固接;第二限位滑动卡块与第二t型滑动架进行固接;滑动长杆底部安装有弹性拨动条。
7.作为本发明的优选技术方案,分裂系统包括有轴承座、第一转轴杆、第一传动轮、第一动力电机、第二传动轮、拨动排列机构、下压机构、第一掰分机构和第二掰分机构;轴承座下方与工作承载台进行螺栓连接;轴承座与第一转轴杆进行转动连接;第一转轴杆外表面与第一传动轮进行固接;第一动力电机输出轴与第一转轴杆进行固接;第一动力电机下方与工作承载台进行螺栓连接;第二传动轮外环面通过皮带与第一传动轮进行传动连接;拨动排列机构与第二传动轮进行传动连接;拨动排列机构连接于机箱架内侧;下压机构连接于机箱架内侧;下压机构底部连接有第一掰分机构;下压机构底部连接有第二掰分机构。
8.作为本发明的优选技术方案,还包括有筛分系统,筛分系统包括有底部支撑条、第一弹性伸缩板、筛分格子板、第一弹簧杆座、第二弹簧杆座、第三弹簧杆座、第四弹簧杆座、第二弹性伸缩板、第一振动电机和第二振动电机;底部支撑条与机箱架进行固接;底部支撑条上方与第一弹性伸缩板进行螺栓连接;第一弹性伸缩板上方与筛分格子板进行螺栓连接;第一弹簧杆座安装于筛分格子板;第一弹簧杆座与机箱架进行固接;第二弹簧杆座安装于筛分格子板;第二弹簧杆座与机箱架进行固接;第三弹簧杆座安装于筛分格子板;第三弹簧杆座与机箱架进行固接;第四弹簧杆座安装于筛分格子板;第四弹簧杆座与机箱架进行固接;底部支撑条上方与第二弹性伸缩板进行螺栓连接;第二弹性伸缩板上方与筛分格子板进行螺栓连接;筛分格子板与第一振动电机进行螺栓连接;筛分格子板与第二振动电机进行螺栓连接。
9.作为本发明的优选技术方案,拨动排列机构包括有第一轴承架杆、丝杆、第二轴承架杆、限位滑杆、内螺纹滑动座、限位滑座、第一移动控制杆、动力套盒、第一电动伸缩杆、第一拨动铲板、第二电动伸缩杆、第二拨动铲板、第二移动控制杆和第一平齿轮;第一轴承架杆与机箱架进行固接;丝杆与第一轴承架杆进行转动连接;第二传动轮轴心与丝杆进行固接;第二轴承架杆与机箱架进行固接;第二轴承架杆与丝杆进行转动连接;限位滑杆与第二轴承架杆进行固接;限位滑杆与第一轴承架杆进行固接;内螺纹滑动座内侧与丝杆进行传动连接;限位滑座内侧与限位滑杆进行滑动连接;内螺纹滑动座内侧通过电动滚轮与第一移动控制杆进行传动连接;动力套盒内侧通过电动滚轮与第一移动控制杆进行传动连接;第一电动伸缩杆与第一移动控制杆进行螺栓连接;第一拨动铲板与第一电动伸缩杆进行螺栓连接;第二电动伸缩杆与第一电动伸缩杆进行螺栓连接;第二拨动铲板与第二电动伸缩杆进行螺栓连接;限位滑座内侧通过电动滚轮与第二移动控制杆进行传动连接;第二移动控制杆与第二电动伸缩杆进行螺栓连接;动力套盒与第一平齿轮进行转动连接。
10.作为本发明的优选技术方案,下压机构包括有第二动力电机、电机座板、第二转轴杆、第二平齿轮、第三平齿轮、第三传动轮、第四传动轮、第三转轴杆、第四平齿轮、第一齿杆、第一下压滑动柱、第一阻尼滑套、第五平齿轮、第五传动轮、第二齿杆、第二下压滑动柱、第二阻尼滑套、第六传动轮、第四转轴杆、第六平齿轮、第三齿杆、第三下压滑动柱、第三阻尼滑套、第七平齿轮、第四齿杆、第四下压滑动柱、第四阻尼滑套、第一安装竖板、第一空心匣板、第二安装竖板、第一直角梯形板、第三安装竖板、第二空心匣板、第二直角梯形板、第三直角梯形板、第四安装竖板、第五安装竖板、第三空心匣板、第四直角梯形板、第一三棱叉分柱、第二三棱叉分柱、第三三棱叉分柱、第四三棱叉分柱和第六安装竖板;第二动力电机与电机座板进行螺栓连接;电机座板与机箱架进行螺栓连接;第二动力电机输出轴与第二转轴杆进行固接;第二转轴杆外表面与第二平齿轮进行固接;第二平齿轮斜上方设置有第三平齿轮;第三传动轮轴心与第三平齿轮进行固接;第三传动轮外环面通过皮带与第四传动轮进行传动连接;第三传动轮轴心与机箱架进行转动连接;第三转轴杆外表面与第四传动轮进行固接;第三转轴杆与机箱架进行转动连接;第四平齿轮轴心与第三转轴杆进行固接;第一齿杆与第四平齿轮进行啮合;第一下压滑动柱与第一齿杆进行固接;第一下压滑动柱外表面与第一阻尼滑套进行滑动连接;第一下压滑动柱底部连接于第一掰分机构;第一阻尼滑套与机箱架进行固接;第五平齿轮轴心与第三转轴杆进行固接;第五传动轮轴心与第三转轴杆进行固接;第二齿杆与第五平齿轮进行啮合;第二下压滑动柱与第二齿杆进行固接;第二下压滑动柱外表面与第二阻尼滑套进行滑动连接;第二下压滑动柱底部连接于第一掰分机构;第二阻尼滑套与机箱架进行固接;第六传动轮外环面通过皮带与第五传动轮进行传动连接;第四转轴杆与第六传动轮进行固接;第四转轴杆与机箱架进行转动连接;第六平齿轮轴心与第四转轴杆进行固接;第三齿杆与第六平齿轮进行啮合;第三下压滑动柱与第三齿杆进行固接;第三下压滑动柱底部连接于第二掰分机构;第三下压滑动柱外表面与第三阻尼滑套进行滑动连接;第三阻尼滑套与机箱架进行固接;第七平齿轮轴心与第四转轴杆进行固接;第四齿杆与第七平齿轮进行啮合;第四下压滑动柱与第四齿杆进行固接;第四阻尼滑套与第四下压滑动柱进行滑动连接;第四下压滑动柱底部连接于第二掰分机构