1.本发明涉及一种搭载有自动变速器的车辆(以下,称为自动变速车辆),尤其涉及一种 自动驾驶行驶中的自动变速车辆的控制技术、车辆的控制装置、车辆的控制方法及存储介质。
背景技术:
2.在能够自动驾驶的车辆中通过识别本车的行驶状态及周围的状况,可事先计算接下来的 行动并执行。例如,在自动驾驶车辆进行超车行驶的情况下,根据周围的状况作出是否执行 超车的判断,在执行超车的情况下通过加速度计算等执行超车所需要的控制。
3.根据专利文献1中所公开的行驶控制装置,在自动驾驶车辆进行超车行驶的情况下,根 据后方车辆的行驶状态判断是执行超车还是不执行超车,并在后方车辆接近的情况下事先计 算需要何种程度的加速行驶,来进行适当的行驶控制。
4.[现有技术文献]
[0005]
[专利文献]
[0006]
[专利文献1]日本专利特开2019
‑
119303号公报
技术实现要素:
[0007]
[发明所要解决的问题]
[0008]
在自动变速车辆中,当在自动驾驶过程中增加要求驱动力时或者有下坡时等,存在需要 降档的情况。在如上文所述需要超车的加速的情况下,要求大的驱动扭矩,因此可执行降档。 另外,为了在下坡时使车速一定,也存在执行降档的情况。但是,当在短时间内进行此种变 速时,驱动扭矩会急剧地增大,所谓的变速冲击变大。此种变速冲击会对乘员给予违和感, 有导致乘坐舒适度的劣化之虞。另外,也存在发动机转速因降档而大幅变化的情况,也存在 所述声音的大的变化对乘员给予违和感的情况。
[0009]
一般而言,在自动驾驶控制中,并非乘员自己驾驶车辆,因此乘员对加减速时的发动机 或变速器的动作所引起的车辆的振动、噪音或者变速冲击等违和感更敏感。因此,特别是在 自动驾驶时,需要比手动驾驶时更高的振动、噪音的减低性能(噪音与振动(noise vibration, nv)减低性能)及变速冲击的减低对策。
[0010]
本发明的目的在于提供一种车辆的控制装置、车辆的控制方法及存储介质,其当在自动 驾驶过程中预测到要求驱动力的增加时,可减低由降档引起的振动、噪音及变速冲击。
[0011]
[解决问题的技术手段]
[0012]
根据本发明的第一实施例的车辆的控制装置,是一种搭载有自动变速器且能够进行自动 地控制车辆1的至少加减速的自动驾驶控制的车辆1的控制装置100,其中,当在实施所述自 动驾驶控制的过程中预测到要求驱动力的增加时,在所述要求驱动力的增加时机之前,维持 或者减少所述车辆1的车速,同时在所述要求驱动力的增加时机之前的待机
期间内使发动机 的转速上升,根据所述发动机转速的上升使所述发动机的扭矩下降,使所述自动变速器的变 速档向下方换档。
[0013]
根据本发明的第二实施例的车辆的控制方法,是一种搭载有自动变速器且能够进行自动 地控制车辆1的至少加减速的车辆1的控制方法,其中,当在实施所述自动驾驶控制的过程 中预测到要求驱动力的增加时,在所述要求驱动力的增加时机之前,维持或者减少所述车辆1 的车速,同时在所述要求驱动力的增加时机之前的待机期间内使所述发动机的转速上升,根 据所述发动机转速的上升使所述发动机的扭矩下降,使所述自动变速器的变速档向下方换档。
[0014]
根据本发明的第三实施例的存储介质,其存储的程序使处理器作为搭载有自动变速器且 能够进行自动地控制车辆1的至少加减速的自动驾驶控制的车辆1的控制装置100发挥功能, 且所述程序利用所述处理器实现以下功能:当在实施所述自动驾驶控制的过程中预测到要求 驱动力的增加时,在所述要求驱动力的增加时机之前,维持或者减少所述车辆1的车速,同 时在所述要求驱动力的增加时机之前的待机期间内使所述发动机的转速上升,根据所述发动 机转速的上升使所述发动机的扭矩下降,使所述自动变速器的变速档向下方换档。
[0015]
由此,在待机期间中发动机转速上升,发动机扭矩下降,变速档降档,因此,可大幅度 地缓和实际上使驱动力增加时的发动机转速的急剧的上升及变速冲击引起的违和感。
[0016]
理想的是所述发动机转速的上升是在比所述待机期间短且比通常的变速时间长的期间执 行。由此,在超车控制待机过程中发动机转速慢慢地上升,因此难以被乘员注意。
[0017]
在中止了所述要求驱动力增加的情况下,通过使所述自动变速器的变速档向上方换挡来 降低至此为止所上升的所述发动机的转速。此时,理想的是所述自动变速器的变速档向上方 的换挡是以所述发动机的转速的下降成为比上升时小的变化量的方式进行。当要求驱动力的 增加被中止时,发动机转速逐渐下降,其下降变化量比上升时小,因此难以被乘员注意。
[0018]
理想的是在超车时需要增加所述要求驱动力,在当执行所述超车时有与超车车道的前方 或者后方的车辆发生碰撞的可能性的情况下,使所述超车控制待机,直至能够进行所述超车 为止。由此,在待机期间中发动机转速上升,发动机扭矩下降,变速档降档,因此,可大幅 度地缓和实际上执行超车时的发动机转速的急剧的上升及变速冲击所引起的违和感。
[0019]
[发明的效果]
[0020]
如以上所述,根据本发明,当在自动驾驶过程中预测到要求驱动力的增加时可减低由降 档引起的振动、噪音及变速冲击。
附图说明
[0021]
图1是与基于本发明一实施方式的车辆的控制装置中的自动驾驶控制相关的功能结构图。
[0022]
图2是示意性地表示使用了基于本发明第一实施例的控制装置的自动变速车辆(多档变 速车辆)的内部结构的一例的框图。
[0023]
图3是为了说明图2所示的自动变速车辆的控制方法而示出超车行驶的顺序的示
意图。
[0024]
图4是表示基于图2所示的自动变速车辆的控制方法的加速待机及加速执行时的控制的 流程图。
[0025]
图5的(a)~图5的(f)是例示基于图2所示的自动变速车辆的控制方法的加速待机时 及加速执行时的一档换档的控制状态的波形图。
[0026]
图6的(a)~图6的(f)是例示基于图2所示的自动变速车辆的控制方法的加速待机时 及加速执行时的多档换档的控制状态的波形图。
[0027]
图7是表示基于图2所示的自动变速车辆的控制方法的下坡预测及下坡控制时的控制的 流程图。
[0028]
图8的(a)~图8的(e)是例示基于图2所示的自动变速车辆的控制方法的下坡预测及 下坡控制时的控制状态的波形图。
[0029]
图9是示意性地表示使用了基于本发明第一实施例的控制装置的自动变速车辆(无级变 速车辆)的内部结构的一例的框图。
