1.本实用新型涉及巡检机器人技术领域,具体是一种行走在滑索上的农业巡检机器人。
背景技术:
2.巡检机器人目前主要分为轮式巡检机器人、轨道式巡检机器人以及无人机,目前,在我国传统的农业巡检方式为人工巡检,但传统的人工巡检一般是枯燥、重复性强、机械性、耗时费力和劳动密集型的工作,并且巡检易受天气问题影响,类似自动化应用主要在于电力、管道、核能、水下船舶等产业,但上述产业内类似技术成本较高且有一定的局限性。
3.因此,基于具体农业生产环境与现实条件考虑,设计一种稳定且低成本的行走在滑索上的巡检机器人来代替人工执行农业巡检工作是必要的。
技术实现要素:
4.本实用新型旨在通过提供一种行走在滑索上的农业巡检机器人来解决背景技术中存在的缺点。
5.为了实现所述发明目的,本实用新型采用如下技术方案:
6.一种行走在滑索上的农业巡检机器人,包括塔架、滑索轨道、机器人箱体、红外热成像机、3dlidar 相机、全景相机、步进电机、加紧轮、rfid标签,其特征在于,所述机器人箱体包括传感器、安装板、步进电机和加紧轮,安装板将空间分为箱体内部与外部,步进电机安装至箱体内部,连接加紧轮,温湿度传感器安装至箱体外部顶部,巡检机器人可行走于由所述塔架与滑索轨道所搭建的线路上。
7.作为本实用新型的进一步优化方案,所述塔架为2个等高且存在水平距离支架,之间采用三根成三角形分布缆索连接,其中一根为电缆,作为通电线,另两根为钢缆,作为所述滑索轨道。
8.作为本实用新型的进一步优化方案,作为本实用新型的进一步优化方案,所述红外热成像机、3d lidar相机和全景相机为三种不同作用相机,可采集多种巡检数据。
9.作为本实用新型的进一步优化方案,所述滑索轨道上放置rfid标签,采集移动数据,实现精确移动定位。
10.作为本实用新型的进一步优化方案,所述机器人箱体内部放置蓄电池作为预备电源。
附图说明
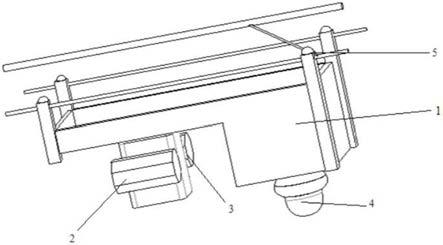
11.图1为本实用新型的整体示意图。
12.图2为本实用新型的行驶轨道示意图。
13.图3为本实用新型内部结构示意图。
14.图4为本实用新型的控制系统内部模块连接结构示意图。
15.图中:1、巡检机器人箱体,2、红外热成像机,3、3d点云相机,4、光学全景相机,5、同步轮,6、导轨,7、导轨,8、通电线,9、rfid标签,10、减速器,11、工业控制机,12、wifi无线收发模块, 13、步进电机,14充放电控制器,15、蓄电池。
具体实施方式
16.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行详细说明。
17.本发明公开了一种行走在滑索上的农业巡检机器人,结合图1、图2、图3、图4,其中图1为巡检机器人主体部分,包括机器人箱体1、红外热成像机2、3d点云相机3、光学全景相机4以及同步轮5,其中箱体内由工业控制机11连接各个单元。图2为巡检机器人导轨,主要包括轨道6、轨道7以及通电线8,并在导轨6与导轨7上放置rfid标签9,机器人箱体1通过同步轮5连接在轨道下方悬挂,通电线8接入箱体内与蓄电池和充放电单元连接实现供电与蓄电池充电功能。
18.箱体下方为数据采集单元,包括红外热成像机2、3d点云相机3和光学一体全景相机4,其中红外热成像机2和3d点云相机3通过云台相连,实现相机的多角度旋转。
19.箱体内部为充放电控制器14和蓄电池15、与蓄电池连接的步进电机13和减速机10、与步进电机13 与减速机10连接的同步轮5,同步轮5与导轨6、导轨7相连,通讯控制组件为wifi无线收发模块12;充放电控制器14、步进电机13与wifi无线收发模块12均连接工业控制机11。
20.本发明使用时,通电线8连接蓄电池15与充放电控制器14,上位机平台通过wifi无线收发模块12 发送指令到工业控制机11,工业控制机11解析收到的信号将指令传输,实现驱动步进电机13的行进或云台的操作,通过计算电机转速与标签定位信息实现精确定位。红外热成像机2、3d点云相机3、光学一体全景相机4通过rs485口与工业控制机连接,工业控制机接收并存储获取图像和视频数据,全天候全自动实现对果园的多种图像数据的获取与巡检。
技术特征:
1.一种行走在滑索上的农业巡检机器人,包括塔架、滑索轨道、机器人箱体、红外热成像机、3d lidar相机、全景相机、步进电机、加紧轮、rfid标签,其特征在于:所述机器人箱体包括传感器、安装板、步进电机和加紧轮,安装板将空间分为箱体内部与外部,步进电机安装至箱体内部,连接加紧轮,温湿度传感器安装至箱体外部顶部,巡检机器人可行走于由所述塔架与滑索轨道所搭建的线路上。2.根据权利要求1所述的一种行走在滑索上的农业巡检机器人,其特征在于:所述塔架为2个等高且存在水平距离支架,之间采用三根成三角形分布缆索连接,其中一根为电缆,作为通电线,另两根为钢缆,作为所述滑索轨道。3.根据权利要求1所述的一种行走在滑索上的农业巡检机器人,其特征在于:所述红外热成像机、3d lidar相机和全景相机为三种不同作用相机,可采集多种巡检数据。4.根据权利要求1所述的一种行走在滑索上的农业巡检机器人,其特征在于:所述滑索轨道上放置rfid标签,采集移动数据,实现精确移动定位。5.根据权利要求1所述的一种行走在滑索上的农业巡检机器人,其特征在于:所述机器人箱体内部放置蓄电池作为预备电源。
技术总结
本实用新型公开了一种具有红外热成像机、3D点云相机和光学全景相机的一种行走在滑索上的的农业巡检机器人,属于巡检机器人技术领域,包括巡检机器人本体以及供巡检机器人本体巡检移动的滑索轨道,所述滑索轨道上方安装通电线,通电线与巡检机器人箱体内的充放电控制单元连接,为蓄电池与巡检机器人提供电能,工业控制机连接三种相机、WIFI无线传输模块和步进电机,上位机发送通过无线发送指令到工业控制机,随后解析指令驱动步进电机实现巡检机器人的行进。本实用新型可自动获取多种巡检数据,大大节省人工巡检成本,提高巡检效率和效果,降低发生安全事故的概率。降低发生安全事故的概率。降低发生安全事故的概率。
技术研发人员:张森 韩冰 黄铝文
受保护的技术使用者:西北农林科技大学
技术研发日:2020.12.27
技术公布日:2021/9/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