;第四阻尼滑套与机箱架进行固接;第一安装竖板与机箱架进行固接;第一空心匣板上方与第一安装竖板进行固接;第一空心匣板上方与第二安装竖板进行固接;第二安装竖板与机箱架进行固接;第一直角梯形板外表面与第一空心匣板进行滑动连接;第一直角梯形板两侧通过电动滑轨与机箱架进行滑动连接;第三安装竖板与机箱架进行固接;第二空心匣板上方与第三安装竖板进行固接;第二直角梯形板外表面与第二空心匣板进行滑动连接;第二直角梯形板两侧通过电动滑轨与机箱架进行滑动连接;第三直角梯形板外表面与第二空心匣板进行滑动连接;第三直角梯形板两侧通过电动滑轨与机箱架进行滑动连接;第四安装竖板与机箱架进行固接;第二空心匣板上方与第四安装竖板进行固接;第五安装竖板与机箱架进行固接;第三空心匣板上方与第五安装竖板进行固接;第四直角梯形板外表面与第三空心匣板进行滑动连接;第四直角梯形板两侧通过电动滑轨与机箱架进行滑动连接;第一三棱叉分柱与机箱架进行固接;第二三棱叉分柱与机箱架进行固接;第三三棱叉分柱与机箱架进行固接;第四三棱叉分柱与机箱架进行固接;第六安装竖板与机箱架进行固接;第六安装竖板下方与第三空心匣板进行固接。
11.作为本发明的优选技术方案,第一掰分机构包括有第一安装轴座板、第一转动连
接座、第二转动连接座、第一掰分钢丝、第二掰分钢丝、第三转动连接座、第四转动连接座和第二安装轴座板;第一安装轴座板上方与第一下压滑动柱进行固接;第一安装轴座板与第一转动连接座进行转动连接;第一安装轴座板与第二转动连接座进行转动连接;第一掰分钢丝与第一转动连接座进行固接;第二掰分钢丝与第二转动连接座进行固接;第三转动连接座与第一掰分钢丝进行固接;第四转动连接座与第二掰分钢丝进行固接;第二安装轴座与第三转动连接座进行转动连接;第二安装轴座与第四转动连接座进行转动连接;第二安装轴座上方与第二下压滑动柱进行固接。
12.作为本发明的优选技术方案,电动升降伸缩柱和底部托板顶部连接处设置有压力传感器。
13.作为本发明的优选技术方案,第一拨动铲板和第二拨动铲板的水平宽度均为丝杆和限位滑杆之间距离的四分之一,并且第一拨动铲板和第二拨动铲板之间存在错位缝隙。
14.作为本发明的优选技术方案,一种蒎烯提取原料连翘果实分类提取方法包括如下步骤:步骤一:加料扫平,人工将收获的连翘从机箱架顶部加入,首先连翘降落在分选系统顶部,然后人工将连翘扫平;步骤二:连翘分类,分选系统将开口的连翘和未开口的连翘分类收集,开口的连翘进入到分裂系统内部;步骤三:掰开破壳,分裂系统将开口的连翘向两侧掰开,掰开的连翘和种子掉落至筛分系统顶部;步骤四:筛分,筛分系统振动分离使得种子从筛分系统下方掉出。
15.本发明的有益效果为:为解决现有技术中在连翘成熟后,需要将连翘采摘,然后将连翘中的连翘种子和连翘壳分离,其分别具有不同的用途,在收获季节,连翘的水分也会丧失,变得干硬,一部分连翘尖端会张开口,另一部分不会张开口,大量采摘得到的连翘中包含有尖端开口和尖端未开口的两种,尖端开口的较为成熟,其内部的种子也较为成熟,价值更高,未开口的则生长不够成熟,其内部含有的有效成分也较少,未成熟的无效成分较多,但是开口的和未开口的混合在一起,如果直接进行敲碎处理,则不同成熟度的连翘种子和连翘壳会混在一起,直接进行使用,则导致后续提取物的无效成分较多,提取物的杂质较多,若采用人工进行分离,则效率低下,工作繁琐的问题;设计了分选系统,分裂系统和筛分系统,在使用时首先连翘降落在分选系统顶部,然后人工将连翘扫平,然后控制分选系统将开口的连翘和未开口的连翘分类收集,未开口的连翘通过下料斜板滑落至收集槽台内部被收集,开口的连翘进入到分裂系统内部,即分裂系统将开口的连翘向两侧掰开,然后掰开的连翘和种子掉落至筛分系统顶部,筛分系统振动分离,进而种子从筛分系统下方掉出,人工使用容器进行收集,连翘壳被拦截在筛分系统顶部,最后处理完成后打开可拆卸阀门板,将筛分系统顶部的连翘壳从机箱架中清理分离;实现了对成熟连翘的分离和提取,将成熟连翘中开口和未开口的两类分开,并自动对开口的连翘进行定位掰分破壳,使其内部的种子分离,最后将连翘壳和种子分离得到连翘种子的效果。
附图说明
16.图1为本发明的第一立体结构示意图;图2为本发明的第二立体结构示意图;图3为本发明的内部立体结构示意图;图4为本发明的分选系统第一立体结构示意图;图5为本发明的分选系统第二立体结构示意图;图6为本发明的分选系统部分立体结构示意图;图7为本发明的分裂系统立体结构示意图;图8为本发明的筛分系统第一立体结构示意图;图9为本发明的筛分系统第二立体结构示意图;图10为本发明的筛分系统前视图;图11为本发明的拨动排列机构立体结构示意图;图12为本发明的下压机构立体结构示意图;图13为本发明的下压机构部分立体结构示意图;图14为本发明的第一掰分机构立体结构示意图。
