1.本发明涉及塑料安瓿质检技术领域,特别涉及一种塑料安瓿外观异物自动检测系统。
背景技术:
2.塑料安瓿瓶是由pp、pe材质的小容量瓶体,通常由多个腔体连接在一起组成一组。在塑料安瓿吹灌封、裁剪、灭菌的过程中可能会造成瓶体破损、瓶体划伤、瓶内异物、灌装不足等缺陷,因此需要对塑料安瓿瓶的外观进行检查。
3.目前塑料安瓿瓶的检查大多依赖人工完成,人工灯检工人劳动强度大,检查效率有限,工人长时间曝光于强光之下,眼睛受到损伤,影响身体健康。目前市场上存在多种口服液、玻璃安瓿自动灯检设备,采用砖塔式结构布局,将单支的口服液、玻璃安瓿瓶加持于夹具内,在旋转过程中对瓶体进行采像,通过图像识别后判定产品的质量,此类检测识别仅能满足单支的玻璃包装产品的检测,不能够满足同批次内的多支检测,检测效率受到限制。
4.因此,如何能够提供一种解决上述技术问题的塑料安瓿外观异物自动检测系统是本领域技术人员亟需解决的技术问题。
技术实现要素:
5.本发明的目的是提供一种塑料安瓿外观异物自动检测系统,在直线输送过程中进行图像采集,实现塑料安瓿瓶的全面检测,塑料安瓿瓶的检测数量不受限制,提高了检测效率。
6.为实现上述目的,本发明提供一种塑料安瓿外观异物自动检测系统,包括用于加持并输送塑料安瓿瓶的输送装置,沿所述输送装置的输送方向设置的检测装置,设置于所述输送装置的输送末端的剔除装置,与所述输送装置、所述检测装置和所述剔除装置连接的控制装置,所述控制装置用于根据所述检测装置的检测结果、控制所述剔除装置剔除不合格的所述塑料安瓿瓶。
7.优选地,所述输送装置包括夹瓶输送带,所述夹瓶输送带具有一对用于加持并输送所述塑料安瓿瓶的带体。
8.优选地,所述夹瓶输送带包括在输送方向上同向延伸设置、在高度方向上错位设置的顶部输送带和底部输送带,所述顶部输送带用以于所述塑料安瓿瓶的上部加持,所述底部输送带用以于所述塑料安瓿瓶的下部加持。
9.优选地,所述底部输送带设置于所述输送装置的起始端,所述顶部输送带设置于所述输送装置的结束端。
10.优选地,所述检测装置包括若干沿输送方向设置的智能相机,不同的所述智能相机用以于不同的方位检测所述塑料安瓿瓶。
11.优选地,所述智能相机包括邻近所述底部输送带设置的第一智能相机、第二智能相机和第三智能相机,以及邻近所述顶部输送带设置的第四智能相机、第五智能相机和第
六智能相机;所述第一智能相机用于检测所述塑料安瓿瓶的液位,所述第二智能相机用于检测所述塑料安瓿瓶的右侧上部,所述第三智能相机用于检测所述塑料安瓿瓶的左侧上部,所述第四智能相机用于检测所述塑料安瓿瓶的左侧下部,所述第五智能相机用于检测所述塑料安瓿瓶的右侧下部,所述第六智能相机用于检测所述塑料安瓿瓶的底部。
12.优选地,所述输送装置还包括进瓶链板线和出瓶链板线,所述进瓶链板线设置于所述输送装置的起始端,所述出瓶链板线设置于所述输送装置的结束端。
13.优选地,所述输送装置还包括调节组件,所述调节组件用于调节所述夹瓶输送带的中心间距。
14.优选地,所述剔除装置包括剔除气缸,所述剔除气缸设置于所述出瓶链板线的一侧。
15.优选地,所述出瓶链板线的另一侧设有接料箱以及连接所述接料箱和所述出瓶链板线的滑槽。
