1.本发明涉及短带料上产品落料和包装的技术领域,特别是一种用于短带料上产品的包装机。
背景技术:
2.短带料包括边框,边框内且沿其长度方向成型有多个产品,产品与边框之间连接有连接载体,边框的长度为20~30cm,工艺上要求将短带料上的产品冲裁下来,冲裁下来后,将各个独立的产品依次装入到载盘上,从而实现对短带料上产品的包装。现有包装产品的方法是工人先拿住短带料的尾部,然后将短带料上位于其首端的产品从右往左输送到落料模具的落料工位上,到位后,控制落料模具闭模,闭模后,落料模具上的凸模刃口将首端的产品从边框上冲裁下来,随后工人继续向左推动短带料,以使下一个产品进入到落料工位,重复以下操作,即可将第二个产品从边框上冲裁下来,如此操作,即可冲裁出多个产品,同时在落料模具的左侧输送出废边框,当短带料的尾部快要接近落料模具时,工人向左拉动废边框,以确保短带料上后续的产品进入落料工位,同时保证了人的手部安全,当短带料上位于尾端的产品被冲裁下来后,在落料模具的左侧即可得到不带有产品的废边框,最终工人将冲裁下来的产品用镊子依次装入到载盘上各个容纳槽内,从而最终实现了产品的包装。
3.然而,这种方法虽然能够实现对产品的包装,但是在实际的生产过程中,管理人员发现出如下技术问题:1、需要人工先向左推动短带料的尾部,一段时间后,再向左拉动废边框,整个过程,均通过人工操作,这无疑是增加了工人的工作强度,且增加了人力成本,而且人工操作还存在一定的安全隐患,即落料模具很容易压伤工人的手指。2、通过落料模具冲裁下来的产品四处飞溅,不利于后续收集产品,从而降低了产品的包装效率。3、需要人工采用镊子一个接一个的将产品夹持到载盘的容纳槽内,而人工操作效率低,且还需要区分产品的正反面,区分完毕后,才能将产品夹持到载盘的容纳槽内,这无疑是进一步的降低了产品的包装效率。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点,提供一种结构紧凑、提高产品包装效率、减轻工人工作强度、安全可靠、自动化程度高的用于短带料上产品的包装机。
5.本发明的目的通过以下技术方案来实现:一种用于短带料上产品的包装机,它包括工作台、设置于工作台台面上的反冲落料模具,所述工作台的台面上固设有两根导轨,两根导轨分别设置于反冲落料模具的前后侧,位于后侧导轨的后侧设置有皮带输送装置,两根导轨之间设置有框架,框架套设于反冲落料模具的外侧,框架的前后边的底表面上均固设有滑块,两个滑块分别滑动安装于两根导轨上,皮带输送装置的皮带固设于框架后边的顶表面上, 框架的左右边上分别设置有左拉料机构和右拉料机构,右拉料机构包括夹紧气缸和压板,夹紧气缸的缸筒固设于框架右边的底表面上,夹紧气缸的活塞杆贯穿框架的右
边设置,且延伸端上固设有压板;所述皮带输送装置的后侧设置有机器人手臂,机器人手臂的执行端上设置有吸头,吸头上的接口与抽真空系统经管道连接。
6.所述反冲落料模具包括下模和上模,所述下模内设置有凸模刃口,所述上模内设置有落料口。
7.两根导轨相互平行设置。
8.位于前侧导轨的前侧设置有支架。
9.所述支架上由右往左依次固设有右立板、中间立板和左立板,右立板设置于反冲落料模具的右侧,左立板设置于反冲落料模具的左侧,右立板、中间立板和左立板的后端面上均设置有槽钢,位于左侧的槽钢的底表面上设置有左感应电眼,位于中间的槽钢的底表面上设置有中间感应电眼,位于右侧的槽钢的底表面上设置有右感应电眼,三个感应电眼发出的红外光线射入到与其对应的槽钢的凹槽内。
10.所述左感应电眼、中间感应电眼和右感应电眼均与控制器连接。
11.所述框架的前边上固设有左挡板和右挡板,初始状态下,左挡板设置于中间槽钢内,右挡板设置于右侧槽钢内。