17.图中零部件名称及序号:1_机箱架,2_支撑脚板,3_工作承载台,4_收集槽台,5_分选系统,6_分裂系统,7_筛分系统,8_下料斜板,9_运行控制屏,10_收纳箱,11_可拆卸阀门板,501_安装集合板,502_电动升降伸缩柱,503_底部托板,504_异形孔位板,505_第一支撑侧板,506_第二支撑侧板,507_第一电动转板,508_第二电动转板,509_第一电动滑轨柱,5010_第二电动滑轨柱,5011_滑动长杆,5012_第一阻尼限位滑动座,5013_第二阻尼限位滑动座,5014_第一t型滑动架,5015_第二t型滑动架,5016_第一限位滑动卡块,5017_拨动压线,5018_第二限位滑动卡块,5019_弹性拨动条,601_轴承座,602_第一转轴杆,603_第一传动轮,604_第一动力电机,605_第二传动轮,606_拨动排列机构,607_下压机构,608_第一掰分机构,609_第二掰分机构,701_底部支撑条,702_第一弹性伸缩板,703_筛分格子板,704_第一弹簧杆座,705_第二弹簧杆座,706_第三弹簧杆座,707_第四弹簧杆座,708_第二弹性伸缩板,709_第一振动电机,7010_第二振动电机,60601_第一轴承架杆,60602_丝杆,60603_第二轴承架杆,60604_限位滑杆,60605_内螺纹滑动座,60606_限位滑座,60607_第一移动控制杆,60608_动力套盒,60609_第一电动伸缩杆,60610_第一拨动铲板,60611_第二电动伸缩杆,60612_第二拨动铲板,60613_第二移动控制杆,60614_第一平齿轮,60701_第二动力电机,60702_电机座板,60703_第二转轴杆,60704_第二平齿轮,60705_第三平齿轮,60706_第三传动轮,60707_第四传动轮,60708_第三转轴杆,60709_第四平齿轮,60710_第一齿杆,60711_第一下压滑动柱,60712_第一阻尼滑套,60713_第五平齿轮,60714_第五传动轮,60715_第二齿杆,60716_第二下压滑动柱,60717_第二阻尼滑套,60718_第六传动轮,60719_第四转轴杆,60720_第六平齿轮,60721_第三齿杆,60722_第三下压滑动柱,60723_第三阻尼滑套,60724_第七平齿轮,60725_第四齿杆,60726_第四下压滑动柱,60727_第四阻尼滑套,60728_第一安装竖板,60729_第一空心匣板,60730_第二安装竖板,60731_第一直角梯形板,60732_第三安装竖板,60733_第二空心匣板,60734_第二直角梯形板,60735_第三直角梯形板,60736_第四安装竖板,60737_第五安装竖板,60738_第三空心匣板,60739_第四直角梯形板,60740_第一三棱叉分柱,60741_第二三棱叉分柱,60742_第
三三棱叉分柱,60743_第四三棱叉分柱,60744_第六安装竖板,60801_第一安装轴座板,60802_第一转动连接座,60803_第二转动连接座,60804_第一掰分钢丝,60805_第二掰分钢丝,60806_第三转动连接座,60807_第四转动连接座,60808_第二安装轴座板。
具体实施方式
18.下面结合附图详细说明本发明的优选技术方案。
19.实施例一种蒎烯提取原料连翘果实分类提取方法,如图1
‑
3所示,该蒎烯提取原料连翘果实分类提取方法采用如下加工设备,该加工设备包括有机箱架1、支撑脚板2、工作承载台3、收集槽台4、分选系统5、分裂系统6、下料斜板8、运行控制屏9、收纳箱10和可拆卸阀门板11;机箱架1下方与支撑脚板2进行焊接;机箱架1与工作承载台3进行焊接;机箱架1与收集槽台4进行焊接;机箱架1内侧安装有分选系统5;机箱架1内侧安装有分裂系统6,并且分裂系统6位于分选系统5下方;分裂系统6下方连接于工作承载台3;机箱架1与下料斜板8进行焊接;工作承载台3顶部安装有运行控制屏9;工作承载台3顶部安装有收纳箱10;机箱架1与可拆卸阀门板11进行螺栓连接;分选系统5可将开口的连翘和未开口的连翘分类收集;分裂系统6可将开口的连翘向两侧掰开。
20.在使用蒎烯提取原料连翘果实分类提取方法的设备时,首先将此设备固定至工作平面,然后外接电源,打开运行控制屏9来看控制设备进行运行,人工将收获的连翘从机箱架1顶部加入,首先连翘降落在分选系统5顶部,然后人工将连翘扫平,然后控制分选系统5将开口的连翘和未开口的连翘分类收集,未开口的连翘通过下料斜板8滑落至收集槽台4内部被收集,开口的连翘进入到分裂系统6内部,即分裂系统6将开口的连翘向两侧掰开,然后掰开的连翘和种子掉落至筛分系统7顶部,筛分系统7振动分离,进而种子从筛分系统7下方掉出,人工使用容器进行收集,连翘壳被拦截在筛分系统7顶部,最后处理完成后打开可拆卸阀门板11,将筛分系统7顶部的连翘壳从机箱架1中清理分离,实现了对成熟连翘的分离和提取,将成熟连翘中开口和未开口的两类分开,并自动对开口的连翘进行定位掰分破壳,使其内部的种子分离,最后将连翘壳和种子分离得到连翘种子的效果。
21.如图4
‑