[0030]
图10的(a)~图10的(f)是表示基于图9所示的自动变速车辆的控制方法的加速待机 及加速执行时的控制的流程图。
[0031]
图11的(a)~图11的(f)是例示基于图9所示的自动变速车辆的控制方法的加速中止 时的控制状态的波形图。
[0032]
图12的(a)~图12的(f)是表示用于说明基于图9所示的自动变速车辆的控制方法的 橡胶皮带(rubber band)抑制效果的、加速待机时及加速执行时的控制状态的波形图。
[0033]
图13的(a)~图13的(e)是例示基于图9所示的自动变速车辆的控制方法的下坡预测 及下坡控制时的控制状态的波形图。
[0034]
[符号的说明]
[0035]
1:车辆
[0036]
100:车辆控制装置
[0037]
110:自动驾驶控制部
[0038]
120:行驶控制部
[0039]
eg:发动机(内燃机)
[0040]
tm:有级自动变速器
[0041]
cvt:无级变速器
具体实施方式
[0042]
1.实施方式的概要
[0043]
在搭载有自动变速器的车辆中,当在自动驾驶过程中需要驱动力之前有时间时,在要求 驱动力的增加时机之前的规定的期间内将驱动力及车速维持为一定,使发动机转速上升,根 据所述转速的上升使发动机扭矩下降,将变速档降档。由此,可大幅度地缓和实际上使驱动 力增加时的发动机转速的急剧的上升及变速冲击所引起的违和感。
[0044]
以下,参照图1及图2对作为本发明的前提的自动驾驶控制及自动变速车辆的一例进行 说明,接下来对本发明的实施方式进行详细说明。
[0045]
2.自动驾驶控制
[0046]
如图1所例示,车辆1是二轮、三轮或者四轮等的汽车,且在本实施方式中,如后所述, 是包括自动变速器的车辆。但是,自动驾驶控制的应用可为将柴油发动机、汽油发动机等作 为驱动源的汽车,也可为使用从二次电池、氢燃料电池、金属燃料电池、酒精燃料电池等获 得的电力来驱动马达的电动汽车。
[0047]
<车辆的装置结构>
[0048]
在车辆1上,除了进行包含自动驾驶控制的车辆控制的车辆控制装置100以外,还搭载 有以下的装置、机器群组。
[0049]
·
用于从车辆1的外部取入各种信息的部件(包括外部状况获取部12、路径信息获取部13、 行驶状态获取部14等,其他按钮、拨号盘式开关、图形用户接口(graphical user interface, gui)开关等)、
[0050]
·
操作器件(油门踏板70、刹车踏板72、转向盘74、切换开关80等),
[0051]
·
操作检测传感器(检测油门踏板70的油门开度的油门开度传感器71、检测刹车踏板72 的踏量的刹车踏量传感器(刹车开关)73、检测转向盘74的操舵角的转向操舵角传感器(或 转向扭矩传感器)75)、
[0052]
·
报告装置(输出部)82、
[0053]
·
用于进行车辆1的驱动或操舵的装置(行驶用驱动力输出装置(驱动装置)90、转向装 置92、刹车装置94)及
[0054]
·
将这些装置或机器连接的通信线及网络(控制器局域网(controller area network,can)、 无线通信网等)。
[0055]
外部状况获取部12以获取车辆1的外部状况,例如行驶路的车道或车辆周边的物体等车 辆周边的环境信息的方式构成,例如包括:各种相机(单眼相机、立体相机、红外线相机等) 或各种雷达(毫米波雷达、微波雷达、激光雷达等)等。另外,也可使用将由相机所获得的 信息与由雷达所获得的信息综合的融合传感器(fusion sensor)。
[0056]
路径信息获取部13包含导航装置。导航装置具有全球导航卫星系统(global navigationsatellite system,gnss)接收机、地图信息(导航地图)、作为用户接口发挥功能的触摸屏式 显示装置、扬声器、麦克风等。导航装置通过gnss接收机来确定车辆1的位置,并导出从 所述位置至由用户所指定的目的地为止的路径。由导航装置所导出的路径作为路径信息144 而存储在存储部140中。车辆1的位置也可通过利用行驶状态获取部14的输出的惯性导航系 统(inertial navigation system,ins)来确定或补充。另外,在车辆控制装置100正在执行手 动驾驶控制的情况下,导航装置通过声音或导航显示来对至目的地的路径进行引导。再者, 用于确定车辆1的位置的结构也可独立于导航装置来设置。另外,导航装置例如也可通过用 户所持有的智能手机或平板终端等终端装置的一功能来实现。在此情况下,在终端装置与车 辆控制装置100之间,通过利用无线或有线的通信来进行信息的收发。
[0057]
行驶状态获取部14以获取车辆1的当前的行驶状态的方式构成。行驶状态获取部14包 括:行驶位置获取部26、车速获取部28、横摆率(yaw rate)获取部30、操舵角获取部32、 以及行驶轨道获取部34。
[0058]
行驶位置获取部26以获取作为行驶状态之一的车辆1的行驶位置及车辆1的姿势(行进 方向)的方式构成。行驶位置获取部26包括各种定位装置,例如接收从卫星或路上装
置所发 送的电磁波来获取位置信息(纬度、经度、高度、坐标等)的装置(全球定位系统(globalpositioning system,gps)接收机、gnss接收机、信标(beacon)接收机等)、陀螺仪传感器、 加速度传感器等。车辆1的行驶位置是以车辆1的特定部位为基准来测定。
[0059]
车速获取部28以获取作为行驶状态之一的车辆1的速度(以下,称为车速)的方式构成。 车速获取部28例如包括设置在一个以上的车轮的速度传感器等。
[0060]
横摆率获取部30以获取作为行驶状态之一的车辆1的横摆率等的方式构成。横摆率获取 部30例如包括横摆率传感器等。
[0061]
操舵角获取部32以获取作为行驶状态之一的操舵角的方式构成。操舵角获取部32例如 包括设置于转向轴(steering shaft)的操舵角传感器等。此处,根据所获取的操舵角,也获取 操舵角速度及操舵角加速度。
[0062]
行驶轨道获取部34以获取作为行驶状态之一的车辆1的实际行驶轨道的信息(实际行驶 轨道)的方式构成。实际行驶轨道包含车辆1实际上已行驶的轨道(轨迹),也可包含即将行 驶的预定的轨道,例如已行驶的轨道(轨迹)的行进方向前侧的延长线。行驶轨道获取部34 包括存储器。存储器存储实际行驶轨道中所包含的一连串的点列的位置信息。另外,延长线 可通过计算机等来预测。
