1.本发明涉及一种车辆控制装置,其根据本车辆所具有的外界传感器的输出来生成用于使所述本车辆自动向泊车空间(停车位)内泊车的移动路径。
背景技术:
2.电动助力转向装置正在普及,该电动助力转向装置通过与操作方向盘实现的操舵角对应地使转向马达旋转,来对齿条轴(rack shaft)施加推力(轴力),而对车轮施加舵角(转向角),由此改变车轮(轮胎)的方向。
3.在该电动助力转向装置中,在车辆停止的状态下进行操舵的原地打方向盘(停车状态下的满舵)时,轮胎肩部的摩擦变大,转向马达消耗大的电功率,其结果,如果是额定功率小的转向马达则有马达的性能劣化的担忧。
4.例如,日本发明专利公开公报特开平2
‑
227370号(下面称为jp1990
‑
227370a。)中公开了,在车辆停止时使对转向马达的指示电流为零,使得无法原地打方向盘(stationary steering),由此防止马达烧损(jp1990
‑
227370a的从第7页左上栏最后一行到右上栏第3行)。
技术实现要素:
5.一般而言,在入库时(例如,使车辆向俯视观察时为u字状的泊车空间泊车时),使车辆前进到按车辆后轮的最小旋转半径进入到所述泊车空间内的后退轨迹上的位置(泊车开始位置)且停车。
6.现有技术中,在所述泊车开始位置以前轮达到最大转向角的方式原地打方向盘(停车时满舵)来进行后退泊车。
7.通过生成这种移动路径,能够按仅前进和后退一次的移动路径来进行所谓的入库。
8.在必须在停车时进行原地打方向盘操作(停车时满舵)的现有技术的自动泊车技术中,停车时满舵时,需要额定功率大(主轴的最大驱动力大)的转向马达。
9.然而,额定功率大的转向马达有大型化且重量大、并且电功率消耗大的技术问题。
10.本发明是考虑到这种技术问题而完成的,其目的在于,提供一种能够通过额定功率小的转向马达来进行自动泊车的车辆控制装置。
11.本发明的一方式所涉及的车辆控制装置根据本车辆所具有的外界传感器的输出来使所述本车辆自动向泊车空间内泊车,该车辆控制装置具有泊车空间选择部、行动计划部和行驶控制部,其中,所述泊车空间选择部用于选择所述泊车空间;所述行动计划部用于生成从泊车开始位置到所选择的所述泊车空间内的泊车用的移动路径;所述行驶控制部用于按生成的所述移动路径来控制推进装置和转向马达,所述转向马达根据来自所述行驶控制部的转向指示生成驱动力,据此对齿条轴施加转向轴力来使车轮转向,所述行动计划部生成在所述泊车开始位置以小于满舵转向轴力的转向轴力使所述转向马达开始运行的所
述移动路径。
12.根据本发明的一方式,在没有原地打方向盘(停车状态的满舵)的状态下开始行驶,因此,能够以额定功率小的转向马达进行自动泊车。
13.通过参照附图对以下实施方式所做的说明,上述的目的、特征及优点应易于被理解。
附图说明
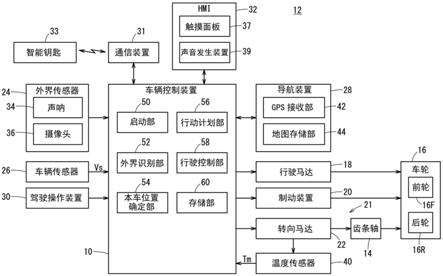
14.图1是表示具有实施方式所涉及的车辆控制装置的车辆的结构例的框图。图2a是表示满舵转向轴力的车速特性的特性图。图2b是最大驱动力的马达温度特性图。图2c是将图2b所示的最大驱动力的马达温度特性与图2a所示的满舵转向轴力的车速特性叠加来进行说明的特性图。图3是用于说明实施方式所涉及的车辆控制装置中的泊车移动路径的生成动作的流程图。图4是表示处于停车状态的车辆搜索泊车空间(可泊车空间)时的位置关系的概略俯视图。图5是表示想要自动泊车的车辆停止在泊车移动路径的开始位置的状态的概略俯视图。图6a是用于说明从比较例所涉及的车辆控制装置生成的泊车移动路径的开始位置到泊车空间的结束位置为止的移动路径的概略俯视图。图6b是用于说明从实施方式所涉及的车辆控制装置生成的泊车移动路径的开始位置到泊车空间的结束位置为止的移动路径的概略俯视图。图7a是用于说明从实施方式所涉及的车辆控制装置生成的泊车移动路径的开始位置到宽度狭窄的泊车空间的结束位置为止的移动路径的概略俯视图。图7b是用于说明从实施方式所涉及的车辆控制装置生成的泊车移动路径的另一开始位置到宽度宽的泊车空间的结束位置为止的另一移动路径的概略俯视图。