12.所述皮带输送装置包括皮带、固定板和步进电机,所述固定板固设于工作台的台面上,固定板平行于导轨设置,固定板的前端面上经转轴旋转安装有主动带轮和从动带轮,皮带安装于主动带轮和从动带轮之间,步进电机固设于固定板的后端面上,步进电机的输出轴与主动带轮的转轴经联轴器连接。
13.所述工作台的台面上放置有载盘。
14.所述控制器与步进电机、机器人手臂、抽真空系统和夹紧气缸经信号线连接。
15.本发明具有以下优点:本发明结构紧凑、提高产品包装效率、减轻工人工作强度、安全可靠、自动化程度高。
附图说明
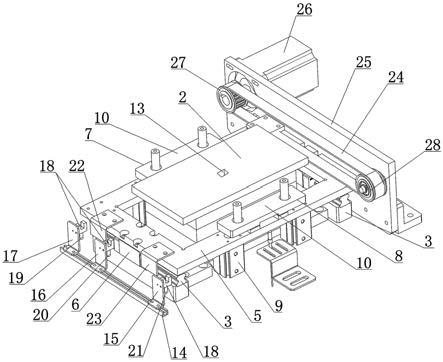
16.图1 为本发明的结构示意图;图2 为框架、拉料机构、反冲落料模具与皮带输送装置的连接示意图;图3 为图2的俯视图;图4 为机器人手臂的结构示意图;图中,1
‑
工作台,2
‑
反冲落料模具,3
‑
导轨,4
‑
皮带输送装置,5
‑
框架,6
‑
滑块,7
‑
左拉料机构,8
‑
右拉料机构,9
‑
夹紧气缸,10
‑
压板,11
‑
机器人手臂,12
‑
吸头,13
‑
落料口,14
‑
支架,15
‑
右立板,16
‑
中间立板,17
‑
左立板,18
‑
槽钢,19
‑
左感应电眼,20
‑
中间感应电眼,21
‑
右感应电眼,22
‑
左挡板,23
‑
右挡板,24
‑
皮带,25
‑
固定板,26
‑
步进电机,27
‑
主动带轮,28
‑
从动带轮,29
‑
载盘。
具体实施方式
17.下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下所述:如图1~4所示,一种用于短带料上产品的包装机,它包括工作台1、设置于工作台1台面上的反冲落料模具2,工作台1的台面上放置有载盘29,所述反冲落料模具2包括下模和上模,所述下模内设置有凸模刃口,所述上模内设置有落料口13。所述工作台1的台面上固
设有两根导轨3,两根导轨3相互平行设置,两根导轨3分别设置于反冲落料模具2的前后侧,位于后侧导轨3的后侧设置有皮带输送装置4,两根导轨3之间设置有框架5,框架5套设于反冲落料模具2的外侧,框架5的前后边的底表面上均固设有滑块6,两个滑块6分别滑动安装于两根导轨3上,皮带输送装置4的皮带24固设于框架5后边的顶表面上, 框架5的左右边上分别设置有左拉料机构7和右拉料机构8,右拉料机构8包括夹紧气缸9和压板10,夹紧气缸9的缸筒固设于框架5右边的底表面上,夹紧气缸9的活塞杆贯穿框架5的右边设置,且延伸端上固设有压板10;所述皮带输送装置4的后侧设置有机器人手臂11,机器人手臂11的执行端上设置有吸头12,吸头12上的接口与抽真空系统经管道连接。
18.如图1~3所示,位于前侧导轨3的前侧设置有支架14,所述支架14上由右往左依次固设有右立板15、中间立板16和左立板17,右立板15设置于反冲落料模具2的右侧,左立板17设置于反冲落料模具2的左侧,右立板15、中间立板16和左立板17的后端面上均设置有槽钢18,位于左侧的槽钢18的底表面上设置有左感应电眼19,位于中间的槽钢18的底表面上设置有中间感应电眼20,位于右侧的槽钢18的底表面上设置有右感应电眼21,三个感应电眼发出的红外光线射入到与其对应的槽钢18的凹槽内,所述左感应电眼19、中间感应电眼20和右感应电眼21均与控制器连接。
19.所述框架5的前边上固设有左挡板22和右挡板23,初始状态下,左挡板22设置于中间槽钢18内,右挡板23设置于右侧槽钢18内。
20.所述皮带输送装置4包括皮带24、固定板25和步进电机26,所述固定板25固设于工作台1的台面上,固定板25平行于导轨3设置,固定板25的前端面上经转轴旋转安装有主动带轮27和从动带轮28,皮带24安装于主动带轮27和从动带轮28之间,步进电机26固设于固定板25的后端面上,步进电机26的输出轴与主动带轮27的转轴经联轴器连接。