[0063]
作为操作检测传感器的油门开度传感器71、刹车踏量传感器73及转向操舵角传感器75 将作为检测结果的油门开度、刹车踏量及转向操舵角分别输出至车辆控制装置100。
[0064]
切换开关80是由车辆1的乘员来操作的开关。切换开关80接受乘员的操作,并根据已 接受的操作内容切换驾驶模式(例如,自动驾驶控制及手动驾驶控制)。切换开关80根据乘 员的操作内容,生成指定车辆1的驾驶模式的驾驶模式指定信号,并将其输出至车辆控制装 置100。
[0065]
另外,车辆1包括通过驾驶者经由换档杆(shift lever)来操作的换档装置60。在换档装 置60中的换档杆(未图示)的位置上,如图1所示,例如有p(停车)、r(后退行驶)、n(空 档)、d(自动变速模式(普通模式)中的前进行驶)、s(运动模式中的前进行驶)等。在换 档装置60的附近设置换档位置传感器205。换档位置传感器205检测由驾驶者操作的换档杆 的位置。车辆控制装置100输入由换档位置传感器205所检测到的档位的信息。
[0066]
另外,本实施方式的车辆1包括设置于转向盘74附近的桨式开关65。桨式开关65包括: 用于在手动驾驶时(手动驾驶模式)的手动变速模式(手动模式)下指示降档的
‑
开关(负按 钮)66、以及用于在手动变速模式下指示升档的 开关(正按钮)67。在手动驾驶模式下的自 动变速器tm的手动变速模式下,这些负按钮66及正按钮67的操作信号被输出至电子控制 单元(车辆控制装置)100,根据车辆1的行驶状态等,利用自动变速器tm进行所设定的变 速档的升档或降档。再者,在本实施方式中,在手动驾驶时,例如,当换档杆的位置在d量 程或s量程设定自动变速模式时,当由驾驶者操作任一桨式开关66、桨式开关67时,从自动 变速模式切换为手动变速模式(手动模式)。另外,在自动驾驶时,对桨式开关65的操作赋 予以下详细说明的功能(与手动驾驶时不同的功能)。
[0067]
报告装置82是可输出各种信息的装置或者机器群组。报告装置82例如向车辆1的乘员 输出用于催促从自动驾驶控制朝手动驾驶控制的转变的信息。作为报告装置82,例如可使用 扬声器、振动器、显示装置、发光装置等中的至少一个。
[0068]
乘员识别部15例如包括可对车辆1的车室内进行拍摄的车内相机。所述车内相机
例如可 为利用电荷耦合器件(charge coupled device,ccd)或互补金属氧化物半导体(complementarymetal oxide semiconductor,cmos)等固体摄像元件的数字相机、或与近红外光源进行了组 合的近红外相机等。车辆控制装置100可获取由乘员识别部15(车内相机)所拍摄的图像, 并根据图像中所包含的车辆1的驾驶者的脸的图像,识别当前的车辆1的驾驶者。
[0069]
如图2所例示,行驶用驱动力输出装置(驱动装置)90包括作为驱动源的内燃机(发动 机)eg、以及经由带有锁止离合器(lock
‑
up clutch)的变矩器tc而与发动机eg连结的自动 变速器tm,进而包括控制发动机eg的燃料喷射(fueling injection,fi)
‑
电子控制单元(electronic control unit,ecu)4、以及控制自动变速器tm的自动变速器(automatictransmission,at)
‑
ecu 5。在行驶用驱动力输出装置90包括发动机eg及自动变速器tm而 构成的情况下,fi
‑
ecu 4及at
‑
ecu 5按照从图1所示的后述的行驶控制部120输入的信息, 使发动机eg的节气门开度或自动变速器tm的换档档等相互协调而进行控制,来控制用于车 辆1行驶的行驶驱动力(扭矩)。
[0070]
转向装置92例如包括电动马达。所述电动马达例如使力作用于齿条与齿轮(rack andpinion)机构来变更转舵轮的方向。转向装置92按照从行驶控制部120输入的信息,驱动电 动马达来变更转舵轮的方向。
[0071]
刹车装置94例如是电动伺服刹车装置,所述电动伺服刹车装置包括:刹车卡钳、朝刹车 卡钳中传递液压的汽缸、使汽缸中产生液压的电动马达、以及控制汽缸及电动马达来控制刹 车卡钳的制动的制动控制部。电动伺服刹车装置为制动力输出装置,且所述制动控制部按照 从行驶控制部120输入的信息来控制电动马达,并以输出对应于制动操作的制动力的刹车扭 矩被输出至各车轮中的方式进行控制。电动伺服刹车装置可包括将通过刹车踏板72的操作所 产生的液压经由主汽缸而传递至汽缸中的机构作为备用元件。再者,刹车装置94并不限定于 以上所说明的电动伺服刹车装置,也可为电子控制式液压刹车装置。电子控制式液压刹车装 置按照从行驶控制部120输入的信息来控制致动器,并将主汽缸的液压传递至汽缸中。
[0072]
<控制装置>
[0073]
接着,对车辆控制装置100进行说明。车辆控制装置100包括:自动驾驶控制部110、行 驶控制部120及存储部140。自动驾驶控制部110的各部及行驶控制部120的一部分或全部是 通过中央处理器(central processing unit,cpu)等处理器执行程序来实现。另外,它们中的 一部分或全部也可通过大规模集成电路(large scale integration,lsi)或专用集成电路 (application specific integrated circuit,asic)等硬件来实现。另外,存储部140通过只读存 储器(read only memory,rom)或随机存取存储器(random access memory,ram)、硬 盘驱动器(hard disk drive,hdd)、闪速存储器等来实现。处理器所执行的程序可事先存储 于存储部140中,也可经由车载互联网设备等而从外部装置下载。另外,程序也可通过将存 储有此程序的可携式存储介质安装于未图示的驱动装置中而安装于存储部140中。另外,车 辆控制装置100也可通过多个计算机装置来分散化。由此,可针对车辆1的车载计算机,使 上文所述的硬件功能部与包含程序等的软件协动来实现本实施方式中的各种处理。
[0074]
存储部140存储地图信息142、路径信息144以及行动计划信息146。
[0075]