具体实施方式
15.下面,列举实施方式且参照附图对本发明所涉及的车辆控制装置详细进行说明。
16.[实施方式][结构]图1是表示具有实施方式所涉及的车辆控制装置10的四轮的车辆(本车辆)12的结构例的框图。
[0017]
如图1所示,除了包括车辆控制装置10之外,车辆12还包括左右的前轮通过齿条轴14转向的车轮(能转向的前轮16f和作为从动轮的后轮16r)16。
[0018]
车辆12还具有行驶马达(推进装置)18、制动装置20、转向马达22、外界传感器24、车辆传感器26、导航装置28、驾驶操作装置30、通信装置31和hmi(human machine interface:人机界面)32作为与所述车辆控制装置10连接的结构要素。
[0019]
与车辆控制装置10连接的上述结构要素能够通过can(controller area network:控制器局域网)等通信线相互传递信号。
[0020]
行驶马达18对车轮16(前轮16f和/或后轮16r)施加推进力(前进力或后退力)来使车辆12行驶。另外,该实施方式所涉及的车辆12是以电池为动力源的电动汽车(包括燃料电池车辆),但也可以是代替行驶马达18而使用内燃机和变速器的内燃机汽车,也可以是使用双方的混合动力汽车。
[0021]
制动装置20是对车轮16(前轮16f和/或后轮16r)施加制动力的装置,例如包括将制动片按压在制动盘上的制动钳和向制动钳供给液压的电动缸。制动装置20也可以包括限制车轮16的旋转的电动泊车制动装置(epb)。
[0022]
转向马达22在主轴上具有小齿轮,与齿条轴14形成齿条齿轮机构,通过对沿车宽方向延伸的齿条轴14施加轴向上的力(称为齿条轴力或者仅称为轴力或者转向轴力。)来对车轮16(前轮16f)施加舵角(转向角)。在此,用于改变车轮16(前轮16f)的转向角的转向马达22、所述小齿轮和齿条轴14形成转向系统21。另外,在转向系统21中,也可以设置使转向马达22的主轴的旋转驱动力(马达驱动力)增倍的减速机构。
[0023]
行驶马达18、制动装置20及转向马达22由车辆控制装置10进行控制。
[0024]
外界传感器24包括声呐34和摄像头36。外界传感器24也可以包括毫米波雷达、激光雷达。
[0025]
外界传感器24将检测结果(外界信息)输出给车辆控制装置10。
[0026]
声呐34是超声波传感器,向车辆12的周围发射超声波,且捕捉其反射波来检测车辆12外的周边物体的位置(距离和方向,包括泊车空间)。声呐34在车辆12的后部和前部分别设置多个。在该实施方式中,声呐34在后保险杠上左右设置两对,在前保险杠上左右设置两对,在车辆12的左右侧面前端和后端分别设置一对,合计设置有六对。
[0027]
设置在后保险杠上的声呐34主要检测位于车辆12后方的物体的位置。设置在前保险杠上的声呐34主要检测位于车辆12的前方的物体的位置。设置于车辆12的左右侧面前端的声呐34分别检测位于车辆前端的左右外侧的物体的位置,设置于车辆12的左右侧面后端的声呐34分别检测位于车辆后端的左右外侧的物体的位置。通过设置在左右侧面前端和左右侧面后端的声呐34,能够检测位于车辆12的侧面的泊车空间{如果泊车空间为u字状,则检测开口长度(宽度)和进深}。
[0028]
摄像头36是拍摄车辆12周围的装置。摄像头36包括拍摄车辆12前方的前方摄像头和拍摄后方的后方摄像头。摄像头36可以包括设置在车辆12的后视镜设置位置附近且拍摄左右侧部后方的左右一对后视镜摄像头。
[0029]
