1.本技术涉及运输装置的领域,尤其是涉及一种吊笼下料运输装置。
背景技术:
2.在目前的加工生产过程中,通常会用到起吊装置,以便对人工不易搬运的部件进行起重和吊装,简化相应部件的装配和储运操作过程,提高相关吊笼部件的储运及装配作业过程的操作效率。
3.现有公开号为cn104495686a的中国专利公开了一种起吊装置,包括顶板,顶板呈矩形结构,其高度在一至两厘米之间,顶板上表面设有连接部,连接部可拆卸安装在顶板上,顶板靠近两侧面处均设有顶梁,顶梁固定在顶板上,顶梁上竖向安装有立柱,立柱与顶梁之间通过固定螺栓连接,顶板对应连接部处安装有千斤顶,千斤顶穿过顶板与连接部之间机械连接,千斤顶底部设有固定件,固定件下表面设有锥钩,锥钩与固定件之间一体连接,锥钩位于一横撑上,横撑设置在两立柱之间,横撑下表面对应锥钩处设有固定座,固定座呈矩形结构。
4.针对上述中的相关技术,发明人发现,实际应用中起吊装置的基础结构较高,当运输装置对吊笼进行起吊运输操作时,容易发生吊笼摇晃倾覆使其上放置的物料坠落的情况,存在有运输装置起吊运输过程不稳定的使用缺陷。
技术实现要素:
5.为了使运输装置在运输吊笼的过程中,吊笼不易与运输装置发生相对晃动,本技术提供一种吊笼下料运输装置。
6.本技术提供的一种吊笼下料运输装置采用如下的技术方案:
7.一种吊笼下料运输装置,包括起吊机构,其特征在于:起吊机构下端沿水平方向固设有支撑板,支撑板上沿竖直方向穿设有四根夹持杆,支撑板上沿支撑板的径向开设有滑动槽,相邻滑动槽两两垂直,夹持杆与滑动槽滑动连接。
8.通过采用上述技术方案,起吊机构移动带动支撑板移动,进而实现运输装置对吊笼的运输功能,支撑板使夹持杆之间的位置关系相对固定,夹持杆将需要运输的吊笼夹持起来,使吊笼与支撑板之间的位置相对固定,使运输装置在运输吊笼的过程中,吊笼不易与运输装置发生相对晃动。
9.可选的,所述夹持杆的上端部沿水平方向固设有垂直于夹持杆的夹持齿条,支撑板上转动连接有与夹持齿条啮合连接的夹持齿轮。
10.通过采用上述技术方案,夹持齿轮转动带动夹持齿条移动,夹持齿条使夹持杆沿滑动槽方向移动,使夹持杆对吊笼的移动夹持功能更加完善。
11.可选的,所述支撑板上沿竖直方向设有升降杆,升降杆置于竖直方向移动,升降杆上沿竖直方向固定连接有与夹持齿轮啮合连接的升降齿条。
12.通过采用上述技术方案,升降杆上下移动带动四个升降齿条与之同步移动,升降
齿条带动四个夹持齿轮转动,夹持齿轮进而转动带动夹持齿条与夹持杆沿滑动槽方向移动,实现四个夹持杆的同步夹持功能。
13.可选的,所述支撑板上固设有限位罩,夹持齿轮置于限位罩内,夹持齿条与限位罩滑动连接。
14.通过采用上述技术方案,限位罩使夹持齿轮与夹持齿条的啮合关系更加稳定,同时使夹持齿条在移动过程中不易发生相对偏移。
15.可选的,所述夹持杆上沿水平方向设有定位块,滑动槽的侧壁上沿滑动槽方向开设有定位槽,定位块置于定位槽内移动。
16.通过采用上述技术方案,当夹持杆移动时,定位块与定位槽相对移动,定位块与及定位槽将夹持杆卡接在滑动槽内,使夹持杆在滑动槽内的相对高度保持不变,使夹持杆在夹持过程中不易偏移。
17.可选的,所述定位块呈圆柱形状,定位块与夹持杆转动连接,定位块与定位槽滚动连接。
18.通过采用上述技术方案,当定位块置于定位槽内移动时,圆柱形状的定位块使定位块与定位槽之间的摩擦力减小,使定位块与定位槽之间的相对移动更加顺畅。
19.可选的,所述吊笼的上端面沿竖直方向固设有棱柱形状的导向柱,支撑板的下端开设有导向槽,导向柱与导向槽滑动连接。
20.通过采用上述技术方案,当支撑板移动至吊笼上方时,导向柱与导向槽相对滑动,使夹持杆与吊笼的夹持位置相对固定,便于夹持杆更好地将吊笼夹持起来。
21.可选的,所述夹持杆的上端部与下端部均固设有限位块,吊笼上开设有限位孔,限位块与限位孔滑动连接。
