1.本发明涉及环保设备技术领域,特别涉及一种基于视觉的建筑工地渣土车清洗装置。
背景技术:
2.随着城镇化的进一步实施,我国进入了大规模的城市建设之中,目前,许多城市基本上都是规定建筑垃圾、泥巴均要由渣土运输公司的渣土车清运,而这些渣土车进出建筑工地会使其轮胎、车身带有大量的泥巴、建筑垃圾等废弃物,其在城市道路上行使势必会弄脏城市道路,现在处理的办法大多是在建筑工地门口设专人用高压水枪对渣土车轮胎、车身进行冲洗,这种清洗方法不但费时费力,在高压水枪清洗不到的地方留下死角,清洗效果不佳;或者需要渣土车停下来冲洗,冲洗一段时间直接开走,没有检测设备,而且对轮胎冲洗不充分,容易有泥沙附着,不干净;并且渣土车过重压在清洗通道的底喷嘴,容易将喷嘴压坏,影响使用效果。
技术实现要素:
3.为了解决上述技术问题,本发明实施例提供了一种基于视觉的建筑工地渣土车清洗装置,包括水泵,所述水泵与多个第一左喷头、多个第二左喷头、多个第一右喷头、多个第二右喷头、旋转喷头、第一升降喷头和第二升降喷头连接,所述第一左喷头与第二左喷头交错设置,所述第一左喷头高度高于第二左喷头高度,所述第一右喷头与第二右喷头交错设置,所述第一右喷头高度高于第二右喷头高度,所述第一左喷头与第一右喷头之间设有旋转喷头,所述第一左喷头和第二左喷头下方都设有红外传感器,所述第一升降喷头和第二升降喷头下方都设有视觉模块,所述视觉模块与控制系统连接,所述控制系统与所述水泵、红外传感器、多个第一左喷头、多个第二左喷头、多个第一右喷头、多个第二右喷头、旋转喷头、第一升降喷头和第二升降喷头连接。
4.进一步地,所述第一左喷头与所述第一右喷头相向设置,所述第二左喷头与所述第二右喷头相向设置,所述第二左喷头和第二右喷头高度不超过0.5米。
5.进一步地,所述视觉模块采用工业相机。
6.进一步地,所述水泵设置在沉淀池内,所述沉淀池内使用滤网,所述滤网下方设有所述水泵。
7.进一步地,所述滤网与水平面呈一定角度。
8.进一步地,所述第一左喷头、第二左喷头和第一升降喷头旁设有左侧槽,所述第一右喷头、第二右喷头和第二升降喷头旁设有右侧槽,所述旋转喷头下方设有中央槽,所述左侧槽、右侧槽和中央槽与所述沉淀池连通。
9.进一步地,所述沉淀池侧面底部设有排水口,所述沉淀池靠滤网处设有排污口。
10.实施本发明实施例,具有如下有益效果:本发明无需人工费时费力清洗,也无需渣土车停下来,影响渣土车工作效率,只需渣土车开过所述基于视觉的建筑工地渣土车清洗
装置进行清洗,结构简单,无需停车,速度快,也不会由于渣土车过重,损害装置;同时通过视觉模块对渣土车外侧和轮胎进行检验洁净度,并通过第一升降喷头和第二升降喷头对检测不合格处再次清洁;清洗废水重复利用,节约水资源。
附图说明
11.为了更清楚地说明本发明所述的基于视觉的建筑工地渣土车清洗装置,下面将对实施例所需要的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
12.图1为本发明所述的基于视觉的建筑工地渣土车清洗装置俯视图;
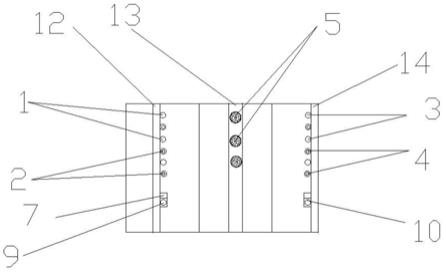
13.图2为本发明所述的基于视觉的建筑工地渣土车清洗装置主视图;
14.图3为本发明所述的基于视觉的建筑工地渣土车清洗装置侧视图;
15.图4为本发明所述的基于视觉的建筑工地渣土车清洗装置截面示意图。
16.附图中标记如下:1
‑
第一左喷头;2
‑
第二左喷头;3
‑
第一右喷头;4
‑
第二右喷头;5
‑
旋转喷头;6
‑
滤网;7
‑
视觉模块;8
‑
沉淀池;9
‑
第一升降喷头;10
‑
第二升降喷头;11
‑
水泵;12
‑
左侧槽;13
‑
右侧槽;14
‑