6所示,分选系统5包括有安装集合板501、电动升降伸缩柱502、底部托板503、异形孔位板504、第一支撑侧板505、第二支撑侧板506、第一电动转板507、第二电动转板508、第一电动滑轨柱509、第二电动滑轨柱5010、滑动长杆5011、第一阻尼限位滑动座5012、第二阻尼限位滑动座5013、第一t型滑动架5014、第二t型滑动架5015、第一限位滑动卡块5016、拨动压线5017、第二限位滑动卡块5018和弹性拨动条5019;安装集合板501与机箱架1进行固接;安装集合板501顶部安装有电动升降伸缩柱502;电动升降伸缩柱502顶部安装有底部托板503;底部托板503上方设置有异形孔位板504;异形孔位板504与第一支撑侧板505进行固接;异形孔位板504与第二支撑侧板506进行固接;机箱架1内侧安装有第一电动转板507;机箱架1内侧安装有第二电动转板508;第一电动滑轨柱509与机箱架1进行固接;第二电动滑轨柱5010与机箱架1进行固接;滑动长杆5011一侧与第一电动滑轨柱509进行滑动连接,滑动长杆5011另一侧与第二电动滑轨柱5010进行滑动连接;滑动长杆5011底部与第一阻尼限位滑动座5012进行固接;滑动长杆5011底部与第二阻尼限位滑动座5013进行固接;第一t型滑动架5014与第一阻尼限位滑动座5012进行滑动连接;第二t型滑动架
5015与第二阻尼限位滑动座5013进行滑动连接;第一限位滑动卡块5016与第一t型滑动架5014进行固接;拨动压线5017与第一限位滑动卡块5016进行固接;第二限位滑动卡块5018与拨动压线5017进行固接;第二限位滑动卡块5018与第二t型滑动架5015进行固接;滑动长杆5011底部安装有弹性拨动条5019。
22.首先人工将收获的连翘从机箱架1顶部加入,首先连翘降落在异形孔位板504顶部,然后人工将连翘扫平,异形孔位板504的孔位与连翘的最大轮廓线相匹配,人工将连翘扫平后使异形孔位板504的异形孔洞被连翘填满,然后此时连翘上半部分表面裸露在异形孔位板504上侧,而连翘的底部接触到底部托板503顶部,此时控制第一电动滑轨柱509好第二电动滑轨柱5010带动滑动长杆5011进行运动,即滑动长杆5011带动其下方连接的部件整体向另一侧运动,此时拨动压线5017从连翘的柄部分向连翘开口的方向运动,进而此时拨动压线5017只是从连翘顶部表面摩擦掠过,待滑动长杆5011运动至第一电动滑轨柱509和第二电动滑轨柱5010一侧末端后,此时第一t型滑动架5014和第二t型滑动架5015首先接触到机箱架1的内壁,然后第一t型滑动架5014和第二t型滑动架5015分别在第一阻尼限位滑动座5012和第二阻尼限位滑动座5013内侧滑动,进而第一t型滑动架5014和第二t型滑动架5015分别通过第一限位滑动卡块5016和第二限位滑动卡块5018带动拨动压线5017向相反方向运动,即拨动压线5017由弹性拨动条5019的一侧从其下方穿过运动至弹性拨动条5019另一侧,然后再控制第一电动滑轨柱509和第二电动滑轨柱5010带动滑动长杆5011反向运动,并且弹性拨动条5019的长度大于滑动长杆5011到异形孔位板504的高度,所以弹性拨动条5019长期处于末端弯曲并部分贴合下异形孔位板504的状态,当滑动长杆5011移动时,弹性拨动条5019末端的朝向与滑动长杆5011运动方向相反,当滑动长杆5011运动到边界,滑动长杆5011开始反向运动后,刷毛末端会先停留在原地然后随着滑动长杆5011的反向运动而一百八十度调转方向,即,使刷毛的末端朝向永远与滑动长杆5011相反,同时每当滑动长杆5011运动到边界时,拨动压线5017由弹性拨动条5019的一侧从其下方穿过运动至弹性拨动条5019另一侧,使得弹性拨动条5019与拨动压线5017的相对位置关系是弹性拨动条5019永远处于拨动压线5017在运动方向上的后方,进而当滑动长杆5011反向运动时,此时拨动压线5017运动方向是由连翘开口的位置向连翘柄的方向,进而此时当拨动压线5017在连翘上表面摩擦掠过时,当拨动压线5017遇到开口的连翘时,此时拨动压线5017会将连翘从异形孔位板504中拨动出来,然后拨动压线5017后侧的弹性拨动条5019会将此类开口的连翘推动至第二电动转板508顶部,然后控制第二电动转板508向下转动打开,进而开口的连翘沿着第二支撑侧板506掉落至分裂系统6中,然后当滑动长杆5011再次运动到初始位置时,此时开口的连翘被完全从异形孔位板504中拨动分离,此时控制四个电动升降伸缩柱502向上推动,即电动升降伸缩柱502带动底部托板503向上运动,进而底部托板503将其顶部的未开口的连翘向上顶,即未开口的连翘从异形孔位板504的孔中向上运动,即连翘的柄向上运动离开异形孔位板504的孔位,连翘柄与异形孔位板504形成一个空隙,再次控制第一电动滑轨柱509和第二电动滑轨柱5010带动滑动长杆5011反向运动,此时拨动压线5017运动经过时,拨动压线5017会进入到连翘柄与异形孔位板504形成的一个空隙中,然后拨动压线5017继续运动,进而通过连翘柄将未开口的连翘从异形孔位板504中拨动分离出来,同样弹性拨动条5019会将此类未开口的连翘推动至第一电动转板507顶部,然后控制第一电动转板507向下转动打开,即未开口的连翘通过下料斜板8滑动至收集槽台4内部被收集,由此完
