eva鞋机生产线用龙门架
技术领域
1.本实用新型涉及机械设备领域,具体指的是eva鞋机生产线用龙门架。
背景技术:
2.eva发泡成型机生产加工时,需要进行对模具进行清理或成品的拿取等工序,目前这些工序均依靠人工或通过人工使用设备进行,例如通过人工提着清洗装置对模具进行清理,不仅工作强度高,同时工作效率低。
技术实现要素:
3.本实用新型的目的在于克服上述不足,提供一种eva鞋机生产线用龙门架。
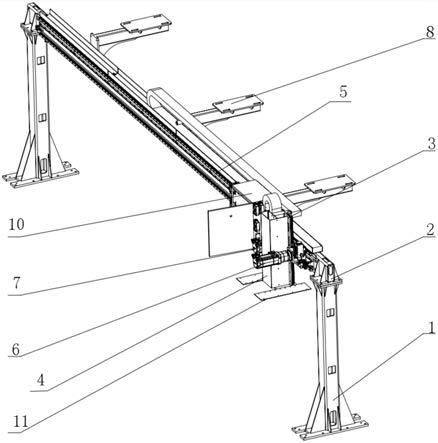
4.本实用新型公开一种eva鞋机生产线用龙门架,包括两立柱、设置在两立柱之间的x轴梁,该x轴梁上设置有工装组件,该工装组件可在x轴梁上横向移动,该工装组件包括z轴导轨、设置在z轴导轨上的工装连接件,该工装连接件可在z轴导轨上纵向移动。
5.优选的,该x轴梁靠近工装组件的一侧设置有x轴导轨,该z轴导轨通过齿轮齿条机构与x轴导轨连接。
6.优选的,该z轴导轨上设置有第一驱动件,该第一驱动件的输出端与齿轮齿条机构连接,可通过齿轮齿条机构驱动z轴导轨在x轴导轨上横向移动。
7.优选的,该工装连接件上设置有第二驱动件,该驱动件的输出端通过齿轮齿条机构与z轴导轨连接,该第二驱动件可通过齿轮齿条机构驱动工装连接件在z轴导轨上纵向移动。
8.优选的,该第一驱动件和第二驱动件均为伺服电机驱动。
9.优选的,该x轴梁上设置有多个用于与eva鞋机连接的横梁。
10.优选的,两立柱底端均设置有至少一移动滑轮。
11.优选的,该工装连接件上设置有电控箱,该电控箱内集成有电源模块、控制模块、信号接收模块,该控制模块与第一驱动件、第二驱动件电连接,用于控制第一驱动件、第二驱动件的启停;该z轴导轨和工装连接件上均设置有传感器,该信号接收模块用于接收传感器感应的位移信号,并将其输送给控制模块。
12.通过采用上述的技术方案,本实用新型的有益效果是:
13.通过第一驱动件可控制z轴导轨在x轴梁上横向移动,第二驱动件可控制工装连接件在z轴导轨上纵向移动,同时工装连接件可连接清洁装置、取料装置等,即可通过控制模块自动控制工装连接件实现x、z轴上的任意位置的停止,相对于人工操作,工作效率高,工作强度低。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅
是本实用新型的一个或数个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据此类附图获得其他的附图。
15.图1为本实用新型龙门架结构示意图;
16.图2为本实用新型立柱局部结构示意图;
17.图3为本实用新型龙门架使用状态示意图。
18.主要附图标记说明:1立柱,2x轴梁,3z轴导轨,4工装连接件,5x轴导轨,6第一驱动件,7第二驱动件,8横梁,9移动滑轮,10电控箱,11护罩安装板,12eva发泡机。
具体实施方式
19.以下将结合附图及实施例来详细说明本实用新型的实施方式,借此对本实用新型如何应用技术手段来解决技术问题,并达成技术效果的实现过程能充分理解并据以实施。需要说明的是,只要不构成冲突,本实用新型中的各个实施例以及各实施例中的各个特征可以相互结合,所形成的技术方案均在本实用新型的保护范围之内。
20.同时,在以下说明中,处于解释的目的而阐述了许多具体细节,以提供对本实用新型实施例的彻底理解。然而,对本领域的技术人员来说显而易见的是,本实用新型可以不用这里的具体细节或者所描述的特定方式来实施。