中央槽。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.实施例1:
19.如图1至图4所示,一种基于视觉的建筑工地渣土车清洗装置,包括水泵11,所述水泵11与多个第一左喷头1、多个第二左喷头2、多个第一右喷头3、多个第二右喷头4、旋转喷头5、第一升降喷头9和第二升降喷头10连接,所述第一左喷头1与第二左喷头2交错设置,所述第一左喷头1高度高于第二左喷头2高度,所述第一右喷头3与第二右喷头4交错设置,所述第一右喷头3高度高于第二右喷头4高度,所述第一左喷头1与第一右喷头3之间设有旋转喷头5,所述第一左喷头1和第二左喷头2下方都设有红外传感器,所述第一升降喷头9和第二升降喷头10下方都设有视觉模块7,所述视觉模块7与控制系统连接,所述控制系统与所述水泵11、红外传感器、多个第一左喷头1、多个第二左喷头2、多个第一右喷头3、多个第二右喷头4、旋转喷头5、第一升降喷头9和第二升降喷头10连接。
20.具体地,所述第一左喷头1对渣土车左侧车身进行清洗,所述第二左喷头2对渣土车底部和左侧轮胎进行清洗,所述第一右喷头3对渣土车右侧车身进行清洗,所述第二右喷头4对渣土车底部和右侧轮胎进行清洗,所述第一左喷头1与第一右喷头3之间设有旋转喷头5,旋转喷头5对渣土车底部和车辆轮胎内侧进行清洗,所述第一左喷头1、第二左喷头2和第一升降喷头9呈一条直线,所述第一右喷头3、第二右喷头4和第二升降喷头10呈一条直线,所述第一升降喷头9和第二升降喷头10设置在出口处,渣土车经多个第一左喷头1、多个第二左喷头2、多个第一右喷头3、多个第二右喷头4和旋转喷头5的充分清洗已经干净,所述
第一升降喷头9和第二升降喷头10下方设有视觉模块7,对车身泥土块进行识别,控制器接收视觉模块7识别的信号,控制第一升降喷头9和第二升降喷头10喷水方向和高度,对渣土车识别的泥土块进行再次冲洗,结构简单,冲洗方便。
21.具体地,所述第一左喷头1和第二左喷头2下方都设有红外传感器,识别车辆开过信号,所述控制器与所述红外传感器连接,所述控制器接收第一左喷头1下方红外传感器识别的信号,控制器控制第一左喷头1、第一右喷头3和旋转喷头5的工作;所述控制器接收第二左喷头2下方红外传感器识别的信号,控制器控制第二左喷头2和第二右喷头4的工作。
22.进一步地,所述第一左喷头1与所述第一右喷头3相向设置,所述第二左喷头2与所述第二右喷头4相向设置,所述第二左喷头2和第二右喷头4高度不超过0.5米。
23.优选地,所述视觉模块7采用工业相机,工业相机识别准确,价格便宜。
24.优选地,所述水泵11设置在沉淀池8内,所述沉淀池8内使用滤网6,所述滤网6下方设有所述水泵11。
25.优选地,所述第一左喷头1、第二左喷头2和第一升降喷头9旁设有左侧槽12,所述第一右喷头3、第二右喷头4和第二升降喷头10旁设有右侧槽13,所述旋转喷头5下方设有中央槽14,所述左侧槽12、右侧槽13和中央槽14与所述沉淀池8连通。
26.具体地,通过左侧槽12、右侧槽13和中央槽14对渣土车清洗废水进行回收,流入沉淀池8,经滤网6将大颗粒杂质过滤,对清洗废水进行重复利用。
27.优选地,所述滤网6与水平面呈一定角度,防止杂质过多影响过滤效果,滤网6倾斜设置,大颗粒杂质积累过多,会自动滑落。
28.进一步地,所述沉淀池8侧面底部设有排水口,方便定期换水清洁,结构简单处理方便,所述沉淀池8靠滤网6处设有排污口,方便对杂质进行收集。
29.实施例2:
30.一种基于视觉的建筑工地渣土车清洗装置,包括水泵11,所述水泵11与三个第一左喷头1、三个第二左喷头2、三个第一右喷头3、三个第二右喷头4、旋转喷头5、第一升降喷头9和第二升降喷头10连接,所述第一左喷头1与第二左喷头2交错设置,所述第一左喷头1高度高于第二左喷头2高度,所述第一右喷头3与第二右喷头4交错设置,所述第一右喷头3高度高于第二右喷头4高度,所述第一左喷头1与所述第一右喷头3相向设置,所述第二左喷头2与所述第二右喷头4相向设置,所述第一左喷头1与第一右喷头3之间设有旋转喷头5,所述第一左喷头1和第二左喷头2下方都设有红外传感器,所述第一升降喷头9和第二升降喷头10下方都设有视觉模块7,所述视觉模块7与控制系统连接,所述控制系统与所述水泵11、红外传感器、多个第一左喷头1、多个第二左喷头2、多个第一右喷头3、多个第二右喷头4、旋转喷头5、第一升降喷头9和第二升降喷头10连接。
31.具体地,所述三个第一左喷头1与所述三个第二左喷头2交错设置,所述三个第一右喷头3与所述三个第二右喷头4交错设置,所述三个第一左喷头1、所述三个第二左喷头2与第一升降喷头9呈一条直线,所述三个第一右喷头3、所述三个第二右喷头4与第二升降喷头10呈一条直线;所述所述第一左喷头1与所述第一右喷头3相向设置,所述第二左喷头2与所述第二右喷头4相向设置,所述第一左喷头1与第一右喷头3之间设有旋转喷头5,所述第一左喷头1、相应的第一右喷头3和相应的旋转喷头5呈一条直线且连接同一条水路,所述第二左喷头2与相应所述第二右喷头4呈一条直线且连接同一条水路。
32.优选地,所述第二左喷头2和第二右喷头4高度为0.3米,方便对轮胎接底部进行冲洗。
33.优选地,所述视觉模块7采用工业相机,工业相机识别准确,价格便宜。
34.进一步地,所述水泵11设置在沉淀池8内,所述沉淀池8内使用滤网6,所述滤网6下方设有所述水泵11。
35.进一步地,所述滤网6与水平面呈一定角度。
36.进一步地,所述第一左喷头1、第二左喷头2和第一升降喷头9旁设有左侧槽12,所述第一右喷头3、第二右喷头4和第二升降喷头10旁设有右侧槽13,所述旋转喷头5下方设有中央槽14,所述左侧槽12、右侧槽13和中央槽14与所述沉淀池8连通。
37.进一步地,所述沉淀池8侧面底部设有排水口,所述沉淀池8靠滤网6处设有排污口。
38.工作过程:当渣土车开过来,最外侧的第一左喷头1下方的红外传感器识别到渣土车开进来,控制器接收最外侧的第一左喷头1下方的红外传感器采集信号,控制水泵11工作,且控制第一左喷头1、相应的第一右喷头3和相应的旋转喷头5喷水;当渣土车继续向前开,紧邻最外侧第一左喷头1的第二右喷头4的红外传感器采集渣土车开过来的信号,控制器接收紧邻最外侧第一左喷头1的第二右喷头4的红外传感器的信号,控制水泵11工作,且控制第二左喷头2和相应的第二右喷头4喷水;依次类推,当渣土车开离最外侧的第一左喷头1,最外侧的第一左喷头1的传感器采集渣土车离开信号,控制第一左喷头1、相应的第一右喷头3和相应的旋转喷头5停止工作,依次类推;当渣土车往第一升降喷头9处开,第一升降喷头9和第二升降喷头10的工业相机对渣土车泥土块进行识别,控制器接收两个工业相机采集的泥土块信息并控制第一升降喷头9和第二升降喷头10的喷水和喷水高度;清洗废水经左侧槽12、右侧槽13和中央槽14到达沉淀池8,经滤网6将大颗粒杂质过滤,对清洗废水进行重复利用;本发明无需人工费时费力清洗,也无需渣土车停下来,影响渣土车工作效率,只需渣土车开过所述基于视觉的建筑工地渣土车清洗装置进行清洗,结构简单,速度快,也不会由于渣土车过重,损害装置;同时通过视觉模块7对渣土车外侧和轮胎进行检验洁净度,并通过第一升降喷头9和第二升降喷头10对检测不合格处再次清洁。
39.上述说明已经充分揭露了本发明的具体实施方式。需要指出的是,熟悉该领域的技术人员对本发明的具体实施方式所做的任何改动均不脱离本发明的权利要求书的范围。相应地,本发明的权利要求的范围也并不仅仅局限于前述具体实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