16.相对于上述背景技术,本发明所提供的塑料安瓿外观异物自动检测系统,包括输送装置、检测装置、剔除装置和控制装置,输送装置用于加持并输送塑料安瓿瓶,检测装置沿输送装置的输送方向设置,剔除装置设置于输送装置的输送末端,控制装置与输送装置、检测装置和剔除装置连接,控制装置用于根据检测装置的检测结果、控制剔除装置剔除不合格的塑料安瓿瓶。
17.在该塑料安瓿外观异物自动检测系统的工作过程中,控制装置作为整个系统的控制中心,首先控制输送装置,由输送装置实现塑料安瓿瓶的加持和输送;再控制检测装置,由检测装置实现塑料安瓿瓶的外观缺陷检测;最终控制剔除装置,由剔除装置将塑料安瓿瓶中的不合格产品剔除。综上,该塑料安瓿外观异物自动检测系统在直线输送过程中进行图像采集,实现塑料安瓿瓶的全面检测,塑料安瓿瓶的检测数量不受限制,提高了检测效率。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
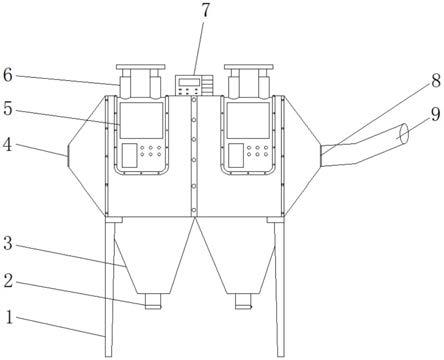
19.图1为本发明实施例提供的塑料安瓿外观异物自动检测系统的正视图;
20.图2为本发明实施例提供的塑料安瓿外观异物自动检测系统的俯视图;
21.图3为图1中出瓶链板线处的放大示意图;
22.图4为图1中顶部输送带处的放大示意图;
23.图5为图1中底部输送带处的放大示意图;
24.图6为图1中进瓶链板线处的放大示意图;
25.图7为图2中剔除气缸处的放大示意图;
26.图8为图2中第六智能相机处的放大示意图;
27.图9为图2中第五智能相机处的放大示意图;
28.图10为图2中第一智能相机处的放大示意图;
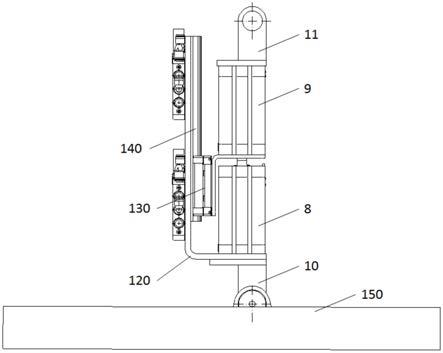
29.图11为图10中调节组件处的放大示意图;
30.图12为图6中塑料安瓿瓶处的放大示意图。
31.其中:
[0032]1‑
机架、2
‑
夹瓶输送带、3
‑
进瓶链板线、4
‑
出瓶链板线、5
‑
调节组件、6
‑
接料箱、7
‑
滑槽、8
‑
剔除气缸、9
‑
塑料安瓿瓶、101
‑
第一智能相机、102
‑
第二智能相机、103
‑
第三智能相机、104
‑
第四智能相机、105
‑
第五智能相机、106
‑
第六智能相机、201
‑
输送驱动电机、202
‑
夹瓶输送带驱动轮、203
‑
顶部输送带、204
‑
转换带轮、205
‑
底部输送带、206
‑
从动带轮。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
为了使本技术领域的技术人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
[0035]
请参考图1至图12,其中,图1为本发明实施例提供的塑料安瓿外观异物自动检测系统的正视图,图2为本发明实施例提供的塑料安瓿外观异物自动检测系统的俯视图,图3为图1中出瓶链板线处的放大示意图,图4为图1中顶部输送带处的放大示意图,图5为图1中底部输送带处的放大示意图,图6为图1中进瓶链板线处的放大示意图,图7为图2中剔除气缸处的放大示意图,图8为图2中第六智能相机处的放大示意图,图9为图2中第五智能相机处的放大示意图,图10为图2中第一智能相机处的放大示意图,图11为图10中调节组件处的放大示意图,图12为图6中塑料安瓿瓶处的放大示意图。
[0036]