22.通过采用上述技术方案,当夹持杆夹持吊笼时,限位块置于限位孔内,限位块与限位孔实现夹持杆与吊笼之间的卡接结构,进而使夹持杆与吊笼的连接关系更加稳固。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.起吊机构移动带动支撑板移动,进而实现运输装置对吊笼的运输功能,支撑板使夹持杆之间的位置关系相对固定,夹持杆将需要运输的吊笼夹持起来,使吊笼与支撑板之间的位置相对固定,使运输装置在运输吊笼的过程中,吊笼不易与运输装置发生相对晃动;
25.2.升降杆上下移动带动四个升降齿条与之同步移动,升降齿条带动四个夹持齿轮转动,夹持齿轮进而转动带动夹持齿条与夹持杆沿滑动槽方向移动,实现四个夹持杆的同步夹持功能;
26.3.当夹持杆移动时,定位块与定位槽相对移动,定位块与及定位槽将夹持杆卡接在滑动槽内,使夹持杆在滑动槽内的相对高度保持不变,使夹持杆在夹持过程中不易偏移。
附图说明
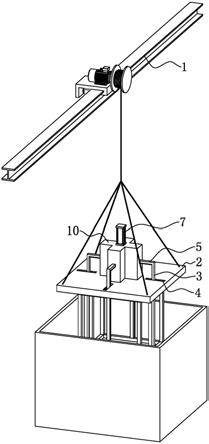
27.图1是本技术实施例的结构示意图。
28.图2是本技术实施例中升降杆和升降齿条的剖视图。
29.图3是图2中a的局部放大图。
30.附图标记说明:1、起吊机构;2、支撑板;3、夹持杆;4、滑动槽;5、夹持齿条;6、夹持
齿轮;7、夹持气缸;8、升降杆;9、升降齿条;10、限位罩;11、定位块;12、定位槽;13、导向柱;14、导向槽;15、限位块;16、限位孔;17、挤压片;18、挤压弹簧。
具体实施方式
31.以下结合全部附图对本技术作进一步详细说明。
32.本技术实施例公开一种吊笼下料运输装置,参照图1,包括起吊机构1,此处起吊机构1为现有技术,不做过多赘述,起吊机构1下端沿水平方向固设有长方体形状的支撑板2,支撑板2的上端面呈正方形状,起吊机构1的下端部与支撑板2上端面的四个端点处固定连接。运输装置工作时,起吊机构1移动带动支撑板2移动,起吊机构1与支撑板2之间的连接结构更加稳定,将吊笼置于支撑板2的下方,通过将吊笼与支撑板2连接起来实现运输装置的基本运输起吊功能。
33.参照图1,支撑板2上沿竖直方向穿设有四根完全相同且相互平行的夹持杆3,夹持杆3与支撑板2的相对高度稍大于吊笼的高度,四根夹持杆3分别置于支撑板2上端面四边中线靠近支撑板2四边的端部,夹持杆3沿其所在支撑板2上端面的中线上移动。支撑板2使夹持杆3之间的位置关系相对固定,当运输装置工作时,夹持杆3将需要运输的吊笼夹持起来,使吊笼与支撑板2之间的位置相对固定,使运输装置在运输过程中,吊笼不易与运输装置发生偏移。
34.参照图2和图3,夹持杆3的上端部与下端部沿水平方向固设有两个完全相同的长方体形状的限位块15,吊笼上开设有限位孔16,限位块15与限位孔16滑动连接。当夹持杆3夹持吊笼时,限位块15滑动进入限位孔16内,当夹持杆3将吊笼抬起时,限位块15置于限位孔16内,限位块15与限位孔16相互配合实现夹持杆3与吊笼之间的卡接结构,进而使夹持杆3与吊笼的连接关系更加稳固。
35.参照图2和图3,限位孔16内沿水平方向固设有挤压弹簧18,挤压弹簧18靠近限位块15的一端沿竖直方向固设有方形状的挤压片17,当限位块15与限位孔16滑动连接时,挤压片17于限位块15抵接。当限位块15置于限位孔16内时,限位块15挤压挤压片17使挤压弹簧18发生弹性形变,当限位块15从限位孔16内滑出时,挤压弹簧18复原使挤压片17将限位块15从限位槽内推出,使限位块15与限位孔16之间的滑动连接关系更加完善。
36.参照图1和图2,吊笼的上端面沿竖直方向固设有六棱柱形状的导向柱13,支撑板2下端面的中心位置上开设有导向槽14,导向柱13与导向槽14滑动连接。当支撑板2沿竖直方向移动至吊笼上方时,导向柱13插入导向槽14内,随支撑板2下移,导向柱13与导向槽14相对滑动,进而使夹持杆3与吊笼的夹持位置相对固定,便于夹持杆3更好地将吊笼夹持起来。