地图信息142例如为精度比路径信息获取部13所具有的导航地图高的地图信息,包含车 道的中央的信息或车道的边界的信息等。更具体而言,在地图信息142中包含道路信息或交 通管制信息、住址信息(住址/邮政编码)、设施信息、电话号码信息等。在道路信息中包含表 示高速道路、收费道路、国道、都道府县道路等道路的类别的信息,或道路的车道数、各车 道的宽度、道路的坡度、道路的位置(包含经度、纬度、高度的三维坐标)、车道的转弯处的 曲率、车道的合流及分流点的位置、设置于道路上的标识等信息。在交通管制信息中包含车 道因工程或交通事故、拥堵等而被封锁等信息。
[0076]
路径信息144是存储于存储部140中的一元素,且例如是通过构成路径信息获取部13的 导航装置的gnss接收机来确定车辆1的位置,从所述位置导出至由用户指定的目的地的路 径。
[0077]
行动计划信息146是存储于存储部140中的一元素,且是表示根据路径信息获取部13所 获取的地图信息,自动驾驶控制部110的行动计划生成部116所生成的行动计划的信息。
[0078]
自动驾驶控制部110包括:本车位置识别部112、外界识别部114、行动计划生成部116 以及目标行驶状态设定部118。
[0079]
自动驾驶控制部110按照来自切换开关80的信号的输入,切换驾驶模式来进行控制。作 为驾驶模式,有自动地控制车辆1的加减速及操舵的自动驾驶模式(自动驾驶控制)、或根 据对于油门踏板70或刹车踏板72等操作器件的人为操作来控制车辆1的加减速,并根据对 于转向盘74等操作器件的人为操作来控制操舵的手动驾驶模式(手动驾驶控制),但并不限 定于此。作为其他驾驶模式,例如也可包含自动地控制车辆1的加减速及操舵中的一者,并 根据对于操作器件的人为操作来控制另一者的半自动驾驶模式(半自动驾驶控制)。
[0080]
本车位置识别部112根据存储部140中所存储的地图信息142,以及从外部状况获取部 12、路径信息获取部13或行驶状态获取部14输入的信息,识别车辆1正在行驶的车道(行 驶车道)及车辆1相对于行驶车道的相对位置。本车位置识别部112例如将车辆1的基准点 (例如重心)的从行驶车道中央的偏离、及车辆1的行进方向的相对于连接行驶车道中央的 线形成的角度作为车辆1相对于行驶车道的相对位置来识别。再者,作为替代,本车位置识 别部112也可将车辆1的基准点相对于本车道的任一侧端部的位置等作为车辆1相对于行驶 车道的相对位置来识别。
[0081]
外界识别部114根据从外部状况获取部12等输入的信息,识别周边车辆的位置及速度、 加速度等状态。本实施方式中的周边车辆是指在车辆1的周边行驶的其他车辆,且为朝与车 辆1相同的方向行驶的车辆。再者,特别是本实施方式中的周边车辆是指车辆1要超过的前 方车辆及要超过车辆1的后方车辆。周边车辆的位置可由车辆1的重心或角等代表点表示, 也可由利用车辆1的轮廓来表达的区域表示。周边车辆的“状态”也可包含是否正在根据所述各 种机器的信息,进行周边车辆的加速度变更、车道变更(或者是否正要进行车道变更)。另外, 除周边车辆以外,外界识别部114也可识别护栏或电线杆、停车车辆、行人等其他物体的位 置。
[0082]
行动计划生成部116设定自动驾驶的开始地点、自动驾驶的结束预定地点、和/或自动驾 驶的目的地。自动驾驶的开始地点可为车辆1的当前位置,也可为由车辆1的乘员进
行了指 示自动驾驶的操作的地点。
[0083]
行动计划生成部116所生成的行动计划例如包含针对下一行驶的道路的规定的各地点依 次执行的多个事件。在事件中,例如包括:使车辆1减速的减速事件或使车辆1加速的加速 事件、使车辆1以不脱离行驶车道的方式行驶的车道保持事件、变更行驶车道的车道变更事 件、使车辆1超过前行车辆的超车事件、在分流点变更成所期望的车道或使车辆1以不脱离 当前的行驶车道的方式行驶的分流事件、在用于朝主干道合流的合流车道上使车辆1加减速 并变更行驶车道的合流事件等。
[0084]
目标行驶状态设定部118以如下方式构成:根据由行动计划生成部116所决定的行动计划 与由外部状况获取部12、路径信息获取部13及行驶状态获取部14所获取的各种信息,设定 车辆1的作为目标的行驶状态即目标行驶状态。目标行驶状态设定部118包括目标值设定部 52、目标轨道设定部54、偏差获取部42以及修正部44。
[0085]
目标值设定部52以如下方式构成:设定车辆1作为目标的行驶位置(纬度、经度、高度、 坐标等)的信息(也简称为目标位置)、车速的目标值信息(也简称为目标车速)、横摆率的 目标值信息(也简称为目标横摆率)。
[0086]
目标轨道设定部54以如下方式构成:根据由外部状况获取部12所获取的外部状况及由 路径信息获取部13所获取的行驶路径信息,设定车辆1的目标轨道的信息(也简称为目标轨 道)。目标轨道包含每单位时间的目标位置的信息。使车辆1的姿势信息(行进方向)与各目 标位置建立对应。另外,也可使车速、加速度、横摆率、横向加速度、操舵角、操舵角速度、 操舵角加速度等目标值信息与各目标位置建立对应。上文所述的目标位置、目标车速、目标 横摆率、目标轨道是表示目标行驶状态的信息。
[0087]
偏差获取部42以如下方式构成:根据由目标行驶状态设定部118的目标值设定部52及 目标轨道设定部54所设定的目标行驶状态及由行驶状态获取部14所获取的实际行驶状态, 获取目标行驶状态相对于实际行驶状态的偏差。
[0088]
修正部44以对应于由偏差获取部42所获取的偏差,修正目标行驶状态的方式构成。具 体而言,偏差变得越大,修正部44使由目标行驶状态设定部118所设定的目标行驶状态越接 近由行驶状态获取部14所获取的实际行驶状态来设定新的目标行驶状态。
[0089]
行驶控制部120包括加减速指令部56与操舵指令部58,且以控制车辆1的行驶的方式构 成。具体而言,行驶控制部120以使车辆1的实际行驶状态与由目标行驶状态设定部118所 设定的目标行驶状态、或由修正部44所设定的新的目标行驶状态一致或接近的方式将行驶控 制的指令值输出至上文所述的行驶用驱动力输出装置90、转向装置92及刹车装置94。
[0090]
加减速指令部56以进行车辆1的行驶控制中的加减速控制的方式构成。具体而言,加减 速指令部56根据由目标行驶状态设定部118或修正部44所设定的目标行驶状态(目标加减 速度)与实际行驶状态(实际加减速度),对用于使车辆1的行驶状态与目标行驶状态一致的 加减速度指令值进行运算。