在第一种具体的实施方式中,本发明所提供的塑料安瓿外观异物自动检测系统包括输送装置、检测装置、剔除装置和控制装置,上述装置以机架1为基准进行安装固定;其中,控制装置作为整个系统的控制中心,连接并控制输送装置、检测装置和剔除装置;输送装置的作用在于加持固定塑料安瓿瓶9,并带动其输送转移;检测装置的作用在于通过观察外观,检测塑料安瓿瓶9是否存在缺陷,其沿输送装置的输送方向设置,从而在塑料安瓿瓶9的输送过程中同步进行检测;剔除装置的作用在于通过向外施力,将存有缺陷的不合格塑料安瓿瓶9剔除,其设置于输送装置的输送末端,从而在塑料安瓿瓶9输送结束时进行剔除。
[0037]
在该塑料安瓿外观异物自动检测系统的工作过程中,首先控制输送装置,由输送装置实现塑料安瓿瓶9的加持和输送;再控制检测装置,由检测装置实现塑料安瓿瓶9的外观缺陷检测;最终控制剔除装置,由剔除装置将塑料安瓿瓶9中的不合格产品剔除。综上,该塑料安瓿外观异物自动检测系统在直线输送过程中进行图像采集,实现塑料安瓿瓶9的全面检测,塑料安瓿瓶9的检测数量不受限制,提高了检测效率。
[0038]
需要说明的是,本发明的核心改进点在于上述直线输送过程中的检测方式。除此以外,输送装置可仅采用传送带实现输送与加持、或结合采用传送带的输送与夹具的加持,同应属于本实施例的说明范围;检测装置可采用图像检测技术,先拍摄图片,再处理图像信息,最终比对得出结果,也可采用其他检测技术,同应属于本实施例的说明范围;剔除装置可采用气缸直接驱动施力,也可采用连杆机构等受驱后向外施力,同应属于本实施例的说
明范围;控制装置可采用控制器,如plc、计算机等,同应属于本实施例的说明范围。
[0039]
在一种具体的实施方式中,输送装置包括夹瓶输送带2,夹瓶输送带2具有一对用于加持并输送塑料安瓿瓶9的带体。
[0040]
在本实施例中,输送装置采用夹瓶输送带2的方式实现塑料安瓿瓶9的加持与输送;在其工作过程中,塑料安瓿瓶9移动至夹瓶输送带2的中心,在夹瓶输送带2的作用下,同时实现加持固定和继续向前输送。
[0041]
更具体的,夹瓶输送带2包括在输送方向上同向延伸设置、在高度方向上错位设置的顶部输送带203和底部输送带205,顶部输送带203用以于塑料安瓿瓶9的上部加持,底部输送带205用以于塑料安瓿瓶9的下部加持。
[0042]
在本实施例中,夹瓶输送带2设置于机架1的中部,夹瓶输送带2包括输送驱动电机201、夹瓶输送带驱动轮202、顶部输送带203、转换带轮204、底部输送带205和从动带轮206,输送驱动电机201设置于夹瓶输送带2的末端,夹瓶输送带驱动轮202安装于输送驱动电机201端部,转换带轮204设置于夹瓶输送带2的中部,夹瓶输送带驱动轮202和转换带轮204之间设置顶部输送带203,在夹瓶输送带2的前端设置从动带轮206,在从动带轮206和转换带轮204之间设置底部输送带205,顶部输送带203位于顶部,底部输送带205位于底部。
[0043]
在塑料安瓿瓶9的直线输送过程中,夹瓶输送带2对塑料安瓿瓶9的输送方向始终向前,但夹瓶输送带2对塑料安瓿瓶9的加持方式区别为两种,一种为顶部输送带203的上部加持,另一种为底部输送带205的上部加持。在此基础上,当塑料安瓿瓶9处于上部加持的状态时,其中下部处于暴露状态,易于检测时的图像采集,进而实现外观和异物的自动检测;当塑料安瓿瓶9处于下部加持状态时,其中上部处于暴露状态,易于检测时的图像采集,进而实现外观和异物的自动检测。