成开口和未开口的连翘的分离。
23.如图7所示,分裂系统6包括有轴承座601、第一转轴杆602、第一传动轮603、第一动力电机604、第二传动轮605、拨动排列机构606、下压机构607、第一掰分机构608和第二掰分机构609;轴承座601下方与工作承载台3进行螺栓连接;轴承座601与第一转轴杆602进行转动连接;第一转轴杆602外表面与第一传动轮603进行固接;第一动力电机604输出轴与第一转轴杆602进行固接;第一动力电机604下方与工作承载台3进行螺栓连接;第二传动轮605外环面通过皮带与第一传动轮603进行传动连接;拨动排列机构606与第二传动轮605进行传动连接;拨动排列机构606连接于机箱架1内侧;下压机构607连接于机箱架1内侧;下压机构607底部连接有第一掰分机构608;下压机构607底部连接有第二掰分机构609。
24.开口的连翘从分选系统5掉落至下压机构607,然后控制接通第一动力电机604电源,第一动力电机604带动第一转轴杆602进行转动,然后第一转轴杆602带动第一传动轮603进行转动,进而第一传动轮603带动第二传动轮605进行转动,第二传动轮605带动拨动排列机构606进行运转,进而拨动排列机构606将连翘分散到下压机构607内部,然后拨动排列机构606配合下压机构607进行运转,下压机构607将连翘壳分开,连翘壳和连翘种子掉落至筛分系统7内部,完成了开口连翘的掰开破壳。
25.如图8
‑
10所示,还包括有筛分系统7,筛分系统7包括有底部支撑条701、第一弹性伸缩板702、筛分格子板703、第一弹簧杆座704、第二弹簧杆座705、第三弹簧杆座706、第四弹簧杆座707、第二弹性伸缩板708、第一振动电机709和第二振动电机7010;底部支撑条701与机箱架1进行固接;底部支撑条701上方与第一弹性伸缩板702进行螺栓连接;第一弹性伸缩板702上方与筛分格子板703进行螺栓连接;第一弹簧杆座704安装于筛分格子板703;第一弹簧杆座704与机箱架1进行固接;第二弹簧杆座705安装于筛分格子板703;第二弹簧杆座705与机箱架1进行固接;第三弹簧杆座706安装于筛分格子板703;第三弹簧杆座706与机箱架1进行固接;第四弹簧杆座707安装于筛分格子板703;第四弹簧杆座707与机箱架1进行固接;底部支撑条701上方与第二弹性伸缩板708进行螺栓连接;第二弹性伸缩板708上方与筛分格子板703进行螺栓连接;筛分格子板703与第一振动电机709进行螺栓连接;筛分格子板703与第二振动电机7010进行螺栓连接。
26.首先掰开的连翘壳和种子掉落至筛分格子板703顶部,然后控制接通第一振动电机709和第二振动电机7010电源,即第一振动电机709和第二振动电机7010带动筛分格子板703进行振动,此时筛分格子板703上下振动带动第一弹性伸缩板702和第二弹性伸缩板708进行实时伸缩复位,水平方向筛分格子板703则在第一弹簧杆座704、第二弹簧杆座705、第三弹簧杆座706和第四弹簧杆座707表面运动并带动其弹簧压缩,使筛分格子板703水平方向也可复位,然后筛分格子板703振动带动其顶部的连翘振动,然后分成两半的连翘壳振动,其内部的种子掉落出来,从筛分格子板703的缝隙中向下掉落,掉落进入事先准备好的容器进行收集。
27.如图11所示,拨动排列机构606包括有第一轴承架杆60601、丝杆60602、第二轴承架杆60603、限位滑杆60604、内螺纹滑动座60605、限位滑座60606、第一移动控制杆60607、动力套盒60608、第一电动伸缩杆60609、第一拨动铲板60610、第二电动伸缩杆60611、第二拨动铲板60612、第二移动控制杆60613和第一平齿轮60614;第一轴承架杆60601与机箱架1进行固接;丝杆60602与第一轴承架杆60601进行转动连接;第二传动轮605轴心与丝杆
60602进行固接;第二轴承架杆60603与机箱架1进行固接;第二轴承架杆60603与丝杆60602进行转动连接;限位滑杆60604与第二轴承架杆60603进行固接;限位滑杆60604与第一轴承架杆60601进行固接;内螺纹滑动座60605内侧与丝杆60602进行传动连接;限位滑座60606内侧与限位滑杆60604进行滑动连接;内螺纹滑动座60605内侧通过电动滚轮与第一移动控制杆60607进行传动连接;动力套盒60608内侧通过电动滚轮与第一移动控制杆60607进行传动连接;第一电动伸缩杆60609与第一移动控制杆60607进行螺栓连接;第一拨动铲板60610与第一电动伸缩杆60609进行螺栓连接;第二电动伸缩杆60611与第一电动伸缩杆60609进行螺栓连接;第二拨动铲板60612与第二电动伸缩杆60611进行螺栓连接;限位滑座60606内侧通过电动滚轮与第二移动控制杆60613进行传动连接;第二移动控制杆60613与第二电动伸缩杆60611进行螺栓连接;动力套盒60608与第一平齿轮60614进行转动连接。