21.[根据本实用新型提供的eva鞋机生产线用龙门架]
[0022]
eva鞋机生产线用龙门架,参照图3,龙门架配合eva发泡机12进行使用,主要通过龙门架带动辅助装置对eva发泡机12进行操作,参照图1,包括两立柱1、设置在两立柱1之间的x轴梁2,该x轴梁2上设置有工装组件,该工装组件可在x轴梁2上横向移动,该工装组件包括z轴导轨3、设置在z轴导轨3上的工装连接件4,该工装连接件4可在z轴导轨3上纵向移动,工装连接件4底部还设有护罩安装板11,护罩安装板11用于防护罩的安装,工装连接件4用于连接对eva发泡机12进行清洗的清洗装置、用于成品取料的取料装置等辅助装置;进一步的,参照图1,该x轴梁2靠近工装组件的一侧设置有x轴导轨5,该z轴导轨3通过齿轮齿条机构与x轴导轨5连接;该z轴导轨3上设置有第一驱动件6,该第一驱动件6的输出端与齿轮齿条机构连接,可通过齿轮齿条机构驱动z轴导轨3在x轴导轨5上横向移动。
[0023]
进一步的,该工装连接件4上设置有第二驱动件7,该驱动件的输出端通过齿轮齿条机构与z轴导轨3连接,该第二驱动件7可通过齿轮齿条机构驱动工装连接件4在z轴导轨3上纵向移动。
[0024]
作为优选的,该第一驱动件6和第二驱动件7均为伺服电机驱动,但不局限于伺服电机驱动。
[0025]
进一步的,该x轴梁2上设置有多个用于与eva鞋机连接的横梁8,通过多个横梁8与eva发泡机12连接,提高龙门架与eva发泡机12连接的稳定性。
[0026]
进一步的,参照如2,两立柱1底端均设置有至少一移动滑轮9,该移动滑轮9与立柱可拆卸连接,单体承载重量为1000kg仅在安装和维修使用;将该工装用螺栓与立柱1地板连接,将龙门架整体提升15mm,通过移动滑轮9便于移动龙门架的整体移动。
[0027]
进一步的,该工装连接件4上设置有电控箱10,该电控箱10内集成有电源模块、控制模块、信号接收模块,该控制模块与第一驱动件6、第二驱动件7电连接,用于控制第一驱动件6、第二驱动件7的启停;该z轴导轨3和工装连接件4上均设置有传感器,该信号接收模
块用于接收传感器感应的位移信号,并将其输送给控制模块,
[0028]
实施例1
[0029]
工装连接件4可连接用于eva发泡机12模具清理的清洁装置或用于成品鞋底取料的抓料装置,通过伺服电机驱动z轴导轨3在x轴导轨5上横向移动,并通过伺服电机驱动工装连接件4在z轴轴导轨上纵向移动,通过传感器感应清洁装置或抓料装置纵向和横向移动的距离,并将距离信号输送给控制模块,待距离达到设定值时可通过控制模块控制伺服电机关闭,即清洁装置或抓料装置被移动至指定位置,清洁装置或抓料装置的横向移动重复定位精度为
±
0.05mm,最大行程为7000mm,纵向移动重复定位精度为
±
0.05mm,最大行程为650mm,纵向移动完成后续eva发泡机12的各项工作,即可通过控制模块自动控制清洁装置或抓料装置实现x、z轴上的任意位置的停止,相对于人工操作,工作效率高,工作强度低。
[0030]
需说明,在上文的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型的保护范围并不受下面公开的具体实施例的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。