一种原位3d打印软骨修复装置
技术领域
1.本实用新型属于増材制造技术领域,具体涉及一种原位3d打印软骨修复装置。
背景技术:
2.传统软骨修复技术有骨髓刺激术和马赛克成形术,骨髓刺激术通过对软骨下骨的钻孔、磨蚀或微骨折来刺激软骨愈合,马赛克成形术通过挖取非运动关节软骨填充软骨损伤处,达到软骨愈合的目的。传统软骨修复技术是一种破坏性的方式达到软骨修复的目的,对人体有一定的损伤。
3.新型软骨修复技术为组织工程技术,将接种有软骨细胞的生物材料添加到软骨损伤处,直接植入。现有技术主要是基于手持式3d打印设备的软骨修复方式,其主要过程是临床医生通过手持生物枪直接在软骨破损处添加修复材料以达到治疗目的。但这种通过医生手持生物枪的方法无法保证修复精度要求,且仅能打印修复简单形状的软骨缺损,无法满足人体内环境复杂的情况。
技术实现要素:
4.本实用新型的主要目的在于克服现有技术的缺点与不足,提出一种原位3d打印软骨修复装置,通过数字化手段精确控制机械臂已达到精准修改软骨组织的目的。
5.为了达到上述目的,本实用新型采用以下技术方案:
6.一种原位3d打印软骨修复装置,与主控板连接,包括透镜、原材料容器、固化光源、转接架、光纤、三通头、推动板、模组、注射针、压板以及机械臂;
7.所述透镜通过u形卡槽固设在三通头内部,所述三通头与光纤通过螺纹连接,所述光纤与固化光源通过螺纹连接,所述固化光源与转接架通过螺栓连接,所述模组与转接架通过螺栓螺母配合连接,所述推动板与模组通过螺栓螺母连接,所述转接架与机械臂通过螺栓连接,所述原材料容器与模组通过所述压板固定连接,所述注射针与原材料容器通过螺纹连接;
8.所述光源通过光纤进入三通头,透镜将光源聚焦并从侧面射出照在注射针顶端,模组通过推动板推压原材料容器,原材料从注射针流出,在光照下边注射边凝固,打印过程配合机械臂控制打印位置与打印方向。
9.进一步的,所述模组包括步进电机、导轨、滑台、螺杆、联轴器以及支架,所述步进电机通过联轴器与螺杆连接,步进电机和导轨通过螺栓螺母与支架连接,所述滑台与导轨通过配合使滑台在导轨上滑动,滑台与螺杆通过螺旋副传递动力。
10.进一步的,所述步进电机在主控板的控制下,转动特定角度,通过螺杆传动控制推动板推进特定的平移距离,从而挤出相应的打印原材料。
11.进一步的,所述原材料容器具体采用可更换注射器。
12.进一步的,所述注射器与转接架具体通过两块压板连接,注射器的推压端与模组的推动板通过压板连接。
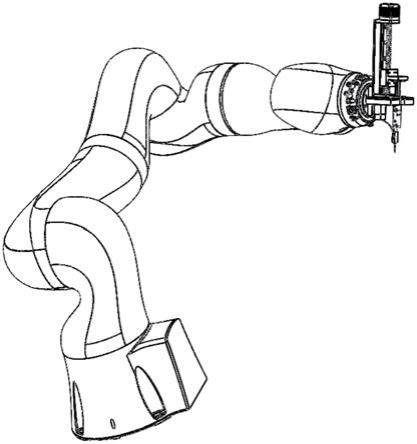
13.进一步的,所述机械臂为6轴机械臂,用于精确控制注射针的打印位置以及打印方向。
14.进一步的,所述固化光源具体采用蓝光。
15.本实用新型与现有技术相比,具有如下优点和有益效果:
16.1、本实用新型通过机械臂带动打印头直接在软骨缺陷处直接原位打印修复,过程简单,人工介入时间短,通过数字化手段控制的6轴机械臂原位3d打印技术,可实现多种生物材料、多种结构的高精度原位3d打印精准修复。
17.2、本实用新型通过使用注射器来贮存原材料,具有方便更换、容易储存、材料可控等优点,打印不同材料只需直接更换注射器而不需要更换打印机其余机构。
18.3、本实用新型通过模组来挤出材料,使供给原材料均匀有序,也可以通过模组在打印结束后回抽材料,同时使供料结构紧凑;实用新型使用6轴机械臂来带动供料装置取代传统手持式3d打印枪,打印精度高,打印速度快。
19.4、本实用新型采用光纤将蓝光源发出的蓝光传入透镜聚焦蓝光,使蓝光聚焦照射在注射针头的打印材料上,使能量密度更高,凝固范围更加精确。
附图说明
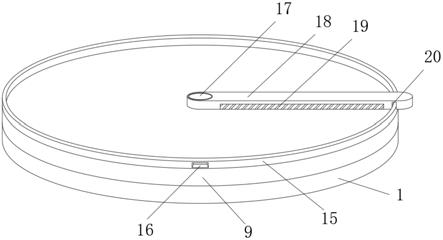
20.图1是本实用新型装置的整体结构图;
21.图2是本实用新型装置的打印头局部图;
22.图3是本实用新型三通头的局部图;
23.图4是本实用新型装置的工作流程图;
24.附图标号说明:1
‑
机械臂;2
‑
转接架;3
‑
蓝光源;4
‑
光纤;5
‑
模组;6
‑
推动板;7
‑
压板;8
‑
注射器;9
‑
三通头;10
‑
注射针;11
‑
透镜。
具体实施方式
25.下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
26.实施例