28.首先开口的连翘从分选系统5掉落至下压机构607,然后控制传动实现第二传动轮605带动拨动排列机构606进行运转,即此时第二传动轮605带动丝杆60602进行转动,然后丝杆60602转动带动内螺纹滑动座60605进行运动,进而内螺纹滑动座60605带动限位滑座60606、第一移动控制杆60607、动力套盒60608、第一电动伸缩杆60609、第一拨动铲板60610、第二电动伸缩杆60611、第二拨动铲板60612、第二移动控制杆60613和第一平齿轮60614进行同步运动,即限位滑座60606在限位滑杆60604表面进行滑动,即第一拨动铲板60610和第二拨动铲板60612进行运动,将掉落到下压机构607的连翘分散开来。
29.如图12
‑
13所示,下压机构607包括有第二动力电机60701、电机座板60702、第二转轴杆60703、第二平齿轮60704、第三平齿轮60705、第三传动轮60706、第四传动轮60707、第三转轴杆60708、第四平齿轮60709、第一齿杆60710、第一下压滑动柱60711、第一阻尼滑套60712、第五平齿轮60713、第五传动轮60714、第二齿杆60715、第二下压滑动柱60716、第二阻尼滑套60717、第六传动轮60718、第四转轴杆60719、第六平齿轮60720、第三齿杆60721、第三下压滑动柱60722、第三阻尼滑套60723、第七平齿轮60724、第四齿杆60725、第四下压滑动柱60726、第四阻尼滑套60727、第一安装竖板60728、第一空心匣板60729、第二安装竖板60730、第一直角梯形板60731、第三安装竖板60732、第二空心匣板60733、第二直角梯形板60734、第三直角梯形板60735、第四安装竖板60736、第五安装竖板60737、第三空心匣板60738、第四直角梯形板60739、第一三棱叉分柱60740、第二三棱叉分柱60741、第三三棱叉分柱60742、第四三棱叉分柱60743和第六安装竖板60744;第二动力电机60701与电机座板60702进行螺栓连接;电机座板60702与机箱架1进行螺栓连接;第二动力电机60701输出轴与第二转轴杆60703进行固接;第二转轴杆60703外表面与第二平齿轮60704进行固接;第二平齿轮60704斜上方设置有第三平齿轮60705;第三传动轮60706轴心与第三平齿轮60705进行固接;第三传动轮60706外环面通过皮带与第四传动轮60707进行传动连接;第三传动轮60706轴心与机箱架1进行转动连接;第三转轴杆60708外表面与第四传动轮60707进行固接;第三转轴杆60708与机箱架1进行转动连接;第四平齿轮60709轴心与第三转轴杆60708进行固接;第一齿杆60710与第四平齿轮60709进行啮合;第一下压滑动柱60711与第一齿杆60710进行固接;第一下压滑动柱60711外表面与第一阻尼滑套60712进行滑动连接;第一下压滑动柱60711底部连接于第一掰分机构608;第一阻尼滑套60712与机箱架1进行固接;第五平齿轮60713轴心与第三转轴杆60708进行固接;第五传动轮60714轴心与第三转轴杆60708进行固接;第二齿杆60715与第五平齿轮60713进行啮合;第二下压滑动柱60716与第
二齿杆60715进行固接;第二下压滑动柱60716外表面与第二阻尼滑套60717进行滑动连接;第二下压滑动柱60716底部连接于第一掰分机构608;第二阻尼滑套60717与机箱架1进行固接;第六传动轮60718外环面通过皮带与第五传动轮60714进行传动连接;第四转轴杆60719与第六传动轮60718进行固接;第四转轴杆60719与机箱架1进行转动连接;第六平齿轮60720轴心与第四转轴杆60719进行固接;第三齿杆60721与第六平齿轮60720进行啮合;第三下压滑动柱60722与第三齿杆60721进行固接;第三下压滑动柱60722底部连接于第二掰分机构609;第三下压滑动柱60722外表面与第三阻尼滑套60723进行滑动连接;第三阻尼滑套60723与机箱架1进行固接;第七平齿轮60724轴心与第四转轴杆60719进行固接;第四齿杆60725与第七平齿轮60724进行啮合;第四下压滑动柱60726与第四齿杆60725进行固接;第四阻尼滑套60727与第四下压滑动柱60726进行滑动连接;第四下压滑动柱60726底部连接于第二掰分机构609;第四阻尼滑套60727与机箱架1进行固接;第一安装竖板60728与机箱架1进行固接;第一空心匣板60729上方与第一安装竖板60728进行固接;第一空心匣板60729上方与第二安装竖板60730进行固接;第二安装竖板60730与机箱架1进行固接;第一直角梯形板60731外表面与第一空心匣板60729进行滑动连接;第一直角梯形板60731两侧通过电动滑轨与机箱架1进行滑动连接;第三安装竖板60732与机箱架1进行固接;第二空心匣板60733上方与第三安装竖板60732进行固接;第二直角梯形板60734外表面与第二空心匣板60733进行滑动连接;第二直角梯形板60734