摄像头36还包括设置于中柱(b柱)且拍摄车辆12的左右外侧的左右一对柱摄像头。能够由摄像头36检测泊车空间,且能够使兼作hmi32的显示部(显示器)的触摸面板(泊车空间选择部)37上显示包括泊车空间的附近的图像。
[0030]
车辆传感器26包括用于检测车辆12的速度(车速vs)的车速传感器、用于检测加速度的加速度传感器、用于检测绕铅垂轴的角速度的偏航角速率传感器、检测车辆12的朝向的方位传感器等。
[0031]
另外,在车辆传感器26中,还包括为了便于理解而分为多个功能块来描述的温度传感器40。温度传感器40检测转向马达22的绕线(铜)的温度作为转向马达22的温度(马达温度)tm,且输出给车辆控制装置10。
[0032]
车辆控制装置10与智能钥匙(便携式设备)33之间通过通信装置31进行无线通信。
[0033]
导航装置28是获取车辆12的当前位置,且进行向目的地的路径引导等的装置,具有gps接收部(定位传感器)42和地图存储部44。gps接收部42根据从人造卫星(定位卫星)接收到的信号来确定车辆12的位置(纬度和经度)。
[0034]
地图存储部44由硬盘等公知的存储装置构成,存储有地图信息。
[0035]
驾驶操作装置30设置在车厢内,受理乘员为了控制车辆12而进行的输入操作。
[0036]
驾驶操作装置30包括方向盘、加速踏板、制动踏板、换挡杆和电源开关(按压启动开关)。电源开关受理乘员进行的用于起动车辆12的输入操作。
[0037]
另外,车辆12是以电池(包括燃料电池)为动力源的电动汽车,在该实施方式中,通过所谓的线控方式产生行驶马达18的推进力、转向马达22的转向力以及制动装置20的制动力。
[0038]
驾驶操作装置30还可以包括电动泊车制动装置用的开关。
[0039]
驾驶操作装置30包括分别检测开关的位置(包括接通(on)、断开(off))、模拟的操作量的操作量传感器,且将表示操作的信号(开关位置和操作量信号)输出给车辆控制装置10。
[0040]
hmi32通过显示和语音向乘员告知各种信息,并且受理乘员的输入操作。hmi32包括受理输入操作的兼作显示部的触摸面板37、蜂鸣器、扬声器等声音发生装置39。另外,hmi32也可以是兼作触摸面板的智能屏互联系统(display audio)。另外,hmi32也可以使用导航装置28的一部分功能来构成。
[0041]
车辆控制装置10是包括cpu、rom、ram等的电子控制装置(ecu)。车辆控制装置10通过cpu按程序执行运算处理来执行各种车辆控制。车辆控制装置10也可以构成为硬件。
[0042]
车辆控制装置10具有使车辆12向泊车空间自动泊车的功能。
[0043]
为了进行自动泊车控制,车辆控制装置10具有启动部50、外界识别部52、本车位置确定部54、行动计划部56、行驶控制部58的各功能部和存储部60。
[0044]
启动部50根据来自驾驶操作装置30中的电源开关的信号,进行智能钥匙33的认证,判定智能钥匙33是否位于车内。当智能钥匙33被认证且智能钥匙33位于车内时,启动部50使行驶控制部58能够驱动行驶马达18和转向马达22。另外,当hmi32的触摸面板37上所显示的自动泊车按钮被设为接通状态,并且选择了显示在触摸面板37上的泊车空间时,启动部50使行动计划部56开始进行自动泊车控制。
[0045]
外界识别部52根据外界传感器24的检测结果来识别位于车辆12周边的例如泊车车辆、停车车辆、岩石、墙壁、围挡物等障碍物,并获取与障碍物有关的位置、大小等信息。
[0046]
另外,外界识别部52根据图案匹配等公知的图像分析方法来分析由摄像头36获取到的图像,由此获取障碍物的有无及其大小。
[0047]
并且,外界识别部52使用来自声呐34的信号计算距障碍物的距离,获取障碍物的位置,其结果,获取泊车空间的大小(面积)。
[0048]
本车位置确定部54根据来自导航装置28的gps接收部42的信号来检测车辆12的位置。