27.如图1、图2以及图3所示,本实用新型,一种原位3d打印软骨修复装置,包括机械臂1、转接架2、蓝光源3、光纤4、模组5、推动板6、压板7、注射器8、三通头9、注射针10以及透镜11,所述透镜11通过u形卡槽固定在三通头9内部,所述三通头9与光纤4通过螺纹连接,所述光纤4与蓝光源3通过螺纹连接,所述蓝光源3与转接架2通过螺栓连接,所述模组5与转接架2通过螺栓螺母配合连接,所述推动板6与模组5通过螺栓螺母连接,所述注射器8与模组通过压板7连接,所述注射针10与注射器8通过螺纹连接,所述转接架2与机械臂1通过螺栓连接;所述注射器8与转接架通过两块压板7连接,注射器8的挤压端与模组5的推动板通过压板7连接。
28.在本实施例中,本实用新型装置与主控板连接,配合主控板工作。
29.如图2所示,在本实施例中,所述模组包括步进电机、导轨、滑台、螺杆、联轴器以及支架,所述步进电机通过联轴器与螺杆连接,步进电机和导轨通过螺栓螺母与支架连接,所述滑台与导轨通过配合使滑台在导轨上可以滑动,滑台与螺杆通过螺旋副传递动力;所述
步进电机在主控板的控制下,转动特定角度,通过螺杆传动控制推动板推进特定的平移距离,从而精确挤出相应的打印原材料,通过控制步进电机的转动角度来控制推动端的平移距离进而实现控制修复材料的挤出量。如图1所述,所述机械臂为6轴机械臂,用于精确控制注射针的打印位置以及打印方向。
30.在本实施例中,如图3所示,三通头将蓝光源产生的蓝光通过透镜汇聚,使产生蓝光集中射出照在注射针顶端,最终的聚焦点与注射针头的打印位置相配合。
31.采用基于上述实施例的软骨修复流程,如图4所示,包括以下步骤:
32.s1、使用医学影像设备扫描损坏部分组织,在计算机软件上建出组织损坏部位的物理模型和待修复部分模型,切片软件并根据不同状况生成相应的打印程序,并将程序导入主控板;
33.s2、将装满修复原材料的注射器通过压板装到转接架上,并控制模组步进电机的转动角度,使推压板与注射器的挤压端贴紧,并使注射针流出极少量的修复材料,从而避免打印开始后无材料流出。
34.s3、6轴机械臂在主控板的控制下,精确做出相应动作,将注射针移动到打印的初始位置与初始方向。
35.s4、步进电机在主控板的控制下,通过推动板精确推压注射器,将注射器中的原材料推入三通头和注射针,原材料从注射针顶中流出,同时蓝光通过光纤和透镜最终聚焦在注射针顶端,实现修复原材料聚焦蓝光的照射下发生光聚合反应而凝固;
36.s5、6轴机械臂在主控板的控制下,与模组精确配合,将修复原材料精确的送到软骨破损位置并完成光聚合固化;
37.s6、根据切片软件生成的打印程序逐层打印,直至完成打印,实现软骨破损的数字化精确修复;
38.s7、软骨修复打印结束后,控制步进电机反转,使推动板反向拉注射器的推压端,从而达到打印结束材料立即停止供应的目的。
39.为了更好的展示本实用新型的技术方案,以修复膝盖软骨组织为例做进一步说明。生物体内的组织修复,情况及其复杂,修复难度高。不同生物体的同一部位以及同一生物体的不同部位情况都会有所不同,而且修复的精度必须得到保证,才能使修复部位达到完全康复的状态,否则适得其反。通过医生手持生物枪来修复组织,虽然能应对复杂的情况,但其精度得不到保证;而普通的三轴打印机与生物枪的配合,虽然精度有了保障,但不能适应组织复杂的曲面结构修复;而本实用新型在保证了修复精度的基础上,又有着解决复杂修复工作的能力。具体的,为了临床实用性,图像配准需要自动、实时地完成。为了达到这一目标,需要在术中能实时测量手术对象的几何形状信息。本实施例采用超声成像技术,结合机器人关节位置传感器信息对术中环境进行定量测量,采用超声传感器结合机器人运动学方程完成骨表面形状提取,通过调节超声波的频率可以达到不同深度的穿透效果,可以使用超声获取被组织包裹的骨表面信息,从而提取三维特征形状。得到手术对象表面形状后,采用形状匹配算法进行曲面匹配,完成图像坐标系与机器人坐标系之间的映射。将修复模型导入相应的打印软件,生成相应的驱动信号,使6轴机械臂运动,按着最优的3d原位修复打印轨迹将破损处的软骨组织精确高效地修复。
40.还需要说明的是,在本说明书中,诸如术语“包括”、“包含”或者其任何其他变体意
在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
41.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其他实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。