1.本发明属于车辆控制技术领域,具体涉及一种基于起步场景的动力控制方法、系统、车辆及存储介质。
背景技术:
2.智能化是汽车变革的重要趋势,消费者对于动力输出控制差异化的需求日益高涨。不同使用场景下,用户对于车辆的动力述求是变化的。比如在红绿灯路口起步,当车辆处于堵车工况时,用户对于动力的输出期望低,需要保持对车辆良好的控制性,而在通畅工况时或者车辆处于路口头排位置,用户对于动力输出的期望高,希望尽快提速至当前道路的合理车速。而实际情况,用户通常通过油门操作来适应不同场景的需求,但是这种操作多数情况是用户预期之外的附加操作,并不能形成对于车辆一贯的体验。实际的动力输出不匹配用户的场景需求。
3.因此,有必要开发一种新的基于起步场景的动力控制方法、系统、车辆及存储介质。
技术实现要素:
4.本发明的目的是提供一种基于起步场景的动力控制方法、系统、车辆及存储介质,能实现对不同起步场景的精确识别,并自动切换相应场景的动力模式。
5.第一方面,本发明所述的一种基于起步场景的动力控制方法,包括以下步骤:
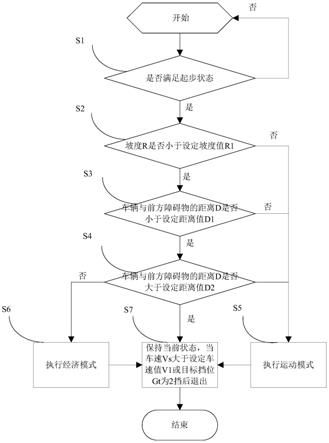
6.s1.判断车辆是否满足起步状态,若满足起步状态,进入步骤s2,否则继续执行步骤s1;
7.s2.计算车辆所在位置的坡度r,并判断坡度r是否小于设定坡度值r1,若是,则进入步骤s3,若否,则认为当前车辆所处场景为坡道起步场景,进入步骤s5;
8.s3.计算车辆与前方障碍物的距离d,并判断距离d是否小于设定距离值d1,若是,则进入步骤s4,若否,则认为当前车辆所处场景为畅通起步场景,进入步骤s5;
9.s4.判断距离d是否大于设定距离值d2,若是,则进入步骤s7,若否,则认为当前车辆所处场景为堵车起步场景,进入步骤s6;
10.s5.车辆执行运动模式,并进入步骤s7;
11.s6.车辆执行经济模式,并进入步骤s7;
12.s7.保持当前模式,并在检测到车速vs大于设定车速值v1或目标挡位gt为2挡后,退出状态保持,起步控制结束。
13.可选地,所述步骤s1具体为:
14.获取换挡位置st、油门开度ap、车速vs和刹车状态br;
15.当换挡位置st处于d挡或者n挡,油门开度ap为零,车速vs为零,且刹车状态br为on,则判断为满足起步状态,否则判断为不满足起步状态。
16.第二方面,本发明所述的一种基于起步场景的动力控制系统,包括存储器和控制
器,所述存储器内存储有计算机可读程序,所述控制器调用该计算机可读程序时能执行如本发明所述的基于起步场景的动力控制方法的步骤。
17.第三方面,本发明所述的一种车辆,采用如本发明所述的基于起步场景的动力控制系统。
18.第四方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本发明所述的基于起步场景的动力控制方法的步骤。
19.本发明具有以下优点:在车辆处于起步状态时,充分利用加速度传感器和雷达信号对起步的场景进行更精确地识别,并自动切换相应场景的动力模式,进而满足用户在不同使用场景差异化的需求,提升了驾驶乐趣。本方法简单,且没有硬件成本,仅需更改动力总成控制逻辑即可实现该功能。
附图说明
20.图1为本实施例的逻辑流程图;
21.图2为本实施例中各模式效果的示意图;
22.图3为本实施例中经济模式下发动机扭矩特性的示意图;
23.图4为本实施例中动力模式下发动机扭矩特性的示意图;
24.图5为本实施例中畅通起步场景的示意图;