[0049]
另外,本车位置确定部54也可以除了获取来自gps接收部42的信号之外,还从车辆传感器26获取车速vs和偏航角速率,并使用所谓的惯性导航法来确定车辆12的位置及姿势。
[0050]
外界识别部52能够根据外界传感器24的检测结果,更具体而言,根据图案匹配等公知的图像分析方法来分析由摄像头36拍摄到的图像,例如根据在停车场等的路面上绘制的白线的位置来获取泊车空间。
[0051]
行驶控制部58根据包括来自行动计划部56的移动路径(包括自动泊车用的移动路径)的对行驶控制的指示,控制行驶马达18、制动装置20及转向马达22来使车辆12行驶。
[0052]
存储部60由ram和rom(包括可改写的非易失性存储器)构成,存储行动计划部56和行驶控制部58的处理所需的信息。
[0053]
当乘员向hmi32进行输入时,行动计划部56根据需要计算成为车辆12的移动路径(包括自动泊车用的移动路径)的轨迹,且向行驶控制部58输出行驶控制的指示。
[0054]
图2a的横轴表示车速vs[km/h],纵轴表示转向轴力fs[kn],示出在自动泊车控制处理中适用的与车型对应地预先存储于存储部60的满舵转向轴力ffull[kn]的车速特性102。
[0055]
原地打方向盘时的满舵转向轴力ffull在停车时的车速vs为vs=0[km/h]时,由于对车轮16(尤其是前轮16f)的轮胎施加的摩擦最大,而达到最大。满舵转向轴力ffull具有以下特性:当车速vs从停止时的vs=0开始增加时,满舵转向轴力ffull急剧下降,在此之后满舵转向轴力ffull随着车速vs的增加而缓缓地下降,当超过车速vs为数[km/h]左右的自动泊车行驶时的最大车速vmax(=数[km/h])时满舵转向轴力ffull成为大致固定值。
[0056]
另外,满舵转向轴力ffull[kn]的特性102为,根据轮胎与路面之间的摩擦系数,在纵轴上上下移动(大致平行移动),但在图2a及下面说明的图2c中,将满舵转向轴力ffull[kn]的车速特性102设定为考虑到满舵转向轴力ffull[kn]达到最高的最差情况的干燥路面(摩擦系数高的路面)时的特性。也可以检测干燥路面、湿润的路面等的路面状态来变更特性的设定。
[0057]
图2b表示转向马达22能对齿条轴14施加的最大驱动力(额定驱动力)fmax[kn]的马达温度特性104。具有以下特性:当马达温度tm[℃]变高时,由于卷线(铜)的电阻值变高,因此在同一额定功率(电功率)下,流经转向马达22的电流变小,能由转向马达22对齿条轴14施加的最大驱动力fmax降低。
[0058]
为了便于说明,图2c是在图2a所示的满舵转向轴力ffull的车速特性102上叠加图2b所示的转向马达22的最大驱动力fmax的马达温度特性104来表示的特性图。
[0059]
如图2c所示,与马达温度tm的高低成正比,最大驱动力fmax的值在图2c的纵轴上上下移动。
[0060]
由图2c可知,在转向系统21(转向马达22)的负荷达到最大的车速vs从vs=0到vs=阈值车速vth的区域中,满舵转向轴力ffull[kn]超过额定功率小的转向马达22的最大驱动力fmax。
[0061]
因此,如图2c所示,在满舵转向轴力ffull的特性102与最大驱动力fmax的交点的阈值车速vth以下的区域,满舵转向轴力ffull被限制为用粗实线绘制出的特性(有限制的车速特性)102a,该特性102a被限制在转向马达22的最大驱动力fmax。
[0062]
[动作]参照图3所示的流程图对基本上如以上那样构成的车辆控制装置10的自动泊车处理动作进行说明。另外,流程图所涉及的程序的执行主体是车辆控制装置10(尤其是行动计
划部56)。
[0063]
在步骤s1中,行动计划部56判定是否在hmi32上进行了自动泊车开关的接通操作(乘员对自动泊车按钮的触摸操作)。