[0091]
操舵指令部58以进行车辆1的行驶控制中的操舵控制的方式构成。具体而言,操舵指令 部58根据由目标行驶状态设定部118或修正部44所设定的目标行驶状态与实际行驶状态, 对用于使车辆1的实际行驶状态与目标行驶状态一致的操舵角速度指令值进行运算。
[0092]
3.第一实施例(具有自动变速器的驱动系统)
[0093]
在图2中,概略性地示出车辆1的行驶用驱动力输出装置(驱动装置)90的结构。发动 机eg的旋转被输出至曲柄轴(发动机eg的输出轴)221,并经由变矩器tc而传递至自动 变速器tm的输入轴227。自动变速器tm是有级式的自动变速器,所述有级式的自动变速器 将从发动机eg传递至输入轴227的旋转变速并从输出轴228输出至驱动轮侧,且能够设定前 进行驶用的多个变速档及后退行驶用的一变速档。
[0094]
另外,行驶用驱动力输出装置90包括:fi
‑
ecu(燃料喷射控制装置)4,以电子方式控 制发动机eg;at
‑
ecu(自动变速控制装置)5,以电子方式控制包括变矩器tc的自动变速 器tm;以及液压控制装置6,按照at
‑
ecu 5的控制,对变矩器tc的旋转驱动或锁止控制 及自动变速器tm所包括的多个摩擦卡合机构的接合(卡合)/松开进行液压控制。
[0095]
车辆1包括:曲柄轴转速传感器201、输入轴转速传感器202、及输出轴转速传感器203。 曲柄轴转速传感器201检测曲柄轴221(发动机eg)的转速ne并将所述转速ne输出至at
‑
ecu 5及fi
‑
ecu(燃料喷射控制装置)4。输入轴转速传感器202检测输入轴227的转速(自动变 速器tm的输入轴转速)ni并将所述转速ni输出至at
‑
ecu 5。输出轴转速传感器203检测 输出轴228的转速(自动变速器tm的输出轴转速)no并将所述转速no输出至at
‑
ecu 5。 at
‑
ecu 5根据由各传感器201~传感器203所检测出的转速数据ne、转速数据ni、转速数据 no来算出车速数据。另外,车辆1包括节气门开度传感器206。节气门开度传感器206检测 发动机eg的节气门开度th并将所述节气门开度th的数据输出至fi
‑
ecu 4。
[0096]
另外,控制自动变速器tm的at
‑
ecu 5具有换档映射(变速特性)55,所述换档图(变 速特性)55根据由车速获取部28的车速传感器所检测出的车速与由油门开度传感器71所检 测出的油门开度,决定可由自动变速器tm设定的变速档的区域。换档映射55包含针对各变 速档设定的升档线及降档线,事先准备了特性不同的多种换档映射。在自动变速器tm的变 速控制中,at
‑
ecu 5按照从所述多种换档映射中选择的换档映射进行切换自动变速器tm的 变速档的控制。
[0097]
<自动驾驶控制>
[0098]
在车辆1中,在通过利用驾驶者对切换开关80的操作选择了自动驾驶模式的情况下,自 动驾驶控制部110进行车辆1的自动驾驶控制。在所述自动驾驶控制中,自动驾驶控制部110 根据从外部状况获取部12、路径信息获取部13、行驶状态获取部14等所获取的信息,或者 由本车位置识别部112及外界识别部114所识别的信息,掌握车辆1的当前的行驶状态(实际 行驶轨道或行驶位置等)。目标行驶状态设定部118根据由行动计划生成部116所生成的行动 计划,设定车辆1的作为目标的行驶状态即目标行驶状态(目标轨道或目标位置)。偏差获取 部42获取实际行驶状态相对于目标行驶状态的偏差。行驶控制部120在由偏差获取部42获 取偏差情况下,以使车辆1的行驶状态与目标行驶状态一致或接近的方式进行行驶控制。
[0099]
修正部44根据由行驶位置获取部26所获取的行驶位置来修正目标轨道或目标位置。行 驶控制部120根据由车速获取部28所获取的车速等,进行利用行驶用驱动力输出装置90及 刹车装置94的车辆1的加减速控制,以使车辆1追随新的目标轨道或目标位置。
[0100]
另外,修正部44根据由行驶位置获取部26所获取的行驶位置来修正目标轨道。行驶控 制部120根据由操舵角获取部32所获取的操舵角速度,进行利用转向装置92的操舵控
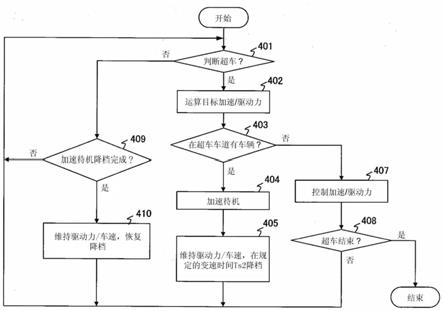
执行加速/驱动力控制(动作407)直至超车结束为止(动作408)。
[0112]
若判断为不执行超车(动作401的否),则车辆控制装置100判断自动驾驶用的降档是 否完成(动作409)。若自动驾驶用降档完成(动作409的是),则车辆控制装置100判断为 中止了加速,以将发动机eg的驱动力及车速v维持为一定的方式使发动机转速ne下降,并 且使发动机扭矩上升,在发动机转速ne成为与变速后的变速比对应的转速时执行升档(动作 410)。另外,在未执行自动驾驶用降档的情况下(动作409的否),重复动作401及动作409 直至下一超车判断为止(动作401的否、动作409的否)。
[0113]
以上,将超车时的控制作为一例进行了说明,但本发明只要是预测驱动力的突然的增加 且至此为止有时间的状况,则可应用。以下,假定一般的情况,参照图5的(a)~图5的(f) 对加速待机后执行加速时的车辆1的状态变化进行说明。
[0114]
4.2)加速待机及加速执行(一档降档)
[0115]
如图5的(a)~图5的(f)所例示,设为在时间点t1作出了加速待机的判断。车辆控 制装置100预先计算所需要的要求驱动力,在从加速待机开始起经过变速时间ts2的期间使 发动机转速ne逐渐上升(c),使发动机扭矩逐渐下降(d)。例如,发动机扭矩可通过降低 节气门开度来下降。即使发动机转速ne上升发动机扭矩也下降,因此,车辆控制装置100 可将车速v及驱动力维持为一定(图5的(b)及图5的(f))。
[0116]
当在时间点t2执行降档时,发动机转速ne与自动变速器tm的变速比处于可执行实际 的加速的状态。因此,当在时间点t3执行实际的加速时,车辆控制装置100使发动机扭矩上 升至目标值为止(d),将加速所需要的驱动力上升至要求值为止(b)。发动机扭矩可通过 提升节气门开度来上升。此时,自动变速器tm的变速比与发动机转速ne均不变化。
[0117]