两侧通过电动滑轨与机箱架1进行滑动连接;第三直角梯形板60735外表面与第二空心匣板60733进行滑动连接;第三直角梯形板60735两侧通过电动滑轨与机箱架1进行滑动连接;第四安装竖板60736与机箱架1进行固接;第二空心匣板60733上方与第四安装竖板60736进行固接;第五安装竖板60737与机箱架1进行固接;第三空心匣板60738上方与第五安装竖板60737进行固接;第四直角梯形板60739外表面与第三空心匣板60738进行滑动连接;第四直角梯形板60739两侧通过电动滑轨与机箱架1进行滑动连接;第一三棱叉分柱60740与机箱架1进行固接;第二三棱叉分柱60741与机箱架1进行固接;第三三棱叉分柱60742与机箱架1进行固接;第四三棱叉分柱60743与机箱架1进行固接;第六安装竖板60744与机箱架1进行固接;第六安装竖板60744下方与第三空心匣板60738进行固接。
30.首先开口的连翘从分选系统5掉落至下压机构607,即此时开口的连翘掉落至第一空心匣板60729顶部,然后此时控制拨动排列机构606进行运转,实现第一拨动铲板60610和第二拨动铲板60612进行运动,初始阶段第一拨动铲板60610和第二拨动铲板60612位于中间位置,进而第一拨动铲板60610和第二拨动铲板60612运动过程中首先将中间位置的连翘拨动至第一空心匣板60729和第二空心匣板60733中间的缝隙中,即第一直角梯形板60731和第二直角梯形板60734中部形成的三角凹槽中,然后第一拨动铲板60610和第二拨动铲板60612又继续运动将多余的连翘从第二空心匣板60733顶部拨动至第三直角梯形板60735和第四直角梯形板60739中部的三角凹槽中,然后控制第一动力电机604反向转动,进而第一拨动铲板60610和第二拨动铲板60612复位至初始位置,然后控制第一电动伸缩杆60609和第二电动伸缩杆60611同时伸长,并控制内螺纹滑动座60605和限位滑座60606通过其内侧的电动滚轮分别带动第一移动控制杆60607和第二移动控制杆60613向两侧运动,进而第一电动伸缩杆60609和第二电动伸缩杆60611中部连接位置不动,第一电动伸缩杆60609和第二电动伸缩杆60611外侧向两侧延伸,进而第一电动伸缩杆60609和第二电动伸缩杆60611
分别带动第一拨动铲板60610和第二拨动铲板60612向两侧运动,即第一拨动铲板60610和第二拨动铲板60612运动分别运动至两侧未扫过的位置,同时控制动力套盒60608内部滚轮带动其在第一移动控制杆60607外表面进行运动,即动力套盒60608带动第一平齿轮60614进行反向移动,保持第一平齿轮60614在机箱架1内的位置不变,然后再次控制第一动力电机604转动实现第一拨动铲板60610和第二拨动铲板60612的运动,将第一空心匣板60729两侧位置的连翘再次拨动分散至第一直角梯形板60731与第二直角梯形板60734之间的位置和第三直角梯形板60735与第四直角梯形板60739之间的位置,进而将掉落到第一空心匣板60729的连翘分散开来,此次控制带动内螺纹滑动座60605和限位滑座60606的移动距离大于第一次移动的距离,使得第一平齿轮60614运动至与第二平齿轮60704和第三平齿轮60705同时啮合的位置,然后控制接通第二动力电机60701电源,即第二动力电机60701带动第二转轴杆60703和第二平齿轮60704进行转动,然后第二平齿轮60704带动第一平齿轮60614进行转动,进而第一平齿轮60614带动第三平齿轮60705进行转动,然后第三平齿轮60705带动第三传动轮60706进行转动,进而第三传动轮60706带动第四传动轮60707进行转动,然后第四传动轮60707带动第三转轴杆60708进行转动,第三转轴杆60708带动第四平齿轮60709、第五平齿轮60713和第五传动轮60714进行转动,第五传动轮60714带动第六传动轮60718进行转动,然后第六传动轮60718带动第四转轴杆60719进行转动,第四转轴杆60719带动第六平齿轮60720和第七平齿轮60724进行转动,然后第四平齿轮60709、第五平齿轮60713、第六平齿轮60720和第七平齿轮60724分别带动第一齿杆60710、第二齿杆60715、第三齿杆60721和第四齿杆60725向下运动,即第一齿杆60710、第二齿杆60715、第三齿杆60721和第四齿杆60725分别带动第一下压滑动柱60711、第二下压滑动柱60716、第三下压滑动柱60722和第四下压滑动柱60726向下运动,即第一下压滑动柱60711、第二下压滑动柱60716、第三下压滑动柱60722和第四下压滑动柱60726分别在第一阻尼滑套60712、第二阻尼滑套60717、第三阻尼滑套60723和第四阻尼滑套60727内侧向下滑动,进而第一下压滑动柱60711和第二下压滑动柱60716带动第一掰分机构608向下运动,而第三下压滑动柱60722和第四下压滑动柱60726则带动第二掰分机构609向下运动,同时控制机箱架1内侧相