21.所述控制器与步进电机26、机器人手臂11、抽真空系统和夹紧气缸9经信号线连接。
22.本发明的工作过程如下:s1、短带料的工装固定,工人将短带料的中部放置于框架5的右边的顶表面上,且确保短带料处于水平状态,工人控制右拉料机构8的夹紧气缸9的活塞杆缩回,活塞杆带动压板10向下运动,压板10将短带料压紧在框架5的右边上,从而实现了短带料的工装固定;s2、第一个产品的包装,其具体操作步骤为:s21、控制机器人手臂动作,使吸头12的底端口抵靠在落料口13的顶表面上;s22、控制抽真空系统启动,抽真空系统对吸头12抽真空;s23、经控制器控制步进电机26启动,步进电机26带动主动带轮27转动,主动带轮27带动皮带24转动,皮带24带动框架5沿着导轨3向左运动,框架5带动左挡板22和右挡板23同步向左运动,框架5带动被夹持的短带料的首端产品进入到反冲落料模具2的落料工位上,到位后,控制器控制步进电机26关闭,随后控制器控制下模的凸模刃口向上运动,凸模刃口将首端产品向上冲裁下来,冲裁出的产品从落料口13飞出,在负压下,冲裁下来的产品被吸头12吸附住;s24、控制机器人手臂11动作,机器人手臂11将吸头12转运到载盘29的容纳腔内,进而将被吸附的产品转运到载盘29的容纳腔内,到位后,控制抽真空系统关闭,此时吸头12上的产品落到容纳腔内,从而实现了第一个产品的包装;
s3、重复步骤s21~s24的操作,框架5将短带料上后续的产品从右往左输送到落料工位,以完成后续产品的落料,同时机器人手臂11完成对落料下来的产品的包装,同时在反冲落料模具2的左侧输送出废边框,当右挡板23与右侧槽钢18分离后,右挡板23不再遮挡右感应电眼21所发出的红外光束,此时右感应电眼21发出电信号给控制器,控制器接收到该电信号后,控制器控制左拉料机构7的夹紧气缸9的活塞杆缩回,活塞杆带动压板10向下运动,压板10将废边框压在框架5的左边的顶表面上,同时控制器控制右拉料机构的夹紧气缸9的活塞杆向上伸出,活塞杆带动压板10向上运动,带有产品的短带料不再受到右拉料机构8的夹紧气缸9压紧,当框架5向左运动时,框架5带动废边框向左运动,以确保短带料上后续的产品进入落料工位,当左挡板22进入到左侧槽钢18内后,左挡板22将左感应电眼19发出的红外光线遮挡住,则说明短带料上已经没有产品,此时左感应电眼19发出电信号给控制器,控制器接收到该电信号后,控制器控制左拉料机构7的夹紧气缸9的活塞杆向上伸出,工人将废边框拿走,同时控制器控制步进电机26反转,步进电机26驱动皮带24反转,皮带24驱动框架5向右运动,当左挡板22进入到中间槽钢18内并将中间感应电眼20遮挡住,同时右挡板23进入到右侧槽钢18内并将右感应电眼21遮挡住时,控制器控制步进电机26关闭,以为包装下一个短带料上的产品做准备。
23.其中,在步骤s2~s3中,通过右拉料机构8、框架5和皮带输送装置4的配合将短带料输送到反冲落料模具的落料工位中,而后通过左拉料机构7、框架5和皮带输送装置4的配合将短带料上剩余产品输送到落料工位中,因此无需人工拉料,从而极大的减轻了工人的工作强度,同时防止了工人手指被反冲落料模具压伤,提高了生产的安全性。此外,从反冲落料模具2向上冲裁出来的产品直接被吸头12吸附住,并由机器人手臂11转运到载盘29内,以实现产品的包装,因此无需人工用镊子一个接一个包装,而是冲裁后直接包装,从而极大的提高了产品的包装效率,此外无需区分产品的正反面,进一步的提高了产品的包装效率。
24.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