[0044]
示例性的,底部输送带205设置于输送装置的起始端,顶部输送带203设置于输送装置的结束端。
[0045]
在本实施例中,底部输送带205位于顶部输送带203之前。在塑料安瓿瓶9的直线输送过程中,塑料安瓿瓶9先进入底部输送带205,此时塑料安瓿瓶9处于下部加持的状态,呈竖立放置状,随着向前的移动,便于对中上部的任何位置进行检测;随后,塑料安瓿瓶9离开底部输送带205并进入顶部输送带203,此时塑料安瓿瓶9处于上部加持的状态,呈竖立吊挂状,随着向前的移动,便于对中下部的任何位置进行检测。
[0046]
在一种具体的实施方式中,检测装置包括若干沿输送方向设置的智能相机,不同的智能相机用以于不同的方位检测塑料安瓿瓶9。
[0047]
在本实施例中,检测装置采用图像检测的方式实现对塑料安瓿瓶9的外观检测;智能相机的数量不受限制,根据所需检测的点位进行调整。
[0048]
示例性的,智能相机包括邻近底部输送带205设置的第一智能相机101、第二智能相机102和第三智能相机103,以及邻近顶部输送带203设置的第四智能相机104、第五智能相机105和第六智能相机106。
[0049]
在本实施例中,第一智能相机101、第二智能相机102、第三智能相机103、第四智能相机104、第五智能相机105和第六智能相机106沿输送方向按序一一设置。其中,第一智能相机101用于检测塑料安瓿瓶9的液位,第二智能相机102用于检测塑料安瓿瓶9的右侧上部,第三智能相机103用于检测塑料安瓿瓶9的左侧上部,第四智能相机104用于检测塑料安
瓿瓶9的左侧下部,第五智能相机105用于检测塑料安瓿瓶9的右侧下部,第六智能相机106用于检测塑料安瓿瓶9的底部。
[0050]
需要注意的是,塑料安瓿瓶9在吹瓶、灌装、裁剪后进行灭菌,经过一系列工艺生产之后需要对塑料安瓿瓶9进行外观和异物进行检查,避免存在质量问题的药品流入市场。该塑料安瓿外观异物自动检测系统,采用智能相机采集输送过程中的塑料安瓿瓶9的图像照片,通过控制装置中具有识别判断的单元,或检测装置中接入的图像识别系统,其重点在于经过图像识别技术识别产品表面破损、划痕、异物、液位等情况,进而对产品进行质量判定,判定塑料安瓿瓶9是否存在缺陷,通过剔除装置将存在缺陷产品剔除,实现塑料安瓿瓶9的自动检测。
[0051]
除此以外,该塑料安瓿外观异物自动检测系统,还采用上下分段加持式输送方式进行塑料安瓿瓶9输送,通过双面、双区域图像采集,实现塑料安瓿瓶9的全面检测,在直线输送过程中进行图像采集,生产效率高。
[0052]
除此以外,输送装置还包括进瓶链板线3和出瓶链板线4,进瓶链板线3设置于输送装置的起始端,出瓶链板线4设置于输送装置的结束端。
[0053]
在本实施例中,进瓶链板线3和出瓶链板线4分别起到将塑料安瓿瓶9于夹瓶输送带2送入和送出的作用。进瓶链板线3和出瓶链板线4的中心线与夹瓶输送带2的中心线重合,塑料安瓿瓶9沿上述中心线放置于进瓶链板线3,由此沿该中心线送入夹瓶输送带2,并沿该中心线由出瓶链板线4送出。
[0054]
除此以外,输送装置还包括调节组件5,调节组件5用于调节夹瓶输送带2的中心间距。
[0055]