37.参照图1和图2,支撑板2上沿支撑板2的径向开设有滑动槽4,相邻滑动槽4两两垂直,夹持杆3与滑动槽4滑动连接。当夹持杆3移动时,滑动槽4对夹持杆3的移动轨迹起限位作用,滑动槽4使夹持杆3更好地置于所需轨迹上移动,便于夹持杆3将吊笼夹持起来。
38.参照图1和图2,夹持杆3靠近滑动槽4的侧壁上沿水平方向设有两个位置相对且形状相同的定位块11,滑动槽4的侧壁上沿滑动槽4方向开设有定位槽12,当夹持杆3与滑动槽4相对滑动时,定位块11置于定位槽12内移动。当夹持杆3移动时,定位块11与定位槽12相对移动,定位块11与及定位槽12将夹持杆3卡接在滑动槽4内,使夹持杆3在滑动槽4内的相对高度保持不变,使夹持杆3在夹持过程中不易偏移。
39.参照图1和图2,定位块11呈圆柱形状,定位块11与夹持杆3转动连接,定位块11与定位槽12滚动连接。当夹持杆3置于滑动槽4内移动时,定位块11置于定位槽12内滚动,圆柱形状的定位块11使定位块11与定位槽12之间的滑动摩擦力变为滚动摩擦力,通过减小摩擦力,使定位块11与定位槽12之间的相对移动更加顺畅。
40.参照图1和图2,夹持杆3的上端部沿水平方向固设有垂直于夹持杆3的夹持齿条5,支撑板2的上端面沿竖直方向转动连接有与夹持齿条5啮合连接的夹持齿轮6。当夹持杆3需要夹持吊笼时,夹持齿轮6转动带动夹持齿条5移动,夹持齿条5进而带动夹持杆3沿滑动槽4方向移动,使夹持杆3之间的距离调节功能更加简便,进而使夹持杆3对吊笼的移动夹持功能更加完善。
41.参照图1和图2,支撑板2上沿竖直方向设有呈四棱柱形状的升降杆8,升降杆8置于竖直方向移动,升降杆8上沿竖直方向固定连接有与分别与四个夹持齿轮6啮合连接的四个升降齿条9,相邻升降齿条9之间相互垂直。当改变夹持杆3之间距离时,使升降杆8上下移动带动四个升降齿条9与之同步升降,升降齿条9带动与其啮合的四个夹持齿轮6转动,夹持齿轮6进而转动带动夹持齿条5与夹持杆3沿滑动槽4方向移动,使四个夹持杆3之间的距离同步变大或是同步减小,实现四个夹持杆3的同步夹持功能。
42.参照图1和图2,支撑板2上沿竖直方向固设有限位罩10,限位罩10的横截面呈十字形状,四个夹持齿轮6均置于限位罩10内。当夹持齿轮6与夹持齿条5相对移动时,限位罩10使夹持齿轮6与夹持齿条5的啮合关系更加稳定。
43.参照图1和图2,限位罩10上开设有伸缩槽,夹持齿条5靠近夹持齿轮6的端部置于限位罩10内且与伸缩槽滑动连接。当夹持齿条5移动时,伸缩槽限制夹持齿条5的移动轨迹,使夹持齿条5在移动过程中不易发生相对偏移。
44.参照图1和图2,限位罩10上沿竖直方向固设有夹持气缸7,夹持气缸7的输出轴与升降杆8同轴且固定连接。当升降杆8上下移动时,夹持气缸7的输出轴伸缩带动升降杆8升降,进而实现升降杆8的自动升降功能。
45.本技术实施例一种吊笼下料运输装置的实施原理为:运输装置工作时,起吊机构1移动带动支撑板2移动,支撑板2移动至吊笼正上方时,起吊机构1控制支撑板2下降,导向柱13插入导向槽14内,随支撑板2下移,导向柱13与导向槽14相对滑动,当导向柱13与导向槽14卡接后,夹持气缸7输出轴带动升降杆8移动,升降杆8上下移动带动四个升降齿条9与之同步升降,升降齿条9带动与其啮合的四个夹持齿轮6转动,夹持齿轮6进而转动带动夹持齿条5与夹持杆3沿滑动槽4方向移动,实现四个夹持杆3的同步夹持功能,夹持杆3将吊笼夹持在支撑板2底端,使运输装置对吊笼的运输过程更加稳固不易发生相对偏移。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