应的电动滑轨带动第一直角梯形板60731和第二直角梯形板60734分别在第一空心匣板60729和第二空心匣板60733内侧滑动相互远离,第三直角梯形板60735和第四直角梯形板60739也分别在第二空心匣板60733和第三空心匣板60738内侧滑动相互远离,此时第一直角梯形板60731与第二直角梯形板60734尖端之间的距离和第三直角梯形板60735和第四直角梯形板60739尖端之间的距离大小为连翘最大直径的百分之九十,进而此时连翘的中部直径最大位置被卡在缝隙中,同时由于连翘一侧有柄重力较大,进而连翘的柄会自动转动朝下,即连翘自动转动调整为开口朝上的状态,然后第一掰分机构608和第二掰分机构609将开口朝上的连翘掰开,掰开后,连翘分为两半,从第一直角梯形板60731与第二直角梯形板60734尖端之间的缝隙和第三直角梯形板60735和第四直角梯形板60739尖端之间的缝隙向下掉落至筛分系统7中。
31.如图14所示,第一掰分机构608包括有第一安装轴座板60801、第一转动连接座60802、第二转动连接座60803、第一掰分钢丝60804、第二掰分钢丝60805、第三转动连接座60806、第四转动连接座60807和第二安装轴座板60808;第一安装轴座板60801上方与第一下压滑动柱60711进行固接;第一安装轴座板60801与第一转动连接座60802进行转动连接;
第一安装轴座板60801与第二转动连接座60803进行转动连接;第一掰分钢丝60804与第一转动连接座60802进行固接;第二掰分钢丝60805与第二转动连接座60803进行固接;第三转动连接座60806与第一掰分钢丝60804进行固接;第四转动连接座60807与第二掰分钢丝60805进行固接;第二安装轴座与第三转动连接座60806进行转动连接;第二安装轴座与第四转动连接座60807进行转动连接;第二安装轴座上方与第二下压滑动柱60716进行固接。
32.此时第一下压滑动柱60711和第二下压滑动柱60716分别带动第一安装轴座板60801和第二安装轴座向下运动,进而第一安装轴座板60801和第二安装轴座同步带动第一转动连接座60802、第二转动连接座60803、第一掰分钢丝60804、第二掰分钢丝60805、第三转动连接座60806和第四转动连接座60807向下同步运动,而此时第一掰分钢丝60804和第二掰分钢丝60805位于第三直角梯形板60735和第四直角梯形板60739尖端之间的缝隙正上方,此时缝隙中连翘开口朝上,然后第一掰分钢丝60804和第二掰分钢丝60805向下运动进入到连翘开口内侧,然后继续运动,第一转动连接座60802和第二转动连接座60803底部中缝接触到第一三棱叉分柱60740,第三转动连接座60806和第四转动连接座60807底部中缝接触到第二三棱叉分柱60741,然后继续运动,则第一三棱叉分柱60740和第二三棱叉分柱60741保持不动,则第一转动连接座60802和第二转动连接座60803向两侧转动分开,而第三转动连接座60806和第四转动连接座60807也向两侧转动分开,进而带动第一掰分钢丝60804和第二掰分钢丝60805向两侧分开,而此时第一掰分钢丝60804和第二掰分钢丝60805均位于连翘开口内侧,进而将连翘两侧掰开分离。
33.电动升降伸缩柱502和底部托板503顶部连接处设置有压力传感器。
34.以便于当拨动压线5017掠过未开口的连翘顶部时,此时拨动压线5017压迫连翘向下移动的时候,触发压力传感器,接受到传感器信号的电动升降伸缩柱502开始主动收缩,收缩的速度能够使传感器感应的压力变为零,进而使未开口的连翘下降,防止未开口的连翘被摩擦拨动。
35.第一拨动铲板60610和第二拨动铲板60612的水平宽度均为丝杆60602和限位滑杆60604之间距离的四分之一,并且第一拨动铲板60610和第二拨动铲板60612之间存在错位缝隙。
36.以便于第一拨动铲板60610和第二拨动铲板60612推动大量连翘时,部分多余的连翘可以从第一拨动铲板60610和第二拨动铲板60612两侧漏出,保证每次定量拨动,多余的自动从两侧漏出,同时多余的连翘还可通过第一拨动铲板60610和第二拨动铲板60612之间的错位缝隙漏出。
37.一种蒎烯提取原料连翘果实分类提取方法包括如下步骤:步骤一:加料扫平,人工将收获的连翘从机箱架1顶部加入,首先连翘降落在分选系统5顶部,然后人工将连翘扫平;步骤二:连翘分类,分选系统5将开口的连翘和未开口的连翘分类收集,开口的连翘进入到分裂系统6内部;步骤三:掰开破壳,分裂系统6将开口的连翘向两侧掰开,掰开的连翘和种子掉落至筛分系统7顶部;步骤四:筛分,筛分系统7振动分离使得种子从筛分系统7下方掉出。
38.尽管已经仅相对于有限数量的实施方式描述了本公开,但是受益于本公开的本领
域技术人员将理解,在不脱离本发明的范围的情况下,可以设计各种其他实施方式。因此,本发明的范围应仅由所附权利要求限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。