在本实施例中,调节组件5设置于夹瓶输送带2的一侧,转动调节组件5的手轮可以调节夹瓶输送带2的中心间距。
[0056]
在一种具体的实施方式中,剔除装置包括剔除气缸8,剔除气缸8设置于出瓶链板线4的一侧。
[0057]
在本实施例中,剔除装置采用气缸推动的方式实现对塑料安瓿瓶9的不合格剔除。
[0058]
除此以外,出瓶链板线4的另一侧设有接料箱6以及连接接料箱6和出瓶链板线4的滑槽7。
[0059]
在本实施例中,进瓶链板线3设置于机架1一侧,出瓶链板线4设置于机架1的另一侧,接料箱6设置于出瓶链板线4的一侧的下部,用于盛放被剔除的产品,滑槽7设置于出瓶链板线4剔除口与接料箱6之间,剔除气缸8设置于出瓶链板线4的另一侧。
[0060]
在一种具体的工作过程中:
[0061]
塑料安瓿瓶9由进瓶链板线3输送进入夹瓶输送带2的底部输送带205的内部,由底部输送带205加持塑料安瓿瓶9往前输送,在输送过程中塑料安瓿瓶9到达第一智能相机101的采像区域,第一智能相机101采集塑料安瓿瓶9上部区域图像,由图像识别系统判定塑料安瓿瓶9的液位高度是否为可以接受范围;
[0062]
随着塑料安瓿瓶9继续往前输送,塑料安瓿瓶9进入第二智能相机102的采像区域,第二智能相机102采集塑料安瓿瓶9右侧上部区域图像,由图像识别系统判定塑料安瓿瓶9的右侧上部区域划痕、异物、坏瓶缺陷否为可以接受范围;
[0063]
随着塑料安瓿瓶9继续往前输送,塑料安瓿瓶9进入第三智能相机103的采像区域,
第三智能相机103采集塑料安瓿瓶9左侧上部区域图像,由图像识别系统判定塑料安瓿瓶9的左侧上部区域划痕、异物、坏瓶缺陷否为可以接受范围;
[0064]
随着塑料安瓿瓶9继续往前输送,塑料安瓿瓶9经过转换带轮204,由顶部输送带203加持塑料安瓿瓶9顶部继续输送,当塑料安瓿瓶9进入第四智能相机104的采像区域,第四智能相机104采集塑料安瓿瓶9左侧下部区域图像,由图像识别系统判定塑料安瓿瓶9的左侧下部区域划痕、异物、坏瓶缺陷否为可以接受范围;
[0065]
随着塑料安瓿瓶9继续往前输送,塑料安瓿瓶9进入第五智能相机105的采像区域,第五智能相机105采集塑料安瓿瓶9右侧下部区域图像,由图像识别系统判定塑料安瓿瓶9的右侧下部区域划痕、异物、坏瓶缺陷否为可以接受范围;
[0066]
随着塑料安瓿瓶9继续往前输送,塑料安瓿瓶9进入第六智能相机106的采像区域,第六智能相机106采集塑料安瓿瓶9底部区域图像,由图像识别系统判定塑料安瓿瓶9的底部区域划痕、异物、坏瓶缺陷否为可以接受范围;
[0067]
塑料安瓿瓶9继续由夹瓶输送带2输送出区到达出瓶连扳线4,综合多个智能相机采集图像识别情况判定流出的塑料安瓿瓶9是否为合格品,如果判定该塑料安瓿瓶9为不合格品,当塑料安瓿瓶9到达剔除气缸8的区域时,剔除气缸8伸出,将不合格品推入滑槽7,由滑槽7将不合格瓶滑至接料箱6内,合格的塑料安瓿瓶9则被输送至后段工序,实现塑料安瓿瓶9的自动检测。
[0068]
需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
[0069]
以上对本发明所提供的塑料安瓿外观异物自动检测系统进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。