以往,在时间点t3~时间点t4之间,发动机转速ne在通常的变速时间ts1的期间上升 (图5的(c)的虚线),并执行降档(e)。因此,发动机声音及振动在变速时间ts1突然变 化,成为乘员的大的违和感的原因。与此相对,根据本实施方式,在比通常的变速时间ts1 长的变速时间ts2执行降档。由于变速时间ts2可在加速待机过程中的时间内设定,因此可 更缓慢地使发动机转速ne上升,能够大幅度地减轻以往那样的违和感。
[0118]
4.3)加速待机及加速执行(多档降档)
[0119]
在上文所述的图5的(a)~图5的(f)所例示的控制中,在加速待机过程中执行了一档 的降档,但也存在需要多档换档的情况。以下,作为一例,对从n档向(n
‑
2)档降档两档的 情况进行说明。
[0120]
如图6的(a)~图6的(f)所例示,设为在时间点t1作出了加速待机的判断。车辆控 制装置100预先计算所需要的要求驱动力,在从加待机开始起经过了变速时间ts2的时间点 t2从n档降档至n
‑
1档,继而在经过了变速时间ts2的时间点t3从n
‑
1档降档至n
‑
2档。在 此期间,使发动机转速ne逐渐上升(c),使发动机扭矩逐渐下降(d)。如此,车辆控制装 置100能够以车速v及驱动力维持为一定的方式进行控制(图5的(b)及图5的(f))。
[0121]
在时间点t3降档至n
‑
2档,因此发动机转速ne与自动变速器tm的变速比处于可执行 实际的加速的状态。因此,当在时间点t4开始实际的加速时,车辆控制装置100使发动机扭 矩上升至目标值为止(d),将加速所需要的驱动力上升至要求值为止(b)。此时,自动变 速器tm的变速比与发动机转速ne均不变化。
[0122]
在所述例子中,由于在变速时间ts2的2倍的时间内执行两档降档,因此发动机转
速ne 更缓慢地变化,大幅度地减轻了以往那样的违和感。再者,在所述例子中为两档降档,但也 可为三档以上的降档,且只要在加速待机过程中降档完成至两档为止,则可与所述档数相对 应,减少最后的降档档数,从而可获得同样的效果。
[0123]
另外,发动机eg的输出有时会因环境条件而下降,以往,如由图6的(d)的虚线所示, 当发动机扭矩在时间点t5达到上限时,为了在变速时间ts1执行降档,使发动机转速ne急 剧上升。这会有对乘员给予违和感之虞。与此相对,根据本实施例,由于在加速待机过程中 执行降档,因此可避免此种发动机转速ne的急剧上升。
[0124]
另外,以往,在自动驾驶中,在使用频度高的高速行驶时,有时会产生频繁地重复降档 或升档的换档繁忙状态,根据本实施例,通过预计用于超车的加速执行且事先花一定程度时 间执行多档的降档,也可避免频繁地重复降档的换挡繁忙。
[0125]
4.4)下坡控制
[0126]
基于本实施例的控制方法只要是预测降档的状况则可应用。例如,在根据地图信息识别 为前方有下坡的情况下,通过在到达下坡之前进行上文所述的平稳的变速,可大幅度地减轻 以往那样的违和感。以下,参照图7及图8的(a)~图8的(e)进行说明。
[0127]
在图7中,在预测为前方有下坡的情况下(动作501的“有”),自动驾驶控制部110计算 目标加速度/驱动力(要求驱动力)(动作502),并判断是否应从下坡之前的时间起事前开 始降档(动作503)。若为应开始(动作503的是),则车辆控制装置100在变速时间ts2的 期间,以将车速v维持为一定的方式使发动机转速ne上升至目标值为止,并且使发动机扭 矩下降(动作504),在发动机转速ne成为与变速后的变速比对应的转速时执行降档(动作 505)。如上文所述,变速时间ts2是通过使自动变速器tm内的离合器及变矩器tc的锁止 离合器的接合缓慢,而设定得比通常的变速时间ts1长。然后,在下坡中执行下坡控制(动 作506)。
[0128]
如图8的(a)~图8的(e)所例示,设为在时间点t1作出了下坡预测的判断。车辆控 制装置100预先计算所需要的要求驱动力,在从时间点t1起经过变速时间ts2的期间使发动 机转速ne逐渐上升(b),使发动机扭矩逐渐下降(c)。例如,发动机扭矩可通过降低节气 门开度来下降。即使发动机转速ne上升发动机扭矩也下降,因此,车辆控制装置100能够以 将车速v维持为一定的方式进行控制。
[0129]
当在时间点t2执行降档时,发动机转速ne与自动变速器tm的变速比处于可执行实际 的下坡控制的状态。因此,当在时间点t3成为实际的下坡时,车辆控制装置100执行根据基 于行动计划决定的制动力停止燃料向发动机eg的供给,使发动机刹车作用的燃料切断(fuelcut,fc)控制。此时,自动变速器tm的变速比与发动机转速ne均不变化。
[0130]
以往,在时间点t3~时间点t4之间,发动机转速ne在通常的变速时间ts1的期间上升 (图8的(b)的虚线),并执行降档(d)。因此,发动机声音及振动在变速时间ts1突然 变化,成为乘员大的违和感的原因。与此相对,根据本实施方式,由于在比通常的变速时间 ts1长的变速时间ts2执行降档,因此发动机转速ne更缓慢地变化,大幅度地减轻了以往那 样的违和感。
[0131]
5.第二实施例
[0132]
本发明不仅可应用于搭载有多级变速器的车辆,而且也可应用于搭载有作为无级变速器 (continuously variable transmission,cvt)已知的无级变速器的车辆(无级变
速车辆)。以 下,对基于本发明第二实施例的无级变速车辆进行说明。
[0133]
cvt是将金属带或链条等卷绕构件卷绕于经相向配置的滑轮之间的卷绕式自动变速器。 由于可无级地调整变速比,因此与有级变速器相比,具有可有效利用发动机的功率带的优点, 但也指出被称为橡胶皮带感的驾驶性能(drivability)的劣化。
[0134]
5.1)具有cvt的驱动系统
[0135]
在图9中,概略性地示出基于本实施例的车辆1中的行驶用驱动力输出装置(驱动装置) 90的结构。车辆1包括驱动轮612,作为内燃机的发动机610搭载于车辆1。
[0136]
发动机610的进气系统中所配置的节流阀(未图示)连接于包括电动马达等致动器的线 控驱动(drive by wire,dbw)机构618,并通过dbw机构618进行开闭。
[0137]
由节流阀进行调量的进气通过进气歧管而流动,在各气缸的进气端口附近与从喷射器620 喷射的燃料混合而形成混合气,在进气阀开阀时,流入至所述气缸的燃烧室。在燃烧室中, 混合气被火花塞点火而燃烧,驱动活塞使曲柄轴622旋转之后,成为废气而向发动机610的 外部放出。
[0138]