[0064]
通常,在车辆12已进入目的地的停车场时的停车时、或者已接近某一停车场时的停车时,乘员对显示在hmi32的触摸面板37上的自动泊车开关的图标进行接通操作。
[0065]
当检测到自动泊车开关的接通操作(步骤s1:是)时,行动计划部56开始自动泊车处理。
[0066]
图4是表示在对自动泊车开关进行了接通操作的位置停车的车辆(本车辆)12搜索泊车空间(可泊车空间)76时的位置关系的概略俯视图。
[0067]
在步骤s2中,行动计划部56搜索并提取可泊车空间(泊车空间)。因此,行动计划部56通过行驶控制部58,使车辆12在道路70上沿箭头方向直行。并且,在行驶控制部58使车辆12直行期间,行动计划部56根据来自外界传感器24的信号,获取障碍物(车辆71~74和围墙等围挡物75)的位置及大小和在道路70的路面上绘制的白线的位置。
[0068]
然后,如图5所示,行动计划部56通过行驶控制部58,使车辆12在已超过泊车空间76的规定位置(泊车移动路径的开始位置)78停车。
[0069]
在该情况下,行动计划部56根据获取到的障碍物(车辆71~74)的位置及大小和白线,提取可泊车的空间(以下称为泊车空间)76。
[0070]
接着,在步骤s3中,行动计划部56在hmi32(触摸面板37)上显示包括泊车空间76的概略俯视图(大致图5所示的示意性的图像),且通过声音发生装置39向乘员告知存在泊车空间76的意思。此时,行动计划部56可以对由摄像头36获取到的图像进行坐标转换得到俯视图像且重叠显示在触摸面板37上。
[0071]
接着,在步骤s4中,当通过乘员的触摸操作在作为泊车空间选择部来发挥作用的hmi32(触摸面板37)中选择了泊车空间76时(步骤s4:是),hmi32(触摸面板37)向行动计划部56输出与所输入的泊车空间76对应的信号,进入步骤s5。另外,在没有选择泊车空间76(步骤s4:否)的情况下,重复步骤s2以后的处理直到选择了泊车空间76为止。
[0072]
当选择了泊车空间76时,在步骤s6中计算泊车移动路径(还简称为移动路径)之前,在步骤s5中,行动计划部56求出取决于马达温度tm的转向马达22的最大驱动力fmax。即,在通过温度传感器40检测到作为转向马达22的温度的马达温度tm[℃]之后,行动计划部56参照存储在存储部60中的图2b所示的马达温度特性104,计算转向马达22的当前的(在检测到的马达温度tm[℃]下的)最大驱动力fmax[kn]。
[0073]
这样,转向马达22的当前的最大驱动力fmax[kn]取决于车辆12在规定位置78停车时的外部气温、马达温度tm,该马达温度tm根据直到在规定位置78停车为止的转向马达22的工作状态等。
[0074]
另外,图2b中,马达温度tm[℃]轴上的阈值温度tth[℃]是转向马达22的最大允许温度(额定温度),以马达温度tm[℃]不超过阈值温度tth[℃]的方式来驱动转向马达22。
[0075]
接着,在步骤s6中,行动计划部56生成(计算)从作为车辆12的泊车移动路径的开始位置的当前位置(规定位置78),到作为泊车移动路径的结束位置的泊车空间76内的移动路径(轨迹)。优选为将计算出的移动路径显示在触摸面板37上。
[0076]
图6a是说明比较例所涉及的车辆控制装置生成的从规定位置(泊车移动路径的开
始位置)78开始的移动路径80的概略俯视图。在此,车辆12处于停止状态的规定位置78为,当具有比实施方式的转向马达22大的额定功率(最大驱动力fmax)的比较例的转向马达的车辆12在该规定位置78原地打方向盘{在停车时(车速vs=0[km/h])将前轮16f向左打满舵}时,按该车辆12的后轮16r的最小旋转半径进入到泊车空间76内的移动路径(后退轨迹)80(图6a)上的位置(泊车开始位置)。即,比较例的泊车移动路径80被设定为,从规定位置78开始一次也无需进退切换而进入到泊车空间76内的泊车移动路径80。