25.图6为本实施例中堵车起步场景的示意图;
26.图7为本实施例中坡道起步场景的示意图。
具体实施方式
27.下面结合附图对本发明作进一步说明。
28.如图1所示,一种基于起步场景的动力控制方法,包括以下步骤:
29.s1.控制器获取换挡位置st、油门开度ap、车速vs和刹车状态br,并基于换挡位置st、油门开度ap、车速vs和刹车状态br来判断车辆是否处于起步状态,具体如下:
30.当换挡位置st处于d挡或者n挡,油门开度ap为零,车速vs为零,且刹车状态br信号为on,则判断为起步状态,并进入步骤s2,否则判断为不满足起步状态,则继续执行步骤s1。
31.s2:控制器通过整车自带的底盘加速度信号计算出坡度值r,当计算出的坡度值r小于设定坡度值r1时(r1一般推荐为5%),则执行步骤s3,即对起步路况信息进行进一步判断,否则识别为坡道起步场景,进入步骤s5。
32.本实施例中,坡度值r的计算公式为:
33.θ为当前坡道的实际角度,一般的实际道路中θ值比较小,当θ较小时,可以认为sinθ≈tanθ=r,因此坡度值r可以通过车辆的加速度进行大致精准的计算,具体为其中σ为车辆旋转质量换算系数,为车辆固有参数,g为重力加速度,a1为车辆平路行驶加速度,a2为车辆当前的实际加速度。由于起步时车辆处于静止状态,采用这个计算方法的实际坡度值较为精确。
34.s3.控制器通过雷达信号计算车辆与前方障碍物的距离d,通过对于距离的识别,对当前场景再次进行一次判断,当距离d大于等于设定距离值d1时,则认为前方道路较为通
畅或处于红绿灯路口第一辆车位置,即当前车辆所处场景为畅通起步场景,执行步骤s5。当距离d小于设定距离值d1时,则进入步骤s4。
35.s4.判断当前方障碍物的距离d是否大于设定距离值d2,若距离d大于设定距离值d2,则进入步骤s7(车辆最开始处于用户手动选择的模式之一,普通、运动和经济模式这三者中的一种),若否,则认为当前车辆所处场景为堵车起步场景(即认为前方道路拥堵或前方有车辆等待起步,此时用户对于动力的需求为经济且车速更可控),进入步骤s6.
36.s5.控制进入动力模式,并进入步骤s7。
37.s6.执行经济模式,并进入步骤s7。
38.s7.保持当前模式不变。本实施例中,当控制器完成场景识别并控制进入相应的模式之后,会对当前模式进行保持,当车速vs大于设定车速值v1或者目标挡位gt为2挡后,退出状态保持,起步控制流程结束。其中设定车速值v1会根据不同的油门进行设置,通常小油门的设定车速值v1小于大油门的设定车速值,但总体呈线性关系,此步骤的目的为让整个起步过程更加连续可控,同时兼顾不同油门下用户不同的加速期望。
39.如图2至图4所示,本实施例中,当在动力模式中,相同油门下,扭矩输出更大,同时扭矩随转速升高保持恒定,用户体验的加速度更大,车速为持续增加,而在经济模式中,同样油门下,扭矩对比运动模式输出值更小,同时扭矩随转速下掉而趋进于零,此时车速随转速升高保持平衡,不再继续增加,进而达到经济可控的目的。
40.本实施例中,d1大于d2,其中,d1一般取值为7米以上,公共道路中最窄的两车道路口为7米,d2取值为3米以内,但可根据实际情况进行调整。
41.本实施例中,起步场景分通畅起步场景(参见图5)、堵车起步场景(参见图6)和坡道起步场景(参见图7)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