曲柄轴622的旋转经由变矩器624而输入至cvt 626。即,由利用dbw机构618根据驾 驶者的油门踏板616的操作而调整的节气门开度决定的发动机610的输出轴的旋转经由变矩 器624而输入至cvt 626。
[0139]
发动机610的曲柄轴622连接于变矩器624的泵/叶轮624a。另一方面,与其相向配置并 接受流体(工作油)的涡轮/浇道624b连接于主轴(输入轴)ms。变矩器624包括锁止离合 器624c。
[0140]
cvt 626包括:输入带轮(驱动(drive,dr)带轮)626a,配置于主轴ms;输出带轮 (从动(driven,dn)带轮)626b,与主轴ms平行并且配置于与驱动轮612连结的中间轴 (输出轴)cs;以及环状传递部件、例如金属制的带626c,绕挂于其之间。
[0141]
cvt 626经由前进后退切换机构628而连接于发动机610。前进后退切换机构628包括: 前进离合器628a,能够使车辆1向前进方向行驶;后退刹车离合器628b,能够使车辆1向后 退方向行驶;以及行星齿轮机构628c,配置于其之间。
[0142]
中间轴cs的旋转经由齿轮而从副轴(secondary shaft)(中间轴)ss传递至驱动轮612。 即,中间轴cs的旋转经由齿轮630a、齿轮630b而传递至副轴ss,所述旋转经由齿轮630c 而从差动机构(differential mechanism)632经由驱动轴(drive shaft)634而传递至左右的驱 动轮(仅示出右侧)612。再者,在所述说明书中,将齿轮630a、齿轮630b、齿轮630c总称 为“输出齿轮630”。
[0143]
在包括驱动轮(前轮)612及从动轮(后轮,未图示)的四个车轮附近配置盘式刹车636, 并且在车辆驾驶席地面配置刹车踏板640。
[0144]
在前进后退切换机构628中前进离合器628a与后退刹车离合器628b的切换是通过驾驶 者操作设置于车辆驾驶席的量程选择器644而选择例如p、r、n、d等量程中的任一个来进 行。基于驾驶者的量程选择器644的操作的量程选择被传递至液压供给机构646的手动阀。
[0145]
虽然省略了图示,但液压供给机构646包括:由发动机610驱动而从贮存器(reservoir) 汲取工作油并向油路吐出的液压泵、配置于油路中的各种控制阀以及电磁阀,将调整所吐出 的工作油的压力而获得的液压供给至变矩器624的锁止离合器624c,并
将锁止离合器624c卡 合/开放。
[0146]
另外,液压供给机构646向cvt 626的带轮626a、带轮626b的活塞室供给液压。其结 果,带轮626a、带轮626b之间的带轮宽度发生变化而带626c的卷绕半径发生变化,从而将 发动机610的旋转传递至驱动轮612的变速比(比率)无级地变化。
[0147]
进而,液压供给机构646经由根据由驾驶者操作的量程选择器644的位置而运行的手动 阀将液压供给至前进后退切换机构628的前进离合器628a或后退刹车离合器628b的活塞室, 能够使车辆1向前进方向或者后退方向行驶。
[0148]
在发动机610的凸轮轴(未图示)附近等的适宜位置设置曲柄角传感器650,针对活塞的 各规定曲柄角度位置输出表示发动机转速ne的信号。在进气系统中,在节流阀的下游的适宜 位置设置绝对压力传感器652,输出与进气管内绝对压力(发动机负荷)pba成比例的信号。
[0149]
在dbw机构618的致动器设置有节气门开度传感器654,通过致动器的旋转量输出与节 流阀的开度th成比例的信号。
[0150]
另外,在油门踏板616的附近设置油门开度传感器660并输出与相当于基于油门踏板616 的驾驶者的踏入量(油门踏板操作量)的油门开度ap成比例的信号,并且在刹车踏板640的 附近设置刹车开关662并根据驾驶者的刹车踏板640的操作并输出接通信号。
[0151]
所述曲柄角传感器650等的输出被发送至发动机控制器666。发动机控制器666包括包含 中央处理器(central processing unit,cpu)、只读存储器(read only memory,rom)、随 机存取存储器(random access memory,ram)、输入/输出(input/output,i/o)等的微型 计算机,且根据这些传感器输出来控制dbw机构618的动作,并且控制利用喷射器620进行 的燃料喷射及利用火花塞等进行的点火时期。
[0152]
在主轴ms设置nt传感器(转速传感器)670,输出表示涡轮/浇道624b的转速,具体 而言是主轴ms的转速nt,更具体而言是变速器输入轴转速(及前进离合器628a的输入轴 转速)的脉冲信号。
[0153]
在cvt 626的输入带轮626a附近的适宜位置设置ndr传感器(转速传感器)672并输 出与输入带轮626a的转速ndr,换言之是前进离合器628a的输出轴转速对应的脉冲信号。
[0154]
在输出带轮626b附近的适宜位置设置ndn传感器(转速传感器)674并输出表示输出带 轮626b的转速ndn,具体而言是中间轴cs的转速,更具体而言是变速器输出轴转速的脉冲 信号。
[0155]
另外,在副轴ss的齿轮630b附近设置车速传感器(转速传感器)676并输出表示副轴 ss的转速及旋转方向的脉冲信号(具体而言是表示车速v的脉冲信号)。
[0156]
另外,在所述量程选择器644的附近设置量程选择器开关680,并输出与由驾驶者所选择 的r、n、d等量程对应的信号。
[0157]
在液压供给机构646的油路中配置液压传感器682并输出与向输出带轮626b供给的液压 对应的信号。在贮存器中配置油温传感器684并输出与油温对应的信号。
[0158]
所述nt传感器670等的输出被发送至换档控制器690。换档控制器690也包括包含cpu、 rom、ram、i/o等的微型计算机,并且构成为与发动机控制器666通信自如。
[0159]
换档控制器690根据这些检测值,对液压供给机构646的电磁阀进行励磁、非励磁来控 制前进后退切换机构628、cvt 626以及变矩器624。
[0160]