[0077]
但是,当具有相对较小的额定功率的实施方式的转向马达22的车辆12想要按这种比较例的泊车移动路径80开始行驶时,如图2c所示,用于在阈值车速vth以下的车速vs下对前轮16f原地打方向盘的满舵转向轴力ffull会超过在转向马达22的额定功率下能产生的最大驱动力fmax。在该情况下,假设当为了使前轮16f满舵而以额定功率以上的电功率驱动转向马达22时,有马达温度tm上升到超过额定温度而使转向马达22劣化的可能性。
[0078]
为了避免这种事态发生,在该实施方式中,如图1、图2c及图6b所示,行动计划部56将转向马达22的驱动力抑制在最大驱动力fmax或者最大驱动力fmax以下,直到车速vs从vs=0(规定位置78)达到超过阈值车速vth的车速vs(满舵转向轴力ffull变为与最大驱动力fmax相等的阈值车速vth)为止。
[0079]
据此,生成在规定位置(泊车移动路径的开始位置)78以不打满舵转向的方式开始移动(行驶),在此之后能进退切换一次而向泊车空间76后退泊车的移动路径82。该移动路径82形成为,在行驶中的车速vs超过阈值车速vth的情况下包括通过转向马达22执行满舵转向的移动路径82。
[0080]
即,在该实施方式中,由温度传感器40来检测构成转向系统21的转向马达22的加热状态。计算在由温度传感器40检测到的马达温度tm[℃]下能输出的最大驱动力fmax(图2b),将对转向马达22施加的负荷高的车速vs为vs=0[km/h]时的转向轴力fs[kn]设定为小于最大驱动力fmax的值。
[0081]
这样一来,该实施方式的车辆12自动泊车时,避免原地打方向盘(停止时满舵),即使增加进退切换,也通过增加负荷低的行驶中转向(也可以包括行驶中满舵。)的比率,来防止在所设定的移动路径上的自动泊车控制的过程中由于转向马达22过热而导致行驶被禁止的情况。
[0082]
在步骤s7中,行驶控制部58按在步骤s6中由行动计划部56生成的移动路径82(图6b)控制行驶马达18、制动装置20和转向马达22来控制车辆12的行驶,在步骤s8中,当判定为车辆12已移动到泊车空间76内(泊车移动路径82的结束位置)时(步骤s8:是),使车辆12停车。
[0083]
在该情况下,如图7a所示,在实施方式所涉及的车辆控制装置10中,通过按包括进退切换的移动路径(从泊车开始位置即规定位置78到开口狭窄的泊车空间76
′
的位置即泊车结束位置为止的移动路径)82来控制车辆12的行驶,即使在宽度狭窄的泊车空间76
′
中也能进行泊车。
[0084]
另外,如图7b所示,在向与图6a、图6b同样宽的泊车空间76泊车的情况下,行动计划部56预先使车辆12前进到比规定位置78略微靠前方的另一规定位置78
′
之后停止,作为用于后退泊车的开始位置。
[0085]
在这样将开始位置设定为比规定位置78靠前方的规定位置78
′
的情况下,新的泊
车用的移动路径82
′
设定有助跑用的后退行驶路径84,该后退行驶路径84用于以执行后退行驶的方式在达到规定位置78(在该情况下,规定位置78为行驶通过位置)之前,将车速vs从vs=0(规定位置78
′
的车速)提高到vs=vth(规定位置78的车速)的路径。并且,设定为将移动路径(后退轨迹)80连续地连接于该后退行驶路径84的移动路径82
′
,其中移动路径80是按该车辆12的后轮16r的最小旋转半径进入到泊车空间76内的路径。
[0086]
在该移动路径82
′
中,在规定位置78以后的移动路径80中,以低于转向马达22的最大驱动力fmax的满舵转向轴力ffull使车辆12满舵,向泊车空间76泊车。
[0087]