即,换档控制器690根据基于各种传感器检测、算出的驾驶状态(输入带轮转速ndr、 输入扭矩、车速v等)、将输入带轮626a及输出带轮626b向主轴ms及中间轴cs的轴方向 按压的轴推力、表示主轴ms及中间轴cs相互合作的力的轴间力,按照规定的关系式计算输 出带轮626b与带626c之间的摩擦系数。进而,通过使用所算出的摩擦系数的值进行施加至 输出带轮626b的轴推力的反馈控制,来实现动力传递效率的提高或带626c的磨损抑制。
[0161]
6.控制方法
[0162]
以下,对基于本发明第二实施例的控制方法进行详细说明。基于本实施例的控制方法可 安装于上文所述的cvt车辆1。此处,对超车时的加速/驱动力控制进行说明,但本发明不仅 可应用于超车的情况,而且只要是预想驱动力的突然的增加的状况则可应用。
[0163]
6.1)超车控制
[0164]
在本实施例中,也考虑上文所述的图3的超车场景。根据本实施例,在处于图3中的加 速待机302及加速待机303的状态的期间内,比通常更缓慢地执行cvt的降档。由于如上文 所述自动驾驶过程中是按照行动计划,因此可比通常的变速更缓慢地执行加速待机过程中的 cvt的变速。即,车辆控制装置100以将驱动力及车速维持为一定的方式执行将cvt降档同 时使发动机转速ne逐渐上升,并使发动机扭矩逐渐减少的控制。通过如此进行降档,可抑制 发动机声音及振动的突然变化所引起的乘员的违和感,可如后述那样抑制橡胶皮带感。
[0165]
基于本实施例的控制方法是通过上文所述的车辆控制装置100来实施。其控制功能可通 过在车辆控制装置100的处理器上执行存储器中所存储的程序来实现。基于本实施例的控制 方法可通过与上文所述的图4的流程同样的控制实现,因此省略流程的详细情况。
[0166]
6.2)加速待机及加速执行
[0167]
如图10的(a)~图10的(f)所例示,设为在时间点t1作出了加速待机的判断。车辆 控制装置100预先计算所需要的要求驱动力,以在加速待机过程中将驱动力及车速维持为一 定的方式(b、f)将cvt降档同时使发动机转速ne逐渐上升(c),使发动机扭矩逐渐下降 (d)。例如,发动机扭矩可通过降低节气门开度来下降。如此,车辆控制装置100能够以车 速v及驱动力维持为一定的方式控制cvt、发动机转速ne及发动机扭矩。
[0168]
当在时间点t2执行实际的加速时,车辆控制装置100使发动机转速ne、发动机扭矩及比 率上升至目标值为止,并将加速所需要的驱动力上升至要求值为止。发动机扭矩可通过提升 节气门开度来上升。在时间点t2,cvt的比率降档,发动机转速ne也上升,因此时间点t3 之前的期间的上升幅度均变小。
[0169]
以往,在时间点t2~时间点t3之间降档,发动机转速ne上升(图10的(c)、图10的 (e)的虚线),因此发动机声音及振动在时间点t2~时间点t3之间突然变化,成为乘员的大 的违和感的原因。与此相对,根据本实施方式,由于在加速待机过程中逐渐执行降档,因此 发动机转速ne更缓慢地变化,大幅度地减轻了以往那样的违和感。另外,在时间点t2,cvt 的比率降档,发动机转速ne也上升,因此能够在执行加速时迅速加速。
[0170]
6.3)加速中止
[0171]
如图11的(a)~图11的(f)所例示,设为在时间点t1作出了加速待机的判断,但在 时间点t4判断为加速的中止。在此情况下,由于在时间点t4之前将cvt降档,使发动机转 速
ne上升,使发动机扭矩下降,因此车辆控制装置100以使它们逐渐恢复至原来的方式进行 控制。根据本实施方式,以使发动机转速ne以比上升时的δne
up
小的δne
down
下降的方式 进行升档,以将驱动力及车速维持为一定。通过使发动机转速ne比上升时慢慢地下降,可消 除乘员的违和感。
[0172]
6.4)橡胶皮带感的抑制
[0173]
在图12的(a)~图12的(f)中由虚线所示的现有的控制中,在时间点t2执行加速, 使发动机转速ne及发动机扭矩上升,执行降档。但是,如由图12的(d)的虚线所示,当发 动机扭矩在时间点t3达到上限时,驱动力仅通过比率来补偿。因此,在时间点t3~时间点t4 之间将比率降档而使发动机转速ne上升来进行加速。在所述时间点t3~时间点t4之间,发 动机转速ne的上升比车速v的上升大,产生相对于大的发动机声音而车速不上升那样的感 觉,即橡胶皮带感。
[0174]
与此相对,根据图12的(a)~图12的(f)中由实线所示的本实施例,在加速待机过程 中以无违和感的程度降档,并使发动机转速ne上升,因此可避免仅发动机转速ne急剧上升 那样的橡胶皮带感。
[0175]
6.5)下坡控制
[0176]
基于本实施例的控制方法只要是预测降档的状况则可应用。例如,在根据地图信息识别 为前方有下坡的情况下,通过在到达下坡之前进行上文所述的平稳的变速,可大幅度地减轻 以往那样的违和感。再者,本实施例中的下坡控制的流程基本上与图7所示相同,因此省略 说明,参照图13的(a)~图13的(e)对下坡控制的状态进行说明。
[0177]
如图13的(a)~图13的(e)所例示,设为在时间点t1作出了下坡预测的判断。车辆 控制装置100预先计算所需要的要求驱动力,在时间点t1~时间点t2之间通过降档使发动机 转速ne逐渐上升(b),使发动机扭矩逐渐下降(c)。例如,发动机扭矩可通过降低节气门 开度来下降。即使发动机转速ne上升发动机扭矩也下降,因此,车辆控制装置100能够以将 车速v维持为一定的方式进行控制。
[0178]
当在时间点t2开始下坡控制时,车辆控制装置100执行根据基于行动计划决定的制动力 停止燃料向发动机eg的供给,使发动机刹车作用的燃料切断(fc)控制。此时,cvt的变 速比与发动机转速ne均不大幅变化。
[0179]
以往,在时间点t2~时间点t3之间发动机转速ne上升(图13的(b)的虚线),并执 行降档(d)。因此,发动机声音及振动突然变化,成为乘员的大的违和的原因。与此相对, 根据本实施方式,由于在下坡预测期间执行降档,因此发动机转速ne更缓慢地变化,大幅度 地减轻了以往那样的违和感。
[0180]
7.效果
[0181]
如上文所述,根据本发明的实施方式及实施例,当自动变速车辆在自动驾驶过程中在需 要要求驱动力的变化时机之前有时间时,通过在所述变化时机之前的期间内执行使车速一定 同时使发动机转速逐渐上升,使发动机扭矩逐渐下降的降档,可减低实际上要求驱动力变化 时的降档所引起的振动、噪声及变速冲击。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