向泊车空间76移动完成后,在步骤s9中,行动计划部56进行使车辆12泊车的泊车处理。在该泊车处理中,行动计划部56通过行驶控制部58驱动制动装置20。在此之后,行动计划部56通过行驶控制部58使未图示的电动泊车制动工作。这样一来,当车辆12的停止完成时,行动计划部56在hmi32的触摸面板37上进行表示泊车已完成的泊车完成显示,并且通过声音发生装置39向乘员告知泊车已完成的意思。
[0088]
在此之后,乘员下车,用智能钥匙33锁车。
[0089]
[根据实施方式能掌握的发明]在此,下面记载根据上述实施方式能掌握的发明。另外,为了便于理解,对结构要素标注在上述实施方式中使用的标记,但该结构要素并不限定于带有该标记的结构要素。
[0090]
本发明所涉及的车辆控制装置10根据本车辆12所具有的外界传感器24的输出来使所述本车辆12自动向泊车空间76、76
′
内泊车,该车辆控制装置10具有泊车空间选择部37、行动计划部56和行驶控制部58,其中,所述泊车空间选择部37用于选择所述泊车空间76、76
′
;所述行动计划部56用于生成从泊车开始位置78、78
′
到所选择的所述泊车空间76、76
′
内的泊车用的移动路径80、82、82
′
;所述行驶控制部58用于按生成的所述移动路径80、82、82
′
来控制推进装置18和转向马达22,所述转向马达22根据来自所述行驶控制部58的转向指示生成驱动力,据此对齿条轴14施加转向轴力fs来使车轮16(前轮16f)转向,所述行动计划部56生成在所述泊车开始位置78、78
′
以小于满舵转向轴力ffull的转向轴力fs使所述转向马达22开始运行的所述移动路径80、82、82
′
。
[0091]
根据该结构,由于在没有原地打方向盘(停车状态的满舵)的状态下开始行驶,因此,能够以额定功率小的转向马达22进行自动泊车。
[0092]
另外,在本发明所涉及的车辆控制装置10中,所述行动计划部56将在所述泊车开始位置78、78使转向马达开始运行的小于所述满舵转向轴力ffull的转向轴力fs抑制为能够在所述转向马达22的驱动力的最大驱动力fmax以下产生的转向轴力fs。
[0093]
根据该结构,在移动路径80、82、82
′
的泊车开始位置78、78
′
,将转向轴力fs抑制在转向马达22的最大驱动力fmax以下的转向轴力fs来开始行驶,因此,能够以额定功率小的转向马达22进行自动泊车。
[0094]
并且,在车辆控制装置10中,所述行动计划部56生成在所述移动路径80、82、82
′
上行驶的过程中包括满舵转向的所述移动路径80、82、82
′
。
[0095]
根据该结构,在没有原地打方向盘(停车状态的满舵)的状态下开始行驶,据此,降低转向马达22的负荷以使转向轴力(齿条轴力)fs不超过马达最大驱动力fmax的方式进行保护,另一方面,生成在满舵转向轴力ffull小于马达最大驱动力fmax的行驶过程中(vs<vth),包含所述满舵转向的移动路径80、82、82
′
,因此能够以额定功率小的转向马达22灵敏
地自动泊车。
[0096]
并且,优选为,在车辆控制装置10中,所述推进装置是行驶马达18。
[0097]
根据该结构,行驶马达18和转向马达22的动力源均是电池的电功率,能够抑制所述电池的额定功率(抑制大型化、大重量化)。另外,有利于环境保护。
[0098]
并且,在车辆控制装置10中,优选为,在所述移动路径80、82、82
′
中的车速vs超过所述转向马达22的最大驱动力fmax的小于阈值车速vth的区域内禁止所述满舵。
[0099]
根据该结构,能够可靠地进行转向马达22的升温抑制保护。
[0100]
另外,本发明并不限定于上述实施方式,当然能够根据本说明书的记载内容而采用各种结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
